Arasakumaran Umamageswari*![]() | Sivapatham Deepa
| Sivapatham Deepa![]() | Faritha Banu Jahir Hussain
| Faritha Banu Jahir Hussain![]() | Padmapriya Shanmugam
| Padmapriya Shanmugam![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This paper proposes an entire strategy that involves pre-processing, augmentation, and noise reduction of submarine photos, which is followed by the identification of things that might seem suspicious. For feature extraction, the method combines the capabilities of DnCNN (Deep Convolutional Neural Network) to remove the noise by proper training, SURF (Speeded-Up Robust Features) to extract the features, and CLAHE (Contrast Limited Adaptive Histogram Equalisation) algorithm to enhance underwater images to identify the features properly. In addition to preliminary processing and de-noising, edge improvement, colour correction, and brightness modification are included into the approach. These improvements are meant to visually draw focus on dubious objects in pictures taken underwater. Extensive tests have been carried out on an assortment of underwater picture dataset comprising different settings and suspicious items in order to assess the efficacy of the suggested method. Analysis conducted in comparison with present techniques for object identification, pre-processing, and noise reduction. The outcomes were assessed using quantitative indicators of performance such PSNR, MSE and SSIM. The results of the experiment show that the combined strategy works better than the distinct techniques, producing higher detection rates of 62.02 in DnCNN and 52.02 in CLAHE by increasing the apparent size of suspicious objects and improving the general quality of underwater photos. It is a crucial sensor technology with numerous uses in the military, offshore technology, aquaculture, marine research and rescue, and other fields.
red compensation, DnCNN, gamma correction, CLAHE, white balancing, image sharpening, SURF
Applications such as monitoring the environment, undersea studies, and maritime security all rely heavily on undersea surveillance. Yet because of the peculiarities of the waters below, underwater imaging poses particular challenges. Underwater imagery is severely compromised by elements such light diminution, water turbidity, and scattering, making it challenging to accurately detect and identify questionable items. Traditional image processing methods and object recognition methods are rendered fewer effective by the additional factors of noise, lack of contrast, and poor visibility.
Researchers have looked at a number of ways to increase the quality of undersea photos and the identification of suspicious items so as to overcome these problems. Recently, de-noising techniques based on deep learning, such DnCNN (Deep Convolutional Neural Network), showed impressive results in reducing noise in pictures. DnCNN is a good option for de-noising pictures of water since it uses convolutional neural networks in order to efficiently acquire and reduce complex noise patterns.
Nevertheless, de-noising may not be enough on itself to provide undersea surveillance systems that the best detection accuracy. Preprocessing methods that deal with problems like low contrast and limited visibility may greatly improve underwater image quality, which in turn improves object recognition systems' efficiency. CLAHE is a popular preprocessing routine that automatically equalizes an image's distribution to enhance local characteristics and reduce the effects of uneven lighting.
Furthermore, object detection efficacy in underwater circumstances may be further enhanced via other picture enhancing methods. By enhancing the visual qualities and prominence of suspicious items, these techniques for color modification, contrast modification, and edge enhancement help make them stick out from the background.
This paper, offers a combined method for underwater picture preliminary processing, de-noising, and dubious item identification that integrates DnCNN with SURF, CLAHE, and image-enhancing approaches. This paper also tackle the issues of noise, poor visibility, and low contrast in undersea photographs by utilizing the capabilities of deep learning-driven denoizing, adjusting brightness by CLAHE, and strengthening visual characteristics.
Developing an useful technique to enhance the identification of questionable items in undersea surveillance systems is the main goal of this study. Our objective is to offer an effective remedy that may help to improve safety and situational consciousness in underwater situations by increasing the calibre of undersea photos and improving object visibility. In the long run, the research could enhance the precision and uniformity of suspicious item identification in challenging underwater environments, which can significantly develop underwater monitoring systems.
The suggested strategy is explained in detail in the subsequent sections: section 2 offers background information on the existing survey; section 3 outlines the suggested methodology; section 4 addresses the dataset; and section 5 ends with results and discussions, such as experimental setup and assessment metrics. The findings and conclusions are presented, comparing the efficacy of our combined strategy with alternate methods.
These associated works show the use of de-noising methods and deep neural networks in conjunction with an array of image enrichment methods, such as Retinex, dark channel, histogram equalization, fusion, and significant recognition, for the purpose of underwater picture denoising and suspicious object detection. These methods have the goal to increase contrast, improve visibility in images, and enhance object recognition algorithm performance in difficult undersea conditions. For the purpose of underwater imagine de-noising and suspicious item proof of identity, these linked works show that CLAHE based, DnCNN based denoising preliminary processing, and enhanced image approaches function together. Combining these methods improves quality of images and increases underwater detection of objects systems' efficiency.
A strategy for identifying objects and underwater picture noise reduction that combines deep learning methods with Retinex-based image improving techniques. After via the Retinex method to improve picture visibility, deep learning-powered recognition of objects is utilised to identify items which may be challenging. The findings show improved underwater scene object recognition ability [1]. A technique that combines deep convolutional network learning with dark channel prior-based picture augmentation for undersea denoising of images and recognising objects is proposed. For better picture visibility, the data transfer map of the scene has been calculated using the dark channel once. In the improved underwater pictures, object identification is carried out using DNN's [2]. A multi-scale fusion technique for object recognition and submerged picture enhancement is offered in a separate investigation. In order to boost visibility and improve the identification of dubious items, the method combines algorithms for object detection with imagine fusion methods. In order to improve local and global characteristics, multiple scales of picture patches combine, which improves the ability to detect under challenging underwater environments [3].
The authors offer a technique of identifying objects and underwater imagine enhancement which combines histogram equalisation with deep learning-driven noise reduction. Histogram equalising is used to improve contrary, and a DNN is developed to de-noise undersea photos. Following that, object identification algorithms are used to the improved photos in order to recognise potentially problematic things [4]. This paper presents a method for object recognition and undersea picture enhancement utilising techniques from deep learning with Adaptive Histogram Equalisation (AHE). After via AHE to boost contrast and brightness in the picture, deep learning-driven detection of objects is used to identify things that could be challenging. In difficulties requiring the detection of objects that are submerged, this method achieves better [5]. A hybrid strategy involving salient recognition of objects, picture augmentation, and noise reduction of pictures of water is proposed in a different paper. The methodology identifies salient items in pictures of water by combining saliency detection approaches with de-noising techniques. Once the pictures have been enhanced and de-noised, they are utilised for the detection of objects, which involves recognising suspicious items [6].
The study suggests an approach that combines CLAHE for contrast enhancement and DnCNN with SURF for undersea picture denoising. To find suspect things in the improved pictures, they also use object detection instruments. Comparing outcomes to more traditional methods, the detection of objects performance improves [7]. The images are denoised with DnCNN, and then the contrast is improved using CLAHE. The suggested strategy substantially enhances the accuracy of recognising objects and the quality of images [8]. Through the use of CLAHE preprocessing and DnCNN-based imagine restoration, the work aims at enhancing underwater product detection. The pictures are denoised with the DnCNN method, and contrast is improved using CLAHE. In compared to traditional methods, the results of the experiment show enhanced object identifying performance [9]. The technique mixes histogram equalisation and DnCNN for identifying objects and underwater imagine enhancement. The level of contrast has been enhanced by histogram adjustment, and noise is minimised employing DnCNN with SUFR for feature extraction. The combined approach efficiently recovers the visibility of underwater images and increases the revealing of mistrustful objects [10].
The use of DnCNN and the CLAHE with SURF for submarine picture denoising is looked into in this paper. For the reason of removing noise while improving the quality of images, the researchers train a deep CNN framework specifically for submarine images. The denoised images may be further improved for object detection using CLAHE or additional image enrichment methods, even though this isn't employed right away in this study [11]. The authors suggest a combined system for analyzing underwater images that includes object detection algorithms, CLAHE for enhancing contrast, and DnCNN-based de-noising. By improving the appearance of underwater pictures using de-noising and color enhancement approaches, the strategy enhances item detection performance [11]. A strategy utilizing both noise reduction and haze removal approaches for submerged image restoration. The authors use a median filter that adapts for noise reduction and a dark channel prior for haze removal. The repaired photos are next submitted to the proper algorithms for identifying of objects of suspicion [12, 13].
This article recommends a technique for object detection and enhance the underwater images which combines CNNs with AHE. CNNs are used for recognizing objects tasks, such as detecting suspicious items, whereas AHE is used to enhance the brightness of underwater photos [14]. The researchers offer a method for object detection and image enhancement in water that combines correction of colors and saliency recognition. Saliency detection techniques are used for recognizing potentially suspect objects, and color improvement approaches are utilized to fine-tune for color aberrations in underwater photos. The identified salient things are subsequently recognized by applying detection methods [15]. The research suggests employing the wavelet transform together with deep learning to enhance and denoise images taken underwater. Suspicious item identification tasks are afterwards carried out utilizing enhanced and denoised images [16]. The authors offer an approach for undersea item detection which integrates image improving methods with noise mitigation methods. Methods for enhancing images like improved contrast or adaptive equalization are used to improve image quality, while blurring methods wavelet-based denoising is carried out to decrease noise. After that, the enhanced photos are processed for recognizing items, including possibly hazardous ones [17, 18].
These associated works show how to use algorithms for object detection in conjunction with haze elimination, contrast stretches, color correction, noise mitigation, and deep learning to improve and denoize images taken underwater for the goal of detecting objects of suspicion [11, 19]. The study explores the use of a generative adversarial network (GAN) for denoising low-dose CT images. Specifically, it incorporates Wasserstein distance and perceptual loss within the GAN framework to improve the quality of denoised images [20]. Underwater environments with greater precision and also these methods can be very useful to work with data sets in the development and evaluation of algorithms for the identification of underwater objects [21, 22]. Existing methods have a number of drawbacks especially when it pertains to underwater picture denoising [23]. These involve a lack of training information, the complex nature of underwater scenes, a lack of ground truth data, and the inability of CNNs trained in static datasets to adjust to these changing circumstances, thereby decreasing their value in practical applications [24, 25]. To get around these limitations, methods like learning by transfer, enhancing data, or the creation in custom frameworks made to meet the limitations of underwater image blurring with DnCNN and CLAHE can be used [26, 27].
The whole structure of the suggested method is shown in Figure 1. The DnCNN method is utilized to first increase the input images, and the CLAHE technique follows in order to further enhance it.
Figure 1. Framework for the proposed method
3.1 Image de-noising using DnCNN
Deep learning systems like DnCNN are often used for picture noise reduction jobs. While it may be utilised to improve submerged photos, detection or classification techniques are additionally required for the recognition of problematic objects. A summary of a potential method that combines object recognition with DnCNN image enhancement is provided below:
Input: The input undersea picture is delimited by Image∈ R^(X×Y).
1: Preparation
•If required, transform picture I to grayscale: ConvertToGrayscale(I) = I_gray.
• Normalize the I_gray pixels with values among 0 and 1: Norm(I_gray) => I_norm.
2: Model
• The structure of the DnCNN: Use DefineDnCNNArchitecture() to get DnCNN.
• If available, load the trained model the weights: Dn_CNN.loadweights('pre-trained_weights.')
3: Denoising
• Run the normalised underwater picture using model: DnCNN = O_norm(I_norm).
• To obtain a better picture output: O is equal to Rescale(O_norm).
4: The post-production phase
• Adjust O's values for pixels again to starting range from O_re-scaled equals Rescale(O).
• Carry down any more further processing actions that might be necessary, such as altering the level of brightness, contrast, or colour balance.
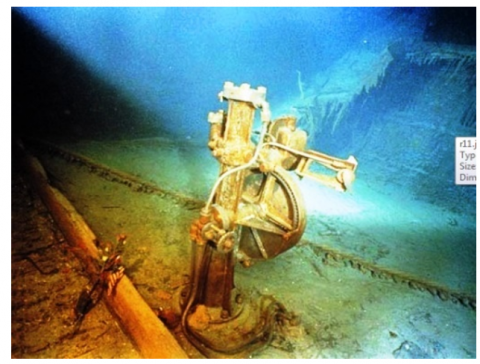
The input picture appears in Figure 2 (Left), and the better version produced by the DnCNN approach is shown in Figure 2 (Right).
Figure 2. (Left) Original image (Right) Enhanced image using DnCNN algorithm
3.2 Image enhancement using CLAHE
To enhance an image, CLAHE algorithm is a commonly employed method. This is the formula for the underwater enhancement of images method, CLAHE.
Input: Let Image ∈ R^(X×Y) represent the input underwater image.
1: Preparation
• If needed, convert picture I to grey scale: ConvertToGrayscale(I) = I_gray.
• Establish uniform the I_gray pixels with values among 0 and 1: Norm (I_gray) => Ignore.
2: Algorithm
2.1 Set the parameters:
• Size of window: N×N
• Histogram adjustment bin count: A
• Maximum clip length: B
2.2 Split the I_norm acceptable picture into N×N not overlapping chunks.
• In each block B_i
• For a block B_i, calculate the graph H_i with B bins.
Apply clipping limit of C plus histogram equalization to H_i.
• From the balanced histogram, get the function of cumulative distribution (CDF_i).
The CDF_i can be utilised to alter the pixel values in block B_i.
2.3 To create the resultant enhanced picture O_norm, sew the enhanced squares together.
3: Post-processing
Re-scale each pixel values of O_norm to original range: O_re-scaled = Re-scale(O_norm).
To express space of actual values matrices of size M×N, use the notation ℝ^(M×N) above. The function ConvertToGrayscale() turns the supplied imagine to grayscale. Rescale() is an algorithm that moves the values of the pixels to the suitable range, and Normalise() is a method that restores the pixel values from 0 to 1. Figure 3 displays the improved image from CLAHE.
Figure 3. CLAHE enhanced image
3.3 Image enhancement through red compensation
Red adjustment is a method used in enhancement of images that aims to fix the colour distortion caused on by absorption of water, thus enhancing underwater image accessibility and quality. Figure 4 shows the red compensated image. The method's general outline is as the following:
Figure 4. Red compensated image
Input: Let Image ∈ R^(X×Y×3) specifies the input undersea image in color format.
1: Preparation
·Change the image I to an alternate colour space, like XYZ or a laboratory, which is suitable for red correction.
2: Red correction through compensation
·Take the red channels off of the representation of the colour field.
·For bettering the red way, use a technique or red paying function.
·Merge the red channel which has been strengthened with the remaining colour systems.
3.4 Enhancement through white balancing
In picture improvement, white balance was a method employed to rectify colour casts produced on by varying lighting circumstances. The objective is to make the picture look genuine by modifying its colour balance so it accurately reflects the white point. A summary of the white balancing method is given as follows:
Input: Let Image ∈ R^(X×Y×3) depict the image that was input portray the input picture within the RGB colour spectrum inside the red, green, and blue colour space.
1: Preliminary preprocessing
·Change the image’s picture I to a RGB space like XYZ or LAB which can be utilised for white balance.
2: Determining white aspects
·under the picture, pick a pixel or pixels that, under the specific lighting situations, ought to be white or grey
·To determine the white point, calculate the average colour value of the chosen area or pixels or pixel.
3: Balanced whiteness alteration
·Determine the amount of colour channels gains required to make the image fair.
·By apportioning the predicted point amounts by true white values, these enhancements may be obtained
·To correct the white equilibrium, apply colored channel gain to the image’s colour streams.
The white balance output is seen in the Figure 5 after red compensatory image. It's mandatory to keep in mind that not all images will require or benefit from a white equilibrium, since many may deliberately have a specific colour cast for creative or artistic reasons. According to the unique needs and features of the picture gathering, the white balancing technique should be adjusted and improved. Depending on how the white rebalancing algorithm is precisely carried out, there may be a number of methods for calculating the white point, include applying mathematical methods to determine the white points from the image or from an established standard white.
Figure 5. White balanced image
3.5 Gamma correction for enhancement
Using a kind of power-law change, gamma restoration is a frequently employed method for the enhancement of images for improving an image's luminance and contrasts. It can be utilised to improve the clarity of images taken underwater. The method's general structure is as outlined below:
Input: Let Image ∈ R^(X×Y) specifies the input image.
1: Preliminary Processing
·I_norm = Normalize(I) is the pre-processing step that normalises the pixel values of I among 0 and 1.
2. Gamma Correction:
·Provide a gamma number (γ) that establishes the correction's power. Values usually range between 0.5 and 2.0
·To the normalized picture I_norm, perform the gamma adjustment transformation O_norm = I_norm ^ (1/γ).
3. Post-processing
·Rescale O_norm's pixels to the original range of Rescale(O_norm) = O_rescaled.
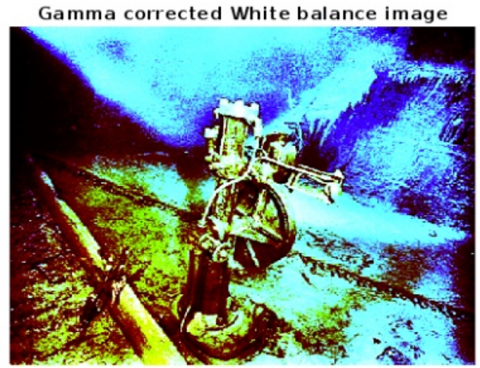
Figure 6 depicts gamma corrected and sharpen image.
(a)
(b)
Figure 6. (a) Gamma corrected image (b) Sharpen image
3.6 SURF algorithm for feature extraction
A method for obtaining characteristics in computer vision issues is the SURF algorithm. Initially it is proposed as a better method than the SIFT technique [26]. SURF is intended to be as highly computational as possible without compromising its ability to adjust to affine modifications, rotation, and scale changes. This is an outline of the SURF method's hypothesis:
Input: Let Image ∈ R^(X×Y) specifies the input image.
Algorithm:
1. Compute the wavelet Haar responses for every key point in a rectangular area.
2. Using a layout or pattern, construct an explanation vector depending on the replies.
3. For endurance to changes, you can also carry out additional procedures or description standardisation.
4. The key locations along with the descriptors that have been extracted are the result of the extraction.
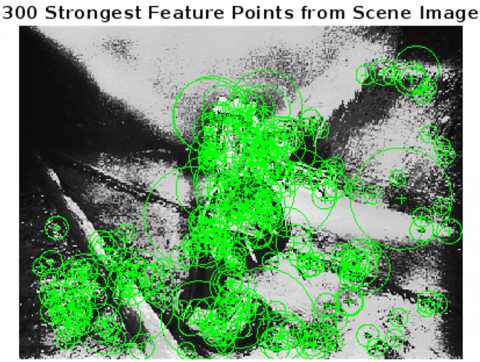
Figure 7 shows the output of SURF algorithm using feature extraction.
Figure 7. Feature extraction using SURF
3.7 Object detection through point feature matching algorithm
Finding connections between features obtained from a picture being used and characteristics of an example or template image is the method of identifying objects using matching feature algorithms. The algorithm's general structure is as the following:
Input: Let Image ∈ R^(X×Y) specifies the input undersea image in gray format.
1: Matching Feature
·Apply the same feature acquisition technique that was used for obtaining features from the starting point picture to the image being used I.
·Use matching of features for contrasting the supplied image's key point descriptions with the default image's key point descriptions.
·To find connections between the key points, use an alignment technique like the Randomised Sample Consensus (RANSAC) method and the Nearest Neighbour Lookup methodology.
2: Verification and Filtering
·Use different filtering methods to eliminate abnormalities and improve calibre of results. The RANSAC technique, for example, may be utilized to eliminate incompatibilities based on the anticipated conversion model and predict the shape transformation of the template and source pictures.
·Define an upper limit or use statistical methods to assess if there have been sufficient confirmed matching for the object to have been considered discovered.
3: Object Detection
Using the identical key points, identify object's location and its position in provided picture after connections have been established and verified. Applying geometrical modifications like affine or homography transforms may accomplish this.
4: Output
The Region of interest (ROI) or boundaries indicating where the determined item appears in the image that was input can be included in the final result.
It's most important to keep in mind that according to the specifications of the object recognition job and the collection of libraries or framework that are accessible, the exact implementation details along with the choice of extraction and matching techniques could shift. To deal with size differences in the product, extra techniques like multi-scale match and scaled analysis of space may be employed.
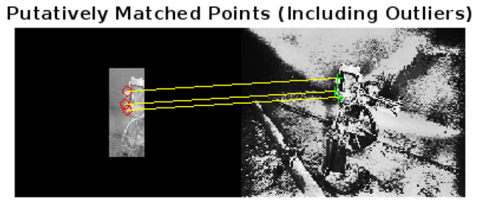
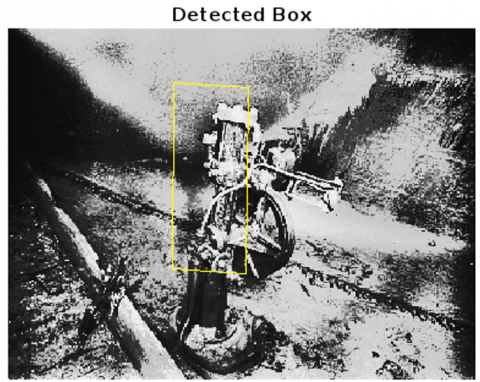
The output of the matching of features technique for matching two items identified in the picture appears in Figure 8. The noticed suspicious objects that are apparent in the undersea photos are shown in Figure 9.
Figure 8. Output of feature matching- Identification of object
Figure 9. Output for object detection
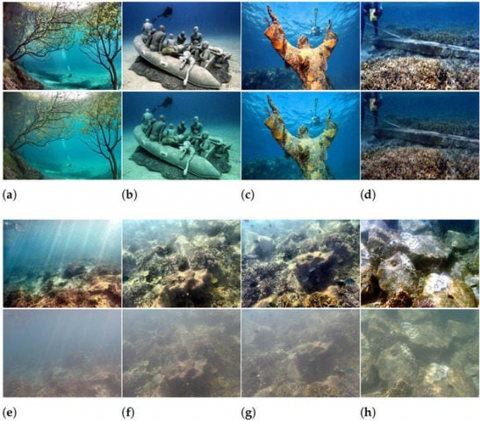
For development and research reasons, numerous data sets for underwater recognition of objects are readily available. The Underwater Object location and Identification (UW-OLI) the collection is intended for the identification, location, and recognition of objects found underwater. It contains more than 10,000 images taken under different underwater situations, each identified with classification labels and item bounding boxes. These data sets can be very useful in the development and evaluation of algorithms for the identification of underwater objects. Some of the sample images from the database that were taken into consideration are displayed in Figure 10.
Figure 10. Example dataset images
The output for pairing features of two items found in image using the feature similarity algorithm is displayed in Figure 8. The items that have been identified as suspicious in the underwater images are displayed in Figure 9.
The set contains images of underwater components such as artificial structures, coral structures, and aquatic creatures. It also contains data about the lighting, water depth, and overall quality of the pictures that were taken. Understanding this information is essential to understanding the difficulties brought on by various environmental conditions. It includes details on tags or annotations for items that point out what traits or objects exist in the pictures. Annotations are beneficial in operations like classifying and detecting items.
5.1 Performance measures for de-noising
Metrics such as Peak Signal-to-Noise Ratio (PSNR), Mean Square Error (MSE) and Structural Similarity Index (SSIM) may be utilised for assessing the denoising efficiency. While SSIM analyses the structural relationships among the initially captured and denoised images, PSNR evaluates the quality of an image to denoised images to the initial noise-free images. Formulae of PSNR and MSE and SSIM are presented as follows:
$P S N R=10 \log _{10} \frac{255^2}{M S E}$ (1)
$M S E=\frac{1}{M * N} \sum_{i=1}^M \sum_{j=1}^N[x(i, j)-x(i . j)]^2$ (2)
where, MSE and PSNR are frequently used in denoising analyses. It's important to use these tools to only provide a numerical assessment of denoising clarity; the degree of perceptual or visual a similarity between the original images and denoised images may not be reflected. For a more thorough evaluation of denoising techniques for underwater images, it is suggested to take consideration other metrics like the Structural Similarity Index (SSIM) or eye assessment.
Structural Similarity Index: To evaluate the perceived distinctions (e.g., contrast, brightness, and structure) among two similar images. Higher SSIM values are predictive of better quality images.
SSIM $=\frac{\left(2 \mu_i \mu_l+Q_1\right)\left(2 \sigma_{i l}+Q_2\right)}{\left(\mu_i^2+\mu_l^2+Q_1\right)\left(\sigma_i^2+\sigma_l^2+Q_2\right)}$ (3)
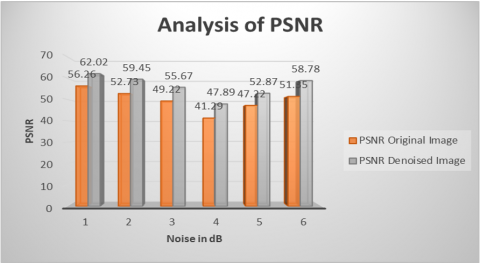
Simulation studies executed on a diver demonstrate the practicality of the method. MATLAB is used to provide the experimental simulations tool, and simulations conducted on a diver image are used to verify the technique's feasibility. The models are run at values of PSNR among 36 dB and 66 dB by changing noise quantity from 0 dB to 20 dB. There are ten phases required for implementing the white filter. Several denoising wavelet bias have been evaluated statistically on an underwater noise-filled image. As stated in Figure 11, four deconstructing phases and soft thresholding methods are implemented. Table 1 demonstrates the performance of the proposed DnCNN approach against various noise power. The MSE and PSNR percentages are calculated based on each noise power evaluation.
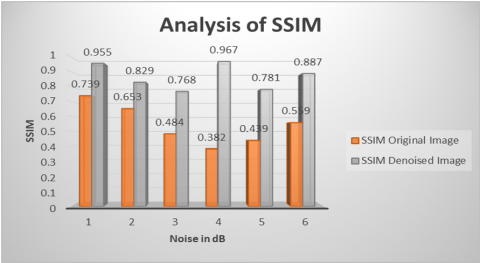
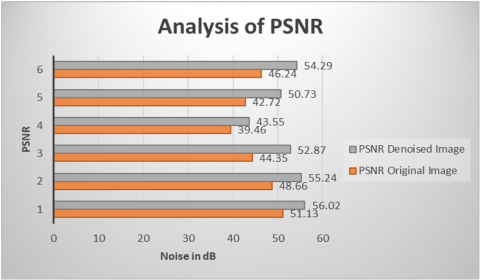
The suggested approach has been compared with the present algorithm. The comparison of MSE, PSNR, and SSIM is presented in Table 1. Although an improved SSIM value presents the result is more broadly comparable to its reference image, reduced MSE and greater PSNR values show that the reconstructed image is more similar to its reference images with respect to of image texture and structure. SSIM is utilised to assess how good people consider an image is. It assists in assessing the degree of relation between two distinct images. As seen by Table 1, Figures 11, 12, and 13, the suggested approach has a greater PSNR value and less MSE compared to benchmark methods.
Figure 11. Analysis of PSNR – undersea image using DnCNN with different noise in dB
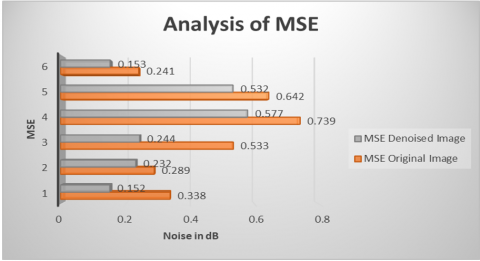
Figure 12. MSE analysis - Undersea image using DnCNN with different noise in dB
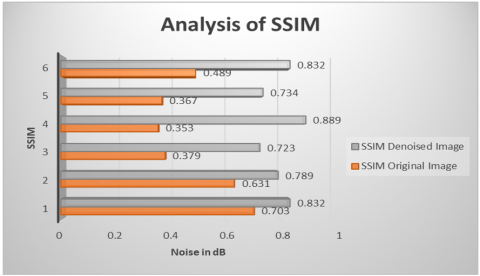
Figure 13. SSIM analysis - Underwater image using DnCNN with different noise in dB
Table 1. PSNR, MSE and SSIM on undersea image using DnCNN with different noise levels in dB
|
Noise (dB) |
PSNR |
SSIM |
MSE |
PSNR |
SSIM |
MSE |
|
Original Image |
Denoised Image |
|||||
|
0 |
56.26 |
0.739 |
0.269 |
62.02 |
0.955 |
0.0789 |
|
3 |
52.73 |
0.653 |
0.382 |
59.45 |
0.829 |
0.0778 |
|
5 |
49.22 |
0.484 |
0.633 |
55.67 |
0.768 |
0.338 |
|
10 |
41.29 |
0.382 |
0.839 |
47.89 |
0.967 |
0.787 |
|
15 |
47.22 |
0.439 |
0.733 |
52.87 |
0.781 |
0.547 |
|
20 |
51.35 |
0.559 |
0.241 |
58.78 |
0.887 |
0.0786 |
Table 2 shows the efficacy of the suggested method for undersea picture detection using CLAHE in various noise strength scenarios. MSE, the PSNR ratios are determined based on each power of noise measurement. The suggested approach was compared with the present algorithm. Table 2 compares SSIM, PSNR and MSE. Where a greater SSIM value indicates output is more broadly comparable to its source image, less MSE and high PSNR values show that produced image is very closer to its predecessors in terms of image structure. The SSIM is used to measure the perceived image's quality. Figures 14, 15, and 16, respectively, show how the recommended approach compares to current methods with regard to of MSE and the PSNR value.
Table 2. PSNR, MSE and SSIM on underwater image using CLAHE with different noise in dB
|
Noise Power (dB) |
PSNR |
MSE |
SSIM |
PSNR |
MSE |
SSIM |
|
Original Image |
Denoised Image |
|||||
|
0 |
51.13 |
0.338 |
0.703 |
56.02 |
0.152 |
0.832 |
|
3 |
48.66 |
0.289 |
0.631 |
55.24 |
0.232 |
0.789 |
|
5 |
44.35 |
0.533 |
0.379 |
52.87 |
0.244 |
0.723 |
|
10 |
39.46 |
0.739 |
0.353 |
43.55 |
0.577 |
0.889 |
|
15 |
42.72 |
0.642 |
0.367 |
50.73 |
0.532 |
0.734 |
|
20 |
46.24 |
0.241 |
0.489 |
54.29 |
0.153 |
0.832 |
Figure 14. PSNR of underwater image using CLAHE with different noise in dB
Figure 15. MSE of underwater image using CLAHE with different noise in dB
Figure 16. SSIM of underwater image using CLAHE with different noise
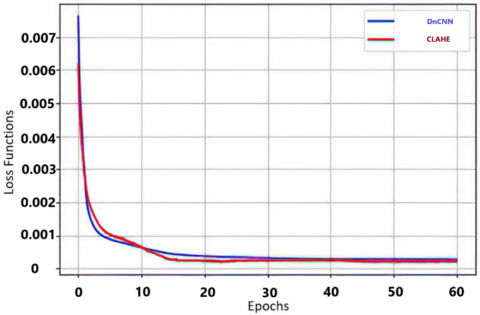
The computation of the techniques' time requirements yields the efficiency of DnCNN and CLAHE. The conventional techniques lack the training of both neural networks (CLAHE and CNN), whereas the modern ones require. Table 3 shows that while DnCNN has a smaller number of layers as CLAHE, its training duration is about half of that of CLAHE. In addition, DnCNN takes fewer minutes overall during testing. Artificial neural networks require a shorter testing time, with traditional approaches being considerably longer as DnCNN. Furthermore, the suggested plan of action beats the other options. To make the process easier to compute in the future, it needs to be updated.
Table 3 shows the fact that DnCNN got greatest PSNR, the strongest noise mitigation effect, smallest MSE value, and greatest picture edge preservation compared to other prominent methods for image processing. When the total amount of epochs rises, the reduction function becomes lower. Figure 17 demonstrates that the loss functional converges at 25 epochs.
Table 3. Comparative analysis of testing and training time of CLAHE and DnCNN
|
Algorithm |
Training Time (ms/step) |
Average Testing Time (sec) |
|
CLAHE |
425 |
0.952 |
|
DnCNN |
805 |
1.683 |
Figure 17. Loss function with epochs
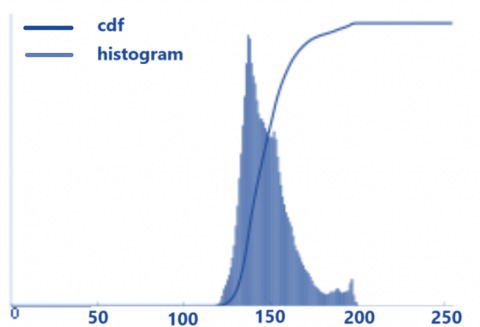
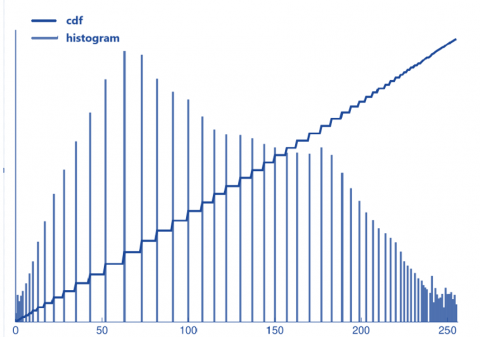
The suggested approach makes use of the transformation. Calculate the prior histogram which CDF, and Figure 18(a) shows the result. The fact that the picture would nearly match the original following equalization—even if an original was darker than the brightness one we used—is a further significant consideration. Consequently, this acts as a tool to ensure lighting is the same in every image. Most of the data that was there disappeared in this technique due to the extreme luminance. It's because the histogram it produces isn't restricted to a particular region like previous scenarios.
To solve this issue, CLAHE was applied. The image has been split into these types of small fragments referred to as "tiles". Following that, each of these blocks' histograms undergo equalization as usual. As a result, the plot of histograms would only encompass a little portion of the tiny region. It will be increased if there is any disturbance. To prevent this, brightness limiting is done. Pixels above the specified contrast limit for all histogram bins are eliminated and distributed to others prior to the application of equalization of the histogram. After equalizing, linear interpolation is utilized to remove border artifacts in tiling. The input picture histogram after CLAHE application appears in Figure 18(b).
(a)
(b)
Figure 18. a) Histogram before applying CLAHE; b) Histogram after applying CLAHE
Enhancing submarine images for the purpose of recognizing items that are suspicious can be greatly assisted by the use that uses specific image enhancement approaches, like DnCNN and CLAHE, when combined with other image improvement methods. Deep learning-based DnCNN is showing encouraging performance in difficulties involving image enhancement and denoising. A DnCNN system can be built on a sizable dataset for underwater images to increase general appeal of images by eliminating aberrations and decreasing noise. This will be beneficial to improve the visibility of suspected items which might have been hidden by poor quality images. Conversely, CLAHE improves local contrast in an image without increasing noise excessively. With better clarity and visibility, it may effectively bring out the characteristics and nuances in undersea photos, easing the process to recognize dubious things. Underwater images can be improved thoroughly through the use of these methods: CLAHE for improved contrast and DnCNN for eliminating and restoration. While CLAHE may enhance local contrasts and features even more, DnCNN is an effective decrease in noise and quality booster overall. Identifying suspect things that might be hided to spot in the initial images can be significantly aided by this combined method. The difficulties and possibilities that lie ahead in this field include colour distortion from the lack of sunshine submerged, dynamic light, limited visibility, and a dearth in labelled data. It is used in underwater surveillance through underwater autonomous vehicles and robots environmental monitoring etc. The proposed method achieved better results in term of performance indicators taken for analysis and produced better quality images as output for identifying suspicious objects clearly in an underwater image. In future generative models and data argumentation and edge computing for real time applications can be utilised by the researchers.
[1] Ulutas, G., Ustubioglu, B. (2021). Underwater image enhancement using contrast limited adaptive histogram equalization and layered difference representation. Multimedia Tools and Applications, 80: 15067-15091. https://doi.org/10.1007/s11042-020-10426-2
[2] Han, F., Yao, J., Zhu, H., Wang, C. (2020). Underwater image processing and object detection based on deep CNN method. Journal of Sensors, 2020: 6707328. https://doi.org/10.1155/2020/6707328
[3] Fu, X., Cao, X. (2020). Underwater image enhancement with global–local networks and compressed-histogram equalization. Signal Processing: Image Communication, 86: 115892. https://doi.org/10.1016/j.image.2020.115892
[4] Lee, H.S., Moon, S.W., Eom, I.K. (2020). Underwater image enhancement using successive color correction and superpixel dark channel prior. Symmetry, 12(8): 1220. https://doi.org/10.3390/sym12081220
[5] Alaguselvi, R., Murugan, K. (2023). Quantitative analysis of fundus image enhancement in the detection of diabetic retinopathy using deep convolutional neural network. IETE Journal of Research, 69(9): 6315-6325. https://doi.org/10.1080/03772063.2021.1997356
[6] Guo, S., Yan, Z., Zhang, K., Zuo, W., Zhang, L. (2019). Toward convolutional blind denoising of real photographs. In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, pp. 1712-1722. http://doi.org/10.1109/CVPR.2019.00181
[7] Ledig, C., Theis, L., Huszár, F., Caballero, J., Cunningham, A., Acosta, A., Aitken, A., Tejani, A., Totz, J., Wang, Z., Shi, W. (2017). Photo-realistic single image super-resolution using a generative adversarial network. In 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, pp. 105-114. https://doi.org/10.1109/CVPR.2017.19
[8] Sudhakara, M., Meena, M.J. (2021). Multi-scale fusion for underwater image enhancement using multi-layer perceptron. IAES International Journal of Artificial Intelligence, 10(2): 389.
[9] Chen, J., Hou, J., Chau, L.P. (2018). Light field denoising via anisotropic parallax analysis in a CNN framework. IEEE Signal Processing Letters, 25(9): 1403-1407. http://doi.org/10.1109/LSP.2018.2861212
[10] Lehtinen, J., Munkberg, J., Hasselgren, J., Laine, S., Karras, T., Aittala, M., Aila, T. (2018). Noise2Noise: Learning image restoration without clean data. arXiv preprint arXiv:1803.04189. https://doi.org/10.48550/arXiv.1803.04189
[11] Jian, M., Liu, X., Luo, H., Lu, X., Yu, H., Dong, J. (2021). Underwater image processing and analysis: A review. Signal Processing: Image Communication, 91: 116088. https://doi.org/10.1016/j.image.2020.116088
[12] Hou, G., Pan, Z., Wang, G., Yang, H., Duan, J. (2019). An efficient nonlocal variational method with application to underwater image restoration. Neurocomputing, 369: 106-121. https://doi.org/10.1016/j.neucom.2019.08.041
[13] Muniraj, M., Dhandapani, V. (2022). Underwater image enhancement by color correction and color constancy via Retinex for detail preserving. Computers and Electrical Engineering, 100: 107909. https://doi.org/10.1016/j.compeleceng.2022.107909
[14] Ramkumar, G., Ayyadurai, M., Senthilkumar, C. (2021). An effectual underwater image enhancement using deep learning algorithm. In 2021 5th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, pp. 1507-1511. https://doi.org/10.1109/ICICCS51141.2021.9432116
[15] Zhong, Y., Liu, L., Zhao, D., Li, H. (2020). A generative adversarial network for image denoising. Multimedia Tools and Applications, 79: 16517-16529. http://doi.org/10.1007/ s11042-019-7556-x
[16] Jiang, Q., Chen, Y., Wang, G., Ji, T. (2020). A novel deep neural network for noise removal from underwater image. Signal Processing: Image Communication, 87: 115921. https://doi.org/10.1016/j.image.2020.115921
[17] Lu, H., Li, Y., Uemura, T., Kim, H., Serikawa, S. (2018). Low illumination underwater light field images reconstruction using deep convolutional neural networks. Future Generation Computer Systems, 82: 142-148. https://doi.org/10.1016/j.future.2018.01.001
[18] Ding, X., Wang, Y., Zhang, J., Fu, X. (2017). Underwater image dehaze using scene depth estimation with adaptive color correction. In OCEANS 2017-Aberdeen, pp. 1-5. https://doi.org/10.1109/OCEANSE.2017.8084665
[19] Jamadandi, A., Mudenagudi, U. (2019). Exemplar-based underwater image enhancement augmented by wavelet corrected transforms. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, pp. 11-17.
[20] Yang, Q., Yan, P., Zhang, Y., Yu, H., Shi, Y., Mou, X., Wang, G. (2018). Low-dose CT image denoising using a generative adversarial network with Wasserstein distance and perceptual loss. IEEE Transactions on Medical Imaging, 37(6): 1348-1357. http://doi.org/10.1109/TMI.2018.2827462
[21] Umamageswari, A., Deepa, S., Raja, K. (2022). An enhanced approach for leaf disease identification and classification using deep learning techniques. Measurement: Sensors, 24: 100568. https://doi.org/10.1016/j.measen.2022.100568
[22] Dabov, K., Foi, A., Katkovnik, V., Egiazarian, K. (2007). Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Transactions on Image Processing, 16(8): 2080-2095. http://doi.org/10.1109/TIP.2007.901238
[23] Zhang, K., Zuo, W., Chen, Y., Meng, D., Zhang, L. (2017). Beyond a gaussian denoiser: Residual learning of deep CNN for image denoising. IEEE Transactions on Image Processing, 26(7): 3142-3155. http://doi.org/10.1109/TIP.2017.2662206
[24] Bay, H., Ess, A., Tuytelaars, T., Gool, V. (2006). Speeded-up robust features (SURF). Computer vision and image understanding (CVIU). Computer Vision and Image Understanding, 10(3): 346-359. https://doi.org/10.1016/j.cviu.2007.09.014
[25] Li, C., Guo, J., Guo, C. (2018). Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Processing Letters, 25(3): 323-327. http://doi.org/10.1109/LSP.2018.2792050
[26] Guo, Y., Li, H., Zhuang, P. (2019). Underwater image enhancement using a multiscale dense generative adversarial network. IEEE Journal of Oceanic Engineering, 45(3): 862-870. http://doi.org/10.1109/JOE.2019.2911447
[27] Umamageswari, A., Bharathiraja, N., Irene, D.S. (2023). A novel fuzzy C-means based chameleon swarm algorithm for segmentation and progressive neural architecture search for plant disease classification. ICT Express, 9(2): 160-167. https://doi.org/10.1016/j.icte.2021.08.019