Balakrishnan Baranitharan![]() | Karthik Chandran
| Karthik Chandran![]() | Ayodeji Olalekan Salau*
| Ayodeji Olalekan Salau*![]() | Olubunmi Ajala
| Olubunmi Ajala![]() | Deepak Nattarayan
| Deepak Nattarayan![]() | V. Dass Mohan
| V. Dass Mohan![]() | Ting Tin Tin
| Ting Tin Tin![]() | Aitizaz Ali
| Aitizaz Ali![]() | Sepiribo Lucky Braide
| Sepiribo Lucky Braide![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Significant problems, including a lack of available labour, rising running costs, and ineffective use of essential resources such as water, continue to plague agriculture. Responding to these urgent problems, this work presents a novel solar-powered autonomous agricultural robot designed specifically for two purposes: water spray and grass cutting. The robot runs are independent of traditional fuels by using renewable solar energy, thus reducing environmental impact. A Bluetooth-enabled remote control, which enables users to operate it conveniently and flexibly, adds enhanced functionality. Field tests demonstrate that the use of this agrobot drastically reduces human labour input, thus reducing manpower requirements by about 72%, time consumption by 66%, and the total cost of grass-cutting activities by 72%. Similar gains were observed in water spraying jobs, with labour input and time consumption reduced by 66% and 62% respectively. These results not only show the robot’s cost-effectiveness and efficiency but also highlight its role in encouraging sustainable agricultural practices. Particularly in areas with limited resources, the combination of smart control systems and clean energy solutions holds significant potential for this technology in future agricultural applications. Ultimately, the proposed agrobot shows a feasible path toward ecological responsibility in agriculture, improved crop yields, and agricultural automation.
autonomous agricultural robot, solar-powered, Bluetooth, irrigation, energy efficiency
A key component of human society, agriculture is necessary not only to produce food but also to maintain economic stability and supply raw materials for a wide range of industries, such as bioenergy, textiles, and pharmaceuticals. Millions of people depend on agriculture for their livelihoods, especially in rural areas, and it is essential to preserving ecological balance through sustainable practices. However, growing labour shortages, growing operating costs, and wasteful use of vital resources like energy and water are posing a growing threat to the industry. Both environmental sustainability and productivity are at risk from these problems.
A variety of mechanised and semi-automated tools, such as motorised sprayers and electric grass cutters, have been introduced in response to these difficulties. Even though these technologies are better than manual techniques, they frequently rely on non-renewable energy sources, require expensive maintenance, or are not flexible enough for small-scale or resource-constrained farms. Furthermore, the majority of current systems lack automation and data-driven decision-making, which reduces their accuracy and efficiency.
This study proposes a solar-powered autonomous agrobot that can cut grass and spray water in order to address these drawbacks. The system has been improved with Bluetooth-based control for user convenience and incorporates intelligent mechanisms for effective task execution and energy use. This multipurpose robot is a workable solution for contemporary, sustainable agriculture since it seeks to decrease manual labour, lower operating costs, and enhance resource management.
Numerous researchers have looked into using robotics and solar energy in agriculture to solve pressing problems like a lack of automation, labour shortages, and energy inefficiency. Lajnef et al. [1] demonstrated the possibility of displacing traditional energy sources with a solar-powered water pumping model in which solar panels transformed sunlight into useful electricity to run irrigation systems.
Thakur et al. [2] suggested policy-level adjustments and underlined the increasing need for technological advancement in Indian agriculture, particularly through solar integration. To help with design optimisation, Chikh et al. [3] created a software tool to evaluate and model the performance of standalone PV systems. A solar floating pump system was developed by Nair et al. [4] to address issues with stability and energy output.
Similar to this, Mukherjee and Sengupta [5] illustrated a solar irrigation system intended for agricultural applications, highlighting its effectiveness and scalability. In order to improve water usage and productivity, Venkatasiva and Naik [6] went one step further and integrated soil moisture sensors to automate irrigation based on current soil conditions.
Robotics and the Internet of Things have drawn attention to automation and smart farming. In an effort to automate crop management, Apat et al. [7] created a seed-sowing robot that uses sensors to monitor soil conditions and sends farmers an SMS alert. A software architecture for coordinating several agricultural robots by dynamically allocating tasks according to energy levels and routing was presented by Gutiérrez-Cejudo et al. [8]. Agrobots’ roles in assisting with planning and policy decisions were examined by Canavari et al. [9]. In order to forecast the conditions for optimising yields, Ramani et al. [10] implemented a monitoring system that uses ATMEGA controllers to collect environmental data.
A lot of research has also been done on solar energy as a more general agricultural tool. In their discussion of obstacles such as inefficiency and high cost, Kabir et al. [11] offered a strategic framework for enhancing the use of solar energy. Photovoltaic agricultural technologies, including solar dryers and pumps, and their effects on productivity were examined by Poonia et al. [12]. After analysing contemporary sprayer technologies, Jalu et al. [13] provided recommendations for choosing ecologically friendly spraying techniques.
The difficulties of incorporating solar energy into bigger energy systems have been the subject of other studies. Jamshidi et al. [14] highlighted the challenges of connecting solar energy to power grids, while Marwan et al. [15] investigated robot calibration methods to increase motion accuracy. An integrated PV/T collector system with a high energy-saving efficiency was introduced by Huang et al. [16], outperforming traditional solar designs.
Solar-powered grass cutters are the result of numerous projects. For low light levels, Kulhariya et al. [17] created one that supports rechargeable batteries. Both Dalal et al. [18] and Palve et al. [19] developed automated models with mobility systems and solar motors; Palve’s model additionally included manual and Bluetooth control. Pushpak [20] made a contribution by modelling and simulating energy-efficient solar grass cutters.
There have also been attempts to combine cutting and spraying. An RF-controlled dual-function system was created by Ramya et al. [21]. A solar grass cutter created by Ismail et al. [22] provided more than two hours of continuous use between charges. For dependable operation in isolated locations, Issa et al. [23] introduced a mobile sprayer powered by a solar panel and a lead-acid battery.
Automation is being further advanced by robotic control and smart sensing. In order to minimise manual labour, Emmi et al. [24] concentrated on incorporating actuators and sensors into agricultural robots. In order to support real-time decision-making, Stočes et al. [25] and Dagar et al. [26] investigated IoT-based solutions for monitoring environmental parameters like soil moisture and temperature. By creating a solar sprayer that reduces human exposure to dangerous chemicals, Sontakke et al. [27] addressed safety concerns. A cost-effective robot that can spray and monitor crops on its own was proposed by Ghafar et al. [28], with future development aiming for complete automation [29-31].
Although these contributions have advanced agricultural technology, many of them are narrowly focused, frequently concentrating on a single task or lacking integrated automation. The study’s suggested system is unique in that it combines two necessary functions—watering and mowing the lawn—into a single, self-sufficient, solar-powered device. This robot is intended to provide a useful and economical solution, especially for farms dealing with labour and energy shortages, thanks to its Bluetooth-based control.
2.1 Description of components
The autonomous agricultural robot uses carefully selected materials to ensure durability and functionality. Its chassis and frame are constructed from lightweight yet sturdy materials like aluminium or reinforced plastic. Cutting blades are made from high-quality, corrosion-resistant steel alloys for sharpness and wear resistance. Silicon-based photovoltaic cells are used in solar panels for efficient energy capture, protected by durable covers. Wheels and tires are crafted from rubber or reinforced polymers for robust traction. Corrosion-resistant stainless steel or durable plastics ensure longevity in water spraying components. Polycarbonate or ABS plastics protect sensors and electronics, while user interfaces use UV-resistant materials. Safety features employ impact-resistant materials for enhanced durability.
2.1.1 Solar panel
The solar panel is a 10-watt photovoltaic module that serves as the primary energy source for the autonomous agricultural robot. Photovoltaic cells in the panel convert sunlight into electrical energy, which powers the robot’s various systems. The 10-watt rating indicates the panel’s power output under standard test conditions, making it suitable for generating sufficient energy for the robot’s operations during daylight hours. Its design likely includes durable, weather-resistant materials to ensure longevity and consistent performance even in outdoor agricultural settings.
2.1.2 Cutting blade
The cutting mechanism of the robot includes blades that are 12 centimeters in length and made of mild steel. Mild steel, known for its toughness and ease of sharpening, is an excellent choice for cutting applications. Its resilience against bending and breaking under stress ensures that the blades can effectively cut through different types of grass and vegetation. The 12 cm length is ideal for covering a substantial cutting area, balancing the need for efficient grass trimming with the robot’s compact design requirements.
2.1.3 Battery
3.7 V lithium-ion batteries with a 2200 mAh capacity each power the robot. Three cells are connected in series to produce a total output of 11.1 V, which is the voltage needed for the motors. The energy storage capacity of this setup is approximately 24.42 watt-hours (11.1 V × 2.2 Ah). The battery can power the robot for about 3.5 hours in the absence of sunlight, assuming an average power consumption of 6.5 to 7 watts. This setup allows the robot to function during short periods of low light. The battery configuration was chosen to maintain a controllable size and weight while guaranteeing effective operation.
2.1.4 Water tank
The robot features a 1-liter water tank made of durable plastic. This tank is a crucial component of the water spraying system, designed to store and supply water for irrigation. The plastic material ensures that the tank is lightweight, resistant to corrosion, and safe for storing water. With a capacity of 1 liter, the tank provides a manageable amount of water for targeted irrigation, suitable for small to medium-sized areas. The choice of plastic also facilitates easy handling and maintenance.
2.1.5 Base frame
The robot’s base frame is composed of polycarbonate and measures 25.5 cm by 15.5 cm. Because of its exceptional strength, flexibility, and low weight, this material was chosen for outdoor agricultural applications. Strong impact resistance provided by polycarbonate helps shield internal parts from harm when operating on uneven surfaces. Long-term durability in field conditions is also guaranteed by its resistance to moisture and UV rays. Furthermore, polycarbonate is simple to work with, making it possible to mount mechanical and electronic components effectively. Because of these qualities, it is a sensible and dependable option for the robot’s chassis, enhancing performance and safety when cutting and spraying.
2.1.6 DC motor
Five DC motors, each with a 9 V rating, are used by the robot; however, their specifications vary to suit their respective tasks. The wheels are equipped with two motors that provide smooth movement over uneven terrain with a torque of roughly 10–12 kg·cm and a speed of about 100 RPM. With a speed range of 300 to 500 RPM, the cutting blade’s motor produces roughly 6 kg·cm of torque, making it useful for cutting grass. A motor with 200–300 RPM and 2–3 kg·cm torque is used for the spraying system, which is adequate for a constant water flow. Despite having the same voltage, the motors’ torque and speed vary according to their specific functions, guaranteeing the robot’s dependable and effective operation.
2.1.7 Wheels
The wheels of the robot measure 6.5 centimeters in diameter and 2.0 centimeters in width, made from plastic. These dimensions and material choices are tailored to ensure the robot’s mobility and stability across different terrains. Plastic wheels are lightweight, durable, and cost-effective, making them suitable for agricultural environments where they must traverse uneven surfaces and handle exposure to dirt and moisture. The tread design on the wheels likely enhances traction and manoeuvrability, essential for the robot’s autonomous navigation capabilities.
2.1.8 Power budget
Table 1 presents the power budget. The power budget provides the power requirement of the developed system. The average power consumption is 11.35 W.
Table 1. Power budget
|
Component |
Quantity |
Voltage |
Current (est.) |
Power (W) |
Duty Cycle |
Avg. Power Used |
|
DC Motors (Wheels) |
4 |
9 V |
0.5 A each |
18 W |
50% |
9 W |
|
Water Pump |
1 |
6 V–9 V |
0.3 A |
2.5 W |
20% |
0.5 W |
|
Cutting Blade Motor |
1 |
9 V |
0.5 A |
4.5 W |
30% |
1.35 W |
|
Electronics (MCU, sensors, etc.) |
1 set |
3.3 V–5 V |
100 mA |
0.5 W |
100% |
0.5 W |
|
Total Avg. Power Use |
|
|
|
|
|
11.35 W |
2.2 Mechanism
2.2.1 Cutting mechanism
The cutting mechanism in the autonomous robot comprises one or more blades driven by an electric motor powered by solar energy. When activated, the motor rotates the blades, enabling them to cut through grass or other vegetation as the robot traverses the field. The design allows for adjustable cutting height and depth, accommodating various types of grass and terrain conditions. This flexibility ensures that the robot can efficiently manage different mowing tasks, from maintaining a uniform lawn height to tackling denser or taller vegetation in diverse agricultural settings.
2.2.2 Spraying mechanism
The spraying mechanism of the robot includes a liquid reservoir, typically for storing herbicides, pesticides, or fertilizers, alongside a pump and a set of spraying nozzles. Powered by solar energy, the pump pressurizes the liquid, allowing it to be sprayed onto the vegetation through the nozzles. Depending on the robot’s design, the spraying mechanism can be operated manually or automatically. This feature provides targeted and efficient application of treatments, essential for optimizing plant health and growth while minimizing waste and environmental impact.
2.2.3 Control systems
The control systems in the robot are crucial for managing its cutting and spraying operations. These systems handle the activation and deactivation of the cutting and spraying mechanisms and may include sensors to detect obstacles or terrain changes. Advanced safety features are integrated to prevent accidents or damage, ensuring safe operation in agricultural fields. Additionally, the control systems feature user interfaces like buttons, switches, or touchscreens, enabling manual control and configuration. This combination of automated and user-controlled functions enhances the robot’s versatility and ease of use for farmers.
2.3 Design
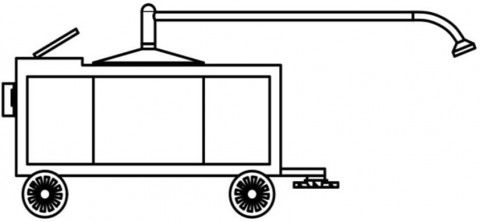
Figure 1 presents a three-dimensional perspective of the proposed robot, highlighting the arrangement and integration of its various components.
The isometric view is essential for visualizing the spatial relationships and alignment of parts, providing a comprehensive understanding of the robot’s overall structure and design. Key components include:
•Solar Panel (Part 1): Positioned at the top, this captures sunlight to generate energy for the robot.
•Sprayer Tank (Part 2): Centrally located, it stores the liquid used for spraying.
•Wheels (Part 3): Four wheels are strategically placed to facilitate mobility and stability across various terrains.
•Cutters (Part 4): Two cutting blades are situated beneath the robot for efficient grass cutting.
•Sprayer (Part 5): This component is designed to precisely spray liquids onto vegetation.
This view is vital for understanding how the robot’s components are assembled and arranged from an overhead perspective.
Figure 1. Isometric view of the model
2.3.1 Back view of the model
The back view diagram presented in Figure 2 focuses on the robot’s rear, detailing the positioning of critical components from behind.
Figure 2. Back view of the model
This perspective is crucial for understanding the layout and accessibility of essential elements such as:
•Arduino (Part 1): Two Arduino boards, likely used for controlling the robot’s functions.
•Battery (Part 2): Two batteries that power the robot, ensuring operation even when solar energy is unavailable.
•DC Motor (Part 3): Five DC motors, which may be used for driving the wheels, cutting blades, and the spraying pump.
This view is key to visualizing how the robot is powered and controlled from the rear side.
2.3.2 Side view
The side view shown in Figure 3 provides a profile perspective of the robot, showing the vertical alignment of its components along its length.
This view is particularly useful for understanding how parts such as the wheels, cutters, and sprayer mechanisms are vertically positioned and integrated. It illustrates how these components are spaced and balanced to ensure the robot’s stability and functionality during operation.
Figure 3. Side view
2.3.3 Top view
Figure 4 presents a top view that offers a plan perspective of the robot, displaying the arrangement of its components.
Figure 4. Top view
This viewpoint is essential for understanding the layout and footprint of the robot’s elements, including the solar panel, sprayer tank, and cutting mechanism. It provides a clear depiction of how these components are distributed across the surface of the robot, which is crucial for grasping the overall design and spatial allocation.
2.3.4 Front view
Figure 5 presents the front view diagram focuses on the robot’s front, highlighting the configuration of front-facing components.
Figure 5. Front view
This perspective is valuable for visualizing how the cutting mechanism approaches the grass and the placement of any front-mounted sensors or control interfaces. It helps in understanding the robot’s operational dynamics from the front.
2.4 Working processes of the developed system
2.4.1 Sprayer
In the solar-powered sprayer, the solar panels harness sunlight and convert it into electrical energy. This energy is managed by an Arduino microcontroller, which oversees various sprayer functions. The Arduino controls tasks such as activating the pump and regulating spray intensity according to pre-set parameters or sensor feedback. This integration of solar power and Arduino technology optimizes the sprayer’s performance and efficiency. The working processes of the system are shown in Figure 6.
Figure 6. Workflow of the sprayer
2.4.2 Cutter
In a system utilizing solar panels and an Arduino-controlled cutter, the design is optimized for effective maintenance operations. The solar panels power a cutting mechanism that is regulated by an Arduino microcontroller. This configuration automates tasks like trimming grass or clearing debris that could hinder the panels’ efficiency. The Arduino processes data from sensors to determine when maintenance activities are necessary based on environmental factors or the performance of the panels. Figure 7 depicts the working of the cutter.
Figure 7. Workflow of the cutter
3.1 Machine performance evaluation
The evaluation of the solar-based agrobot for grass-cutting and water sprinkling involves assessing several critical performance metrics. Solar power conversion efficiency determines how effectively sunlight is transformed into electrical energy, which is essential for sustained operation. The field coverage rate measures the area covered by the agrobot per unit time, indicating its efficiency in completing tasks. Grass-cutting efficiency assesses the effectiveness of the cutting mechanism relative to total grass area, while water sprinkling precision evaluates the accuracy of water distribution to crops. Bluetooth communication reliability ensures seamless remote-control operation and operational time efficiency reflects how efficiently the agrobot operates between charging cycles, which is crucial for continuous field maintenance.
•A 100 square metre test area was used for the performance evaluation, which was conducted in a square field plot that was 10 meters by 10 meters.
•Grass Type: Cynodon dactylon, or Bermuda grass, was used for the tests. During operation, the target cutting height was lowered to 5 cm from the initial 12 to 15 cm of grass.
•Soil Conditions: The loamy soil in the experimental area had a moderate moisture content, making it ideal for tasks involving both cutting and spraying.
•Solar Radiation: During testing, a calibrated light sensor recorded sunlight intensity ranging from 650 to 700 watts per square metre.
•Accuracy of Water Application: Throughout the test plot, a fixed amount of one litre of water was distributed.
•To assess the consistency of the water distribution, graduated measuring containers were positioned at different locations throughout the plot.
•The sprayer also included a flow sensor to record the precise volume delivered while it was in use.
•Area Measurement: Marked boundaries were used to confirm the robot’s operational coverage, guaranteeing complete and consistent coverage of the assigned area.
•Repetition and Reliability: Performance metrics were calculated using the mean values from three repetitions of each functional test (cutting and spraying).
•Operating Time: The solar battery charging time was recorded as three hours, and each activity, grass cutting and spraying, was carried out for one hour per cycle.
The performance evaluation parameters are presented in Eqs. (1)-(5).
Field Coverage Rate (FCR): FCR = (Area Covered / Time) (1)
Grass Cutting Efficiency (GCE): GCE = (Area of Grass Cut / Total Grass Area) × 100% (2)
Water Sprinkling Precision (WSP): WSP = (Accurate Water Delivery / Total Water Delivery) × 100% (3)
Bluetooth Communication Reliability (BCR): BCR = (Successful Commands Received / Total Commands Sent) × 100% (4)
Operational Time Efficiency (OTE): OTE = (Successful Commands Received / Charging Time) × 100% (5)
3.2 Comparative analysis
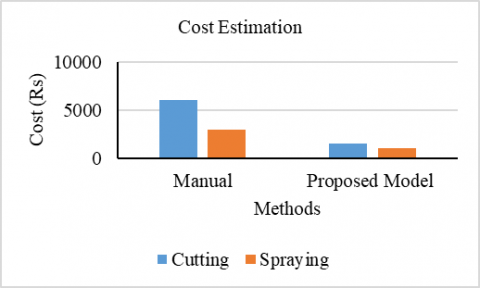
Table 2 outlines the time and labour requirements for manual, machine, and proposed machine harvesting methods across various crops, alongside associated costs. Figures 8 and 9 present the time and cost per acre for different crops using the respective methods. The findings indicate that the proposed machine method yields favourable outcomes compared to manual and traditional machine methods.
Table 2. Comparative study
|
S. No. |
Method |
Technique |
Labours/Acre |
Time Required |
Cost/Acre |
|
1 |
Manual |
Cutting |
8–11 |
30 hrs |
4000–5500 |
|
Spraying |
4–6 |
8 hrs |
2000–3000 |
||
|
2 |
Proposed Model |
Cutting |
2–3 |
10 hrs |
1000–1500 |
|
Spraying |
1–2 |
3 hrs |
500–1000 |
Figure 8. Time required for different methods
Figure 9. Cost estimation of different methods
Figure 10. Labour required for different methods
Figure 10 illustrates the labour required per acre for each crop using these methods. Meanwhile, Graphical representations depicting the outcomes of various methods concerning similar parameters such as time, the number of labourers required, and the associated costs per acre are presented in Figure 8-10.
Figure 8 illustrates the overall time performance of both cutting and spraying in our proposed model. From this graph, it is evident that time is effectively managed, allowing for a shorter period to complete the tasks. Additionally, when compared to the manual methods of both operations, the proposed method demonstrates significantly shorter operation times.
Figure 9 illustrates the cost estimation of both cutting and spraying in our proposed model. From this graph, the cost estimation for both cutting and spraying operations under the proposed model reveals substantial savings compared to manual methods, attributed to increased efficiency and reduced resource utilization.
Figure 10 illustrates the labour performance of both cutting and spraying in our proposed model. From this graph, the proposed model drastically reduces the required labour for both cutting and spraying tasks compared to manual methods, optimizing resource allocation and increasing productivity.
The FCR is 100 square meters per hour, representing the efficiency of the robot in covering a designated field area within a given time. This metric provides valuable insights into the operational effectiveness of the agrobot.
FCR = 100 m2 / hour (6)
The GCE is approximately 90.91%, indicating that the robot effectively cut around 91% of the targeted grass area. This metric reflects the precision and efficiency of the agrobot in grass cutting operations.
GCE = (100 m2 / 110 m2) × 100% ≈ 90.91% (7)
The WSP is 100%, signifying perfect accuracy in delivering water to the crops. This result suggests that the agrobot successfully delivered the intended amount of water without any wastage.
WSP = (1 litre / 1 litre) × 100% = 100% (8)
The OTE is approximately 33.33%, indicating that the robot is operational for about one-third of the time between solar charging cycles. This metric helps assess the efficiency of the agrobot in utilizing solar energy for sustained operation.
OTE = (1 hour / 3 hours) × 100% ≈ 33.33% (9)
The high SPCE value may indicate either a measurement anomaly or an unexpected efficiency in energy conversion. The FCR and GCE values reflect the agrobot’s effectiveness in field coverage and precise grass cutting, while a perfect WSP confirms accurate water delivery for efficient irrigation. However, the low BCR suggests the need for improvements in Bluetooth communication to enhance reliability. Additionally, the anomalous EAR value warrants further investigation into calculation accuracy and the robot’s solar-powered functionality. The OTE metric sheds light on the agrobot’s efficiency in utilizing solar energy for sustained operation. Overall, this analysis offers a comprehensive assessment of the agrobot’s performance, identifying both strengths and areas for enhancement.
A number of difficulties were found when the solar-powered agrobot was being developed and tested. One significant drawback was the limited operating time brought on by the small battery capacity and the comparatively sluggish solar charging process, which required up to three hours of charging for an hour of use. This made it less useful in low light levels. Another problem was communication; the Bluetooth module would sometimes lose contact, especially when travelling long distances or in obstructed areas. This underscored the need for more reliable options like Wi-Fi or LoRa. Additionally, the robot was susceptible to damage on uneven terrain due to the use of glass for the base frame, despite its structural soundness; polycarbonate or aluminium could improve durability. Additionally, cutting performance on tall or dense grasses varied, suggesting the need for more powerful motors or adjustable blade mechanisms.
A number of enhancements are suggested in order to get past these obstacles. Including higher-capacity lithium-ion batteries and maximum power point tracking (MPPT) would increase operational time and improve energy efficiency. Autonomous navigation would be enhanced by the addition of path correction algorithms and obstacle detection sensors, like infrared or ultrasonic. Furthermore, a modular hardware approach would improve the robot’s adaptability and ease of maintenance for various farming tasks by allowing parts like the cutting or spraying units to be readily upgraded or detached.
By automating important agricultural tasks, the solar-powered agrobot designed for watering and cutting grass represents a significant advancement in sustainable farming practices. With a field coverage rate of 100 m²/hour, a grass cutting efficiency of 90.91%, and flawless water delivery accuracy, it proved to be a powerful tool that supported notable labour, time, and operational cost savings. Its efficacy is confirmed by these results, which match the performance metrics that were recorded. A low operational time efficiency of 33.33% was one of the limitations found during testing, though, and it emphasises the need for better energy management and battery capacity. Furthermore, the glass base frame raised questions regarding durability on uneven terrain, and the Bluetooth-based communication system occasionally displayed unreliability. Its dependability and adaptability can be increased in subsequent iterations by addressing these problems—through improved materials, improved communication systems, and cutting-edge energy solutions—making it appropriate for larger farms and a range of crop conditions while also promoting more sustainable and effective agricultural practices.
By incorporating cutting-edge technologies, future iterations of the agrobot can be greatly improved. The application of artificial intelligence (AI) to enable real-time decision-making based on sensor data would be one significant advancement. This might enable the robot to independently modify its functions, like changing the height of the cut or the amount of spray, based on the conditions of the crop. Enhancing movement accuracy and obstacle avoidance, particularly in complex or irregular field layouts, would be possible by incorporating smart navigation systems that use GPS, computer vision, or SLAM.
Modular tools for other agricultural tasks like fertiliser application, weeding, and seed sowing can also increase the robot’s versatility. Throughout the farming cycle, farmers would be able to utilise the same platform for a variety of tasks thanks to these interchangeable attachments. Operational duration and efficiency would be increased by upgrading the energy system with MPPT technology, solar tracking panels, and larger-capacity batteries.
Additionally, incorporating IoT capabilities would enable remote control and monitoring via a dashboard or mobile app, providing farmers with real-time data and alerts. By improving weather resistance and incorporating environmental sensors, the robot would be better equipped to respond appropriately to shifting environmental factors like temperature, humidity, and rainfall. When combined, these improvements would make the agrobot a knowledgeable, dependable, and multipurpose farming helper.
[1] Lajnef, T., Abid, S., Ammous, A. (2013). Design and simulation of photovoltaic water pumping system. International Journal of Engineering and Advanced Technology, 2(4): 161-164.
[2] Thakur, A.K., Singh, R., Gehlot, A., Kaviti, A.K., Aseer, R., Suraparaju, S.K., Natarajan, S.K., Sikarwar, V.S. (2022). Advancements in solar technologies for sustainable development of agricultural sector in India: A comprehensive review on challenges and opportunities. Environmental Science and Pollution Research, 29(29): 43607-43634. https://doi.org/10.1007/s11356-022-20133-0
[3] Chikh, M., Mahrane, A., Chikouche, A. (2008). A proposal for simulation and performance evaluation of stand-alone PV systems. In 23rd European Photovoltaic Solar Energy Conference and Exhibition, Valencia, Spain, pp. 3579-3584.
[4] Nair, P.S., Sushil, A., Nair, R.K., Nair, V.T., Prasad, K., Basith, A., Gopakumar, U. (2020). Design and fabrication of solar powered floating pump. American International Journal of Research in Science, Technology, Engineering & Mathematics, 19(1): 1-7.
[5] Mukherjee, P., Sengupta, T.K. (2020). Design and fabrication of solar-powered water pumping unit for irrigation system. In Computational Advancement in Communication Circuits and Systems: Proceedings of ICCACCS 2018, pp. 89-102. https://doi.org/10.1007/978-981-13-8687-9_9
[6] Venkatasiva, K., Naik, K.B. (2017). Fabrication of solar augmented automatic water level sensing and water pumping system for irrigation. International Journal of Scientific Engineering and Technology Research, 6(4): 603-606. https://ijsetr.com/uploads/421536IJSETR13601-106.pdf.
[7] Apat, S.K., Mishra, J., Raju, K.S., Padhy, N. (2022). A study on smart agriculture using various sensors and agrobot: A case study. In Smart Intelligent Computing and Applications. Springer, Singapore, pp. 531-540. https://doi.org/10.1007/978-981-16-9669-5_48
[8] Gutiérrez-Cejudo, J., Lujak, M., Fernández, A. (2023). Agrobots architecture and Agrobots-SIM simulator for dynamic agri-robot coordination. In International Conference on Practical Applications of Agents and Multi-Agent Systems, Guimaraes, Portugal, pp. 5-17. https://doi.org/10.1007/978-3-031-37593-4_1
[9] Canavari, M., Medici, M., Rossetti, G. (2022). Agricultural robots classification based on clustering by features and function. In Proceedings of the 15th International Conference on Precision Agriculture, pp. 1-8.
[10] Ramani, D.R., Rachna, P., Pavan, G., Reddy, R., Huzaifa, M. (2023). Agrobot: Agricultural robot using IoT and machine learning (ML). In 2023 3rd International Conference on Smart Data Intelligence (ICSMDI), Trichy, India, pp. 497-500. http://doi.org/10.1109/ICSMDI57622.2023.00094
[11] Kabir, E., Kumar, P., Kumar, S., Adelodun, A.A., Kim, K.H. (2018). Solar energy: Potential and future prospects. Renewable and Sustainable Energy Reviews, 82: 894-900. https://doi.org/10.1016/j.rser.2017.09.094
[12] Poonia, S., Jain, D., Santra, P., Singh, A.K. (2018). Use of solar energy in agricultural production and processing. Indian Farming, 68(9): 104-107.
[13] Jalu, M.V., Yadav, R., Ambaliya, P.S. (2023). A comprehensive review of various types of sprayers used in modern agriculture. The Pharma Innovation Journal, 12(4): 143-149.
[14] Jamshidi, M., Hatch, A., Lowery, A.D., Smith, J.E. (2017). The future of solar energy. International Journal of Contemporary Energy, 3(2): 8-15. https://doi.org/10.14621/ce.20170202
[15] Marwan, A., Simic, M., Imad, F. (2017). Calibration method for articulated industrial robots. Procedia Computer Science, 112: 1601-1610. https://doi.org/10.1016/j.procs.2017.08.246
[16] Huang, B.J., Lin, T.H., Hung, W.C., Sun, F.S. (2001). Performance evaluation of solar photovoltaic/thermal systems. Solar Energy, 70(5): 443-448. https://doi.org/10.1016/S0038-092X(00)00153-5
[17] Kulhariya, S.K., Tomer, A.S., Krishan, K., Yadav, N.K., Mishra, R.K. (2020). Performance evaluation of solar operated bidirectional grass cutter. Journal of Pharmacognosy and Phytochemistry, 9(3): 329-334.
[18] Dalal, M.S.S., Sonune, M.V.S., Gawande, M.D.B., Sharad, M., Shere, B., Wagh, M.S.A. (2016). Manufacturing of solar grass cutter. In National Conference “CONVERGENCE 2016”, pp. 352-355.
[19] Palve, S.V., Panchal, K., Chipkar, R., Patil, A., Sonawane, G.L. (2016). Solar powered automated grass cutter machine. International Research Journal of Engineering and Technology, 5(4): 576-580.
[20] Pushpak, V. (2023). Design and mathematical modeling of solar grass cutter. Materials Today: Proceedings. https://doi.org/10.1016/j.matpr.2023.02.270
[21] Ramya, E., Anand, J., Devi, R.R., Issac, N.A., Prasenth, K.R. (2021). Solar grass cutter with water spraying vehicle. In 2021 International Conference on Advancements in Electrical, Electronics, Communication, Computing and Automation (ICAECA), Coimbatore, India, pp. 1-6. https://doi.org/10.1109/ICAECA52838.2021.9675681
[22] Ismail, F.B., Al-Muhsen, N.F., Fuzi, F.A., Zukipli, A. (2019). Design and development of smart solar grass cutter. International Journal of Engineering and Advanced Technology, 9(2): 4137-4141. https://doi.org/10.35940/ijeat.B4920.129219
[23] Issa, W.A., Abdulmumuni, B., Azeez, R.O., Fanifosi, J.O., OB, O. (2020). Design, fabrication, and testing of a movable solar operated sprayer for farming operation. International Journal of Mechanical Engineering and Technology, 11(3): 6-14.
[24] Emmi, L., Gonzalez-de-Soto, M., Pajares, G., Gonzalez-de-Santos, P. (2014). New trends in robotics for agriculture: Integration and assessment of a real fleet of robots. The Scientific World Journal, 2014(1): 404059. https://doi.org/10.1155/2014/404059
[25] Stočes, M., Vaněk, J., Masner, J., Pavlík, J. (2016). Internet of Things (IoT) in agriculture-selected aspects. Agris On-Line Papers in Economics and Informatics, 8(1): 83-88. http://doi.org/10.22004/ag.econ.233969
[26] Dagar, R., Som, S., Khatri, S.K. (2018). Smart farming–IoT in agriculture. In 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, pp. 1052-1056. https://doi.org/10.1109/ICIRCA.2018.8597264
[27] Sontakke, S.S., Wanjari, P.C., Kalbande, S.I., Meshram, S.R., Dhumal, V.M. (2020). Solar powered pesticide sprayer using IoT. International Research Journal of Modernization in Engineering Technology and Science, 2(6): 408-412.
[28] Ghafar, A.S.A., Hajjaj, S.S.H., Gsangaya, K.R., Sultan, M.T.H., Mail, M.F., Hua, L.S. (2023). Design and development of a robot for spraying fertilizers and pesticides for agriculture. Materials Today: Proceedings, 81(2): 242-248. https://doi.org/10.1016/j.matpr.2021.03.174
[29] Imran, M., Tufail, M., Mo, C., Wahab, S., Khan, M.K., Hoo, W.C., Ling, Z. (2025). From resources to resilience: Understanding the impact of standard of living and energy consumption on natural resource rent in Asia. Energy Strategy Reviews, 57: 101590. https://doi.org/10.1016/j.esr.2024.101590
[30] Tilahun, A.A., Desta, T.W., Salau, A.O., Negash, L. (2023). Design of an adaptive fuzzy sliding mode control with neuro-fuzzy system for control of a differential drive wheeled mobile robot. Cogent Engineering, 10(2): 2276517. https://doi.org/10.1080/23311916.2023.2276517
[31] Ashagrie, A., Salau, A.O., Weldcherkos, T. (2021). Modeling and control of a 3-DOF articulated robotic manipulator using self-tuning fuzzy sliding mode controller. Cogent Engineering, 8(1): 1950105. https://doi.org/10.1080/23311916.2021.1950105