Pankaj Dumka*![]() | Darshana Dave
| Darshana Dave![]() | Chandrakant Sonawane
| Chandrakant Sonawane![]() | Arun Bongale
| Arun Bongale![]() | Choon Kit Chan
| Choon Kit Chan![]() | Ghanshyam Tejani
| Ghanshyam Tejani![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This article presents a detailed simulation approach for analyzing the equilibrium of coplanar and non-concurrent force systems by using Python programming. Coplanar forces are the forces that lie within the same plane, while non-concurrent forces do not intersect at a common point, creating complex systems which are often encountered in engineering fields such as structural analysis and statics. This study develops a set of Python functions to compute resultant forces, evaluate support reactions, and simulate equilibrium conditions in such force systems. The methodology involves defining force magnitudes, directions, and positions in the code, thus enabling automated calculation of equilibrium parameters through matrix operations (linear algebra) and iterative methods. Ten standard engineering problems have been selected to examine and test the functions, with results showing high accuracy when compared with the established solutions in the existing literature. This work highlights Python's effectiveness as a computational tool for both educational and practical applications in equilibrium studies.
static equilibrium, Python programming, coplanar forces system, non-coplanar forces, inclusive innovation
Studying the forces and their effects on the physical systems is a basis of engineering and physics. In particular, the analysis of coplanar and non-concurrent forces is important for understanding the behaviour of objects subjected to multiple forces which do not intersect at a common point [1, 2]. This introduction sets the stage for a comprehensive search of the theoretical and practical aspects of simulating the resultant and equilibrium of coplanar and non-concurrent forces using Python, which is a versatile and widely-used programming language.
For centuries, scientists and engineers have faced with the fundamental question of how forces interact with the objects and structures. This question forms the basis of classical mechanics, a branch of physics that deals with the motion and equilibrium of physical bodies. In this quest, the concept of a "force" emerged as a fundamental object that causes a body to change its state of motion or rest. Forces can result from interactions such as gravity, contact, tension, compression, and more, making them a central concept in understanding the behaviour of physical systems [1-3].
When several forces act on an object, the net effect of these forces becomes a critical consideration. Coplanar forces are the subset of forces that all lie within the same plane. However, the term "non-concurrent" means that these forces do not share a common point of intersection. This property separates them from concurrent forces, where lines of action meet at a single point. The study of coplanar and non-concurrent forces becomes particularly relevant when studying the stability and equilibrium of structures, determining the net effect of various loads, and designing components that can survive multiple forces [3-5].
Knowing and modelling the resultant and equilibrium of coplanar and non-concurrent forces have great effects in various scientific and engineering fields. The significance of this study can be summarised as follows [6]:
Conventionally, simulating the coplanar and non-concurrent forces has been depend on the analytical techniques, graphical methods, or specialized software, each with its own advantages and limitations [21, 22]. Analytical methods, i.e., the resolution of forces into components and the use of equilibrium equations, gives exact solutions but they can be time-consuming and challenging to use on the complex systems with several forces. Graphical methods, like the force polygon or funicular polygon, offer a more visual approach but they are less precise, particularly for systems with many forces or when they are used in educational settings [23, 24]. While specialized software packages in structural engineering and mechanics, such as MATLAB or finite element analysis tools, offer powerful solutions, they often require advanced knowledge and are not universally accessible [25, 26]. The proposed Python-based approach aims to bridge these gaps by offering a cost-effective, accessible, and versatile alternative that simplifies the simulation process. Python’s ease of use (also no license is required to use it), coupled with its powerful numerical libraries like NumPy, enables engineers, educators, and students to efficiently calculate force resultants, simulate equilibrium states, and visualize complex force interactions. This approach enhances both educational engagement and practical applications, particularly in environments where traditional software may not be readily available.
The primary objectives of this study are to provide an in-depth understanding of the theoretical underpinnings of coplanar non-concurrent forces, including the calculation of the resultant force and the principles of equilibrium, demonstrate how Python, a popular and versatile programming language, can be used to simulate and calculate the resultant and equilibrium of coplanar non-concurrent forces, to highlight the practical applications of this knowledge in fields such as structural engineering and mechanical design.
While this article aims to provide a comprehensive overview of the subject, it is essential to acknowledge its limitations. The scope of this article primarily covers the analysis of coplanar non-concurrent forces in a two-dimensional plane. Also, the beams analysed are determinate and indeterminate beams have not been considered. More complex three-dimensional force systems, dynamics, and considerations such as friction and material properties are beyond the scope of this article.
Learning forces and their effects on physical systems is a fundamental thing in the field of engineering and physics. Coplanar and non-concurrent forces (which are the specific class of forces) are the focus of this article. These forces share the property of acting in the same plane but do not intersect at a common point [2]. Understanding the calculation principles behind the resultant forces and their equilibrium is central in numerous engineering applications, such as structural analysis and mechanical design. In the context of structural engineering and the analysis of beams, the principles related to coplanar and non-concurrent forces take on particular significance. Beams, whether cantilevered or simply supported, are critical components of various structures, and understanding how forces act on them is necessary for confirming structural stability and performance [27]. This section will elaborate on the theoretical concepts of coplanar non-concurrent forces, providing a deeper insight into the mathematical principles underpinning their analysis.
The concept of the resultant force is important to understand the net effect of multiple forces acting on a system. For a system the resultant force is the single force that produces the same effect as the original forces combined when applied at the appropriate point [28]. To determine the resultant force, vector addition is employed, a mathematical method that considers both the magnitude and direction of forces.
In this article (in Python formulation), forces are treated as vectors, which are mathematical entities that have both magnitude and direction. An arrow usually represents a vector and can be expressed in the form: F=[HV], where, H represents the horizontal component and V represents the vertical component of the forece F.
For a system of non-concurrent forces, each force is represented as a vector, and all vectors are considered in the same plane, simplifying the analysis. The vector addition allows us to find the resultant force vector, which, when clubbed with the following steps, will lead to support reactions and moments [1, 3, 6]:
2.1 Common type of loadings
In structural engineering, various types of loads come upon, each of which exerts different forces on a structure. Understanding and analysing these loads is necessary for designing safe and efficient structures. Here are some commonly seen loadings [4, 6, 27]:
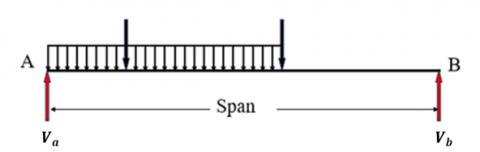
Figure 1 shows these loads from the point of view of a simply supported beam (the same holds for the cantilever as well). Engineers must consider the effects of these various loadings during the design and analysis of buildings, bridges, and other structures to ensure they can safely support the forces they encounter. By understanding and appropriately accounting for these loads, engineers can create safe, efficient and durable structures.
Figure 1. Different types of loads acting on a simply supported beam
2.2 Commonly used beams
In this article, the statically determinate beams are considered as these beams are the ones in which all reaction components can be obtained with the help of above-mentioned equilibrium conditions.
Figure 2. A typical cantilever beam
(a) Simply supported beam
(b) One end fixed and the other on roller
Figure 3. Typical simply supported beams
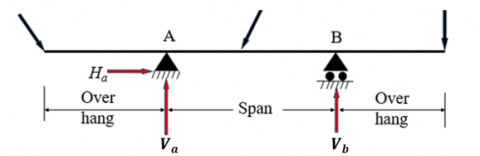
(a) Single overhang
(b) Double overhang
Figure 4. Typical schematic of overhanging beams
2.3 Reaction calculations
Cantilever beams
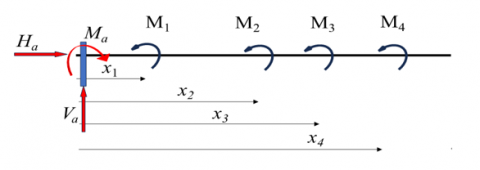
Figure 5. Point loads acting on the cantilever
$V_a=\sum_{i=1}^{i=n} F_i \sin \left(\theta_i\right)$ (1)
$H_a=\sum_{i=1}^{i=n} F_i \cos \left(\theta_i\right)$ (2)
$M_a=\sum_{i=1}^{i=n}\left(F_i \sin \left(\theta_i\right) \times x_i\right)$ (3)
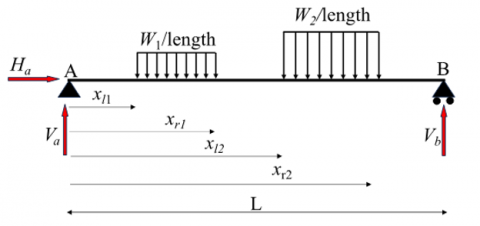
Figure 6. UDL acting on cantilever
$V_a=\sum_{i=1}^{i=n} W_i\left(x_{r i}-x_{l i}\right)$ (4)
$H_a=0$ (5)
$M_a=\sum_{i=1}^{i=n} W_i\left(x_{r i}-x_{l i}\right)\left(x_{r i}+x_{l i}\right) / 2$ (6)
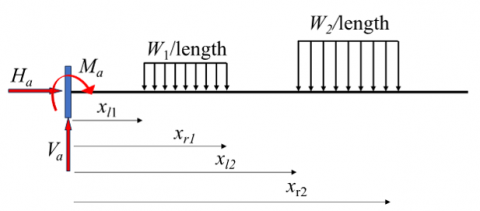
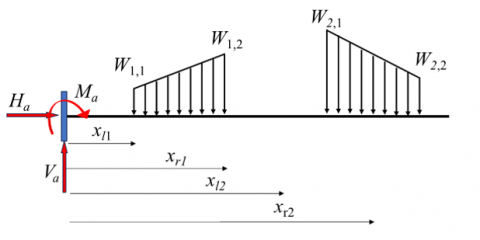
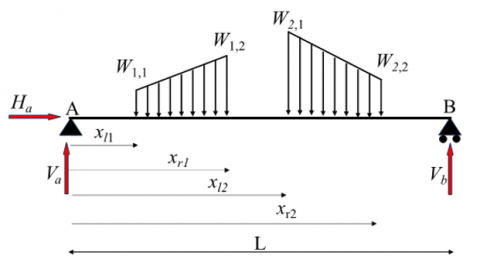
Figure 7. UVL acting on the cantilever
$V_a=\sum_{i=1}^{i=n}\left(\frac{1}{2}\right)\left(W_{i, 1}+W_{i, 2}\right)\left(x_{r i}-x_{l i}\right)$ (7)
$H_a=0$ (8)
$M_a=\sum_{i=1}^{i=n}\left(\frac{1}{2}\right)\left(W_{i, 1}+W_{i, 2}\right)\left(x_{r i}-x_{l i}\right) \times \ell_i$ (9)
Case-I: The left end load of UVL is lower than the right load
$\ell_i=\left(x_{l i}+\left(x_{r i}-x_{l i}\right)\left(1-\frac{W_{i, 2}+2 W_{i, 1}}{W_{i, 1}+W_{i, 2}} \times \frac{1}{3}\right)\right)$ (10)
Case-II: The right end load of UVL is lower than left load
$\ell_i=\left(x_{l i}+\frac{\left(x_{r i}-x_{l i}\right)}{3}\left(\frac{W_{i, 1}+2 W_{i, 2}}{W_{i, 1}+W_{i, 2}}\right)\right)$ (11)
Figure 8. External moments acting on cantilever
$V_a=0$ (12)
$H_a=0$ (13)
$M_a=\sum_{i=1}^{i=n} M_i$ (14)
Simply supported beam
In case of simply supported beam as the moment at the reactions is zeros so in the calculations they are not been taken into account.
$V_b=\frac{1}{L} \sum_{i=1}^{i=n}\left(F_i \sin \left(\theta_i\right) \times x_i\right)$ (15)
$H_a=\sum_{i=1}^{i=n} F_i \cos \left(\theta_i\right)$ (16)
$V_a=\sum_{i=1}^{i=n} F_i \sin \left(\theta_i\right)-V_b$ (17)
Figure 9. Point loads acting on simply supported beam
Figure 10. UVL acting on simply supported beam
$V_b=\left(\frac{1}{2 L}\right) \sum_{i=1}^{i=n}\left(W_{i, 1}+W_{i, 2}\right)\left(x_{r i}-x_{l i}\right) \times \ell_i$ (18)
$H_a=0$ (19)
$V_a=\left(\frac{1}{2}\right) \sum^{i=n}\left(W_{i, 1}+W_{i, 2}\right)\left(x_{r i}-x_{l i}\right)-V_b$ (20)
For $\ell_i$, Eqs. (10) and (11) will be used.
Figure 11. UDL acting on simply supported beam
$V_b=\left(\frac{1}{2 L}\right) \sum_{i=1}^{i=n} W_i\left(x_{r i}-x_{l i}\right)\left(x_{r i}+x_{l i}\right)$ (21)
$H_a=0$ (22)
$V_a=\sum_{i=1}^{i=n} W_i\left(x_{r i}-x_{l i}\right)-V_b$ (23)
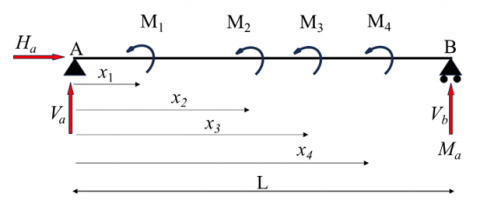
Figure 12. External moments acting on simply supported beam
$V_b=\left(\frac{1}{L}\right) \sum_{i=1}^{i=n} M_i$ (24)
$H_a=0$ (25)
$V_a=-V_b$ (26)
Point to be noted in all the above calculations is that downward loading is considered as positive. All the angles are measured counter-clock wise. For cantilever the x coordinate starts at fixed end whereas, for simply supported beam it will start from left support.
To simulate the resultant and equilibrium of coplanar non-concurrent forces in Python the NumPy library/module has been used [29-33]. The solution of the above functions is based on the following assumptions:
The Python functions presented in this section are designed to simulate the equilibrium conditions of coplanar and the non-concurrent forces in cantilever and simply supported beams, under various loading scenarios. The code was developed to be flexible and modular, allowing for the analysis of point loads, point moments, uniformly distributed loads (UDL), and uniformly varying loads (UVL) applied to both cantilever and simply supported beams. Each function takes in specific arguments that correspond to the forces, positions, and angles as defined in the problem diagrams.
The primary package used in the development of these functions is NumPy, which provides efficient array operations and mathematical functions. Particularly, array() is used to handle the input data, and sum() is used for summing up the forces and moments. For the angular calculations, the radians() function is used to convert the input angles from degrees to radians for accurate trigonometric functions, such as sine and cosine.
Functions for cantilever beam
|
def canti_pl(w,θ,x): """ function to evaluate the reaction and moment at the fixed end of a cantilever beam with point loads. Fixed end is considered as 'A'.
Input: list of load (a) magnitudes (b) angle (c) position Output: Reaction (Va, Ha) and moment (Ma) at the free end """ w=array(w) θ=array(θ) x=array(x)
θ=radians(θ) Va=sum(w[:]*sin(θ[:])) Ha=sum(w[:]*cos(θ[:])) Ma=sum(w[:]*sin(θ[:])*x[:]) return array([Va,Ha,Ma]) def canti_mom(M,x): """ function to evaluate the reaction and moment at the fixed end of a cantilever beam with point moments. Fixed end is considered as 'A'.
Input: list of (a) moments (b) moment position Output: Reaction (Va, Ha) and moment (Ma) at the free end """ M=array(M) x=array(x)
Va=0.0 Ha=0.0 Ma=sum(M[:]) return array([Va,Ha,Ma]) def canti_udl(w,x): """ function to evaluate the reaction and moment at the fixed end of a cantilever beam with udl. Fixed end is considered as 'A'.
Input: list of udl (a) magnitudes (b) position Output: Reaction (Va, Ha) and moment (Ma) at the free end """ w=array(w) x=array(x)
Va=sum(w[:]*(x[:,1]-x[:,0])) Ha=0.0 Ma=sum(w[:]*(x[:,1]-x[:,0])*(x[:,1]+x[:,0])/2.0) return array([Va,Ha,Ma]) def canti_uvl(w,x): """ function to evaluate the reaction and moment at the fixed end of a cantilever beam with uvl. Fixed end is considered as 'A'.
Input: list of uvl (a) magnitudes (b) position Output: Reaction (Va, Ha) and moment (Ma) at the free end """ w=array(w) x=array(x)
Va=sum(0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0]))) Ha=0.0
m=empty(shape(w)[0])
if (w[:,0]<w[:,1]).all(): b=w[:,0] a=w[:,1] la=x[:,0]+(x[:,1]-x[:,0])*(1-(a+2*b)/(3*(a+b))) m[:]=0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0]))*la else: a=w[:,0] b=w[:,1] la=x[:,0]+(x[:,1]-x[:,0])*(a+2*b)/(3*(a+b)) m[:]=0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0]))*la
Ma=sum(m) return array([Va,Ha,Ma]) |
Functions for simply supported beam
|
def ssb_pl(w,θ,x,L): """ function to evaluate the reactions at the ends of a simply supported beam with point loads. End 'A' is considered as pin joint and 'B' is roller.
Input: list of load (a) magnitudes (b) angle (c) position & (d) length of beam. Output: Reactions (Va, Ha, Vb) """ w=array(w) θ=array(θ) x=array(x)
θ=radians(θ) Vb=sum(w[:]*sin(θ[:])*x[:])/L Va=sum(w[:]*sin(θ[:]))-Vb Ha=sum(w[:]*cos(θ[:]))
return array([Va,Vb,Ha]) def ssb_udl(w,x,L): """ function to evaluate the reaction at the ends of a simply supported beam with udl. End 'A' is considered as pin joint and 'B' is roller. Input: list of udl (a) magnitudes (b) positions & (c) length of beam. Output: Reaction (Va, Ha, Vb) """ w=array(w) x=array(x)
Vb=sum(w[:]*(x[:,1]-x[:,0])*(x[:,1]+x[:,0])/2.0)/L Va=sum(w[:]*(x[:,1]-x[:,0]))-Vb Ha=0.0
return array([Va,Vb,Ha]) def ssb_uvl(w,x,L): """ function to evaluate the reaction at the ends of a simply supported beam with uvl. End 'A' is considered as pin joint and 'B' is roller.
Input: list of uvl (a) magnitudes (b) positions & (c) length of beam. Output: Reaction (Va, Ha, Vb) """ w=array(w) x=array(x)
m=empty(shape(w)[0])
if (w[:,0]<w[:,1]).all(): b=w[:,0] a=w[:,1] la=x[:,0]+(x[:,1]-x[:,0])*(1-(a+2*b)/(3*(a+b))) m[:]=0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0]))*la else: a=w[:,0] b=w[:,1] la=x[:,0]+(x[:,1]-x[:,0])*(a+2*b)/(3*(a+b)) m[:]=0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0]))*la
Vb=sum(m)/L
Va=sum(0.5*((w[:,0]+w[:,1])*(x[:,1]-x[:,0])))-Vb
Ha=0.0
return array([Va,Vb,Ha]) def ssb_mom(M,x,L): """ function to evaluate the reaction at the ends of a simply supported beam with point moments. End 'A' is considered as pin joint and 'B' is roller.
Input: list of moment (a) magnitudes (b) positions & (c) length of beam. Output: Reactions (Va, Ha, Vb) """ M=array(M) x=array(x)
Vb=sum(M[:])/L Va=-Vb Ha=0.0 return array([Va,Vb,Ha]) |
While using the above functions one has to be very carefully pass the arguments. Table 1 will help the user to supply the inputs in a proper format.
Table 1. Functions and their arguments
|
S. No. |
Function |
Arguments |
|
1 |
canti_pl(w,θ,x) |
With respect to the Figure 5: $w=\left[F_1, F_2, F_3, F_4\right]$ $\theta=\left[\theta_1, \theta_2, \theta_3, \theta_4\right]$ $x=\left[x_1, x_2, x_3, x_4\right]$ |
|
2 |
canti_mom(M,x): |
With respect to the Figure 8: $M=\left[M_1, M_2, M_3, M_4\right]$ $x=\left[x_1, x_2, x_3, x_4\right]$ |
|
3 |
canti_udl(w,x) |
With respect to the Figure 6: $w=\left[W_1, W_2\right]$ $x=\left[\left[x_{l 1}, x_{r 1}\right],\left[x_{l 2}, x_{r 2}\right]\right]$ |
|
4 |
canti_uvl(w,x) |
With respect to the Figure 7: $w=\left[\left[W_{1,1}, W_{1,2}\right],\left[W_{2,1}, W_{2,2}\right]\right]$ $x=\left[\left[x_{l 1}, x_{r 1}\right],\left[x_{l 2}, x_{r 2}\right]\right]$ |
|
5 |
ssb_pl(w,θ,x,L) |
With respect to the Figure 9: $w=\left[F_1, F_2, F_3, F_4\right]$ $\theta=\left[\theta_1, \theta_2, \theta_3, \theta_4\right]$ $x=\left[x_1, x_2, x_3, x_4\right]$ $L=L$ |
|
6 |
ssb_udl(w,x,L) |
With respect to the Figure 11: $w=\left[W_1, W_2\right]$ $x=\left[\left[x_{l 1}, x_{r 1}\right],\left[x_{l 2}, x_{r 2}\right]\right]$ $L=L$ |
|
7 |
ssb_uvl(w,x,L) |
With respect to the Figure 10: $w=\left[\left[W_{1,1}, W_{1,2}\right],\left[W_{2,1}, W_{2,2}\right]\right]$ $x=\left[\left[x_{l 1}, x_{r 1}\right],\left[x_{l 2}, x_{r 2}\right]\right]$ $L=L$ |
|
8 |
ssb_mom(M,x,L) |
With respect to the Figure 12: $M=\left[M_1, M_2, M_3, M_4\right]$ $x=\left[x_1, x_2, x_3, x_4\right]$ $L=L$ |
To test the developed Python functions, ten typical problems were chosen based on their significance to practical applications in structural and mechanical engineering. These problems include a variety of force systems with different magnitudes, directions, and points of application, demonstrating common situations encountered in structural analysis and mechanical design. The selection was made to cover a wide range of difficulties, from simple two-force systems to more complex multi-force equilibria. This diversity ensured that the functions could be evaluated across different levels of difficulty and their applicability to real-world engineering problems.
In this section all the Python functions developed above are tested against different types of loadings on cantilever and simply supported beams.
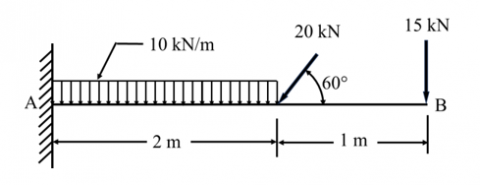
Example 1: For the cantilever beam shown below in Figure 13, evaluate the fixed end reactions:
Figure 13. Cantilever beam with UDL and point load
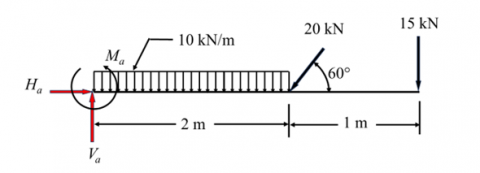
Solution: Figure 14 represents the forces, reactions and moments acting on the beam shown in Figure 13.
Figure 14. FBD
This problem has two types of loads viz. point load and udl. The functions used are: canti_pl (w,θ,x) and canti_udl (w,θ,x). The program to call the functions and its output is as follows:
|
Program |
|
Va,Ha,Ma=canti_pl([15,20],[90,60],[3,2])+canti_udl([10],[[0,2]]) print(f"Va= {round(Va,3)}, Ha ={round(Ha,3)}, Ma = {round(Ma,3)}") |
|
Output |
|
Va= 52.321, Ha =10.0, Ma = 99.641 |
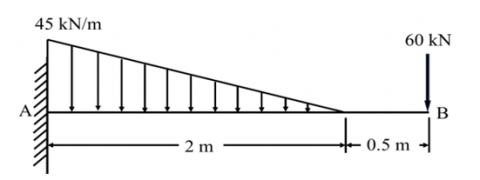
Example 2: For the cantilever beam shown below in Figure 15, evaluate the fixed end reactions:
Figure 15. Cantiler beam with UVL and point load
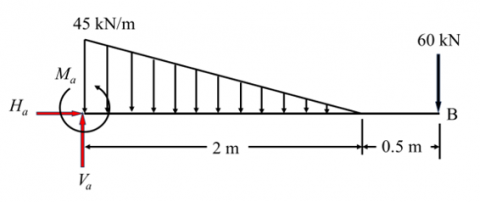
Solution: Figure 16 represents the forces, reactions and moments acting on the beam shown in Figure 15.
Figure 16. FBD
This problem has two types of loads viz. point load and uvl. The functions used are: canti_pl (w,θ,x) and canti_uvl (w,θ,x). The program to call the functions and its output is as follows:
|
Program |
|
Va,Ha,Ma=canti_pl([60],[90],[2.5])+canti_uvl([[45,0]],[[0,2]]) print(f"Va= {round(Va,3)}, Ha ={round(Ha,3)}, Ma = {round(Ma,3)}") |
|
Output |
|
Va= 105.0, Ha =0.0, Ma = 180.0 |
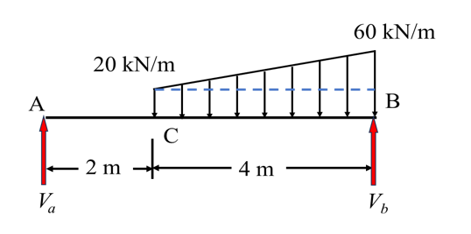
Example 3: For the simply supported beam shown below in Figure 17, evaluate the reactions at the end:
Figure 17. Cantilever beam with UVL
Solution: Figure 18 represents the forces and reactions acting on the beam shown in Figure 17.
Figure 18. FBD
This problem has only uvl. The functions used is: ssb_uvl (w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
w=[[20,60]] x=[[2,6]] L=6 Va,Vb,Ha=ssb_uvl(w,x,L) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= 44.444,Vb= 115.556, Ha =0.0 |
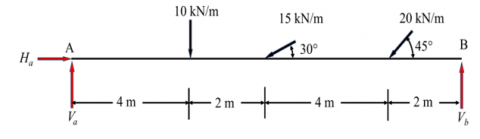
Example 4: For the simply supported beam and its FBD shown below in Figure 19, evaluate the reactions at the end:
Figure 19. Simply supported beam with point loads
Solution: Figure 20 represents the forces and reactions acting on the beam shown in Figure 19.
Figure 20. FBD
This problem has only point loads. The functions used is: ssb_pl(w,θ,x,L). The program to call the functions and its output is as follows:
|
Program |
|
w=[10,15,20] θ=[90,30,45] x=[4,6,10] L=12 Va,Vb,Ha=ssb_pl(w,θ,x,L) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= 12.774, Vb= 18.868, Ha =27.133 |
Example 5: For the simply supported beam shown below in Figure 21, evaluate the reactions at the end:
Figure 21. Simply supported beam with UVL and point loads
Solution: This problem has point loads and udl. The functions used are: ssb_pl (w,θ,x,L) and ssb_udl (w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Va,Vb,Hb=ssb_pl([20,60],[90,180-45],[2,7],9)+ssb_udl([30],[[2,6]],9) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= 91.65, Vb= 90.776, Hb =-42.426 |
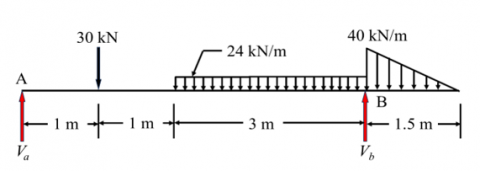
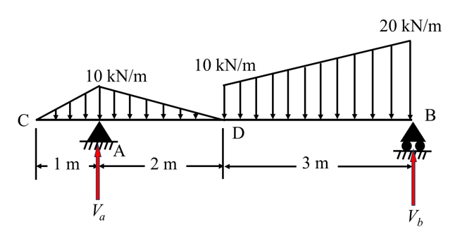
Example 6: For the simply supported beam shown below in Figure 22, evaluate the reactions at the end:
Figure 22. FBD of an over hanging beam
Solution: This problem has point load, uvl, and udl. The functions used are: ssb_pl(w,θ,x,L) , ssb_udl(w,x,L), and ssb_uvl(w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Va,Vb,Ha=ssb_pl([30],[90],[1],5)+ssb_udl([24],[[2,5]],5)+ssb_uvl([[40,0]],[[5,6.5]],5) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= 42.6, Vb= 89.4, Ha =0.0 |
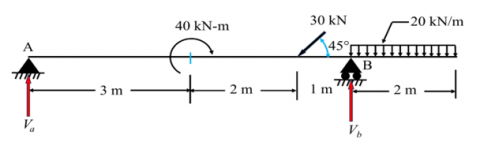
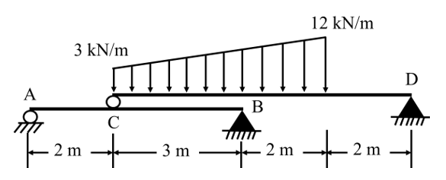
Example 7: For the overhanging beam shown below in Figure 23, evaluate the reactions at the end:
Figure 23. Overhanging beam with moment, point load, and UDL
Solution: This problem has point load, external moment, and udl. The functions used are: ssb_pl(w,θ,x,L), ssb_udl(w,x,L), and ssb_mom(w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Va,Vb,Ha=ssb_pl([30],[45],[5],6)+ssb_udl([20],[[6,8]],6)+ssb_mom([40],[3],6) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= -9.798, Vb= 71.011, Ha =21.213 |
Example 8: For the simply supported beam shown below in Figure 24, evaluate the reactions at the end:
Figure 24. Overhanging beam with UVL
Solution: This problem has two uvl’s. The function used is: ssb_uvl(w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Va,Vb,Ha=ssb_uvl([[0,10],[10,0],[10,20]],[[-1,0],[0,2],[2,5]],5) print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Ha ={round(Ha,3)}") |
|
Output |
|
Va= 26.0, Vb= 34.0, Ha =0.0 |
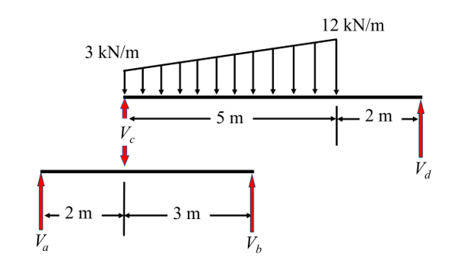
Example 9: For the simply supported beam shown below in Figure 25, evaluate the reactions at the end:
Figure 25. A complex beam
Solution: Free body diagrams of beams AB and CD are shown below in Figure 26.
Figure 26. FBD
This problem has one uvl but if looked closely, then the problem can be divided into two. First, the top beam has to be solved with uvl, which will result in a reaction at roller and D. Then the reaction at C will act as a point load for the bottom beam, which now can be solved for the reactions at A and B. The function used is: ssb_udl(w,x,L), and ssb_pl(w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Vc,Vd,Hd=ssb_uvl([[3,12]],[[0,5]],7) Va,Vb,Hb=ssb_pl([Vc],[90],[2],5) print(f"Vc= {round(Vc,3)},Vd= {round(Vd,3)}, Hd ={round(Hd,3)}") print(f"Va= {round(Va,3)},Vb= {round(Vb,3)}, Hb ={round(Hb,3)}") |
|
Output |
|
Vc= 21.429, Vd= 16.071, Hd =0.0 Va= 12.857, Vb= 8.571, Hb =0.0 |
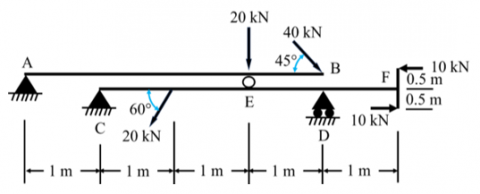
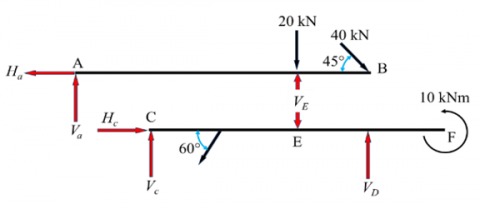
Example 10: For the simply supported beam shown below in Figure 27, evaluate the reactions at the end:
Figure 27. Arrangements of overhanging beams
Figure 28. FBD
Solution: The free body diagram of beams shown in Figure 26 is shown in Figure 28.
This problem also has two beams to solve. First, the top beam has to be solved with two-point loads, resulting in reaction at E and A. Then, the reaction at E will act as a point load for the bottom beam, which now can be solved for the reactions at C and D. Also, there is one moment acting at F of magnitude 10 N-m. The function used is: ssb_pl (w,θ,x,L), and ssb_mom (w,x,L). The program to call the functions and its output is as follows:
|
Program |
|
Va,Ve,Ha=ssb_pl([20,40],[90,180-45],[3,4],3) Vc,Vd,Hc=ssb_pl([Ve,20],[90,60],[2,1],3)+ssb_mom([-10*1],[4],3) print(f"Va= {round(Va,3)},Ve= {round(Ve,3)}, Ha ={round(Ha,3)}") print(f"Vc= {round(Vc,3)},Vd= {round(Vd,3)}, Hc ={round(Hc,3)}") |
|
Output |
|
Va= -9.428, Ve= 57.712, Ha =-28.284 Vc= 34.118, Vd= 40.915, Hc =10.0 |
While this study largely focuses on theoretical examples, the developed Python functions can be readily applied to a variety of real-world engineering situations as well. For instance, they can be used in structural analysis for designing safe and stable buildings, bridges, and mechanical systems subjected to multiple forces and moments. These functions can also serve as an educational tool to help the students understand the principles of statics and equilibrium in a more collaborative and practical way.
In this article, coplanar non-concurrent forces in beams were modelled using Python Programming. First, the mathematics for different types of loading is being presented. Then, functions were developed for both cantilever and simply supported beams for different types of loadings. The developed functions are also presented in the article, along with the explanation of arguments which these functions will take. Then, these functions were tested against ten typical problems in structural engineering. It has been observed that the results obtained from the functions are in good agreement with the literature. The developed Python functions have successfully simulated the coplanar and non-concurrent forces in beams under various loading conditions, providing accurate results that are in sync with the theoretical expectations.
It has also been observed that the ability of Python programming to model complex-looking algorithms in a few lines of code is immense. Hence, it can be said that the exploration of these forces through Python is a leap toward engineering excellence and scientific progress. Through this article, the readers will gain a comprehensive understanding of the principles of equilibrium of coplanar non-concurrent forces in beams, and they will also learn to apply them to real-world problems with the help of Python programming. The simplicity and usefulness of Python programming make it a valuable tool for both engineering practitioners and students. Engineers can benefit from efficient structural analysis, while students can gain a hands-on understanding of the principles of equilibrium and force systems.
Regardless of the accuracy and versatility of the developed Python functions, some limitations were viewed in the simulations. The present implementation primarily focuses on two-dimensional coplanar and non-concurrent force systems, which restricts its application to more complex three-dimensional or dynamic force systems. Also, the analysis is limited to the determinate beams, with indeterminate systems not yet considered. Future work could aim to expand the capabilities of the Python functions to handle three-dimensional force systems, dynamic loads, and indeterminate structural analyses. Additionally, incorporating more complex material properties and the effects of friction could enhance the realism of the simulations. As the field progresses, further improvements in the user interface and integration with other computational tools may also be explored to increase the accessibility and applicability of the developed approach.
|
F |
external forces |
|
W |
per unit length variation of uniformly distributed or uniformly varying loads |
|
V |
vertical support reaction |
|
H |
horizontal support reaction |
|
x |
position of external force |
|
$\left(x_l, x_r\right)$ |
span of UDL or UVL |
|
M |
moment |
|
Greek symbols |
|
|
$\theta$ |
angle at which the external force will act |
|
Subscripts |
|
|
$\ell$ |
left |
|
r |
right |
[1] Bhavikatti, S.S., Rajashekarappa, K.G. (1994). Engineering Mechanics. New Age International, India.
[2] Meriam, J.L., Kraige, L.G., Bolton, J.N. (2020). Engineering Mechanics: Dynamics. John Wiley & Sons, USA.
[3] Mittelstedt, C. (2023). Engineering Mechanics 2: Strength of Materials. Springer Vieweg Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-66590-9
[4] Nordin, M.N., Mohd Shah, M.K., Maidin, S.S., Mahmud, Y.H., Ismail, S.S.A. (2023). Outcomes-based approach in engineering education for special education need students: Psychology and rehabilitation elements. Journal for ReAttach Therapy and Developmental Diversities, 6(3): 52–58. https://jrtdd.com/index.php/journal/article/view/320.
[5] Travis, R.C. (1945). An experimental analysis of dynamic and static equilibrium. Journal of Experimental Psychology, 35(3): 216-234. https://psycnet.apa.org/doi/10.1037/h0059788
[6] Bower, A. F. (2009). Applied Mechanics of Solids. CRC Press, USA. https://doi.org/10.1201/9781439802489
[7] Powell, G.H. (2010). Modeling for Structural Analysis: Behavior and Basics. Berkeley, CA: Computers and Structures.
[8] Overtoom, E.M., Horeman, T., Jansen, F.W., Dankelman, J., Schreuder, H.W. (2019). Haptic feedback, force feedback, and force-sensing in simulation training for laparoscopy: A systematic overview. Journal of Surgical Education, 76(1): 242-261. https://doi.org/10.1016/j.jsurg.2018.06.008
[9] Collins, J., Chand, S., Vanderkop, A., Howard, D. (2021). A review of physics simulators for robotic applications. IEEE Access, 9: 51416-51431. https://doi.org/10.1109/ACCESS.2021.3068769
[10] Chernikova, O., Heitzmann, N., Stadler, M., Holzberger, D., Seidel, T., Fischer, F. (2020). Simulation-based learning in higher education: A meta-analysis. Review of Educational Research, 90(4): 499-541. https://doi.org/10.3102/0034654320933544
[11] McGarr, O. (2021). The use of virtual simulations in teacher education to develop pre-service teachers’ behaviour and classroom management skills: Implications for reflective practice. Journal of Education for Teaching, 47(2): 274-286.
[12] Varsha, M., Yashashree, S., Ramdas, D.K., Alex, S.A. (2019). A review of existing approaches to increase the computational speed of the python. International Journal of Research in Engineering, Science and Management, 2(4): 594-598.
[13] Mishra, P., Tewari, P., Mishra, D.R., Dumka, P. (2023). Numerical modelling of double integration with different data spacing: A Python-based approach. Mathematics and Computational Sciences, 4(2): 46-54. https://doi.org/10.30511/mcs.2023.1990951.1115
[14] Sanner, M.F. (1999). Python: A programming language for software integration and development. Journal of Molecular Graphics and Modelling, 17(1): 57-61.
[15] Fuhrer, C., Solem, J.E., Verdier, O. (2021). Scientific Computing with Python: High-Performance Scientific Computing with NumPy, SciPy, and Pandas. Packt Publishing Ltd, UK.
[16] Shein, E. (2015). Python for beginners. Communications of the ACM, 58(3): 19-21. http://doi.org/10.1145/2716560
[17] Joshi, A.R., Deo, A., Parashar, A., Mishra, D.R., Dumka, P. (2023). Modelling steam power cycle using Python. International Journal of Scientific Research in Computer Science, Engineering and Information Technology, 9(1): 152-162. https://doi.org/10.32628/CSEIT228671
[18] Gajula, K., Sharma, V., Sharma, B., Mishra, D.R., Dumka, P. (2022). Modelling of energy in transit using Python. International Journal of Innovative Science and Research Technology, 7(8): 1152-1156.
[19] Dumka, P., Rana, K., Tomar, S.P.S., Pawar, P.S., Mishra, D.R. (2022). Modelling air standard thermodynamic cycles using Python. Advances in Engineering Software, 172: 103186. https://doi.org/10.1016/j.advengsoft.2022.103186
[20] Dumka, P., Chauhan, R., Singh, A., Singh, G., Mishra, D. (2022). Implementation of Buckingham’s PI theorem using Python. Advances in Engineering Software, 173: 103232. https://doi.org/10.1016/j.advengsoft.2022.103232
[21] Kiusalaas, J. (2010). Numerical Methods in Engineering with Python. Cambridge University Press, UK.
[22] Doerr, H.M. (1997). Experiment, simulation and analysis: An integrated instructional approach to the concept of force. International Journal of Science Education, 19(3): 265-282. https://doi.org/10.1080/0950069970190302
[23] Reiley, C.E., Akinbiyi, T., Burschka, D., Chang, D.C., Okamura, A.M., Yuh, D.D. (2008). Effects of visual force feedback on robot-assisted surgical task performance. The Journal of Thoracic and Cardiovascular Surgery, 135(1): 196-202. https://doi.org/10.1016/j.jtcvs.2007.08.043
[24] Williams, L.E., Loftin, R.B., Aldridge, H.A., Leiss, E.L., Bluethmann, W.J. (2002). Kinesthetic and visual force display for telerobotics. In Proceedings 2002 IEEE International Conference on Robotics and Automation, Washington, USA, pp. 1249-1254. https://doi.org/10.1109/ROBOT.2002.1014714
[25] Françoso, M.T., Costa, D.C., Valin, M.M., Amarante, R.R. (2013). Use of open source software for the development of web GIS for accessibility to tourist attractions. Journal of Civil Engineering and Architecture, 7(4): 472-486.
[26] Hu, X., Zhou, Q. (2020). MATLAB software in the numerical calculation of civil engineering. In International Conference on Machine Learning and Big Data Analytics for IoT Security and Privacy, pp. 730-734. https://doi.org/10.1007/978-3-030-62746-1_110
[27] Carrera, E., Giunta, G., Petrolo, M. (2011). Beam Structures: Classical and Advanced Theories. John Wiley & Sons, USA.
[28] Saliklis, E., Saliklis, E. (2019). Non-concurrent forces and the funicular. In Structures: A Geometric Approach: Graphical Statics and Analysis. Springer, Cham, USA, pp. 31-56. https://doi.org/10.1007/978-3-319-98746-0_3
[29] Meurer, A., Smith, C.P., Paprocki, M., Čertík, O., et al. (2017). SymPy: Symbolic computing in Python. PeerJ Computer Science, 3: e103. http://doi.org/10.7717/peerj-cs.103
[30] Van Der Walt, S., Colbert, S.C., Varoquaux, G. (2011). The NumPy array: A structure for efficient numerical computation. Computing in Science & Engineering, 13(2): 22-30. https://doi.org/10.1109/MCSE.2011.37
[31] Bauckhage, C. (2020). NumPy/SciPy Recipes for Data Science: Subset-Constrained Vector Quantization via Mean Discrepancy Minimization, pp. 1-4.
[32] Johansson, R., John, S. (2019). Numerical Python: Scientific Computing and Data Science Applications with NumPy, SciPy and Matplotlib. Apress, USA.
[33] Ranjani, J., Sheela, A., Meena, K.P. (2019). Combination of NumPy, SciPy and Matplotlib/Pylab—A good alternative methodology to MATLAB—A Comparative analysis. In 2019 1st International Conference on Innovations in Information and Communication Technology (ICIICT), Chennai, India, pp. 1-5. https://doi.org/10.1109/ICIICT1.2019.8741475