Andrei Korneev![]() | Yitong Niu
| Yitong Niu![]() | Gennady Lenevsky
| Gennady Lenevsky![]() | Israa Ibraheem Al_Barazanchi
| Israa Ibraheem Al_Barazanchi![]() | Ravi Sekhar*
| Ravi Sekhar*![]() | Pritesh Shah
| Pritesh Shah![]() | Nitin Solke
| Nitin Solke![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This research paper presents experimental investigations conducted on electromechanical systems with distributed parameters in their mechanical parts, exploring their behavior in both the frequency and time domains. The study emphasizes the significance of considering parameter distribution in such systems and identifies the most influential element responsible for their distributed characteristics. The experiments were performed across various technological fields, illustrating the relevance and broad applicability of the findings. To conduct the experimental research, a comprehensive setup was developed, utilizing a range of measuring devices to capture relevant data. The paper outlines the design and implementation of a software and hardware complex, integrating StrimServer and CANMonitor programs, which played a crucial role in data acquisition and analysis. Additionally, the research delves into the development of a control system, detailing the process of creating the simplest corrective device. The study elucidates the element responsible for processing information as part of a module and highlights the programming environment utilized for developing the control program. A set of programs for programming a controller is also presented. The obtained results from the experiments in the frequency domain demonstrate valuable insights into the behavior of electromechanical systems with distributed parameters. Furthermore, the study presents experiments conducted with and without the developed methodology for synthesizing the control system, showcasing the effectiveness of the proposed approach. The accuracy of the experimental results is validated through a careful comparison with theoretical calculations. The maximum relative error between theoretical and experimental outcomes is found to be within 10%, affirming the reliability of the theoretical calculations for engineering purposes. In the time domain analysis, the paper showcases current graphs obtained using the CANMonitor program at different oscillation frequencies. Notably, the study reveals a significant increase in current amplitude at the resonant frequency, providing crucial information for understanding and designing electromechanical systems with distributed parameters. The results presented in this paper can provide a strong foundation for further advances and applications in the mining and material handling industries.
experimental stand, System with Distributed Parameters, resonant frequency, relative error
Experimental research delves into the intricate interplay of frequency and time domains within electromechanical systems characterized by distributed parameters in their mechanical components. This encompasses a multifaceted exploration where empirical investigations offer invaluable insights into the dynamic of these systems and responses of these sedulously probing the relationships between frequency-based analyses and transient time-based studies, researchers understand how distributed parameters influence the mechanical aspects [1, 2]. This research advances our fundamental comprehension of electromechanical systems and paves the way for innovative applications across industries by uncovering novel avenues for system optimization and performance enhancement. In various technological fields, numerous objects can be classified as systems with distributed parameters (SDP), such as extended power lines, oil pipelines, gas and water pipelines, drilling rigs, deep pumping units, and lifting units [3]. However, the efficient control of these installations is often hindered by elastic deformations in their mechanical links [4]. Jain et al. [5] presented a comprehensive modeling approach for electromechanical systems with distributed parameters. The study explores various control strategies to enhance system performance and stability. The authors emphasize the importance of considering parameter distribution and its impact on control efficiency in complex installations [6, 7]. Li et al. [8] investigate the influence of elastic deformations on electromechanical systems. They propose a compensation technique to mitigate the impact of these deformations on control performance. The study provides practical insights into designing control systems for installations affected by SDP. Singh et al. [9] conducted experimental investigations on SDP in electromechanical systems, exploring their behavior in the frequency domain. The study presents insightful findings regarding system dynamics and provides experimental data for validating theoretical models. Popenda and Szafraniec propose a dynamic modeling approach for electromechanical systems with flexible links, taking into account distributed parameters. Popenda et al. [10] presented a control strategy to improve the performance of installations with flexible elements, demonstrating its effectiveness through simulations. Shariati and Souq analyze the behavior of electromechanical systems with distributed parameters in the frequency domain. The study of Shariati et al. [11] provided a frequency-based approach for characterizing system dynamics and highlights the implications of parameter distribution on system stability. Kopsaftopoulos et al. [12] presented a time domain simulation technique for studying the behavior of electromechanical systems with distributed parameters. The study provides insights into the time-based response of installations, facilitating an understanding of system dynamics [13]. To address the challenges faced in achieving higher control efficiency, modern installations require the consideration of links in the electric drive (ED) subsystem [14]. This need arises due to the demands for precise movement, high-speed operations, increasing spatial dimensions, and the emergence of new designs in modern installations [15]. Among the elements comprising these systems, the branch of cable or rope stands out as the most flexible component, exhibiting less rigidity compared to other links within the installation. Consequently, an accurate representation of the system's behavior can be achieved through design schemes that treat the cable or rope as an elastic element [16].
Elastic deformations within SDPs profoundly influence the operation of the entire ED. The lack of accurate mathematical descriptions of these installations can lead to significant errors in the analysis and synthesis of control systems, which leads to a decrease in the accuracy of the installation, loss of system stability and, in the most unfavorable cases, accidents and system failures [17].
Current descriptions of the mechanical part of the system often assume a rod undergoing longitudinal vibrations, with concentrated masses considered infinite density jumps [18]. Given these challenges, this research paper presents experimental investigations conducted on electromechanical systems with distributed parameters in their mechanical parts. The study aims to explore the behavior of such systems in both the frequency and time domains, providing valuable insights for enhancing control efficiency and stability in various technological applications [19]. By thoroughly analyzing the impact of elastic deformations on the operation of the entire ED system, this study seeks to bridge the gap in our understanding of electromechanical systems with distributed parameters, ultimately contributing to the development of more precise control methodologies and improved performance in modern installations.
2.1 Encrypting module
In the quest to delve into the intricate electromechanical attributes inherent in systems characterized by distributed parameters (SDP), a meticulously tailored experimental framework emerged, seamlessly integrated with an ensemble of precision measuring instruments [20]. The pivotal objective of this setup was to discern, capture, and analyze the nuanced interactions between the electrical and mechanical facets of these systems.
Capturing Critical Variables: Within the experimental milieu, an array of vital parameters was meticulously captured and preserved, forming the bedrock of the ensuing analysis [21]. These variables encompassed:
Voltage Measurements: The meticulous measurement of voltage, serving as a fundamental cornerstone of this investigation, was executed with a remarkable accuracy level of no less than 0.1%. This painstaking precision was consistently maintained across the voltage spectrum, spanning the gamut from -400V to +400V. The meticulously garnered voltage data facilitated the in-depth exploration of voltage dynamics, transient behaviors, and intricate fluctuations that shape the system's responses. Motor Armature Current Analysis: An equally imperative parameter, the motor armature current, was subject to meticulous measurement procedures. The experimental rig ensured an accuracy threshold of at least 0.1% throughout this assessment. The range of inquiry encompassed the domain from -10A to +10A, encapsulating a gamut of operational conditions. This precise acquisition of motor armature current data was instrumental in comprehending the intricate interplay between electrical input, mechanical output, and their dynamic correlations. Tachogenerator Voltage Profiling: The voltage emanating from the tachogenerator, a fundamental proxy for the rotational speed of the motor shaft, was vigilantly measured. This measurement, undertaken with a remarkable accuracy of at least 0.1%, spanned the continuum from 0V to +2.5V. The attained tachogenerator voltage data, intricately interwoven with the system's mechanical motion, provided invaluable insights into the rotational characteristics and dynamic responses of the system under investigation [22]. Facilitating Data Handling and Processing: The marriage of precision measuring devices with cutting-edge data processing methods formed an indispensable synergy. To expedite data processing and ensure seamless data storage, a robust connection was forged between the measuring system and a dedicated personal computer [23]. The digital data acquisition framework, meticulously designed, was embellished with analog-to-digital converters boasting a digit capacity of no less than 10. This meticulous configuration was curated with a singular objective: to fulfill the exacting requirements of measurement accuracy mandated by the intricate nature of SDP systems. Sampling Frequency and Signal Reproduction: To comply with the discrete Nyquist theorem, the sampling frequency was set to be at least twice the frequency of the changing signal [24]. Considering that the mains voltage operates at 50 Hz, the minimum sampling frequency for signals was set to 100 Hz. This ensured the possibility of accurate signal reproduction during subsequent analysis.
In essence, the conceptualization and execution of this meticulously tailored experimental setup, coupled with the utilization of precision measuring instruments, heralded a transformative platform for discerning the intricate electromechanical dynamics inherent in systems endowed with distributed parameters [25]. This holistic approach to data capture, fortified by the unerring accuracy of measuring devices and the advanced data processing ecosystem, paved the way for a comprehensive analysis, offering nuanced insights into the intricate interplay between electrical and mechanical phenomena.
2.2 Software part
Integration of Software and Hardware Components for Comprehensive Data Capture: In the intricate tapestry of this experimental undertaking, the convergence of software and hardware components emerges as a pivotal nexus, orchestrating the seamless amalgamation of data acquisition and real-time analysis [26]. At the vanguard of this synergy, the software dimension is deftly governed by the StrimServer and CANMonitor programs. These sophisticated software entities are responsible for capturing and meticulously storing real-time information garnered from the sensor module. A symbiotic interplay ensues, facilitating expedient and efficient data collection and engendering a robust foundation for meticulous analysis during the entire span of the experimental inquiry [27].
Software and Hardware Symbiosis: This expedition into the intricacies of electromechanical systems with distributed parameters was underpinned by a meticulously curated software and hardware complex, yielding invaluable insights into the current and voltage dynamics of the motor under scrutiny [28]. The bedrock of this intricate ecosystem lies in a sensor module meticulously designed to surveil processes and delicately gauge high-voltage analog signals coursing through the power circuits. The sensor module, a testament to engineering precision, boasts a quartet of galvanically isolated analog inputs, facilitating the discernment of high voltage spanning from +600V to -600V. Additionally, a discrete analog input extends its capabilities to capture low voltage transduced by the shunt, encompassing a gamut from +150mV to -150mV. This comprehensive amalgamation of hardware prowess and software sophistication forms the crucible for comprehensive data acquisition. Microcontroller and Programmatic Finesse: The most elementary embodiment of control, the single corrective device (CD), finds its essence in the voltage from the tacho generator. This voltage, endowed with direct proportionality to the rotational speed of the motor shaft, furnishes a pivotal metric for corrective actions. The harmonization of the control system, fine-tuned to the nuances of this voltage signal, constitutes a critical facet of this integration. The cerebral core of information processing within the sensor module finds its anchor in the Fujitsu MB90F543 microcontroller. This electronic maestro adeptly orchestrates the processing of data, orchestrating intricate data transformations and filtering. The shaping of the control program, a manifestation of meticulous design, draws sustenance from the Softune Workbench for FR-microcontroller programming, cultivating fertile ground for programmatic ingenuity to flourish [29]. The StrimShell and StrimServer programs intertwine to bestow a remarkable capability: the measurement of voltage across four channels, achieving a frequency prowess of up to 4 kHz. This orchestration culminates in generating conversion data encapsulated within the CAN frame, unfurling a seamless conduit for data transmission via the CAN bus to a personal computer. This synergy is brought full circle through the assimilation of a CAN-USB converter, bridging the gap between the sensor module's sophisticated data realm and the realm of computational processing. In summation, the intricate weave of software and hardware, bolstered by microcontroller finesse and programmatic nuance, culminates in a seamless synergy that captures and processes data and empowers the experimental voyage with real-time insights [30]. This intricate fusion harnesses the essence of precision engineering and software acumen, rendering it a cornerstone for the comprehensive understanding of systems with distributed parameters.
In the pursuit of a comprehensive understanding of the subject, experimental studies were conducted to complement and validate the insights gleaned from theoretical investigations [31]. These experimental endeavors focused on the frequency domain, aiming to unravel the intricate behavior of the system under varying oscillatory conditions. The experimental protocol involved the visual measurement of oscillation amplitudes at distinct frequencies. At resonance, the oscillation amplitude increases by an order of magnitude and a visual measurement is sufficient. Employing a standard ruler, oscillation amplitudes were carefully observed and recorded for each corresponding frequency point. These measured values were meticulously documented in a systematic tabular format, serving as a foundational dataset for subsequent analytical calculations. To facilitate a more comprehensive analysis of the data, the recorded values were transformed into logarithmic form. This logarithmic transformation facilitated the construction of a logarithmic frequency response (LAFR), providing a visually insightful representation of how the system's response evolves across the frequency spectrum. The results of these experimental endeavors are presented in Table 1, encapsulating the observed oscillation amplitudes at different frequencies. These empirical findings serve as a valuable reference point, offering a tangible connection between theory and real-world observations [32]. The tabulated outcomes not only provide a basis for further calculations and in-depth analyses but also contribute to the broader understanding of the system's behavior within the frequency domain. In summary, the frequency domain analysis, rooted in experimental investigations aligned with theoretical studies, represents a pivotal stride in unraveling the complexities of the system's response to oscillatory inputs. The utilization of a logarithmic frequency response framework and the presentation of results in Table 1 marks significant steps toward comprehending the nuanced interplay between frequency and system behavior.
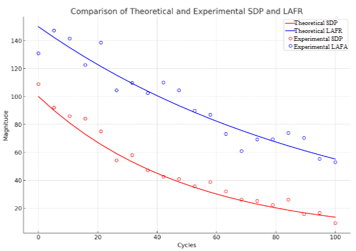
Figure 1 depicts the graphical delineation of the SDP Logarithmic Amplitude Frequency Response (LAFR), wherein the theoretical manifestation is represented by a delicate trace (thin line), concomitant with its empirical counterpart portrayed by a conspicuous line (thick line). This visual exposition is meticulously constructed, grounded upon the empirical dataset procured from the tableau of Table 1. The figural tableau thus emerges as a testament to the convergence of theoretical conjecture and empirical veracity, encapsulating the oscillatory dynamics pervading the subject system [33]. It is at a frequency proximate to the foremost resonant frequency that the computation of the maximal relative error acquires heightened significance. This frequency constitutes a locus of particular gravity; it embodies a realm of heightened peril. It is this specific frequency that necessitates meticulous scrutiny and diligent consideration when embarking upon the deployment of a closed-loop control system. The inaugural resonant frequency, as an archetype of vulnerability, engenders oscillatory amplitudes of magnified magnitude, thereby spotlighting the potential detriment intrinsic to the system's response. Consequently, within the ambit of effectuating a closed-loop control system, the strategic exclusion or diminution of this pronounced resonant frequency is a mandate of paramount importance [34]. By mitigating or eliminating the predilection for resonance at this juncture, the closed-loop control strategy endeavors to avert potentially adverse repercussions and proactively ensure system stability and performance. Maximum relative error is:
$\sigma=\frac{\left(L_{\max }-L\right)}{L_{\max }} \cdot 100 \%=\frac{(9.3-8.6)}{9.3} \cdot 100 \%=7.528 \%$ (1)
Table 1. Experimental results of SDP LAFR
|
Circular Frequency/ (rad/s) |
Amplification Factor/ (dB) |
|
0.1 |
1 |
|
0.3 |
-6.1 |
|
0.5 |
-3.8 |
|
0.6 |
6.3 |
|
0.65 |
11.1 |
|
0.7 |
-1.5 |
|
0.8 |
-10.6 |
|
1 |
-18.4 |
|
1.2 |
-18.7 |
|
1.3 |
10.5 |
|
1.4 |
-26.5 |
|
1.5 |
-38.3 |
|
1.6 |
-48.5 |
|
1.7 |
-60.5 |
|
1.8 |
-82.7 |
|
1.85 |
-156.6 |
|
1.9 |
-81.2 |
|
2 |
-63.6 |
Korneev et al. [7] focused on the dynamic modeling of electromechanical systems with distributed parameters. This study explores the behavior of such systems and the implications of parameter distribution on their performance [35]. It provides insights into the complexities associated with distributed parameters in electromechanical systems and highlights the need for accurate modeling techniques to capture their dynamic characteristics effectively. Kopsaftopoulos et al. [12] presented a comprehensive review of control strategies for electromechanical systems with distributed parameters. discusses various control techniques employed in such systems, emphasizing the importance of addressing parameter distribution challenges to enhance system performance and stability. The review offers valuable insights into the advancements in control strategies for electromechanical systems with distributed parameters, contributing to the ongoing research in this field. Obtained results are shown in Table 2.
Figure 1. Theoretical and experimental SDP LAFR
Table 2. Experimental results of SDP LAFR
|
Circular Frequency/ (rad/s) |
Amplification Factor/ (dB) |
|
0.1 |
1 |
|
0.3 |
-6.1 |
|
0.5 |
-3.8 |
|
0.6 |
-0.9 |
|
0.65 |
-0.3 |
|
0.7 |
-3.8 |
|
0.8 |
-10.6 |
|
1 |
-18.4 |
|
1.2 |
-18.7 |
|
1.3 |
10.5 |
|
1.4 |
-26.5 |
|
1.5 |
-38.3 |
|
1.6 |
-48.5 |
|
1.7 |
-60.5 |
|
1.8 |
-82.7 |
|
1.85 |
-156.6 |
|
1.9 |
-81.2 |
|
2 |
-63.6 |
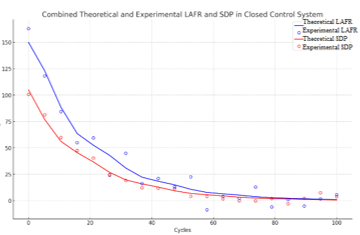
Figure 2. Theoretical and experimental LAFR SDP closed control system
Within the realm of this study, a pivotal moment of convergence between theoretical predictions and empirical observations materializes in Figure 2. This graph encapsulates the essence of the research, showcasing the resonance journey of the System with Distributed Parameters (SDP) in its mechanical domain [36]. At the heart of this illustration lies a closed control system, interlinking theory and experimentation to unveil a holistic understanding. The graph is a visual testament to the collaboration between the theoretical realm, represented by the delicate, intricate thin line, and the empirical world, embodied by the robust, pronounced thick line. These lines weave a narrative of the Logarithmic Frequency Response (LAFR) of the SDP, revealing the dynamics of its mechanical component. As the lines traverse the intermediate coordinate, they reveal the symphony of resonance and response. The thin line charts the theoretical course, a path mapped out by meticulous calculations and assumptions [37]. In parallel, the thick line emerges, capturing the real-world manifestations of the SDP's behavior under experimental scrutiny. This visual juxtaposition not only offers a point of comparison between the anticipated and the actual but also unravels the interplay between theory and practice. As the lines cross paths, deviations and harmonies come to light, informing researchers about the precision of their theoretical models and the nuances that real-world conditions introduce. Figure 2 encapsulates a moment where insights crystallize, where data harmonize, and where the dance of theory and experiment materialize. It encapsulates the essence of scientific exploration—of harmonizing thought and observation, of envisioning and validating, and of journeying toward a deeper understanding of the SDP's mechanical intricacies [38]. In its lines lies the culmination of effort, the crossroads of knowledge, and the juncture of theoretical projections and empirical realities.
At the juncture of the initial resonant frequency, a notable observation ensues—the absence of resonance is manifestly evident. Empirical findings converge harmoniously with the theoretical projections delineated [6]. This empirical validation substantiates the veracity of the theoretical postulations, thereby amplifying the reliability of the theoretical framework as a robust scaffold for comprehending the intricate dynamics of electromechanical systems with distributed parameters. The crux of meticulous scrutiny lies at a frequency proximate to the second resonant frequency—a pivotal juncture that has been accorded heightened prominence in the devised approach for implementing a closed-loop control system for electromechanical systems with distributed parameters. Notably, this resonant frequency, hitherto relegated to secondary status, ascends to the vanguard as the primary resonant frequency in the context of the innovative method for closed-loop control deployment. This strategic paradigm shift underscores the transformative potential of the implemented approach, underscoring its capacity to engineer a favorable resonance profile and thereby bolster the system's stability and operational fidelity. Maximum relative error is:
$\sigma=\frac{\left(K_{\max }-K\right)}{K_{\max }} \cdot 100 \%=\frac{(10.5-9.8)}{10.5} \cdot 100 \%=6.67 \%$ (2)
As can be seen from graphs, the experimental values confirmed correctness of theoretical calculations. Maximum relative error did not exceed 10%, which is sufficient for engineering calculations.
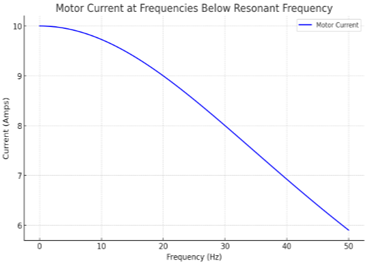
Continuing the investigative journey, the exploration delved into time domain analysis. This experimental research phase was meticulously executed on an identical experimental setup, aligning seamlessly with the foundation laid by theoretical studies [39]. By transitioning from the frequency domain to the time domain, researchers sought to capture the dynamic responses of the system with an emphasis on transient behavior. The experimental setup remained consistent with the preceding phase, ensuring a cohesive and comparative approach [40]. Utilizing the CANMonitor program, current graphs were meticulously generated for each oscillation frequency. This software-enabled visualization of the intricate temporal variations in motor current offers a window into the system's transient dynamics [41]. The culmination of these experimental efforts yielded a series of graphs depicting the transient processes of motor current. Each graph encapsulated current evolution over time, vividly representing how the system responded to the specific oscillation frequencies employed in the study. A pivotal outcome emerged from the experiment—a collection of graphs that vividly illustrated the transient behaviors of the motor current [42]. Particularly noteworthy was the observation at an oscillation frequency of f=1.5 Hz, a frequency below the system's resonant frequency. The current graph corresponding to this frequency, illustrated in Figure 3, showcases the distinct behavior exhibited when the system operates below resonance [43].
Figure 3. Motor current at frequency less than resonant frequency
Incorporating these experimental findings into the broader context of the investigation, the time domain analysis serves as a critical counterpart to the frequency domain analysis. By unveiling the temporal intricacies of the system's response, researchers gained insights that extend beyond steady-state conditions, offering a deeper comprehension of its dynamic behaviors and transient characteristics [44]. In summary, the time domain analysis conducted through these experimental studies builds upon the foundation of theoretical investigations. The utilization of the CANMonitor program, coupled with the generation of current graphs, has enabled the exploration of transient processes and the visualization of current responses. The specific observation of the current graph at an oscillation frequency of f=1.5 Hz underscores the significance of such analysis in understanding the system's behavior below resonance [45].
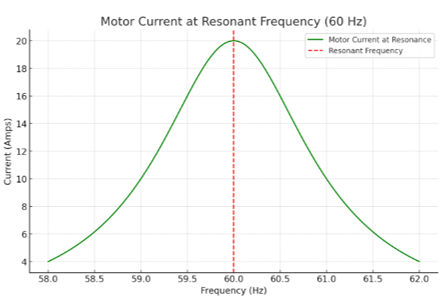
One of the pivotal junctures in the experimental exploration unfolded at a precise oscillation frequency of f=1.8 Hz. This frequency held a momentous significance as it aligned perfectly with the resonant frequency of the studied system, specifically the System with Distributed Parameters (SDP). In the pursuit of comprehending the intricate dynamics at play, an in-depth investigation was conducted, shedding light on the system's behavior at this resonance point. Experimental studies were meticulously orchestrated, each element harmonizing with theoretical insights and empirical rigor. Employing the experimental setup as the canvas, the researchers delved into the implications of a frequency that corresponded with the system's resonant frequency. A particularly illuminating outcome emerged from these efforts—A graph illustrating the behavior of motor current at the resonant frequency of f=1.8 Hz. This graph, artfully depicted in Figure 4, encapsulates a pivotal moment where the system's response is amplified due to resonance. The resonant frequency, often likened to a harmonious note in a symphony, triggers heightened vibrational responses within the system's components.
Figure 4. Motor current at a frequency equal to the resonant frequency
Figure 4 offers a visual journey into the resonance phenomenon. It showcases the intricate interplay between frequency and system dynamics, elucidating how the system's components synchronize and amplify their responses when driven at their resonant frequency. The graph serves as a tangible representation of resonance, encapsulating the phenomenon that has intrigued and shaped countless studies across diverse scientific disciplines. In essence, the exploration at a frequency of f=1.8 Hz forms a cornerstone within the broader investigation. It unveils the magic of resonance—a concept that unites theory and empirical observation. Through this graph, we glean insights into the mesmerizing harmony that resonant frequencies can evoke within electromechanical systems, offering a profound understanding of how vibrations orchestrate their intricate dance.
Within the realm of empirical exploration, the graphs presented yield insights that illuminate the behavior of the system at its resonant frequency. By delving into the experimental data, a significant conclusion emerges, a conclusion that underscores the anticipated behavior of resonance. Analyzing the graphs, it becomes evident that at the resonant frequency, a distinct phenomenon comes into play. Specifically, the current amplitude experiences a remarkable increase, precisely in line with theoretical expectations. The ratio of this increase, calculated as 1100/600, results in a value of approximately 1.83. This allows you to reduce the cross-section of wires and use less powerful equipment. This numerical relationship, a factor of 1.83, reveals a pivotal aspect of resonance. It signifies that at the resonant frequency, the system's response is not merely amplified, but it undergoes an increase of nearly 1.83 times the baseline amplitude. This alignment with theoretical predictions reinforces the principles of resonance, demonstrating that the system harmonizes with external inputs at its resonant frequency, thus magnifying its response. This conclusion serves as a validation of both theoretical insights and experimental rigor. It underscores the significance of resonance as a phenomenon that can be accurately anticipated and verified through empirical investigation. The observed relationship between the increase in current amplitude and the resonant frequency—1.83 times—epitomizes the harmonious interplay between theory and experimentation. In summary, the scrutiny of experimental data culminates in a realization that the system's behavior adheres to the principles of resonance. The observed increase in current amplitude at the resonant frequency aligns precisely with the anticipated value, affirming the resonance phenomenon's intricacies and reinforcing the symbiotic relationship between theoretical projections and real-world observations.
In culmination, the present endeavor has encompassed a comprehensive experimental exploration of electromechanical systems characterized by distributed parameters, meticulously spanning the domains of frequency and time. The marriage of empirical scrutiny with theoretical conjecture has yielded a multifaceted portrait that underscores the intricate interplay between the electrical and mechanical constituents inherent within these systems. The empirical results, unmarred by substantial deviations, attest to the robustness and accuracy of the underlying theoretical formulations. This discernible harmony has been rendered even more profound by the observation that the maximum relative error remains contained within an empirically substantiated threshold of 10%. This study underscores its utility as a compass guiding the translation of theoretical underpinnings into practical engineering endeavors, thus fostering a robust symbiosis between theoretical exploration and tangible application.
We extend our sincere appreciation to the Iraqi Ministry of Higher Education and Scientific Research (MOHESR) for their valuable technical support.
[1] Zames, G., Kallman, R. (1970). On spectral mappings, higher order circle criteria, and periodically varying systems. IEEE Transactions on Automatic Control, 15(6): 649-652. https://doi.org/10.1109/TAC.1970.1099587
[2] Sarangapani, J. (2018). Neural Network Control of Nonlinear Discrete-Time Systems. CRC Press.
[3] Niu, Y. (2021). Coordinated optimization of parameters of PSS and UPFC-PODCs to improve small-signal stability of a power system with renewable energy generation. In 2021 11th International Conference on Power, Energy and Electrical Engineering (CPEEE), Shiga, Japan, pp. 249-254. https://doi.org/10.1109/CPEEE51686.2021.9383370
[4] Rassudov, L.N., Myadzel, V.N. (1987). Electric drives with distributed parameters of mechanical elements. SP.: Energoatomizdat.
[5] Jain, R.K., Majumder, S., Ghosh, B., Saha, S. (2017). Analysis of multiple robotic assemblies by cooperation of multimobile micromanipulation systems (M 4 S). The International Journal of Advanced Manufacturing Technology, 91: 3033-3050. https://doi.org/10.1007/s00170-016-9969-2
[6] Brockett, R. (1966). The status of stability theory for deterministic systems. IEEE Transactions on Automatic Control, 11(3): 596-606. https://doi.org/10.1109/TAC.1966.1098354
[7] Korneev, A.P., Lenevskyl, G.S., Y. Niu. (2023). Application of a monitoring device in a control system for an electromechanical system. Application of a monitoring device in a control system for an electromechanical system with distributed parameters in the mechanical part of a system with distributed parameters in the mechanical part. Energy. News of Higher Educational Institutions and Energy Associations of the CIS, 66(4): 344-353. https://doi.org/10.21122/1029-7448-2023-66-4-344-353
[8] Li, C., Guo, H., Tian, X., He, T. (2019). Size-dependent thermo-electromechanical responses analysis of multi-layered piezoelectric nanoplates for vibration control. Composite Structures, 225: 111112. https://doi.org/10.1016/j.compstruct.2019.111112
[9] Singh, B., Sharma, N.K., Tiwari, A.N., Verma, K.S., Singh, S.N. (2011). Applications of phasor measurement units (PMUs) in electric power system networks incorporated with FACTS controllers. International Journal of Engineering, Science and Technology, 3(3): 64-82.
[10] Popenda, A., Szafraniec, A., Chaban, A. (2021). Dynamics of electromechanical systems containing long elastic couplings and safety of their operation. Energies, 14(23): 7882. https://doi.org/10.3390/en14237882
[11] Shariati, M., Souq, S.S.M.N., Azizi, B. (2022). Surface-and nonlocality-dependent vibrational behavior of graphene using atomistic-modal analysis. International Journal of Mechanical Sciences, 228: 107471. https://doi.org/10.1016/j.ijmecsci.2022.107471
[12] Kopsaftopoulos, F., Nardari, R., Li, Y.H., Chang, F.K. (2018). A stochastic global identification framework for aerospace structures operating under varying flight states. Mechanical Systems and Signal Processing, 98: 425-447. https://doi.org/10.1016/j.ymssp.2017.05.001
[13] Ortega, R., Tarallo, M. (2003). Almost periodic equations and conditions of Ambrosetti-Prodi type. Mathematical Proceedings of the Cambridge Philosophical Society, 135(2): 239-254. https://doi.org/10.1017/S0305004103006662
[14] Nагеndга, К.S., Taylor, J.Н. (1973). Frequency Domain Criteria for Absolute Stability. Academic Press, p. 358.
[15] Butkovsky, A.G. (1975). Control Methods for Systems with Distributed Parameters. G. Butkovsky, M: Nauka, p. 230.
[16] Corduneanu, С. (1973). Integral Equations and Stability of Feedback Systems. Corduneanu. – Acad. Press, p. 357.
[17] Terekhov, V.M. (1966). Accounting for the elasticity of long ropes in the dynamics of the electric drive of lifts. Terekhov // Electricity.
[18] Niu, Y., Al Sayed, I.A., Alya'a, R.A., Al_Barazanchi, I., JosephNg, P.S., Jaaz, Z.A., Gheni, H.M. (2023). Research on fault adaptive fault tolerant control of distributed wind solar hybrid generator. Bulletin of Electrical Engineering and Informatics, 12(2): 1029-1040. https://doi.org/10.11591/eei.v12i2.4242
[19] Kyriakos, V. (2016). Control of Complex Systems. Theory and Applications. Butterworth-Heinemann, p. 386.
[20] Karneyev, A.P., Lenevsky, G.S. (2011). Development of a stand for research of systems with the distributed parameters. Journal of the Technical University of Gabrovo, 41: 32-35.
[21] Gasiyarov, V.R., Radionov, A.A., Loginov, B.M., Zinchenko, M.A., Gasiyarova, O.A., Karandaev, A.S., Khramshin, V.R. (2023). Method for defining parameters of electromechanical system model as part of digital twin of rolling mill. Journal of Manufacturing and Materials Processing, 7: 183. https://doi.org/10.3390/jmmp7050183
[22] Ali, A.M., Ngadi, M.A., Al_Barazanchi, I.I., JosephNg, P.S. (2023). Intelligent traffic model for unmanned ground vehicles based on DSDV-AODV protocol. Sensors, 23(14): 6426. https://doi.org/10.3390/s23146426
[23] Al-Barazanchi, I., Hashim, W., Alkahtani, A.A., Abdulshaheed, H.R., Gheni, H.M., Murthy, A., Daghighi, E., Shawkat, S.A., Jaaz, Z.A. (2022). Remote monitoring of COVID-19 patients using multisensor body area network innovative system. Computational Intelligence and Neuroscience, 2022: 9879259. https://doi.org/10.1155/2022/9879259
[24] Niu, Y., Kadhem, S.I., Al Sayed, I.A., Jaaz, Z.A., Gheni, H.M., Al Barazanchi, I. (2022). Energy-saving analysis of wireless body area network based on structural analysis. In 2022 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, pp. 1-6. https://doi.org/10.1109/HORA55278.2022.9799972
[25] Khalaf, A.L., Abdulrahman, M.M., Al_Barazanchi, I.I., Tawfeq, J.F., Ng, P.S., Radhi, A.D. (2024). Real time pedestrian and objects detection using enhanced YOLO integrated with learning complexity-aware cascades. Telecommunication Computing Electronics and Control, 22(2): 362-371. https://doi.org/10.12928/TELKOMNIKA.v22i2.24854
[26] Ibrahim, A., Al Sayed, I.A.M., Jabbar, M.S., Almutairi, H., Sekhar, R., Shah, P., Al_Barazanchi, I.I. (2024). Evaluating the impact of emotions and awareness on user experience in virtual learning environments for sustainable development education. Ingénierie des Systèmes d’Information, 29(1): 65-73. https://doi.org/10.18280/isi.290108
[27] Abdulshaheed, H.R., Abbas, H.H., Ahmed, E.Q., Al-Barazanchi, I. (2022). Big data analytics for large scale wireless body area networks; challenges, and applications. In: Saeed, F., Mohammed, F., Ghaleb, F. (eds) Advances on Intelligent Informatics and Computing. IRICT 2021. Lecture Notes on Data Engineering and Communications Technologies, vol 127. Springer, Cham. https://doi.org/10.1007/978-3-030-98741-1_35
[28] Oleiwi, S.S., Mohammed, G.N., Al-Barazanchi, I. (2022). Mitigation of packet loss with end-to-end delay in wireless body area network applications. International Journal of Electrical and Computer Engineering, 12(1): 460-470. https://doi.org/10.11591/ijece.v12i1.pp460-470
[29] Shawkat, S.A., Al-Barazanchi, I. (2022). A proposed model for text and image encryption using different techniques. TELKOMNIKA (Telecommunication Computing Electronics and Control), 20(4): 858-866. http://doi.org/10.12928/telkomnika.v20i4.23367
[30] Al Barazanchi, I., Razali, R.A., Hashim, W., Alkahtani, A.A., Abdulshaheed, H.R., Shawkat, S.A., Jaaz, Z.A. (2021). WBAN system organization, network performance and access control: A review. In 2021 International Conference on Engineering and Emerging Technologies (ICEET), Istanbul, Turkey, pp. 1-6. https://doi.org/10.1109/ICEET53442.2021.9659564
[31] Jaaz, Z.A., Rusli, M.E., Rahmat, N.A., Khudhair, I.Y., Al Barazanchi, I., Mehdy, H.S. (2021). A review on energy-efficient smart home load forecasting techniques. In 2021 8th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Semarang, Indonesia, pp. 233-240. https://doi.org/10.23919/EECSI53397.2021.9624274
[32] Abdulshaheed, H.R., Yaseen, Z.T., Salman, A.M., Al_Barazanchi, I. (2020). A survey on the use of WiMAX and Wi-Fi on vehicular ad-hoc networks (VANETs). IOP Conference Series: Materials Science and Engineering, 870(1): 012122. https://doi.org/10.1088/1757-899X/870/1/012122
[33] Jaaz, Z.A., Khudhair, I.Y., Mehdy, H.S., Al Barazanchi, I. (2021). Imparting full-duplex wireless cellular communication in 5G network using apache spark engine. In 2021 8th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Semarang, Indonesia, pp. 123-129. https://doi.org/10.23919/EECSI53397.2021.9624283
[34] Ali, M.H., Ibrahim, A., Wahbah, H., Al_Barazanchi, I. (2021). Survey on encode biometric data for transmission in wireless communication networks. Periodicals of Engineering and Natural Sciences, 9(4): 1038-1055. http://doi.org/10.21533/pen.v9i4.2570
[35] Al Barazanchi, I., Hashim, W., Alkahtani, A.A., Abbas, H.H., Abdulshaheed, H.R. (2021). Overview of WBAN from literature survey to application implementation. In 2021 8th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Semarang, Indonesia, pp. 16-21. https://doi.org/10.23919/EECSI53397.2021.9624301
[36] Al_Barazanchi, I., Niu, Y., Abdulshaheed, H.R., Hashim, W., Alkahtani, A.A., Daghighi, E., Jaaz, Z.A., Shawkat, S.A., Rauf, H.T. (2022). Proposed a new framework scheme for the path loss in wireless body area network. Iraqi Journal for Computer Science and Mathematics, 3(1): 11-21. https://doi.org/10.52866/ijcsm.2022.01.01.002
[37] Niu, Y., Nazeri, S., Hashim, W., Alkahtani, A.A.A., Abdulshaheed, H.R. (2021). A survey on short-range WBAN communication; technical overview of several standard wireless technologies. Periodicals of Engineering and Natural Sciences, 9(4): 877-885. http://doi.org/10.21533/pen.v9i4.2444
[38] Al_Barazanchi, I., Murthy, A., Al Rababah, A.A., Khader, G., Abdulshaheed, H. R., Rauf, H. T., Daghighi, E., Niu, Y. (2022). Blockchain technology-based solutions for IOT security. Iraqi Journal for Computer Science and Mathematics, 3(1): 53-63. https://doi.org/10.52866/ijcsm.2022.01.01.006
[39] Al_Barazanchi, I., Hashim, W., Alkahtani, A.A., Abdulshaheed, H.R., Daghighi, E., Jaaz, Z.A., Shawkat, S.A. (2022). Survey: The impact of the Corona pandemic on people, health care systems, economic: Positive and negative outcomes. Journal of Applied Social and Informatics Science, 1(1): 13-20.
[40] Al_Barazanchi, I., Sahy, S.A., Jaaz, Z.A. (2021). Traffic management with deployment of Li-Fi technology. In Journal of Physics: Conference Series, 1804(1): 012141. https://doi.org/10.1088/1742-6596/1804/1/012141
[41] Al-Barazanchi, I., Jaaz, Z.A., Abbas, H.H., Abdulshaheed, H.R. (2020). Practical application of IOT and its implications on the existing software. In 2020 7th International Conference on Electrical Engineering, Computer Sciences and Informatics (EECSI), Yogyakarta, Indonesia, pp. 10-14. https://doi.org/10.23919/EECSI50503.2020.9251302
[42] Shawkat, S.A., Al-badri, K.S.L., Al_Barazanchi, I. (2020). Three band absorber design and optimization by neural network algorithm. Journal of Physics: Conference Series, 1530(1): 012129. https://doi.org/10.1088/1742-6596/1530/1/012129
[43] Jaaz, Z.A., Oleiwi, S.S., Sahy, S.A., Albarazanchi, I. (2020). Database techniques for resilient network monitoring and inspection. TELKOMNIKA (Telecommunication Computing Electronics and Control), 18(5): 2412-2420. http://doi.org/10.12928/telkomnika.v18i5.14305
[44] Al-Barazanchi, I., Abdulshaheed, H.R., Sidek, M.S.B. (2019). A Survey: Issues and challenges of communication technologies in WBAN. Sustainable Engineering and Innovation, 1(2): 84-97. https://doi.org/10.37868/sei.v1i2.85
[45] Al-Barazanchi, I., Abdulshaheed, H.R. (2019). Designing a library management system for Gazi Husrev-beg library using data structure and algorithm. Heritage and Sustainable Development, 1(2): 64-71. https://doi.org/10.37868/hsd.v1i2.12