Chaima Kouidri![]() | Rochdi Bachir Bouiadjra*
| Rochdi Bachir Bouiadjra*![]() | Faiza Mahi
| Faiza Mahi![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Traffic congestion stands as a primary urban development hurdle encountered by major cities. Managing the extensive network comprising these transportation systems is an immensely complex task. Unfortunately, this activity poses significant challenges in numerous cities worldwide. In this article, a hybrid method ant colony and discrete symbiotic organism optimization are proposed to enhance the traffic flow of intersections. The first one is a metaheuristic inspired of the foraging behavior of ant colonies; it is used successfully to address a variety of intricate optimization problems. The second one is DSOS adaptation which is an ecosystem-based metaheuristic optimization inspired of interrelated symbiotic strategies observed on ecosystems. This approach involves determining the ideal durations for each phase of traffic lights. In the first level, an ACO method is utilized to extract critical path of given urban zone (congested path). In the second, the DSOS algorithm is employed to enhance the optimization of querying time of delayed vehicles. The obtained results show the superiority of DSOS compared with the fixed time control method (static approach). In contrast to the conventional timing method, the mean number of queued vehicles is decreased by 20%. This confirms the effectiveness of the suggested approach in alleviating traffic congestion.
traffic flow, delayed vehicles, traffic light program, ant colony optimization, discrete symbiotic organism search
In the past few years, the global attention has been increasingly drawn towards various traffic issues due to the growing number of vehicles. Among these challenges, traffic congestion stands out as a significant concern. One important problem is traffic congestion.
However, traffic congestion can cause not only financial damages but also material and human losses through accidents. To overcome this problem, many technological and political efforts have been invested at different levels. A first solution consists in extending road transport infrastructures in the densest traffic areas. The disadvantage of this solution is its expensive nature [1].
The second proposed solution for a traffic signal control system involves managing traffic at intersections safely and efficiently using a sequence of alternating green, yellow and red lights. The issue of traffic signal operation can be addressed at three distinct levels: local, arterial, and network.
Local control implies that a signal control system takes into account only the traffic conditions specific to an isolated intersection. In contrast, the foundation of arterial control lies in the coordination of multiple signalized intersections.
Signal coordination aims for a "green wave," syncing traffic lights for smooth vehicle flow through intersections. Network signal control addresses predetermined routes, but adjusting signals may alter routing as drivers seek the fastest path.
Integrating vehicle routing and signal control is crucial to understanding traffic flow equilibrium in the network [2].
Meanwhile, research on traffic signals prompted the development by driving assistance systems, aimed at minimizing vehicle waiting time. Nevertheless, the majority of traffic systems continue to rely on fixed-time settings for lengthy cycles [3]. Such systems lack the ability to adaptively adjust traffic light timings when faced with unforeseen circumstances like accidents, natural disasters, or sudden incidents. However, those methods are not appropriate for centralized implementations in extensive traffic networks, resulting in bottlenecks at intersections [4].
The principal idea of this article is to implement an ACO-DSOS based traffic signal control system, this hybrid metaheuristics approach aims to find optimum values of traffic signal capable of providing the lowest average number of vehicles in several intersections.
The subsequent sections of the paper are organized as follows: Section 2 presents the related work of traffic signal control optimization based on metaheuristics. In Section 3 introduces problem definition and formalism. In Section 4 presents the suggested approach. The obtained results are carried out in Section 5. The last section concludes and gives some perspectives.
Traffic control system refers to a sophisticated network of technologies and algorithms designed to optimize the flow of traffic and improve overall transportation efficiency [5]. When considering traffic light problem as an optimization task, meta-heuristic methods can be utilized [6]. Consider the example from the study [7], The authors presented a framework for enhancing traffic signal optimization through the integration of Genetic Algorithm (GA) and Cellular Automata Simulation. They integrated this algorithm with Cellular Automata Simulation, including traffic flow. However, the methods fail to deliver satisfactory control results under conditions of high traffic demand.
The effectiveness of traffic signal control heavily depends on the design technique of signal plans, and one such approach is the ACO widely applied to addressing combinatorial problems [8, 9]. This algorithm functions even as collaboration system, where each individual ant simulates intelligent behavior. The Ant Colony Algorithm excels in finding best solutions to a variety problem. The ants exhibit capability to discover the shortest paths by depositing a chemical substance, pheromone, on their trails towards food sources. This pheromone serves as a communication link among ants, and paths with higher pheromone concentrations become more attractive and are predominantly used by the majority of ants [10].
In the study [11], The authors suggested employing the ant colony method in conjunction with the concept of colored connected vehicles to address the dynamic traffic routing problem, which encompasses multi-source and multi-destination traffic flows. Their approach aims to optimize the routing of traffic in real-time.
Meanwhile, a newly developed optimization algorithm called the DSOS algorithm has demonstrated remarkable effectiveness and robustness in solving numerical optimization and engineering design problems [12]. Additionally, the same study [12] introduces the DSOS algorithm to address the capacitated vehicle routing problem, aiming to determine optimal routes for a fleet of vehicles to serve a specified set of demand points while minimizing total routing costs.
All of the works in this section and in the body of literature for this area don’t use intricate road networks and several intersections. To overcome the challenges work in current section there is a great need for developing novel approaches.
Major urban centers are encountering a notable surge in traffic demand, leading to congestion issues on their road networks, a widespread challenge observed across cities globally. Performance indicators for the traffic signal problem typically include the delayed of vehicles. The objective is to optimize traffic signal synchronization to reduce traffic congestion. Traffic status can be evaluated in an objective function using metrics such as queue length, the number of vehicles released, arrival of vehicles, green light, and red light. Subsequently, minimizing the objective function aims to optimize the average number of waiting vehicles, as outlined by the following formula:
$L R(K)=\frac{L R_{j l}^i(k-1)+\sum_{i=1}^l\left(q_{j l}^i(k)-\mu_{j l}^i\right) g^i(k)}{D(k)}+\frac{L R_{j l}^i(k-1)+\sum_{i=1}^l\left(q_{j l}^i(k) R^i(k)\right)}{P(k)}$ (1)
The Eq. (1) addresses the identification of traffic lights at critical intersections, structured into two parts for mathematical formulation. The first part computes the mean count of vehicles in queue during green signal phases. Subsequently, in the second part, the focus shifts to determining the mean count of vehicles in queue during red signal phases, providing comprehensive analysis of traffic flow dynamics at these critical junctions.
In Eq. (1), LR(K) define the vehicles in queue during both green and red time, where k represents number of cycles, while K represents the maximum number of cycles. l presents the lane, while "1", "2", and "3" correspond to the left, straight, and right directions. j presents directions south, and north, east, west. i indicates the phase. $L R_{j l}^i(k-1)$ represents the number of delayed vehicles at the (k-1) cycle. It denotes the accumulated delay or backlog of vehicles from the previous cycle at the end of the last phase. $q_{j l}^i(k)$ is the arrival vehicle of the $k$ cycle (veh/s). $\mu_{j l}^i$ presents the vehicles released. $g^i(k)$, $R^i(k)$ are the green and red time of i phase in the k cycle. The total of cycle k 's green time is denoted as D(k), and the total of cycle k 's red time is denoted as P(k).
3.1 Constraints
It's important to take into account the specific constraints. Here are some common constraints that can be encountered on traffic light scheduling problem instances:
Traffic light management is a critical aspect in the planning and development of traffic control systems, as improper synchronization could lead to notable traffic congestion. Unfortunately, researchers have not yet found a definitive solution to solve the traffic congestion problem. At present, the majority of traffic management systems continue to employ predefined time intervals for regulating traffic lights.
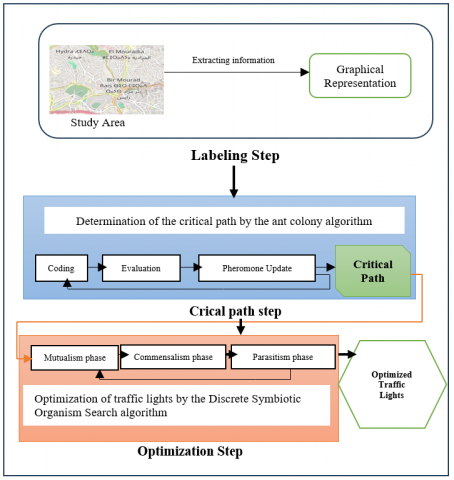
The objective of the strategy is to apply the algorithm ant colony to find the critical path that generate a very large number of cars waiting in a very important research space which will be the subject of the first level. The second level is the most important part that allows for the implementation of DSOS in traffic signal control in order to minimize vehicle wait times (see Figure 1).
Figure 1. Proposed approach framework
4.1 Ant colony optimization
The process of ant colony shows great potential as a metaheuristic, drawing substantial interest in both empirical investigations and theoretical studies. The ants employ indirect communication by utilizing a chemical substance termed pheromone, which not only accumulates but also undergoes evaporation [13]. Pheromone deposition is continuous and undergoes evaporation over time. Simultaneously, ants continually secrete pheromones during their travel, ensuring a continuous update of the pheromone trail. The pheromone concentration decreases gradually on paths less traveled by ants, while it increases progressively on paths frequented by a larger number of ants. This establishes a positive feedback loop, ultimately leading all ants to choose the shortest path [14].
In other words, the Ant Colony Algorithm (ACA) maximizes the potential of basic agents consisting of ants, progressively generating solutions to the optimization problem. Following the guidance of pheromones, an individual ant builds a comprehensive solution, beginning with a blank solution and progressively integrating solution components through iterative steps. Following the creation of a solution, each ant contributes feedback by releasing pheromones specific to each solution component [15].
4.2 Adaptive ant colony optimization for critical path determination
We will present in our paper the application of a metaheuristic that allows solving the problem of determining traffic lights that cause vehicles to wait at traffic points, derived from the social interactions observed in ant colonies [16]. Following the guidance of pheromones, an individual ant builds a comprehensive solution. The extent of pheromone concentration serves as an indicator of the obstructed status of a pathway. A heightened concentration of pheromones on a path signifies the critical route within a specific urban zone associated with congestion and high traffic volume.
The pheromone can be updated by the m ants that have provided a solution within the iteration. The pheromone is represented by $\tau_{i j}$, in our context this variable represents the flow of lane ij. We apply the formula (2) to update $\tau_{i j}$.
$\tau_{i j}=\rho \tau_{i j}+\sum_{k=1}^m \Delta \tau_{i j}^k$ (2)
The parameter ρ is proportion of pheromones, $\Delta \tau_{i j}^k$ is the amount pheromone left on lane (i, j) by ant k:
$\Delta \tau_{\mathrm{ij}}^k=\left\{\begin{array}{lr}\frac{Q}{L^k} & \mathrm{k}: \text { Ant moves from lights } \mathrm{i} \text { to } \mathrm{j} \\ 0 & \text { otherwise }\end{array}\right.$ (3)
Q is a fixed value, Lk is traffic flow of $lane_{ij}$ that is determined by ant k. Throughout the algorithm execution, all ants survey the set of traffic lights. When one ant standing on $traffic \,\, signal_i$, it has determined the partial solution, moving probability towards traffic light j is given by the following Eq. (4):
$P_{i j}^k=\frac{\left[\boldsymbol{\tau}_{i j}\right]^\alpha *\left[\mu_{i j}\right]^\beta}{\sum_{l \in N_l^k}\left[\boldsymbol{\tau}_{i j}\right]^\alpha *\left[\mu_{i j}\right]^\beta}$ (4)
The parameter $N_l^k$ here represents an eligible component. Other words, it describes all of $lane_{il}$ where l indicates unvisited traffic signal with each ant. $\alpha$ and β are related to pheromone and real information of road.
$\mu_{i j}=\frac{\mathbf{1}}{\boldsymbol{d}_{i j}}$ (5)
where the parameter dij indicates the number of vehicles between traffic lights i and j.
The algorithm is based on a set of ants, each traversing a path among the possible ones. At each step, the ant chooses to move from one traffic signal to another based on a set of rules:
- An ant chooses a path and leaves a trail of pheromones.
- The entire set of ants explores a certain number of paths, with each ant depositing quantity of pheromone commensurate with the path's quality.
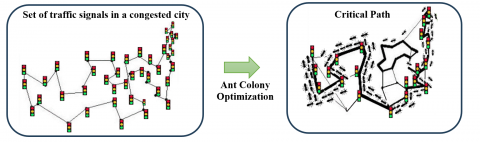
- High concentration of pheromones in a path indicates high congestion in the path itself, as shown in the Figure 2.
The evaporation of pheromones eliminates the poor solutions (less congested paths).
Figure 2. Determination of critical path
4.3 Symbiotic organism search algorithm
A symbiotic organism search algorithm, emulates the interaction behaviors observed between species in nature, as these species seldom exist in solitude owing to their mutual dependence. Symbiotic relationships can be obligatory, signifying a mutual dependence necessary for survival, or facultative, denoting a non-essential connection that proves beneficial to both entities [17]. This Algorithm is an inventive ecosystem-based metaheuristic approach, which is employed to address a continuous space optimization problem. It emulates the relationships of symbiotic, comprising the three mains phases of SOS [18]. The first phase refers to a symbiotic association among distinct organisms, the couple entities derive benefits for their connection. In the second phase, one organism profit symbiotically, while the other organism uninfluenced by the association. The third relationship, one species benefits symbiotically at the expense of another species [19].
4.4 Framework of discrete symbiotic organism search
The aim of our study is to reduce traffic congestion by controlling traffic light using DSOS algorithm. However, the scenario studied comprises a several intersections.
The search for symbiotic organisms (SOS) is a metaheuristic optimization technique recently developed to resolve maximization or minimization problems [20]. Algorithm SOS employs organisms population to represent potential solutions, which undergo iterative evolution to optimize the search process [21].
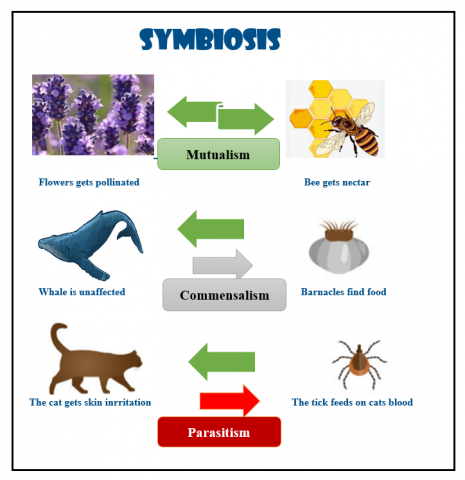
Every organism corresponds to a specific solution for an optimization problem. In the beginning, the potential solutions are generated at random, followed by a subsequent phase of refining these solutions through a specific process [22]. Organisms within the ecosystem adapt their positions based on the biological interaction models of mutualism, commensalism, and parasitism. The phase mutualism of relationship characterizes the mutually beneficial symbiotic association between two distinct species and This is implemented during the initial phase of the DSOS algorithm. In the second process of the DSOS, the commensalism is employed to finally adjust the solution space. During the third phase of the algorithm, the method of parasitic interaction is utilized, wherein one organism benefits at the expense of the other, causing harm to the latter [21, 22]. Figure 3 shows the basic framework of three phases of SOS algorithm.
4.4.1 Description of the organism
SOS starts its operation by randomly generating a number N of species to inhabit the population. In this case, each species symbolizes a potential solution of the traffic light (green, red). The algorithm starts just after the establishment of the initial population. However, the ecosystem is a collection of organisms, and each organism is a collection of traffic lights (green, red).
The species’s positions within the solution space are denoted by integers (green lights and red lights). The objective function to be minimized is given by Eq. (1). The function LR find X’ belong to solution space (D) where LR is a fitness function to be minimized in Eq. (1). A set of species is expressed by $\mathrm{X}^{\prime}=\left[x_1, x_2, \cdots, x_n\right]$, where $x_1$ represents green and red lights for each lane.
Figure 3. Visualization of the phases of SOS algorithm
4.4.2 Steps of the algorithm
- Mutualism phase
An organism comprises a collection of lights (green and red), denoted as $\boldsymbol{X}_{\boldsymbol{j} \text { green }}^{\prime}, \boldsymbol{X}_{\boldsymbol{j} \text { red }}^{\prime}$ which are randomly selected from the population to engage in mutually beneficial interaction with another organism's $\boldsymbol{X}_{\boldsymbol{i} \text { green }}^{\prime}, \boldsymbol{X}_{\boldsymbol{i} \text { red }}^{\prime}$ according to the following formulas:
$X_{i \text { green }}^{\prime}=X_{i\text { green }}+r^{\prime}\left(X_{\text {best }}-\operatorname{MutualV}(green) F_1\right)$ (6)
$X_{i \text { red }}^{\prime}=X_{i\text { red }}+r^{\prime}\left(X_{\text {best }}-\operatorname{MutualV}(red) F_1\right)$ (7)
$X_{j \text { green }}^{\prime}=X_{j \text { green }}+r^{\prime \prime}\left(X_{\text {best }}-\operatorname{MutualV}(green) F_2\right)$ (8)
$X_{j \text { red }}^{\prime}=X_{j \text { red }}+r^{\prime \prime}\left(X_{\text {best }}-\operatorname{MutualV}(red) F_2\right)$ (9)
where,
$MutualV(green)=\frac{\boldsymbol{X}_{\boldsymbol{i} \text { green }}+\boldsymbol{X}_{\boldsymbol{j} \text { green }}}{2}, \quad MutualV(red)=\frac{\boldsymbol{X}_{i\text { red }}+\boldsymbol{X}_{j \text { red }}}{2}$
And $r^{\prime}, r^{\prime \prime}$ are assigned randomly between 0 and 1.
The explanation for the roles of F1 and F2 are provided below. In nature, some mutualism relationships one organism may receive a greater advantageous outcome compared to the other organism. The benefit factors F1 and F2 are assigned randomly, either as 1 or 2.
We calculated the new green and red lights ($X_{i\text { green}}^{\prime}, X_{i\text { red}}^{\prime}, X_{j \text { green}}^{\prime}, X_{j \text { red}}^{\prime}$) with the Eqs. (6)-(9) and applying the objective function (1) and testing with the previous objective function and keeping the best objective function which contains the best red green lights with a minimum of waiting time.
- Commensalism phase
$X_{j \text { green}}$ and $X_{j \text { red}}$ are organisms selected randomly from the eco-system to interact with $X_{i \text { green}}$ and $X_{i \text { red}}$. Throughout this phase, $X_{i \text { red}}$ and $X_{i \text { red}}$ benefits from $X_{j \text { green}}$ and $X_{j \text { red}}$. The relationship described in the following formulas:
$X_{i\text { green }}^{\prime}=\left|X_{i \text { green }}+r^{\prime}\left(X_{\text {best }}-X_{j \text { green }}\right)\right|$ (10)
$X_{i\text { red }}^{\prime}=\left|X_{i \text { red }}+r^{\prime}\left(X_{\text {best }}-X_{j\text { red }}\right)\right|$ (11)
We calculated the new green and red lights $X_{i \text { green}}^{\prime}$, $X_{i \text { red}}^{\prime}$ and applying the objective function (1) and testing with the previous objective function and keeping the best objective function which contains the best red green lights with a minimum of waiting time.
- Parasitism phase
A vector representing a parasite $X_{p \text { green}}$, $X_{p \text { red}}$ are generated by mutating $X_{i \text { green}}$, $X_{i \text { red}}$. This mutation consists of generating a random number within the range of variables, which are also randomly selected from the ecosystem.
$X_{p \text { green }}=\left|X_{i\text { green }}\right|$ (12)
$X_{p \text { red }}=\left|X_{i\text { red }}\right|$ (13)
After computing the new durations for the green and red lights, denoted as $X_{p \text { green}}$ and $X_{p \text { red}}$ respectively, we assessed their performance by applying the objective function (1). We also compared the results with those obtained using the previous objective function. Our aim was to identify the optimal combination of green and red light timings that minimize number waiting vehicles. Consequently, we retained the objective function that yielded the most favorable red and green light settings, resulting in the least waiting time for traffic.
In this work, our focus is to study the efficiency of DSOS in traffic congestion problems. We implement the DSOS algorithm in JAVA and execute it on a computer system featuring an Intel(R) 2.71 GHz Core (TM) i5-7300U processor with 8 GB of memory.
5.1 Case study: Algiers area
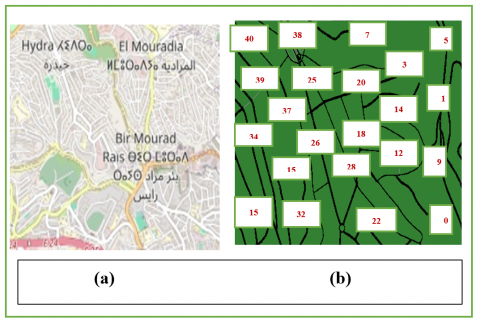
In Figure 4, we examine a situation originating from the traffic infrastructure of Algiers [23]. The chosen urban zone is bounded to the north by El Biar, to the south by Said Hamdine, to the west by Val d’Hydra Street, and to the east by El Madania. This covers an approximate area of 1 square kilometer, featuring 21 lanes regulated by 40 traffic signals within the subgraph (a) of Figure 4. The subgraph (b) of Figure 4 was created with the aid of SUMO [24, 25].
Figure 4. Number of traffic lights examined
In our study we used Simulator of Urban Mobility (SUMO) [24, 25]. It is a microscopic road traffic simulator renowned for furnishing detailed data on vehicle velocities. This simulator allows us creating the model for mobility of vehicles, as well as the scenario taken from the OpenStreetMap [26, 27]. we summarize the operationalization of traffic involves predicting the traffic congestion level of urban roads to minimize the querying time of delayed vehicles.
We used two levels; the first level makes it possible to use the Ant Colony Algorithm to determine the critical lanes (Lane 0- Lane 9-Lane 3- Lane7). The second level DSOS algorithm to minimize number of vehicles waiting only for critical lanes.
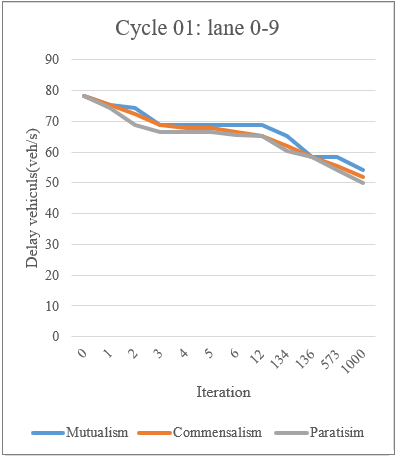
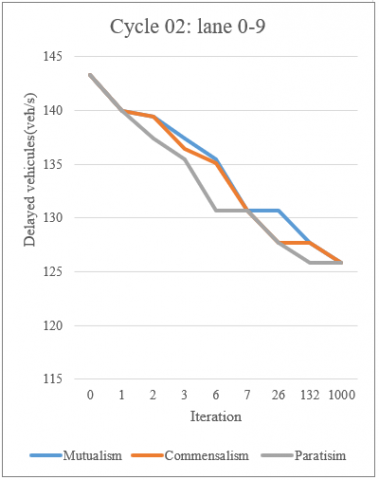
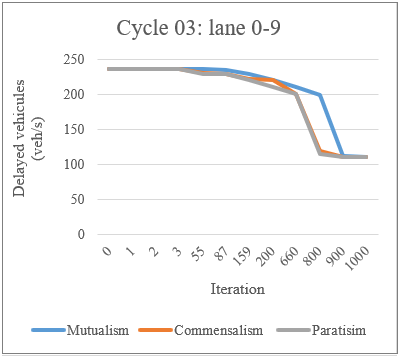
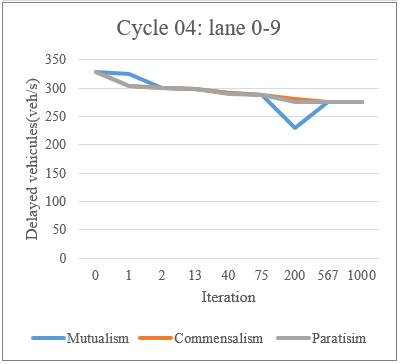
5.2 Impact of the 3 operators on the waiting vehicles
The effect of the DSOS approach on minimizing the number of waiting vehicles gives a better convergence of the function. However, the algorithm mimics the three phases relationship to ameliorate quality of a fitness function. In this experiment, results indicate the average of the hundreds of simulations.
Figure 5. Impact of mutualism, commensalism and parasitism on the waiting vehicles
Examining the convergence patterns depicted in Figure 5 provides valuable insights into the iterative refinement occurring with each execution of the mechanism. The notable improvement in DSOS performance can be attributed to the distinctive mechanisms of mutual benefit and parasitic vectors embedded within DSOS. This exploitation power becomes instrumental in honing in on optimal solutions efficiently. The commensalism mechanism acts as a balancing force between exploration and exploitation. This delicate equilibrium results in enhanced performance and more efficient optimization. The algorithm's ability to adapt to the evolving landscape of the search space becomes crucial, and the commensalism mechanism, by design, contributes to the flexibility needed to avoid stagnation in local optima.
Moreover, the parasitism phase introduces a dimension of exploration that goes beyond fixating solely on the best solution regions. This strategy inclusion ensures that the search process remains dynamic and ventures into unexplored territories, preventing confinement to specific search regions.
The success of DSOS is intricately tied to the nuanced orchestration of its mutual benefit, commensalism, and parasitism mechanisms. These elements work in concert, providing the algorithm with the adaptability, diversity, and exploration capabilities necessary for robust and effective optimization in complex problem spaces.
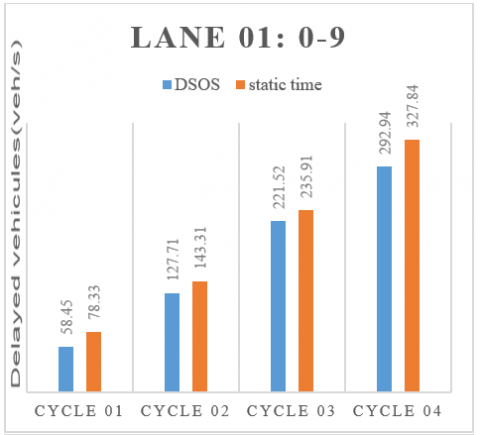
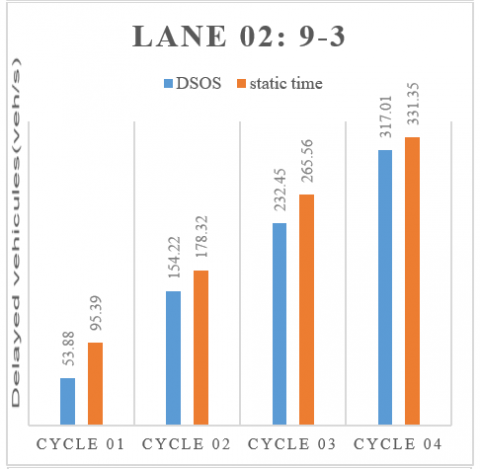
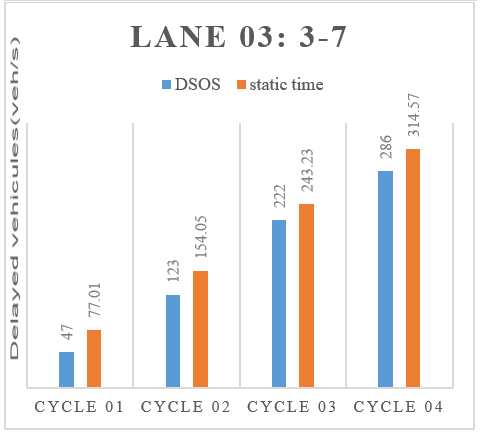
Figure 6. Comparison of DSOS synchronization results with static time
5.3 Performance of DSOS versus static approach
To validate the performance of DSOS we conducted a comparison study with Static Approach. The obtained numerical results in terms of fitness value are visualized in Figure 6.
In the context of static time systems, a fixed control strategy is predetermined within specific time intervals based on historical data and predetermined rates. This approach, while providing some level of stability, may not adapt dynamically to changing traffic conditions. The timing plan remains constant, and the predetermined rates may not be optimal in all situations.
Analyzing the results presented in Figure 6, a clear distinction emerges between the solutions obtained by DSOS and the static approach, especially as the number of iterations increases. DSOS consistently produces solutions of superior quality, showcasing its adaptive nature and effectiveness in optimizing traffic signal timings. The DSOS approach stands out by demonstrating its capability to enhance solution quality throughout the research process stages. The three pivotal operators—Mutualism, Commensalism, and Parasitism—play a crucial role in this improvement. The ability of DSOS to outperform static approaches underscores the importance of incorporating adaptability and learning mechanisms in traffic signal control systems. The dynamic nature of DSOS enables it to respond to variations in traffic conditions, ultimately leading to more efficient and effective traffic signal timings. the approach exhibits its strength in adapting to evolving conditions, providing solutions of higher quality compared to static time systems. The incorporation of the three operators ensures that DSOS can navigate through solution spaces effectively, making it a promising methodology for optimizing traffic signal control in dynamic and complex urban environments.
On the other hand, the sensitivity of the algorithm to its parameters introduces a layer of complexity that can significantly influence its overall performance. These parameters act as tuning knobs, dictating the behavior and efficacy of the algorithm in navigating the solution space.
The objective of this study was to explore traffic lights control improved by ACO-DSOS algorithm to reduce traffic flow of road; an enhanced approach tailored for the optimization of traffic signal timings. The central goal of this algorithm is to elevate overall system efficiency by strategically minimizing the number of vehicles in waiting, thus fostering a marked improvement in traffic flow at numerous intersections. Our comprehensive simulations demonstrate that the ACO-DSOS algorithm not only effectively achieves its primary objective but also yields superior performance compared to static approach. The outcomes of the simulation underscore the algorithm's potential to significantly enhance the operational efficiency of traffic networks, promising tangible benefits for urban mobility and transportation systems.
In real traffic networks, the system utilizes strategically placed detectors that continuously capture diverse real-time data, including the number of delayed vehicles, arrival vehicles, number vehicles released, red light, green light. By processing this live information, the system dynamically adapts, optimizing the number of waiting vehicles and enhancing accuracy and responsiveness for effective traffic flow solutions.
As further research, we will implement multi-objective optimization solution, considering factors such as delayed vehicle time, emergency vehicles, and pedestrian cases. We aim to integrate this solution with diverse traffic data sources and test it on larger, complex networks for scalability and effectiveness in varied urban contexts.
[1] Maity, S., Bhattacharyya, A., Singh, P.K., Kumar, M., Sarkar, R. (2022). Last decade in vehicle detection and classification: A comprehensive survey. Archives of Computational Methods in Engineering, 29: 5259-5296. https://doi.org/10.1007/s11831-022-09764-1
[2] Jin, J. (2018). Advance traffic signal control systems with emerging technologies. Doctoral dissertation. KTH Royal Institute of Technology.
[3] Jovanović, A., Teodorović, D. (2022). Fixed-time traffic control at superstreet intersections by bee colony optimization. Transportation Research Record, 2676(4): 228-241. https://doi.org/10.1177/03611981211058104
[4] Zhang, Y.C., Su, R. (2021). An optimization model and traffic light control scheme for heterogeneous traffic systems. Transportation Research. Part C: Emerging Technologies, 124: 102911. https://doi.org/10.1016/j.trc.2020.102911
[5] Ajay, P., Nagaraj, B., Pillai, B.M., Suthakorn, J., Bradha, M. (2022). Intelligent ecofriendly transport management system based on IoT in urban areas. Environment, Development and Sustainability. https://doi.org/10.1007/s10668-021-02010-x
[6] Rahmanifar, G., Mohammadi, M., Sherafat, A., Hajiaghaei-Keshteli, M., Fusco, G., Colombaroni, C. (2023). Heuristic approaches to address vehicle routing problem in the IoT-based waste management system. Expert Systems with Applications, 220: 119708. https://doi.org/10.1016/j.eswa.2023.119708
[7] Sánchez, J.J. Galán, M. Rubio, E. (2004). Genetic algorithms and cellular automata: A new architecture for traffic light cycles optimization. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE Cat. No.04TH8753), Portland, OR, USA, pp. 1668-1674. https://doi.org/10.1109/CEC.2004.1331096
[8] Raval, C., Hegde, S. (2011). Ant-CAMP: Ant based congestion adaptive multipath routing protocol for wireless networks. In 2011 International Conference on Emerging Trends in Networks and Computer Communications (ETNCC), Udaipur, India, pp. 463-468. https://doi.org/10.1109/ETNCC.2011.6255882
[9] Wang, X.Y., Liu, C.H., Wang, Y.P., Huang, C.K. (2014). Application of ant colony optimized routing algorithm based on evolving graph model in VANETs. In 2014 International Symposium on Wireless Personal Multimedia Communications (WPMC), Sydney, NSW, Australia, pp. 265-270. https://doi.org/10.1109/WPMC.2014.7014828
[10] Triay, J., Cervello-Pastor, C. (2010). An ant-based algorithm for distributed routing and wavelength assignment in dynamic optical networks. IEEE Journal on Selected Areas in Communications, 28(4): 542-552. https://doi.org/10.1109/JSAC.2010.100504
[11] Nguyen, T.H., Jung, J.J. (2021). Ant colony optimization-based traffic routing with intersection negotiation for connected vehicles. Applied Soft Computing, 112: 107828. https://doi.org/10.1016/j.asoc.2021.107828
[12] Deng, Z.J., Luo, L.Y., Zhan, Z.H., Zhang, J. (2021). Knowledge embedding-assisted multi-exemplar learning particle swarm optimization for traffic signal timing optimization. In 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, pp. 248-255. https://doi.org/10.1109/CEC45853.2021.9504703
[13] He, J.J., Hou, Z.E. (2012). Ant colony algorithm for traffic signal timing optimization. Advances in Engineering Software, 43(1): 14-18. https://doi.org/10.1016/j.advengsoft.2011.09.002
[14] Neto R.F.T., Godinho Filho, M. (2011). An ant colony optimization approach to a permutational flowshop scheduling problem with outsourcing allowed. Computers & Operations Research, 38(9): 1286-1293. https://doi.org/10.1016/j.cor.2010.11.010
[15] Yang, J.G., Zhuang, Y.B. (2010). An improved ant colony optimization algorithm for solving a complex combinatorial optimization problem. Applied Soft Computing, 10(2): 653-660. https://doi.org/10.1016/j.asoc.2009.08.040
[16] Li, S.G., Wei, Y.F., Liu, X., Zhu, H., Yu, Z.X. (2022). A new fast ant colony optimization algorithm: The saltatory evolution ant colony optimization algorithm. Mathematics, 10(6): 925. https://doi.org/10.3390/math10060925
[17] Talatahari, S., Goodarzimehr, V., Shojaee, S. (2021). Symbiotic organisms search and Harmony search algorithms for discrete optimization of structures. International Journal of Optimization in Civil Engineering, 11(2): 177-194.
[18] Abdullahi, M., Ngadi, M.A. (2016). Hybrid symbiotic organisms search optimization algorithm for scheduling of tasks on cloud computing environment. PloS One, 11(8): e0162054. https://doi.org/10.1371/journal.pone.0162054
[19] Gharehchopogh, F.S., Shayanfar, H., Gholizadeh, H. (2020). A comprehensive survey on symbiotic organisms search algorithms. Artificial Intelligence Review, 53(3): 2265-2312.
[20] Abdullahi, M., Ngadi, M.A., Dishing, S.I., Abdulhamid, S.M., Usman, M.J. (2020). A survey of symbiotic organisms search algorithms and applications. Neural Computing and Applications, 32: 547-566. https://doi.org/10.1007/s00521-019-04170-4
[21] Abdullahi, M., Ngadi, M.A. (2016). Hybrid symbiotic organisms search optimization algorithm for scheduling of tasks on cloud computing environment. PloS One, 11(8): e0162054. https://doi.org/10.1371/journal.pone.0162054
[22] Ezugwu, A.E., Prayogo, D. (2019). Symbiotic organisms search algorithm: Theory, recent advances and applications. Expert Systems with Applications, 119: 184-209. https://doi.org/10.1016/j.eswa.2018.10.045
[23] The Editors of Encyclopedia Britannica. (2023). Algiers. In Encyclopedia Britannica. https://www.britannica.com/facts/Algiers, accessed on Mar. 7, 2023.
[24] Sumolib-SUMOdocumentation. https://sumo.dlr.de/docs/Tools/Sumolib.html.
[25] Kusari, A., Li, P., Yang, H., Punshi, N., Rasulis, M., Bogard, S., LeBlanc, D.J. (2022). Enhancing SUMO simulator for simulation based testing and validation of autonomous vehicles. In 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, pp. 829-835. https://doi.org/10.1109/IV51971.2022.9827241
[26] Curran, K., Crumlish, J., Fisher, G. (2019). OpenStreetMap. International Journal of Interactive Communication Systems and Technologies, 2(1): 69-78. https://doi.org/10.4018/ijicst.2012010105
[27] Fitri, M.S.N., Marena, O., Hisam, O.A., Hafiz, M.Y.M., Izzati, A.K.N. (2022). Suitability of open street map (OSM) for 1: 50,000 topographic map. In IOP Conference Series: Earth and Environmental Science, 1051(1): 012012. https://doi.org/10.1088/1755-1315/1051/1/012012