Milind Kamble*![]() | Rajankumar Bichkar
| Rajankumar Bichkar![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Human activity recognition (HAR) plays a crucial role in various domains, including surveillance systems, human-computer interactions, and healthcare monitoring. This paper presents an approach to improve the HAR system by using an optimized feature selection method called the Improved Seagull Optimization algorithm (I-SGO) and utilizing a proposed hybrid classifier. The HAR process begins with the fusion of spatio-temporal and texture-based features, forming a comprehensive feature set. Subsequently, I-SGO is applied for feature selection, and the selected features are used to train an optimized hybrid classifier. The hybrid classifier comprises a support vector machine (SVM) and k-nearest neighbor (k-NN), with their outputs combined and fed as input to an optimized artificial neural network (ANN) using I-SGO at various levels. The effectiveness of the proposed model is assessed on benchmark datasets, such as the UCF101-Action Recognition dataset and Human Action Clips and Segments (HACS). The experimental results provide evidence of the hybrid model's higher recognition accuracy in comparison to previous approaches. The interaction of feature selection through I-SGO and the optimization of the hybrid classifier, where the outputs of SVM and k-NN are combined as input to the ANN, contributes to robust and accurate HAR.
human activity recognition, improved seagull optimization (I-SGO), optimized hybrid classifier, support vector machine classifier, k-nearest neighbour classifier
Human activity recognition (HAR) involves the observation, assessment, and detection of human actions. It can positively impact many areas of our lives, including smart healthcare [1, 2], home monitoring [3], sports [4, 5], gaming management, and rapid detection of harmful behaviors [6]. HAR is currently being approached through computer vision and sensing devices and has been a topic of extensive research. Computer-vision-based HAR have a strong foundation and have been used in various applications. For example, researchers have designed frameworks for person re-identification [7], fall detection [8], and fitness action analysis [9]. Computer-vision-based HAR encounters numerous obstacles that must be overcome, including occlusions, alterations in viewpoints, and adverse lighting conditions.
Traditionally, human activity identification relies on pattern-based approaches involving manual feature extraction, feature selection, and the training of off-the-shelf classifiers. Standard classifiers, such as Random Forests (RF), SVM, and Hidden Markov Models (HMM) [10-12] are commonly used for activity modeling. However, these approaches have limitations, particularly in terms of scalability, adaptability, and generalization. Owing to the sensitivity of these techniques to noise and changes, high-dimensional feature vectors and manual feature engineering are required. To address these limitations, researchers have explored different aspects of HAR starting with feature extraction. Various methods have been utilized to extract features that capture lighting change tolerance [13], robustness, scale invariance, rotation invariance, and computational efficiency [14]. Extensive research has been conducted on textural features, shape and motion features, spatiotemporal descriptors [15], dynamic texture descriptors, and motion feature learning. It was observed that combining spatiotemporal features with texture-based features leads to improved accuracy and discrimination in activity recognition.
Another critical aspect of HAR is feature selection because large feature vectors can introduce computational complexities and reduce interpretability. Feature selection techniques are designed to detect a highly relevant and informative subset of features, while simultaneously reducing dimensionality. Filter, wrapper, and embedded methods were used for the feature selection. Mutual information, minimum redundancy [16], maximum relevance (mRMR), and meta-heuristic algorithms [17-19] are some approaches employed for feature selection. After choosing the features, they were used to train the HAR classifier model.
Classic pattern-based approaches that utilize single classifiers at the forefront of HAR have shown certain shortcomings in terms of accuracy, generalization, and scalability. To overcome these challenges, hybrid classifiers have been introduced in HAR to improve both accuracy and robustness [20]. By combining different classifiers, this approach aims to include a wider array of activity patterns, thereby enhancing classification performance [21-23]. Various methods such as deep learning, genetic algorithms, linear discriminant analysis (LDA), k-NN, and SVM have been integrated into hybrid classifiers [24-27]. These approaches utilize diverse feature extraction and selection techniques to maximize the use of present information. The strengths of multiple classifiers can be leveraged through hybrid approaches to improve both accuracy and robustness.
In pattern-based HAR, classifiers typically rely on spatiotemporal features extracted from activity data. Although these features effectively capture the dynamic aspects and broader context of activities, they often overlook finer details and surface characteristics of the bodies involved. This limitation can lead to incomplete representation of certain actions, which may compromise the accuracy and robustness of the HAR system, particularly when dealing with complex or subtle activities. To address this issue, integrating additional feature types such as texture-based features can provide complementary insights into the visual characteristics and appearance of activities. This approach improves the accuracy and performance of HAR systems by providing more detailed representations of their activities. However, the inclusion of more features increases the dimensionality of the feature vector, which can lead to a higher computational complexity. Consequently, using single classifiers to manage these high-dimensional vectors may be less effective, thereby affecting the overall performance of the HAR system.
To enhance the overall performance of the HAR system and address its limitations, the following measures are proposed:
•Integration of diverse types of features for comprehensive representation of activity.
•The feature selection method uses I-SGO to identify the most relevant and informative subsets of the features.
•Development of a new hybrid model employing SVM, k-NN, and ANN classifiers.
•The weights of the ANN were fine-tuned using the I-SGO optimization algorithm to improve the recognition accuracy of the proposed hybrid model.
In summary, this study sought to overcome the inadequacies of traditional pattern-based HAR by implementing an optimized hybrid classifier. The primary goal of merging several classifiers is to improve performance. The research emphasized three key areas: feature extraction, feature selection, and development of a hybrid model incorporating SVM, k-NN, and ANN classifiers.
The goal of this research is to improve the field of HAR and develop more reliable and effective systems for a variety of applications by utilizing recent advancements in machine learning and computer vision. The subsequent sections of this work are structured as follows: Section 2 provides an overview of the preprocessing and feature extraction methods used in the context of HAR. Section 3 provides a comprehensive description of the hybrid classifier model that is being presented. It includes a detailed explanation of the optimal feature selection process, which utilizes the I-SGO algorithm. Additionally, it explores the application of the I-SGO algorithm in fine-tuning the weights of the ANN. Section 4 presents the results of the study and provides an in-depth discussion. Section 5 concludes the paper by summarizing the key findings.
This paper presents an innovative method to improve HAR by analyzing real-world video sequences. The method is organized into three key phases: pre-processing, feature extraction, feature selection, and activity classification. As depicted in Figure 1, the proposed model starts with a video sequence input, referred to as Vinp. The video frames were first pre-processed using filtering and Background Subtraction (BS) to focus on the Region of Interest (ROI). After the frames were pre-processed, called imgpre, the features were extracted from them. The extracted features included the Shape and Motion Local Ternary Pattern (SMltp) (fSMltp) [28], Center Symmetric Motion Local Ternary Pattern (CS-Mltp) (fCS-Mltp) [14], Motion Boundary SIFT (MoBSIFT) (fMoBSIFT) [29], extended-speeded-up robust features(E-SURF) (fE-SURF) [30], and shape-index-based local ternary pattern (SILTP) (fSILTP) [31]. These features were concatenated as F = fSMltp + fCS-Mltp + fMoBSIFT + fE-SURF+ fSILTP to represent a single-input video file. Feature selection was performed to reduce the dimensions of the feature vectors. The I-SGO selects the optimal features (F*) from the extracted feature set F. The SGO algorithm was inspired by the migration and attack behavior of seagulls, which were mathematically modeled to emphasize the exploration and exploitation in the search space.
Figure 1. The block diagram of the proposed HAR system
For activity classification, we propose a hybrid machine-learning model that integrates SVM, k-NN, and an optimized ANN. Initially, the SVM and k-NN classifiers are trained on the optimal features, denoted as F*. The outputs from these classifiers, labeled as outSVM and outk-NN, are then used to train the ANN, which makes the final classification of human activity. To enhance the accuracy of activity classification, the ANN weights were further refined using the I-SGO method [32].
2.1 Pre-processing and extraction of features
In the initial step, the input video Vinp was processed to convert it into individual frames. Each extracted frame is referred to as img. To minimize noise, the image frame img underwent Gaussian filtering [33], as described by Eq. (1).
$img ^{{filter }}=G(a, b)=\frac{1}{2 \pi \sigma^2} e^{\left(-\frac{a^2+b^2}{2 \sigma^2}\right)}$ (1)
The variables a and b in Eq. (1) indicate the coordinates of the image, whereas σ denotes the standard deviation. The result of applying Gaussian filtering to the image frame is referred to as an imgfilter. This filtered frame was then processed using a BS to separate the ROI from the background. Five spatiotemporal features were subsequently extracted from the ROI, and all extracted features were combined to create a complete feature vector $F$ as $F=f^{S M l t p}+f^{C S-M l t p}+f^{S I L T P}+f^{M o B S L B T}+f^{E-S U R F}$.
To perform HAR, a classifier was trained using the obtained features. To represent an activity video, all extracted features were concatenated to form a complete feature vector $F$ as $F=f^{S M l t p}+f^{C S-M l t p}+f^{S L L T P}+f^{M O B S L B T}+f^{E-S U R F}$.
However, the high dimensions of the extracted features from video data can pose challenges, leading to increased computational complexity, susceptibility to noise and irrelevant features, increased storage requirements, and diminished interpretability. In order to address these drawbacks, feature selection approaches have been devised to determine the most pertinent and informative subset of features. This helps to decrease dimensionality while simultaneously preserving or enhancing the classification performance.
3.1 Optimal feature selection using I-SGO
To reduce the dimensions of feature F, an I-SGO algorithm was used, which selected the most optimal features. In I-SGO, the seagull positions are updated using migration and attack behaviors and are mathematically modelled using Eqs. (6)-(13). As shown in Algorithm 1, a population of seagulls and individual seagull positions is randomly initialized, representing subsets of features. The fitness of each seagull was calculated using the CalculateFitness() function based on the accuracy of the proposed classifier. When the stopping criterion is not met, the positions of the seagulls are updated, their fitness is assessed, and the global best solution is updated using the get GlobalBestSolution() function, if a better solution is obtained. Finally, the selected subset of features corresponding to the global best solution is returned.
|
Algorithm 1: Seagull optimization algorithm for feature selection (ISGOA) |
|
Require: Seagull position $P^{\times}$ Ensure: Optimal position $P^{\text {ghext }}$ 1: Initialize the positions $P^\alpha$ of each seagull in the population of size pop randomly, along with the parameters $f_{c, a},\ b,\ u,\ v$, and maximum iteration limit Maxiter. 2: Apply the CalculateFitness ($P^x$) function to calculate fitness values for each $P^x$ in the population. 3: Use the getGlobalBestSolution() function to find $P^{\mathrm{sext}}$ and gbestValue in the population. 4: for iter $\leftarrow 1$ to Maxiter do 5: for $i \leftarrow 1$ to pop do 6: Update the position $P^n$ of each seagull using Eqs. (6) to (13), respectively. 7: Apply the Calculate Fitness ($P^*$) function to calculate the fitness value of each updated seagull position. 8: end for 9: Use the getGlobalBestSolution() function to assess the fitness of all individuals and update $P^{g b e s t}$ and gbestValue. 10: Update the position of the seagull using Eq. (15) before the next iteration. 11: end for 12: return $P^{g b e s t}$ and gbestValue. Function: Calculate Fitness ($P^*$) Input: Seagull positions $P^{x}$ Output: Fitness values FITs [ ] 1: for $i \leftarrow 1$ to pop do 2: FITs $[i] \leftarrow$ Fitness Function $\left(P^x\right)$ using Eq. (4) 3: end for 4: return FITs [] Function: getGlobalBestSolution() Input: Fitness values FITs [] Output: Optimal position $P^{g b e s t}$ and corresponding fitness gbestValue 1: gbestValue & FITs[1] 2: for $k \leftarrow 1$ to pop do 3: if gestValue $<\operatorname{FITs}[k]$ then 4: gbestValue $\leftarrow F I T s[k]$ 5: $P^{\text {ghext }} \leftarrow P_k^x$ 6: end if 7: end for 8: return $P^{\text {gest }}$, gbestValue |
3.2 The proposed hybrid model
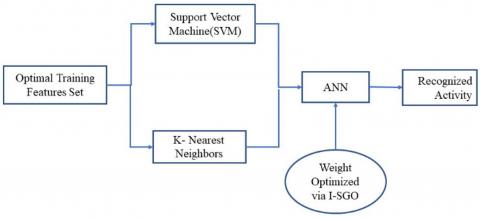
In traditional pattern-based HAR systems, actions can be classified using decision trees, SVM, HMM, and other machine learning algorithms. Problems with these methods include limited generalization, sensitivity to differences and noise, and limited ability to scale up. To address these limitations, a hybrid classifier is proposed to capture a wide range of real-world activity patterns and improve the overall classification accuracy. A hybrid machine learning model was introduced in the human activity classification phase by blending the SVM [34], k-NN [35], and optimized ANN. The constructed hybrid machine-learning model provides information regarding human activities, as shown in Figure 2. The selected features, $F^*$, were used to train the SVM and k-NN models. The results from the SVM and k-NN are called out$^{\text {SVM }}$ and out$^{k-N N}$, and they are used to train the ANN.
Figure 2. The proposed hybrid classifier model for HAR
3.3 ANN
The ANN [36] was trained by combining the output from the k-NN classifier (out$^{k-N N}$) and SVM classifier (out$^{\text {SVM }}$). The ANN consists of three layers: the input layer, the hidden layer, and the output layer. Neurons serve as the computational units inside each layer. Data is transmitted from the input layer to the hidden layer and ultimately to the output layer. The synaptic weights assigned to each link represent the strength of the connections between nodes. Eq. (2) was used to calculate the output of the node.
$out^{A N N}=f\left(\sum_{I=1}^M W_i \cdot F_i^*+\right.bias \left._i\right)$ (2)
where, $F_i^*$ is the input, $W_i$ is the weight function, and ${bias}_i$ represents the network bias. The activation function $f$, as defined in Eq. (3) is applied.
$f(x)=\frac{1}{1-e^{-x}}$ (3)
Error $E$ was computed by subtracting the output generated by the ANN model from the desired output, as specified in Eq. (4).
$E=\sum_P \sum_P\left(\right.$ Out $\left.^{A N N}-O u t_{t a r}\right)$ (4)
where, $P$ specifies the number of training patterns, $Out_{\text {tar }}$ is the desired output, and $O u t^{A N N}$ represents the output of the ANN. The final classification result for human activity was delivered by the ANN output. The classification error was determined using Eq. (4). Minimizing this error is the key objective of this study. The objective function is mathematically represented by Eq. (5):
$O b j=\min (E)$ (5)
We used a metaheuristic algorithm to obtain a solution to Eq. (5). The existing literature supports the idea that metaheuristics solve optimization problems by utilizing flexible strategies to explore solution spaces and achieve optimal or near-optimal solutions [37-42]. In addition, to improve the accuracy of HAR, the weights of the ANN were tuned via the novel I-SGO approach. The proposed I-SGO approach is a conceptual amalgamation of the standard seagull optimization algorithm (SGO).
3.4 Fine tuning the ANN weights using I-SGO
The I-SGO algorithm, as detailed in Algorithm 2, was used to fine-tune the weights of the ANN in the proposed hybrid model. The I-SGO model was developed using inspiration acquired from SGO [32, 43]. The application of I-SGO to fine-tune the weights of an ANN involves several steps. First, based on the ANN architecture, the dimension of the problem space is defined as D. Next, an initial population of potential solutions, represented by individual seagulls, is created. The size of the seagull population is represented as $рор$. Each seagull corresponds to a set of weights based on the architecture of the ANN, and the position of the $i^{t h}$ seagull is represented as $P_i^s=\left(x_i^1, x_i^2, \ldots, x_i^D\right) \quad i=1,2, \ldots, p o p$. The fitness of each individual was evaluated by training an ANN and measuring its performance using a fitness function. Subsequently, I-SGO iterations begin, in which the seagull positions are updated based on their positions and those of the others. The I-SGO model depends on the migratory and attack tendencies of seagulls in their natural habitat. The two main stages of the I-SGO model are migration (exploration) and attacks (exploitation).
|
Algorithm 2: Tuning of ANN weights using the I-SGO optimization algorithm |
|
Require: Dataset, ANN, number of iterations, population size Ensure: Optimized weights of ANN 1: Initialize ANN with random weights and biases 2: repeat 3: Divide the dataset into training and testing sets 4: Choose weights of ANN to be optimized or tuned 5: Initialize the I-SGO algorithm with the number of iterations and population size. 6: Generate the initial population of weights of ANN 7: Evaluate the fitness of each set of weights of ANN using training set 8: Update the position of the seagulls based on fitness evaluation 9: Generate new sets of weights of ANN using I-SGO 10: Evaluate the fitness of the new population of weights 11: until the Stopping criterion is met or the desired fitness the level is achieved, or the number of iterations is 12. Train the ANN on the combined training set using the selected weights 13: Evaluate the performance of the trained ANN on the testing set |
Migration (exploration): The migration behavior of a seagull is a component of global search. Seagulls migrate from one location to another. However, they must satisfy three requirements: avoiding collisions, navigating towards the optimal position, and moving in the direction of the best solution.
Collision avoidance: A new variable, a, is added to avoid collisions between neighbors. Mathematically, this condition is expressed by Eq. (6):
$\begin{gathered}C=a * P^s(x) \\ a=f_c-\left(x \times\left(\frac{f_c}{T_{max }}\right)\right)\end{gathered}$ (6)
where, $x=0,1,2, \ldots T_{\max }$, is the iteration number, $C$ denotes the position of the seagull that causes no collision, and $P^s$ is the position of the seagull in the current iteration. The value of $a$ is linearly reduced to zero from $f_c$, which controls the frequency of employing variable $a$.
Movement toward the direction of best neighbors: The seagull will navigate towards the optimal location once it ensures that it avoids collisions with other birds. This condition is mathematically represented by Eq. (7):
$M=b *\left(P^{ {best }}(x)-P^s(x)\right)$ (7)
where, M represents the position of the seagull according to the best seagull position and b is a parameter that balances the global and local searches as defined in Eq. (8), $P^{\text {best }}$ shows the best position in the population and $P^s$ is the current location of the seagull.
$b=2 * a^2 *$ rand (8)
where, rand is a randomly generated integer that falls between $[0,1]$.
Move toward the best position: The seagull strategically maneuvers to optimize its position for reaching a new destination, while ensuring it does not collide with other seagulls. As shown in Eq. (9):
$D=|C+M|$ (9)
where, D denotes the separation between the seagull and its best position seagull.
Proposed attack (exploitation): The seagull changed its angle during the migration. Using x, y, and z to describe their motion, seagulls attack their prey by spiraling in the air. This process is expressed by Eqs. (10)-(13):
$X^{\prime}=r * \cos (k)$ (10)
$Y^{\prime}=r * \sin (k)$ (11)
$Z^{\prime}=r * k$ (12)
$r=u * e^{k v}$ (13)
where, r denotes the radius of each round of spiral movement and u, v are constants of the spiral shape.
Eq. (14) describes the seagull attack behavior:
$P^s(i)=\left(D * X^{\prime} * Y^{\prime} * Z^{\prime}\right)+P^{\text {gbest }}(i)$ (14)
To enhance the attack capability, a new mathematical model was designed according to Eq. (14). The attack stage, which is represented by Eq. (14), is a local search stage that is prone to local extrema and may not yield a global solution.
$\begin{aligned} P(x) & =\left(D \cdot X^{\prime} \cdot Y^{\prime} \cdot Z^{\prime}\right)+P^{\text {gbest }}(x)+\left(\mathrm{P}^{\text {gworst }}(\mathrm{x})-\mathrm{P}(\mathrm{x})\right) \cdot \mathrm{W}^{\prime} +\left(\mathrm{P}^{\text {gbest }}(\mathrm{x})-\mathrm{P}(\mathrm{x})\right) \cdot \mathrm{W}^{\prime}\end{aligned}$ (15)
A slight adjustment to the current solution helps overcome the local extremes. To achieve this, Eq. (14) is expanded using additional components. By introducing a random perturbation in Eq. (14), the algorithm can explore neighboring regions and avoid getting stuck at local maxima. These added terms enhance the individual seagulls' ability to learn from both the global optimal position and worst position seagull. The constant W' governs the impact of the extra terms and safeguards against falling into the local extrema.
The seagull positions were updated using migration and attack patterns to fine-tune the ANN weights. The suitability of the new seagull position is validated, and the optimal solution is revised. This process was repeated until the criteria were satisfied. The ANN model used optimized weights, and its performance was tested on a real-world dataset.
4.1 Experimental setup
Experiments were conducted using two benchmark datasets to assess the performance of the proposed model.
Datasets: Dataset 1, referred to as the UCF101-Action Recognition dataset, was sourced from [44] (https://www.crcv.ucf.edu/research/data-ets/ucf101). It includes 101 action categories organized into 25 groups. Dataset 2, known as Human Action Clips and Segments (HACS), was obtained from reference [45] (http://hacs.csail.mit.edu) and comprises 200 action categories. To validate the proposed system, the feature set is partitioned into training and testing subsets.
Metrics for evaluation: The performance metrics used to comprehensively assess the proposed model included Accuracy, Sensitivity, Specificity, Precision, Recall, F1-Score, Matthews Correlation Coefficient (MCC), False Negative Rate (FNR), and False Positive Rate (FPR).
Baseline comparisons: We tested the proposed hybrid model against prevalent classifiers such as ANN, RF, SVM, and kNN, as well as the proposed hybrid model without feature selection (PWOFS), the suggested hybrid model without SGO optimization (PWOOPT), and other cutting-edge optimization algorithms such as the Seagull optimization algorithm (SGO) [43], Social spider optimization algorithm (SSO) [46], Sandpiper optimization algorithm (SOA) [47], Shark Smell Optimization (SSO) Algorithm (SSOA) [48], and Deer Hunting Optimization Algorithm (DHOA) [49]. This was performed to demonstrate the improvements achieved through I-SGO.
4.2 Hybrid classifier performance analysis
We tested the proposed method against standard classifiers as well as the proposed hybrid models without feature selection (PWOFS) and without I-SGO optimization (PWOOPT) to determine how well it worked. The outputs for datasets 1 and 2 are displayed in Tables 1 and 2, respectively.
Dataset 1: The accuracy of the proposed model was 14.1%, 9.2%, 13.4%, 11.3%, 5.7%, and 6.15% higher than that of the ANN, RF, SVM, kNN, PWOFS, and PWOOPT classifiers, respectively. In addition, the proposed model demonstrated the highest sensitivity, specificity, and precision, with the lowest FPR and FNR values. It also recorded the highest MCC and F-measure values among all compared classifier models.
Dataset 2: The accuracies of the proposed model were 12.01%, 8%, 11%, 10.5%, 4.1%, and 5.16% higher than those of existing classifiers such as ANN, RF, SVM, KNN, PWOFS, and PWOOPT, respectively. The proposed model exhibited higher sensitivity, specificity, accuracy, and F-measure values of 0.934, 0.972, 0.904, and 0.994, respectively, compared to the other classifiers. Furthermore, the proposed model also demonstrated the lowest FPR and FNR values compared to the ANN, RF, SVM, KNN, PWOFS, and PWOOPT classifiers.
Table 1. Comparison of the performance of the proposed method with ANN, RF, SVM, KNN, PWOFS, and PWOOPT classifiers on Dataset 1
|
Measures |
ANN |
RF |
SVM |
KNN |
PWOFS |
PWOOPT |
Proposed Method |
|
Accuracy |
0.84 |
0.87 |
0.83 |
0.85 |
0.904 |
0.9 |
0.959 |
|
Sensitivity |
0.12 |
0.38 |
0.31 |
0.2 |
0.719 |
0.729 |
0.859 |
|
Specificity |
0.92 |
0.71 |
0.721 |
0.92 |
0.84 |
0.82 |
0.964 |
|
Precision |
0.12 |
0.38 |
0.34 |
0.2 |
0.72 |
0.71 |
0.829 |
|
F- Measure |
0.12 |
0.38 |
0.34 |
0.2 |
0.72 |
0.72 |
0.919 |
|
MCC |
0.02 |
0.32 |
0.34 |
0.11 |
0.824 |
0.81 |
0.824 |
|
FPR |
0.08 |
0.29 |
0.279 |
0.07 |
0.016 |
0.018 |
0.036 |
|
FNR |
0.9 |
0.62 |
0.69 |
0.8 |
0.281 |
0.271 |
0.163 |
Table 2. Comparison of the performance of the proposed method with ANN, RF, SVM, KNN, PWOFS, and PWOOPT classifiers on Dataset 2
|
Measures |
ANN |
RF |
SVM |
KNN |
PWOFS |
PWOOPT |
Proposed Method |
|
Accuracy |
0.83 |
0.87 |
0.84 |
0.84 |
0.91 |
0.9 |
0.949 |
|
Sensitivity |
0.12 |
0.34 |
0.33 |
0.16 |
0.72 |
0.708 |
0.934 |
|
Specificity |
0.91 |
0.723 |
0.745 |
0.92 |
0.832 |
0.822 |
0.972 |
|
Precision |
0.12 |
0.34 |
0.327 |
0.16 |
0.729 |
0.719 |
0.904 |
|
F- Measure |
0.12 |
0.34 |
0.33 |
0.16 |
0.72 |
0.71 |
0.994 |
|
MCC |
0.02 |
0.32 |
0.33 |
0.06 |
0.88 |
0.89 |
0.915 |
|
FPR |
0.08 |
0.277 |
0.255 |
0.07 |
0.068 |
0.178 |
0.028 |
|
FNR |
0.8 |
0.66 |
0.67 |
0.8 |
0.28 |
0.292 |
0.066 |
4.2.1 Justification of the hybrid classifier
The proposed hybrid classifier combines SVM, k-NN, and ANN to maximize the capabilities of each method and improve the total performance of HAR.
SVM: This algorithm excels in high-dimensional spaces, particularly in determining optimal hyperplanes for classification. In our experiments, the SVM component attained accuracies of 83% and 84% on the UCF101 and HACS datasets, respectively, as listed in Tables 1 and 2, demonstrating its capability to handle complex feature sets.
k-NN: This algorithm offers a straightforward, yet powerful classification approach based on proximity. The model achieved accuracy rates of 85% and 84% on the UCF101 and HACS datasets, respectively, as indicated in Tables 1 and 2. This demonstrates the model's effectiveness in identifying activities based on the nearest examples.
ANN: The second level of the hybrid model utilizes an ANN, which is recognized for its capability to model complex nonlinear relationships. By feeding the outputs of the SVM and k-NN into the ANN, the model can learn higher-order interactions between features and classes, thereby enhancing its overall predictive power. This two-step approach allows the ANN to refine the decision boundaries set by the SVM and k-NN, leading to an improved performance.
This study examined the efficacy of the proposed method by comparing a hybrid classifier with optimized ANN parameters using I-SGO with conventional classifiers, as well as the suggested hybrid models without feature selection (PWOFS) and without I-SGO optimization (PWOOPT). On the UCF101 dataset, PWOFS achieved accuracies of 90.4% and on the HACS dataset, 91%. For both datasets, PWOOPT achieved 90% accuracy. The combination of SVM, k-NN, and ANN in the proposed method enhances the stability, accuracy, and reliability of the model for HAR.
Incorporating feature selection and ANN fine-tuning, the Proposed Method achieved 95.9% accuracy on UCF101 and 94.9% on HACS, as shown in Tables 1 and 2. It outperformed previous classifiers, particularly in F-measure, indicating an optimal balance between precision and recall. The model also exhibited low FPR, FNR, and high MCC, accuracy, and specificity, effectively identifying true positives and negatives while minimizing false positives. These results suggest that the proposed hybrid classifier enhances HAR system reliability and reduces the impact of incorrect predictions, making it suitable for various applications.
4.3 Performance analysis of I-SGO algorithm
4.3.1 Size of features after optimal feature selection using I-SGO algorithm
After concatenating all proposed features, the total feature length per video signal was 2,080 pixels. We applied the I-SGO algorithm for feature selection as detailed in Algorithm 1. Table 3 lists the feature sizes after optimal selection for Datasets 1 and 2. The proposed I-SGO method achieved the highest accuracy, reaching 0.959 for Dataset 1 with 1,685 selected features and 0.949 for Dataset 2 with 1,699 selected features. This performance outperformed other methods, including Principal Component Analysis (PCA), SGO, SSO, SOA, SSOA, and DHOA. These results suggest that the proposed I-SGO method effectively identifies the most relevant features, leading to more accurate HAR predictions.
Table 3. Comparison of feature size and accuracy for different feature selection methods on Datasets 1 and 2
|
Method |
Database1 |
Database2 |
||
|
No. of Features Selected |
Acc. |
No. of Features Selected |
Acc. |
|
|
PCA |
950 |
0.85 |
970 |
0.835 |
|
SGO |
1724 |
0.931 |
1709 |
0.905 |
|
SSO |
1729 |
0.931 |
1696 |
0.895 |
|
SOA |
1723 |
0.935 |
1568 |
0.9 |
|
SSOA |
1702 |
0.937 |
1872 |
0.916 |
|
DHOA |
1424 |
0.939 |
1424 |
0.927 |
|
I-SGO |
1685 |
0.959 |
1699 |
0.949 |
4.3.2 Performance of the I-SGO algorithm to fine tune the proposed hybrid model
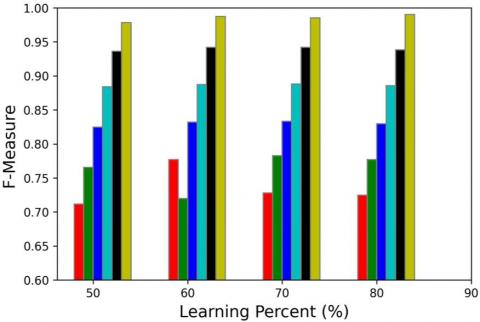
The proposed hybrid model was fine-tuned using the I-SGO algorithm outlined in Algorithm 2 and compared against SGO, SSO, SOA, and DHOA algorithms. Performance metrics included accuracy, sensitivity, specificity, precision, FPR, FNR, F-measure, MCC, and NPV, evaluated at 50%, 60%, 70%, and 80% learning percentages. Results for Datasets 1 and 2 are presented in Figures 3 and 4.
(a) Accuracy
(b) Sensitivity
(c) Specificity
(d) Precision
(e) FPR
(f) FNR
(g) F-Measure
(h) MCC
(i) NPV
Figure 3. Performance comparison of the proposed I-SGO algorithm with hybrid classifier against SGO, SSO, SOA, SSOA, and DHOA algorithms with hybrid classifier on Dataset 1
(a) Accuracy
(b) Sensitivity
(c) Specificity
(d) Precision
(e) FPR
(f) FNR
(g) F-Measure
(h) MCC
(i) NPV
Figure 4. Performance comparison of the proposed I-SGO algorithm with hybrid classifier against SGO, SSO, SOA, SSOA, and DHOA algorithms with hybrid classifier on Dataset 2
Dataset 1: The accuracy of the proposed method is 95.9% at 80 learning percentage. It also had a higher accuracy than the SGO, SSO, SOA, SSOA, and DHOA algorithms with the hybrid classifier, by 3.35%, 3.34%, 2.93%, 2.74%, and 2.53%, respectively, at 80 training percentages. The proposed model also exhibited a higher sensitivity, specificity, and precision for all learning percentages. These metrics demonstrate that the proposed I-SGO with a hybrid classifier can accurately identify positive and negative cases, avoid false predictions, and reduce the costs.
In addition, the proposed model exhibited the lowest FPR and FNR for all training percentages. At 80 training cycles, the FPR was 12.64%, which was lower than those of the SGO, SSO, SOA, SSOA, and DHOA algorithms by 4.34%, 4.30%, 2.55%, 1.74%, and 0.85%, respectively. The low FPR and FNR values indicated that the proposed hybrid classifier could distinguish between positive and negative cases and reduce the cost of false predictions.
Dataset 2: The proposed method outperformed SGO, SSO, SOA, SSOA, and DHOA in terms of accuracy, sensitivity, specificity, and precision at learning percentages of 50, 60, 70, and 80. As shown in Figure 4, it achieved the highest accuracy of 94.9% at 80% learning, exceeding the other algorithms by 5.67%, 5.69%, 4.62%, 3.47%, and 2.32%, respectively. It also had lower FPR and FNR, along with higher MCC, F-measure, and NPV.
The proposed hybrid classifier demonstrated high MCC, NPV, and F-measure values, reflecting its accuracy and reliability. This led to a high number of true positive and negative predictions and a low number of false predictions, including correctly identifying a large proportion of negative cases. The model also achieved a good balance between precision and recall, ensuring that most positive cases were accurately identified.
4.3.3 Convergence analysis of I-SGO algorithm
In this study, the I-SGO method was employed to fine-tune the ANN weights and minimize the error in human activity detection. The I-SGO method updates positions based on the global best and worst solutions, aiming to minimize the error function described in Eq. (4). Convergence analysis was performed to assess the algorithm's ability to reach the optimal solution efficiently. The performance of the I-SGO was compared with SGO, SSO, SOA, SSOA, and DHOA optimization methods on Datasets 1 and 2, as shown in Figures 5 and 6. Notably, the I-SGO method achieved the lowest cost function at just 20 iterations for both datasets.
Figure 5. Convergence comparison of the proposed I-SGO algorithm with other optimization algorithms for Dataset 1
Figure 6. Convergence comparison of the proposed I-SGO algorithm with other optimization algorithms for Dataset 2
4.3.4 Statistical performance analysis of I-SGO with hybrid classifier
This study evaluated the performance of the proposed hybrid classifier and other HAR classifiers by analyzing the best, worst, mean, median, and standard deviation of prediction error minimization. The results for Datasets 1 and 2 are shown in Tables 4 and 5.
Dataset 1: The proposed model achieved the lowest mean (0.038), median (0.036), and standard deviation (0.0075) of prediction error compared to SGO, SSO, SOA, SSOA, and DHOA with hybrid classifiers.
Dataset 2: The proposed method had the lowest mean (0.051), median (0.051), and standard deviation (0.001) of the error function compared to SGO, SSO, SOA, SSOA, and DHOA with hybrid classifiers.
The proposed hybrid classifier with the I-SGO algorithm consistently outperformed other classifiers in accuracy and consistency across both datasets. It had the lowest mean and median prediction errors and minimal variability, as indicated by the low standard deviation. These results demonstrate that the I-SGO-based hybrid model offers a robust and reliable approach for HAR.
Table 4. Statistical performance comparison of the proposed hybrid model with the I-SGO algorithm and the proposed hybrid classifier with SGO, SSO, SOA, SSOA, and DHOA optimization algorithms on Dataset 1
|
Approaches |
BEST |
WORST |
MEAN |
MEDIAN |
Standard Deviation |
|
SGO + Hybrid Classifier |
0.059 |
0.062 |
0.061 |
0.061 |
0.0014 |
|
SSO + Hybrid Classifier |
0.059 |
0.063 |
0.062 |
0.063 |
0.0017 |
|
SOA + Hybrid Classifier |
0.055 |
0.058 |
0.057 |
0.057 |
0.0014 |
|
SSOA + Hybrid Classifier |
0.053 |
0.057 |
0.055 |
0.055 |
0.0015 |
|
DHOA + Hybrid Classifier |
0.051 |
0.055 |
0.053 |
0.053 |
0.0014 |
|
I-SGO + Hybrid Classifier |
0.03 |
0.049 |
0.038 |
0.036 |
0.0075 |
Table 5. Statistical performance comparison of the proposed hybrid model with the I-SGO algorithm and the proposed hybrid classifier with SGO, SSO, SOA, SSOA, and DHOA optimization algorithms on Dataset 2
|
Approaches |
BEST |
WORST |
MEAN |
MEDIAN |
Standard Deviation |
|
SGO + Hybrid Classifier |
0.095 |
0.108 |
0.103 |
0.105 |
0.0045 |
|
SSO + Hybrid Classifier |
0.093 |
0.106 |
0.098 |
0.096 |
0.0049 |
|
SOA + Hybrid Classifier |
0.083 |
0.085 |
0.084 |
0.084 |
0.00067 |
|
SSOA + Hybrid Classifier |
0.072 |
0.073 |
0.073 |
0.073 |
0.00033 |
|
DHOA + Hybrid Classifier |
0.062 |
0.063 |
0.062 |
0.062 |
0.00048 |
|
I-SGO + Hybrid Classifier |
0.05 |
0.053 |
0.051 |
0.051 |
0.001004 |
4.3.5 Novelty and contribution of the I-SGO
I-SGO introduces novel enhancements to traditional SGO algorithm, specifically for optimizing feature selection and fine-tuning ANN weights in the hybrid classifier for HAR. The novelty and contributions of I-SGO are highlighted by the results presented in Tables 3-5.
Enhanced feature selection capabilities
Table 3 illustrates the performance of various feature selection methods for Datasets 1 and 2. The proposed I-SGO method, as detailed in Algorithm 1, achieved the highest accuracy across both datasets. Specifically, I-SGO selected 1,685 features (81% of the original 2,080) for Dataset 1 with an accuracy of 95.9%, and 1,699 features (82% of the original set) for Dataset 2 with an accuracy of 94.9%. In comparison, other methods like PCA selected fewer features but with lower accuracies: 950 and 970 features for Datasets 1 and 2, respectively, yielding accuracies of 85.0% and 83.5%. SGO, SSO, and SOA also selected more features but did not match I-SGO’s accuracy. DHOA, selecting the fewest features (1,424 for both datasets), achieved accuracies of 93.9% and 92.7%, still lower than I-SGO’s performance. These results highlight I-SGO’s efficiency in reducing the feature set while significantly improving classification accuracy, demonstrating its effectiveness in HAR.
Superior fine-tuning of hybrid classifier
Performance across metrics: When integrated with the hybrid classifier, I-SGO demonstrated superior performance compared to other optimization algorithms, including SGO, SSO, SOA, SSOA, and DHOA. For instance, with 80% training on Dataset 1, I-SGO achieved the highest accuracy of 95.9%, surpassing those of SGO, SSO, SOA, SSOA, and DHOA by 3.35%, 3.34%, 2.93%, 2.74%, and 2.53%, respectively. In Dataset 2, I-SGO yielded the best accuracy of 94.9% at 80% training, outperforming SGO, SSO, SOA, SSOA, and DHOA by 5.67%, 5.69%, 4.62%, 3.47%, and 2.32%, respectively. These results highlight the exceptional capability of I-SGO to fine-tune the hybrid model to achieve better generalization and overall accuracy. These results, fine-tuned using Algorithm 2, suggest that I-SGO effectively enhances the generalization and accuracy of the hybrid model.
Sensitivity and specificity: Sensitivity ensures the model accurately detects true positive cases, which is crucial for reliable activity detection. Specificity ensures the model correctly identifies negative cases, minimizing false positives. Together, high sensitivity and specificity enhance the model's accuracy and reliability in HAR applications. The proposed hybrid model fine-tuned by I-SGO demonstrated higher sensitivity and specificity across all learning percentages, effectively distinguishing between positive and negative cases. For instance, at 80% training, the FPR was reduced to 12.64%, 4.34% lower than SGO, highlighting I-SGO’s effectiveness in reducing false positives.
Improved convergence and error minimization
Convergence speed: According to the convergence analysis, I-SGO had the lowest cost function after 20 iterations for both datasets. This implies that it achieved the best answer faster than the other methods. For real-time uses, such as HAR, this shows how well the algorithm works to find optimal or nearly optimal solutions more quickly.
Error minimization: I-SGO demonstrated significant performance in minimizing prediction errors across both datasets. For Dataset 1, I-SGO with the hybrid classifier achieved the lowest mean prediction error of 0.038, despite a higher standard deviation of 0.0075, compared to methods like SGO, which had a mean error of 0.061 and a standard deviation of 0.0014. This indicates that I-SGO not only provides higher accuracy but also delivers more consistent predictions. The best prediction error was 0.030 and the worst was 0.049, underscoring I-SGO’s ability to reduce prediction errors and enhance accuracy. Although the higher standard deviation may be due to I-SGO’s broader optimization scope, it is offset by the substantial reduction in mean error. For Dataset 2, I-SGO achieved a mean prediction error of 0.051 with a standard deviation of 0.0010, outperforming other methods. The best prediction error was 0.050 and the worst was 0.053, reflecting significant error reduction and improved accuracy. The higher standard deviation might be attributed to I-SGO’s extensive optimization, but this variability is outweighed by the notable enhancement in mean error and accuracy. This balance between accuracy and variability highlights the robustness and effectiveness of I-SGO in advancing HAR systems.
Adaptive search mechanism
The I-SGO algorithm features an adaptive search mechanism that dynamically adjusts parameters based on the fitness landscape, unlike static methods. By updating seagull positions through individual and collective fitness evaluations, as outlined in Eq. (15), and adjusting parameters W and W′ according to the best and worst solutions, I-SGO enhances search space exploration. This adaptability allows I-SGO to effectively navigate complex optimization problems, improving feature selection, fine-tuning, and ultimately boosting the accuracy of human activity recognition systems.
Consistency across datasets
The I-SGO showed notable consistency in performance across both datasets. For Dataset 1, I-SGO achieved the lowest mean prediction error of 0.038, despite a higher standard deviation of 0.0075 compared with the other methods. The best prediction error of 0.030 and worst of 0.049 demonstrated its effectiveness in minimizing prediction errors and enhancing accuracy. Although the standard deviation was higher, it was compensated by a substantial reduction in the mean error, indicating robust performance.
In Dataset 2, I-SGO achieved a mean prediction error of 0.051 and a standard deviation of 0.0010, outperforming the performance of other methods. The best prediction error was 0.050 and the worst was 0.053. Despite the higher standard deviation compared to some methods, the reduction in the mean error and consistent accuracy improvements highlight the effectiveness and reliability of I-SGO. This balance of accuracy and variability, even with a greater standard deviation, confirms the robustness of I-SGO and its value as a robust tool for advancing HAR systems.
Balanced performance
F-Measure, MCC, and NPV: The hybrid classifier fine-tuned with I-SGO consistently achieved higher F-measure, MCC, and NPV values across both datasets. The F-measure and MCC demonstrate the balance between precision and recall, as well as the correlation between predicted and actual classifications. This highlights the capacity of I-SGO to optimize the hybrid model for accuracy and dependability.
Lower variability: The lower standard deviation in prediction errors demonstrates that I-SGO produces more stable and reliable outcomes, reducing the risk of erratic model behavior under different conditions.
I-SGO gives a significant advancement over traditional optimization methods by effectively performing feature selection, error minimization, and model fine-tuning. Its novelty lies in its ability to consistently achieve higher accuracy, sensitivity, and specificity and lower error rates across different datasets. This makes I-SGO particularly valuable for applications in human activity recognition, where accurate and reliable classification is crucial. These results strongly justify the adoption of I-SGO as an effective optimization technique in scenarios that require precise and consistent model performance.
This paper introduces a machine learning-based HAR system designed to optimize classification performance through three key stages. In the pre-processing and feature extraction phase, raw data are transformed into frames, followed by Gaussian filtering and background subtraction to segregate the foreground and background objects. Relevant texture-based spatiotemporal features were extracted from the preprocessed data. To address the potential limitations of video data, particularly the high dimensionality of discriminative features related to the finer details and surface properties of objects in human activities, we employed feature selection and optimization methods. The optimal features were selected using the I-SGO approach. For human activity classification, we propose a hybrid machine-learning model that integrates an SVM, k-NN, and an optimized ANN. The ANN weights were fine-tuned using the I-SGO approach to enhance classification accuracy. The experimental results highlight the system's efficacy, demonstrating high accuracy, sensitivity, specificity, and F-measure with low FPR and FNR on the UCF-101 and HACS datasets. The proposed feature selection and optimization techniques show promise for further refinement. Future research may explore alternative machine learning models or optimization techniques to improve classification accuracy, emphasizing the effectiveness of the proposed three-stage approach in achieving enhanced system performance.
[1] Khan, Z.A., Sohn, W. (2011). Abnormal human activity recognition system based on R-transform and kernel discriminant technique for elderly home care. IEEE Transactions on Consumer Electronics, 57(4): 1843-1850. https://doi.org/10.1109/TCE.2011.6131162
[2] Chen, Y., Yu, L., Ota, K., Dong, M. (2018). Robust activity recognition for aging society. IEEE Journal of Biomedical and Health Informatics, 22(6): 1754-1764. https://doi.org/10.1109/JBHI.2018.2819182
[3] Viard, K., Fanti, M.P., Faraut, G., Lesage, J.J. (2020). Human activity discovery and recognition using probabilistic finite-state automata. IEEE Transactions on Automation Science and Engineering, 17(4): 2085-2096. https://doi.org/10.1109/TASE.2020.2989226
[4] Ye, J., Qi, G.J., Zhuang, N., Hu, H., Hua, K.A. (2018). Learning compact features for human activity recognition via probabilistic first-take-all. IEEE Transactions on Pattern Analysis and Machine Intelligence, 42(1): 126-139. https://doi.org/10.1109/TPAMI.2018.2874455
[5] Hsu, Y.L., Yang, S.C., Chang, H.C., Lai, H.C. (2018). Human daily and sport activity recognition using a wearable inertial sensor network. IEEE Access, 6: 31715-31728. https://doi.org/10.1109/ACCESS.2018.2839766
[6] Mliki, H., Bouhlel, F., Hammami, M. (2020). Human activity recognition from UAV-captured video sequences. Pattern Recognition, 100: 107140. https://doi.org/10.1016/j.patcog.2019.107140
[7] Shao, Z., Wang, J., Lu, T., Zhang, R., Huang, X., Lv, X. (2021). Internal and external spatial–temporal constraints for person reidentification. Journal of Visual Communication and Image Representation, 80: 103302. https://doi.org/10.1016/j.jvcir.2021.103302
[8] Beddiar, D.R., Oussalah, M., Nini, B. (2022). Fall detection using body geometry and human pose estimation in video sequences. Journal of Visual Communication and Image Representation, 82: 103407. https://doi.org/10.1016/j.jvcir.2021.103407
[9] Li, J., Hu, Q., Guo, T., Wang, S., Shen, Y. (2021). What and how well you exercised? An efficient analysis framework for fitness actions. Journal of Visual Communication and Image Representation, 80: 103304. https://doi.org/10.1016/j.jvcir.2021.103304
[10] Zia Uddin, M., Lee, J.J., Kim, T.S. (2010). Independent shape component-based human activity recognition via Hidden Markov Model. Applied Intelligence, 33: 193-206. https://doi.org/10.1007/s10489-008-0159-2
[11] Singh, R., Kushwaha, A.K.S., Srivastava, R. (2019). Multi-view recognition system for human activity based on multiple features for video surveillance system. Multimedia Tools and Applications, 78: 17165-17196. https://doi.org/10.1007/s11042-018-7108-9
[12] Kamal, S., Jalal, A. (2016). A hybrid feature extraction approach for human detection, tracking and activity recognition using depth sensors. Arabian Journal for Science and Engineering, 41: 1043-1051. https://doi.org/10.1007/s13369-015-1955-8
[13] Rahman, S., See, J., Ho, C.C. (2017). Exploiting textures for better action recognition in low-quality videos. EURASIP Journal on Image and Video Processing, 2017: 74. https://doi.org/10.1186/s13640-017-0221-2
[14] Luo, J., Wang, W., Qi, H. (2014). Spatio-temporal feature extraction and representation for RGB-D human action recognition. Pattern Recognition Letters, 50: 139-148. https://doi.org/10.1016/j.patrec.2014.03.024
[15] Kellokumpu, V., Zhao, G., Pietikäinen, M. (2008). Human activity recognition using a dynamic texture based method. In BMVC.
[16] Siddiqi, M.H., Alsirhani, A. (2022). An efficient feature selection method for video-based activity recognition systems. Mathematical Problems in Engineering, 2022(1): 5486004. https://doi.org/10.1155/2022/5486004
[17] Basak, H., Kundu, R., Singh, P.K., Ijaz, M.F., Woźniak, M., Sarkar, R. (2022). A union of deep learning and swarm-based optimization for 3D human action recognition. Scientific Reports, 12(1): 5494. https://doi.org/10.1038/s41598-022-09293-8
[18] Yusta, S.C. (2009). Different metaheuristic strategies to solve the feature selection problem. Pattern Recognition Letters, 30(5): 525-534. https://doi.org/10.1016/j.patrec.2008.11.012
[19] Yousefpour, A., Ibrahim, R., Hamed, H.N.A., Yokoi, T. (2016). Integrated feature selection methods using metaheuristic algorithms for sentiment analysis. In Intelligent Information and Database Systems: 8th Asian Conference, ACIIDS 2016, Da Nang, Vietnam, pp. 129-140. https://doi.org/10.1007/978-3-662-49381-6_13
[20] Abbaspour, S., Fotouhi, F., Sedaghatbaf, A., Fotouhi, H., Vahabi, M., Linden, M. (2020). A comparative analysis of hybrid deep learning models for human activity recognition. Sensors, 20(19): 5707. https://doi.org/10.3390/s20195707
[21] Subramanian, R.R., Vasudevan, V. (2021). A deep genetic algorithm for human activity recognition leveraging fog computing frameworks. Journal of Visual Communication and Image Representation, 77: 103132. https://doi.org/10.1016/j.jvcir.2021.103132
[22] Arshad, M., Jaskani, F.H., Sabri, M.A., Ashraf, F., Farhan, M., Sadiq, M., Raza, H. (2021). Hybrid machine learning techniques to detect real time human activity using UCI dataset. EAI Endorsed Transactions on Internet of Things, 7(26): e1. https://doi.org/10.4108/eai.26-5-2021.170006
[23] Vishwakarma, D.K., Kapoor, R. (2015). Hybrid classifier based human activity recognition using the silhouette and cells. Expert Systems with Applications, 42(20): 6957-6965. https://doi.org/10.1016/j.eswa.2015.04.039
[24] Shuvo, M.M.H., Ahmed, N., Nouduri, K., Palaniappan, K. (2020). A hybrid approach for human activity recognition with support vector machine and 1D convolutional neural network. In 2020 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington DC, USA, pp. 1-5. https://doi.org/10.1109/AIPR50011.2020.9425332.
[25] Sinha, K.P., Kumar, P. (2022). Hybrid classification with score level fusion for human activity recognition. http://doi.org/10.2139/ssrn.4111254
[26] Mim, T.R., Amatullah, M., Afreen, S., Yousuf, M.A., et al. (2023). GRU-INC: An inception-attention based approach using GRU for human activity recognition. Expert Systems with Applications, 216: 119419. https://doi.org/10.1016/j.eswa.2022.119419
[27] Yin, X., Liu, Z., Liu, D., Ren, X. (2022). A novel CNN-based Bi-LSTM parallel model with attention mechanism for human activity recognition with noisy data. Scientific Reports, 12(1): 7878. https://doi.org/10.1038/s41598-022-11880-8
[28] Luo, J. (2014). Feature extraction and recognition for human action recognition. PhD thesis, University of Tennessee.
[29] Febin, I.P., Jayasree, K., Joy, P.T. (2020). Violence detection in videos for an intelligent surveillance system using MoBSIFT and movement filtering algorithm. Pattern Analysis and Applications, 23(2): 611-623. https://doi.org/10.1007/s10044-019-00821-3
[30] Niu, M., Mao, X., Liang, J., Niu, B. (2013). Object tracking based on extended surf and particle filter. In Intelligent Computing Theories and Technology: 9th International Conference, ICIC 2013, Nanning, China, pp. 649-657. https://doi.org/10.1007/978-3-642-39482-9_75
[31] Kamble, M.V., Bichkar, R. (2023). Advancements in human activity recognition: Novel shape index local ternary pattern and hybrid classifier model for enhanced video data analysis. International Journal of Intelligent Systems and Applications in Engineering, 12(2): 175-183. https://ijisae.org/index.php/IJISAE/article/view/4240.
[32] Xu, L., Mo, Y., Lu, Y., Li, J. (2021). Impro seagull optimization algorithm combined with an unequal division method to solve dynamic optimization problems. Processes, 9(6): 1037. https://doi.org/10.3390/pr9061037
[33] Nemati, R.J., Javed, M.Y. (2008). Fingerprint verification using filter-bank of Gabor and Log Gabor filters. In 2008 15th International Conference on Systems, Signals and Image Processing, Bratislava, Slovakia, pp. 363-366. https://doi.org/10.1109/IWSSIP.2008.4604442
[34] Yang, Y., Wang, J., Yang, Y. (2012). Improving SVM classifier with prior knowledge in microcalcification detection1. In 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, pp. 2837-2840. https://doi.org/10.1109/ICIP.2012.6467490
[35] Song, X., Xie, T., Fischer, S. (2019). A memory-access-efficient adaptive implementation of kNN on FPGA through HLS. In 2019 IEEE 37th International Conference on Computer Design (ICCD), Abu Dhabi, United Arab Emirates, pp. 177-180. https://doi.org/10.1109/ICCD46524.2019.00030
[36] Kwon, M.C., Choi, S. (2018). Recognition of daily human activity using an artificial neural network and smartwatch. Wireless Communications and Mobile Computing, 2018(1): 2618045. https://doi.org/10.1155/2018/2618045
[37] Adamu, A., Abdullahi, M., Junaidu, S.B., Hassan, I.H. (2021). An hybrid particle swarm optimization with crow search algorithm for feature selection. Machine Learning with Applications, 6: 100108. https://doi.org/10.1016/j.mlwa.2021.100108
[38] Hosseini, Z., Jafarian, A. (2016). A hybrid algorithm based on invasive weed optimization and particle swarm optimization for global optimization. International Journal of Advanced Computer Science and Applications, 7(10): 295-303. https://doi.org/10.14569/IJACSA.2016.071040
[39] Abuzanouneh, K.I.M. (2018). Hybrid algorithm for enhancing and increasing image compression based on image processing techniques. International Journal of Computer Science and Information Security, 16(3): 90-98.
[40] Liu, J., Shi, Q., Han, R., Yang, J. (2021). A hybrid GA-PSO-CNN model for ultra-short-term wind power forecasting. Energies, 14(20): 6500. https://doi.org/10.3390/en14206500
[41] Sayed, G.I., Hassanien, A.E. (2018). A hybrid SA-MFO algorithm for function optimization and engineering design problems. Complex & Intelligent Systems, 4: 195-212. https://doi.org/10.1007/s40747-018-0066-z
[42] Silarbi, S., Tlemsani, R., Bendahmane, A. (2021). Hybrid PSO-ANFIS for speaker recognition. International Journal of Cognitive Informatics and Natural Intelligence, 15(2): 83-96. https://doi.org/10.4018/IJCINI.20210401.oa7
[43] Dhiman, G., Kumar, V. (2019). Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowledge-based Systems, 165: 169-196. https://doi.org/10.1016/j.knosys.2018.11.024
[44] Soomro, K., Zamir, A.R.Shah, M. (2012). UCF101: A dataset of 101 human actions classes from videos in the wild. arXiv preprint arXiv:1212.0402. https://doi.org/10.48550/arXiv.1212.0402
[45] Zhao, H., Torralba, A., Torresani, L., Yan, Z. (2019). HACS: Human action clips and segments dataset for recognition and temporal localization. In 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea (South), pp. 8667-8677. https://doi.org/10.1109/ICCV.2019.00876
[46] Luque-Chang, A., Cuevas, E., Fausto, F., Zaldívar, D., Pérez, M. (2018). Social spider optimization algorithm: Modifications, applications, and perspectives. Mathematical Problems in Engineering, 2018(1): 6843923. https://doi.org/10.1155/2018/6843923
[47] Kaur, A., Jain, S., Goel, S. (2020). Sandpiper optimization algorithm: A novel approach for solving real-life engineering problems. Applied Intelligence, 50(2): 582-619. https://doi.org/10.1007/s10489-019-01507-3
[48] Mohammad-Azari, S., Bozorg-Haddad, O., Chu, X. (2018). Shark smell optimization (SSO) algorithm. In Advanced Optimization by Nature-Inspired Algorithms, pp. 93-103. https://doi.org/10.1007/978-981-10-5221-7_10
[49] Brammya, G., Praveena, S., Ninu Preetha, N.S., Ramya, R., Rajakumar, B.R., Binu, D. (2019). Deer hunting optimization algorithm: A new nature-inspired meta-heuristic paradigm. The Computer Journal, bxy133. https://doi.org/10.1093/comjnl/bxy133