Hassan Jaleel Hassan![]() | Ali Majeed Mahmood*
| Ali Majeed Mahmood*![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Wildfires pose significant threats globally, affecting human life, wildlife, and ecosystems. The detrimental effects of these fires are often exacerbated by inaccuracies in fire positioning systems and delays in alarm response, leading to rapid and uncontrolled fire spread, consequently affecting emergency response times. This paper presents a novel, real-time wildfire localization system that employs an optimized trilateration technique. The technique leverages anchor node technology for the localization process. The Nelder-Mead (NM) optimization algorithm is utilized to augment the trilateration technique, thereby enhancing the accuracy of the estimated coordinates for unidentified nodes. The proposed localization algorithm is deployed using cloud computing and the Internet of Things (IoT) MQTT communication protocol. Simulation results demonstrate that the proposed method maintains accurate localization performance, with an enhancement in fire localization accuracy of up to 83% with the optimized trilateration based on the NM algorithm. As a result, the proposed approach offers potential time-savings in the early detection of wildfires, thus contributing to more efficient emergency response measures.
wildfire, forest fire, localization, WSN, trilateration, Nelder-Mead algorithm, anchor node, cloud computing, IoT protocol
Forests play an indispensable role in sustainable development, primarily by mitigating the impacts of climate change. Offering a myriad of benefits, their significance rivals, if not surpasses, those of daily consumption agricultural products. Essential for human survival and societal progression, forests also maintain the planet's ecological equilibrium. In the European Union alone, forests absorb around 417 million tons of CO2 annually [1]. Despite these valuable contributions, the escalating frequency of forest fires, often instigated by human negligence or environmental shifts, is a major source of carbon dioxide release, posing serious threats to humans, animals, and the global environment [2].
To illustrate the catastrophic extent of wildfire disasters, the European Forest Fire Information System (EFFIS) reported nearly 1600 fires in May of 2022, burning approximately 250,000 hectares within Europe alone [3]. The ensuing damages extend beyond the ecological, resulting in the loss of essential resources, including transportation, communication, power and gas utilities, water supplies, crops, and property, coupled with a significant decline in air quality.
Among the primary challenges with forest fires is the speed of propagation, which is directly proportional to factors such as wind speed at the time of the disaster as shown in Figure 1. Research findings indicate that the forward rate of fire spread is approximately 10% of the average 10-m open wind speed, when both are represented in the same units (e.g., km/h) [4]. This rapid propagation necessitates prompt efforts to locate the fire's source shortly after ignition before it extends to neighboring regions, thereby underscoring the importance of early wildfire detection in the context of smart forest management.
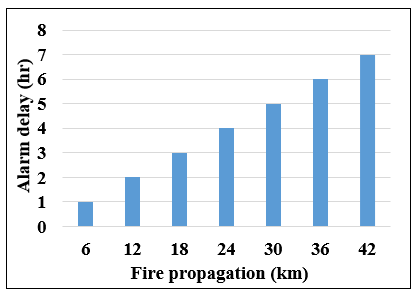
To exemplify the repercussions of delayed wildfire detection, consider a wind speed of 10 km/hr. As Figure 2 illustrates, any delay in sounding the wildfire alarm can lead to a drastic increase in the fire's extent, making it increasingly challenging to control.
To effectively identify and respond to critical events such as wildfires, precise location data is paramount. The process of determining the geographical coordinates of sensor nodes in Wireless Sensor Networks (WSNs) is known as localization or positioning, a fundamental aspect of contemporary communication systems [5]. The value of sensor data is inextricably linked to the knowledge of its origin. Different applications necessitate varied levels of positioning accuracy, leading to the use of a variety of localization techniques. However, unique scenarios, such as forest fire detection, present a distinct set of challenges [6].
This paper introduces an accurate localization system based on the trilateration technique, designed specifically for precise fire positioning in forests. The proposed system leverages the concept of anchor nodes and an optimized application of the trilateration technique. Given that trilateration can sometimes fail to provide an optimized location [7, 8], the Nelder-Mead (NM) optimization algorithm is proposed as a solution to this issue. To the authors' knowledge, no previous work has combined the NM optimization algorithm with trilateration for effective localization tasks.
The primary contributions of this paper are as follows:
The remainder of this paper is structured as follows: Section 2 reviews related works. Section 3 outlines the theoretical underpinnings of the research components. Section 4 delineates the WSN model. Section 5 presents the proposed optimized trilateration algorithm. Section 6 discusses the simulation results, and Section 7 concludes the paper.
Figure 1. The correlation between the wind speed versus the fire propagation rate [4]
Figure 2. Wildfire propagation versus delay time of extinguishers (at 10 km/hr wind speed)
The endeavour to minimize positioning errors has been the subject of extensive investigation in the literature, and a selection of the most relevant studies is reviewed herein. Complications arise in wildfire scenarios where late interventions can exponentially increase damage. Such delays often stem from the inability of competent authorities to receive early information about the fire's inception, hindering efforts to control it before it escalates into a major conflagration [9]. Consequently, research into wildfire monitoring, detection, and localization continues to be a focal point for global academia.
Initial fire detection techniques relied upon manned observation towers, which proved to be inefficient and largely unsuccessful. Subsequently, camera surveillance systems and satellite imaging technologies were employed to monitor the early stages of surface fires more effectively. While it is possible to position camera networks throughout forests, they are restricted to line-of-sight images and are vulnerable to environmental factors such as weather and physical barriers [10]. In response, the application of Wireless Sensor Network (WSN) technology emerged as a viable solution for early wildfire location and detection, given its adaptability to harsh environments like forests [11, 12].
The literature is abundant with studies on localization. This review, however, focuses specifically on studies that have implemented the trilateration technique in the process of localization in WSNs. Savochkin [13] advanced a modified trilateration method suitable for passive RFID indoor localization systems without necessitating continuous model improvements due to environmental changes. Yet, one notable challenge in wireless signal-based indoor localization lies in non-line-of-sight propagation scenarios. Abd Elgwad and Bassem [14] employed trilateration and fingerprinting localization techniques that relied on the access point's Received Signal Strength (RSS), utilizing a database that comprises path loss and shadowing parameters varying based on the environment.
Crane et al. [15] proposed a filtering method, Emender, capable of identifying noisy Received Signal Strength Indication (RSSI) readings which adversely affect localization performance. Balaji and Chaudhry [16] utilized a modified trilateration system that incorporated cooperative methods and better positioning of beacon nodes to enhance the distance computation process. The trilateration process was expedited using distance values. Kausar and Chattaraj [17] applied the extended Kalman filter and the Kalman filter to filter the data after employing a trilateration technique to identify the closest access point. To reduce reliance on the position of the anchor node and RSSI data in RSSI-based localization, Yang et al. [18] proposed a least-squares curve fitting method, and the localization of the unknown node was determined using the trilateration method.
Advanced trilateration localization algorithms were proposed by Yan et al. [19] and Monta et al. [20], both offering improvements on distance estimation. Liu and Cai [21] and Zhang et al. [22] also reported enhanced trilateration localization methods, with the latter proposing an iterative trilateration approach to maintain localization accuracy. A novel improvement for the trilateration technique using fuzzy logic was developed by El Samadony et al. [23], adding power level as an additional parameter for distance estimation between anchors and nodes.
Despite these notable contributions to improving the accuracy of the trilateration technique, further refinements can be achieved through the application of suitable optimization algorithms to optimize its parameters. This paper considers the use of the Nelder-Mead algorithm for this purpose.
In this research, three key technologies will work simultaneously to achieve the intended goal, which is to provide the position of the unknown nodes accurately. Hence, this section explains these components concisely, including the trilateration technique, the MN optimization method, and anchor-based localization in WSN.
3.1 Trilateration positioning technique
The trilateration technique considers one of the fastest and simple localization algorithms that can be used for estimating the locations of objects. It is a fundamental positioning technique that is frequently utilized in localization systems. For locating the target or the object in this algorithm, at least three anchor nodes are required [24]. A minimum of three non-collinear reference points on a two-dimensional (2D) plane are required for the trilateration technique as shown in Figure 3.
Figure 3. Trilateration positioning concept
A distributed, range-based, anchor-based localization algorithm is trilateration. With the aid of a feature of the transmitting signal from the sender node to the receiving node, trilateration, a range-based algorithm, employs distance estimation to compute the position of nodes in a network. The reformulation of the mathematical operation of the trilateration technique is as follows [25]. For n anchor nodes that are distributed randomly in WSN, their locations are known at:
$\left(x_1-y_1\right),\left(x_2-y_2\right),\left(x_3-y_3\right) \ldots\left(x_n-y_n\right)$ (1)
Assume the location information of the target node is X(xc, yc), is determined using at least three anchor nodes in the 2D space. Hence, the distance from the target node to each known node can be determined according to Pythagoras' theorem as follows:
$D_i=\sqrt{\left(x_c-x_i\right)^2+\left(y_c-y_i\right)^2}$ (2)
where, Di represents the estimated distance of the unknown node, i=1,2,3, ….
Then, the intersection of the three circles is the coordinates of the target far point. The trilateration algorithm is expressed as follows:
$\begin{aligned} & D_1^2=\left(x_c-x_1\right)^2+\left(y_c-y_1\right)^2 \\ & D_2^2=\left(x_c-x_2\right)^2+\left(y_c-y_2\right)^2 \\ & D_3^2=\left(x_c-x_3\right)^2+\left(y_c-y_3\right)^2\end{aligned}$ (3)
where, D1, D2 and D3 are the estimated distances between the anchor nodes and the unknown node. (xc, yc) represents the coordinate of the unknown node, which can be determined by solving Eq. (5), where (xi, yi) denotes the real coordinates of anchor nodes. Although the trilateration technique is simple and has low computational complexity [26], the common challenges of the trilateration technique are including the positioning inaccuracy dramatically increases as a result of environmental interference, noise, and errors in distance estimate, as well as ambiguity in the coordinates of anchor nodes and other unfavorable circumstances such as measuring received signal strength has a changing nature [7]. In addition, it may provide less accuracy due to no line of sight of the transmitted signals that propagate in multipath.
3.2 Nelder-mead optimization algorithm
Similar to Genetic Algorithms (GA) or Particle Swarms (PSO), the Nelder-Mead (NM) [27] or the downhill simplex method is a heuristic optimization method. The issue of locating point (s) in a search space with the ideal value of an objective function is referred to as optimization in this context. A maximum or minimum value could be considered optimal. NM is one of the most well-known methods for multidimensional derivative-free unconstrained optimization. Hence, NM can be used with nondifferentiable functions or in situations where the gradient is unknown due to its independence from the cost function's gradient or any approximation. The search of NM has to find a solution to the following problem:
Minimize $f(z), z \in \mathcal{R}$ (4)
where, R is a set of neighbors’ initial points.
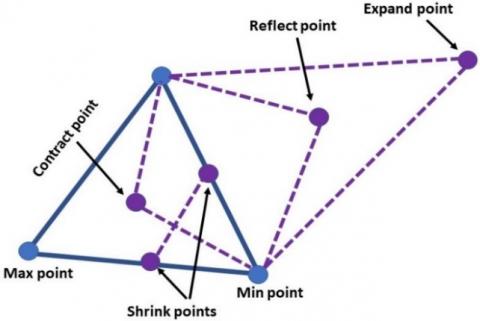
Four essential processes make up the NM method [28, 29], as shown in the shape structure (simplex) in Figure 4, including:
a) Reflection, which means updating the worst point to the opposite direction of the coordinate.
b) Expansion via updating to the farther coordinate.
c) Contraction by moving the point closer to the inner coordinate.
d) Shrinking, which is achieved by updating all the points of coordinates closer to the best point.
The former process can be achieved as follows, first initializing points (n + 1) in the D-dimension search space are z1, z2, …, zn+1. The fitness values of these points are used to organize them in ascending order. Algorithm 1 shows the pseudocode of the NM optimization algorithm [27, 30]. The following formula is used to determine the centroid point x made up of the first n points:
$\tilde{z}=\sum_{j=1}^n \frac{z_j}{n}$ (5)
Then the reflected point zr can be determined as follows:
$z_r=\tilde{z}+\epsilon\left(\tilde{z}-z_{n+1}\right)$ (6)
where, $\epsilon$ represents the coefficient of reflection, and zn+1 denotes the worst point.
Then, to calculate the expansion point ze, the following expression is used.
$z_e=\tilde{z}+\beta\left(z_r-\tilde{z}\right)$ (7)
where, β is the coefficient of expansion at β>max(1, $\epsilon$).
Now, two results are expected either the fitness of the refection point zr is worse than the second worse point zn, which requires to apply inside or outside contraction; or in case of the values of fitness for point zr is best than the worst point zn+1, the operation of outside contraction is executed as follows:
$z_{\text {Cout }}=\tilde{z}+\varphi\left(z_r-\tilde{z}\right)$ (8)
Otherwise, the operation of inside contraction is implemented as follows:
$z_{\text {Cin }}=\tilde{z}+\varphi\left(\tilde{z}-z_{n+1}\right)$ (9)
where, φ refers to the coefficient of contraction at a value of 0<φ<1.
Last but not least, if the values of fitness for the outside contraction zCout is worst compared to the reflection point $z_r$, or when the fitness value inside the contraction zCin is also worse than the zn+1, then the operation of shrinking will be achieved as follows:
$\alpha_j=\tilde{z}+\mu\left(z_j-z_1\right)$ (10)
where, μ is the coefficient of shrinking at a value of 0<μ<1.
|
Algorithm 1: Nelder-Mead optimization |
|
|
Input=Parameters to be optimized, n of input dimensions. |
|
|
Output=Optimum parameters. |
|
|
1: |
Sort vertices $v$ with $f\left(z_1\right) \leq . . \leq f\left(z_n\right) \leq f\left(z_{n+1}\right)$ // Order |
|
2: |
while $f\left(z_{n+1}\right)-f\left(z_1\right)>\epsilon$ |
|
3: |
Compute $\tilde{z}, z_r$, and $f\left(z_r\right)$ |
|
4: |
If $f\left(z_1\right) \leq f\left(z_r\right)<f\left(z_n\right)$ // Reflection |
|
5: |
swap $\left(z_{n+1} \rightleftarrows z_r\right)$; Go to step 28 |
|
6: |
Else if $f\left(z_r\right)<f\left(z_1\right)$ // Expansion |
|
7: |
{Compute $f\left(z_e\right)$ |
|
8: |
If $f\left(z_e\right)<f\left(z_r\right)$ |
|
9: |
swap $\left(z_{n+1} \rightleftarrows z_e\right)$; Go to step aa |
|
10: |
Else swap $\left(z_{n+1} \rightleftarrows z_r\right)$; Go to step 28 |
|
11: |
Endif} |
|
12: |
Else if $f\left(z_n\right) \leq f\left(z_r\right)<f\left(z_{n+1}\right)$ // External contraction |
|
13: |
{Compute $f\left(z_c\right)$ |
|
14: |
If $f\left(z_c\right) \leq f\left(z_r\right)$ |
|
15: |
swap $\left(z_{n+1} \rightleftarrows z_c\right)$; Go to step 28 |
|
16: |
Else Go to step bb} |
|
17: |
Else if $f\left(z_r\right) \geq f\left(z_{n+1}\right)$ // Internal contraction |
|
18: |
{compute $f\left(\widetilde{z_c}\right)$ |
|
19: |
If $f\left(\widetilde{z_c}\right) \leq f\left(z_{n+1}\right)$ |
|
20: |
swap $\left(z_{n+1} \rightleftarrows \widetilde{z}_c\right)$; Go to step 28 |
|
21: |
Else Go to step 23} |
|
22: |
Endif |
|
23: |
For $\mathrm{i}=2$ to $\mathrm{n}+1$ // Shrink |
|
24: |
$\left\{z_j=\left(z_1+z_j\right) / 2\right.$ |
|
25: |
Compute $f\left(z_j\right)$ |
|
26: |
Sort vertices $v$ with $f\left(z_1\right) \leq . . \leq f\left(z_n\right) \leq f\left(z_{n+1}\right)$ |
|
27: |
} |
|
28: |
Sort vertices $v$ with $f\left(z_1\right) \leq . . \leq f\left(z_n\right) \leq f\left(z_{n+1}\right)$ |
|
29: |
End |
Figure 4. The heuristic search process of the NM algorithm
3.3 Anchor-based localization in WSN
To begin the monitoring task and communicate data nearby the area, each node in a wireless sensor network must be located. Randomly distributing each node in the region is one technique that has been applied in challenging and inhospitable locations. Some nodes known as anchor nodes or reference nodes can know their positions as they are equipped with GPS technology. It is worth stating that it is impractical to deploy the entire network nodes with the GPS. This is because the GPS is considered a high-power consumption system. In addition, in some settings, GPS may not be available. In other words, some harsh environments may prevent the use of GPS [31]. The reader is referred to some researchers [32-34] for more details regarding GPS challenges. Hence, in special circumstances, the application of the anchor node technique outweighs the corresponding fully GPS-based localization system. Hence, the rest of the nodes in WSN have to derive their locations according to the information of nearby anchor nodes' coordinates. Trilateration is one of the key techniques that have been used by sensor nodes to estimate their physical position in WSN. However, the trilateration technique has some challenges as shown earlier in Section 3.1.
Assume N represents the number of static anchor nodes (xi, yi) at i equals 1, 2, ... N and M denotes the number of unknown position static sensor nodes (xc, yc), that are deployed in a rectangular shape forest of dimensions 100 m×100 m for experimentation. In fact, the ideal distribution of nodes should be uniform to cover the entire area of the forest, and this may apply to small and reachable areas. However, with large-scale areas, the deployment of such a system is very expensive in terms of cost, processing, and energy. Hence, in this research, the random distribution is used to mimic the practical system in large forests. The deployed type of sensor is a dual sensor that can detect both smoke and heat. The proposed system is formulated with (N<M) nodes as shown in green color in Figure 5. To maintain the coverage between the unknown sensor nodes with the nearby anchor nodes, a hexagonal shape topology is used, where it is assumed that each anchor node can handle the unknown sensor nodes that are located within its hexagonal area and each anchor node can communicate with the neighbor anchor nodes. To determine distance, RSSI uses the received signal strength. It is an effective option for signal processing that requires less power and complexity. Since RSSI is based on signal attenuation, it is categorized as a range-based approach. The signals traveled farther, attenuating more as they did so. Hence, RSSI is inversely proportional to the corresponding distance. To maintain a suitable execution environment, the proposed optimized localization approach is run utilizing a high-processing capability tool built on cloud computing, where in the era of IoT there is an uncountable number of applications utilizing capabilities of cloud computing [35].
Figure 5. The structure of the proposed localization system areas
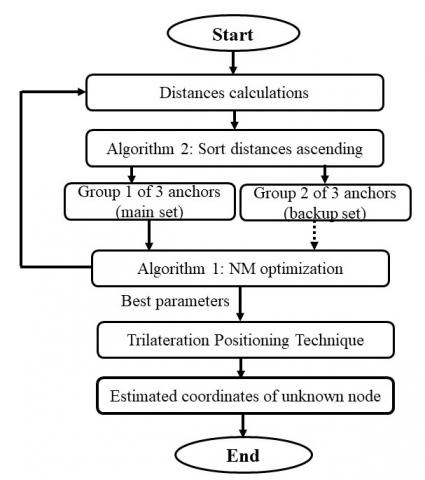
Although both the NM optimization algorithm and the trilateration localization approach have different operation concepts, they are somewhat like each other in the initial points and in finding one objective point. Hence, the NM algorithm is proposed to enhance the positioning accuracy of the trilateration approach by finding the best location of the target unknown node. Figure 6 illustrates the flowchart of the proposed localization algorithm.
Figure 6. Flowchart of the proposed algorithm
In fact, finding the intersection of three circles with radii centered on each reference node that equals the distance achieved is the key problem of the trilateration method. To obtain distance information, the concept of the path loss model along with the RSSI is used. RSSI is an advantageous option for signal processing in WSN as it requires less power and low complexity [7]. The distance calculation [33] is as follows.
$L=32.44+10 \log (D)+10 n \log (\omega)$ (11)
where, L is signal energy path loss; Di is the signal transmission distance (m); ω is the wireless signal frequency (MHz); n represents the path attenuation factor in the actual environment. Unlike the free space due to obstacles and other real environmental factors, the channel attenuation will follow a lognormal distribution. Hence, the path loss model will be expressed as follows.
$P_L(D)=P_L\left(D_0\right)+10 n \log \left(\frac{D}{D_0}\right)+G_\alpha$ (12)
where, PL(D) is the path loss of the received signal at a distance in meters, PL(D0) is the path loss at D0; n indicated the path loss index in a particular environment, where the speed of path loss when the distance is increased; Gα is a zero-mean, uniformly distributed random variable with a standard deviation of α (in dB). Now, to find the RSSI at nodes, the following expression can be used.
$R S S I=P_t-P_L(D)$ (13)
where, Pt represents the transmission power. The value of RSSI at D0 is as follows.
$I=P_t-P_L\left(D_0\right)$ (14)
From Eqs. (12), (13), and (14), the RSSI can be determined as follows.
$R S S I=I-10 n \log \left(\frac{D}{D_0}\right)-G_\alpha$ (15)
Assume the initial distance D0 is 1 m, then the value of the distance of RSSI at several measurement values can be calculated as follows.
$D=10^{(I-R S S I) / 10 n}$ (16)
In the case of involving more than three anchor nodes in the operation of calculation in the trilateration positioning algorithm, only three active and most correlated anchor nodes are chosen to form a trilateration calculation group. In Algorithm 2 two tasks are achieved. First, nominating three anchor nodes as well as in case of failure of any node, there is a redundant anchor that can be substituted to accomplish the process of the trilateration algorithm. In other words, in case of the shutdown of one or more essential anchor nodes from the fire effect, three backups had been chosen for this purpose as shown in Algorithm 2.
The NM optimization algorithm is applied to enhance the accuracy of the localization process of the trilateration technique. The NM Method is employed to reduce location estimation error while considering the distance between three anchor nodes. As stated earlier, the core idea behind the MN algorithm is that the original triangle can be mirrored, enlarged, or contracted as the iterations proceed. The function that will be minimized is expressed in Eq. (17).
$\begin{aligned} f\left(x_c, y_c\right) & =\left|\left(x_c-x_1\right)^2+\left(y_c-y_1\right)^2-D_1^2\right| \\ & +\left|\left(x_c-x_2\right)^2+\left(y_c-y_2\right)^2-D_2^2\right| \\ & +\left|\left(x_c-x_3\right)^2+\left(y_c-y_3\right)^2-D_3^2\right|\end{aligned}$ (17)
|
Algorithm 2: Selecting the best two successive sets of correlated anchor nodes |
|
|
Input=The total number of anchor nodes in the entire network (N). The number of anchor nodes within the coverage range (K), the ID of each anchor node, and RSSI. |
|
|
Output=Group of the first three of the most related anchor nodes. |
|
|
1: |
For Z=1 to K |
|
2: |
{For ID=1 to N |
|
3: |
Measure RSSI according to Eq. (15) |
|
4: |
Measure corresponding distance (D) according to Eq. (16) |
|
5: |
Q[ , ]=(D, ID) } |
|
6: |
Sort ascending (Q[ , ]) |
|
7: |
Anchor_main 1:(AN1=Q[D(1), ID(1)]) |
|
8: |
Anchor_main 2:(AN2=Q[D(2), ID(2)]) |
|
9: |
Anchor_main 3:(AN3=Q[D(3), ID(3)]) |
|
10: |
Anchor_backup 4:(AN4=Q[D(4), ID(4)]) |
|
11: |
Anchor_backup 5:(AN5=Q[D(5), ID(5)]) |
|
12: |
Anchor_backup 6:(AN6=Q[D(6), ID(6)]) |
|
13: |
For i=1 to 3 |
|
14: |
{If (RSSI_AN(i) ≈ 0) |
|
15: |
Swap (AN(i) ↔ AN(i+3)) |
|
16: |
End if} |
|
17: |
Return (3 anchor nodes) |
|
18: |
End |
The simulation setup is conducted using the proposed network scenario shown in Figure 5 of Section IV. The parameter settings are illustrated in Table 1. The performance evaluation of the proposed approach is focused on the localization accuracy of the unknown node. The system is first tested with only the conventional trilateration algorithm. Then to measure the enhancement and compare the obtained results of the proposed approach, the optimized trilateration-based NM algorithm is tested.
Table 1. Simulation parameters settings
|
Parameters |
Value |
|
Simulation area |
100×100 m |
|
No. of anchor nodes |
3-14 |
|
No. of unknown nodes |
20 |
|
Height of node |
1 m |
|
Temperature threshold |
≥40° |
|
Types of sensors |
Heat and smoke detector |
|
Trilateration intersecting type |
Two dimensions (2D) with three circles |
|
Initial values of the NM algorithm |
Three calculated distances D1, D2 & D3 |
For evaluating localization accuracy, the Mean Absolute Error (MAE) is used as a criterion. The MAE as illustrated in Eq. (18) is used to compare the estimated and the actual coordinates of the M unknown nodes.
$M A E=\left(\frac{1}{M}\right) \sum_{i=1}^M\left|\left(x_i-\hat{x}\right)^2+\left(y_i-\hat{y}\right)^2\right|$ (18)
where, (xi, yi) is the actual coordinates; $(\hat{x}, \hat{y})$ is the estimated coordinates; M: is the total number of unknown nodes. The first test is related to exemplify the relationship between the RSSI and the distance of the node. Figure 7 shows that there is an inverse relationship between the RSSI value with the corresponding distance. In other words, the maximum RSSI refers to the nearest sensor node. Figure 8 illustrates the simulation test of both the conventional trilateration technique and the optimized trilateration-based NM algorithm. It can be noticed the amount of improvement with the proposed method.
Table 2. The average error in the estimated distance of the unknown node (m)
|
Approach |
3 Anchors |
7 Anchors |
14 Anchors |
|
Traditional trilateration |
19.3 |
13.1 |
8.47 |
|
Trilateration based NM |
9.08 |
4.2 |
1.4 |
Table 2 illustrates the average estimated average error with the traditional trilateration algorithm and with the optimized traditional using the NM optimization algorithm. It can be noticed that the improvement in the accuracy with the proposed Trilateration based NM is around 53% at 3 anchor nodes and up to 68% at 7 anchor nodes while when the number of anchors is doubled, the improvement is up to 83%.
Table 3 presents a brief comparison with the related literature of the same scope of the proposed work. The comparison is achieved to test the performance with only three anchor nodes in the outdoor environment.
Table 3. Result in comparison with related works
|
Reference |
Algorithm |
Average Percentage of Accuracy Improvement |
|
[7] |
Trilateration + K-Means |
18.5% |
|
[13] |
Trilateration + Fingerprinting |
49% |
|
[14] |
Trilateration + Signal Filter |
32% |
|
[15] |
Trilateration + cooperative technique |
%10 |
|
[18] |
Trilateration + optimized anchor nodes selection |
20.51% |
|
[20] |
Trilateration + weighted centroid localization |
16% |
|
[23] |
Trilateration + Fuzzy logic |
33% |
|
Proposed Algorithm |
Trilateration + NM optimization |
53% |
Although the applied NM algorithm works without the calculation of derivatives, which is an advantageous point, it is worth stating that the cost of improving the accuracy of the trilateration technique in this work comes with a relative increase in the computational complexity of the entire localization algorithm, which may be generated from the additional processing of the NM algorithm. Nevertheless, the application of a cloud-based environment can address this issue.
Figure 7. The correlation of RSSI value and the estimated distance
Figure 8. Location error versus number of anchor nodes
Wildfires pose a significant threat to sustainability and the overall ecosystem, necessitating swift intervention due to their deleterious impacts. An effective response calls for the development of a localization system capable of accurately estimating the positions of static nodes proximate to the fire, thereby minimizing possible positioning errors. To enhance the accuracy of this localization, a modified trilateration localization technique predicated on the Nelder-Mead (NM) optimization algorithm is proposed.
Simulation results, as depicted in Table 2, demonstrate an improvement in the performance of the proposed method in terms of accuracy. This enhancement reaches up to 1.4 m when 14 anchor nodes are employed, representing an 83% improvement compared to the conventional approach. These results suggest that the accuracy of the unknown node's location is directly proportional to the number of anchor nodes deployed in the network. This correlation can be attributed to the fact that these anchor nodes possess pre-existing positional information.
Despite the additional overhead introduced by the optimization algorithm, this can be counterbalanced through the utilization of the processing power offered by cloud computing. Future work in this field could incorporate the use of Machine Learning (ML) or Deep Learning (DL) algorithms to predict wildfire location regions across different seasons. Another potential avenue for exploration involves the development of a drone network capable of acting as real-time extinguishers. These drones could receive location data from cloud computing systems and respond in a timely manner, adding an additional layer of responsiveness to wildfire management.
[1] Kuraži, D.Š., Kosović, I.N., Herceg-Bulić, I. (2022). A review of forest fire research directions: Different approaches for one goal. Geofizika, 39(1): 1-23. https://doi.org/10.15233/gfz.2022.39.7
[2] Dampage, U., Bandaranayake, L., Wanasinghe, R., Kottahachchi K., Jayasanka, B. (2022). Forest fire detection system using wireless sensor networks and machine learning. Scientific Reports, 12(1): 1-11. https://doi.org/10.1038/s41598-021-03882-9
[3] San-Miguel-Ayanz, J., the EFFIS Team. (2022). Monitoring of forest fires (wildfires) in Europe: The European Forest Fire Information System (EFFIS), available online: http://www.europarc.org/wp-ontent/uploads/2022/05/EFFIS_GWIS_-wildfire-management-webinar.pdf, accessed on Dec. 29, 2022.
[4] Cruz, M.G., Alexander, M.E. (2019). The 10% wind speed rule of thumb for estimating a wildfire’s forward rate of spread in forests and shrublands. Annals of Forest Science, 76(2): 1-11. https://doi.org/10.1007/s13595-019-0829-8
[5] Yang, B., Guo, L.Y., Guo, R.J., Zhao, M.M., Zhao, T.A. (2020). Novel trilateration algorithm for RSSI-based indoor localization. IEEE Sensors Journal, 20(14): 8164-8172. https://doi.org/10.1109/JSEN.2020.2980966
[6] Paul, K., Sato, T. (2017). Localization in wireless sensor networks: A survey on algorithms, measurement techniques, applications and challenges. Journal of Sensor and Actuator Networks, 6(4): 24. https://doi.org/10.3390/jsan6040024
[7] Luo, Q.H., Yang, K.X., Yan, X.Z., Li, J.F., Wang, C.X., Zhou, Z.Q. (2022). An improved trilateration positioning algorithm with anchor node combination and K-Means clustering. Sensors, 22(16): 6085. https://doi.org/10.3390/s22166085
[8] Bertanha, M., Pazzi, R.W. (2017). Joint range-based localization using trilateration and packet routing in wireless sensor networks with mobile sinks. In 2017 IEEE Symposium on Computers and Communications (ISCC), Heraklion, Greece, pp. 645-650. https://doi.org/10.1109/ISCC.2017.8024601
[9] Lutakamale, S.A., Kaijage, S. (2017). Wildfire monitoring and detection system using wireless sensor network: A case study of Tanzania. Wireless Sensor Network, 9(8): 274-289. https://doi.org/10.4236/wsn.2017.98015
[10] Alkhatib, A. (2013). Smart and low cost technique for forest fire detection using wireless sensor network, International Journal of Computer Applications, 81(11): 12-18. https://doi.org/10.5120/14055-2044
[11] Al-Hilfi, H.I.M., Al-Nayar, M.M.J. (2022). Increase the WSN-lifespan used in monitoring forest fires by PSO. Mathematical Modelling of Engineering Problems, 9(3): 583-590. https://doi.org/10.18280/mmep.090304
[12] Ahmad, I.A., Al-Nayar, M.M.J., Mahmood, A.M. (2022). Investigation of energy efficient clustering algorithms in WSNs: A review. Mathematical Modelling of Engineering Problems, 9(6): 1693-1703. https://doi.org/10.18280/mmep.090631
[13] Savochkin, D.A. (2014). Simple approach for passive RFID-based trilateration without offline training stage. In 2014 IEEE RFID Technology and Applications Conference (RFID-TA), Tampere, Finland, pp. 159-164. https://doi.org/10.1109/RFID-TA.2014.6934220
[14] Abd Elgwad, M., Bassem, I. (2019). Wi-Fi based indoor localization using trilateration and fingerprinting methods. In IOP Conference Series: Materials Science and Engineering, 610(1): 012072. https://doi.org/10.1088/1757-899X/610/1/012072
[15] Crane, P., Huang, Z.Y., Zhang, H.B. (2016). Emender: Signal filter for trilateration based indoor localization. In 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, New York. https://doi.org/10.1109/PIMRC.2016.7794742
[16] Balaji, M., Chaudhry, S.A. (2018). A cooperative trilateration technique for object localization. In 2018 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon, Korea (South), pp. 758-763. https://doi.org/10.23919/ICACT.2018.8323912
[17] Kausar, H., Chattaraj, S. (2022). On some issues in Kalman filter based trilateration algorithms for indoor localization problem, In 2022 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Thiruvananthapuram, India1, pp. 431-435. https://doi.org/10.1109/SPICES52834.2022.9774037
[18] Yang, Q., Han, Q.W., Han, Q.L., Yang, F.W. (2020). Received signal strength indicator-based indoor localization using distributed set-membership filtering. IEEE Transactions on Cybernetics, 52(2): 727-737. https://doi.org/10.1109/TCYB.2020.2983544
[19] Yan, X.Z., Luo, Q.H., Yang, Y.P., Liu, S.C., Li, H.P., Hu, C. (2019). ITL-MEPOSA: Improved trilateration localization with minimum uncertainty propagation and optimized selection of anchor nodes for wireless sensor networks. IEEE Access, 7: 53136-53146. https://doi.org/10.1109/ACCESS.2019.2911032
[20] Monta, S., Promwong, S., Kingsakda, V. (2016). Evaluation of ultra wideband indoor localization with trilateration and min-max techniques. In 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, pp. 1-4. https://doi.org/10.1109/ECTICon.2016.7561496
[21] Liu, Y.J., Cai, M. (2015). A trilateral centroid localization and modification algorithm for wireless sensor network. In: Wong, W. (eds), Proceedings of the 4th International Conference on Computer Engineering and Networks. Lecture Notes in Electrical Engineering, vol 355. Springer, Cham. https://doi.org/10.1007/978-3-319-11104-9_12
[22] Zhang, X.H., Fang, J.L., Meng, F.F. (2016) An efficient node localization approach with RSSI for randomly deployed wireless sensor networks. Journal of Electrical and Computer Engineering, 2016: 1-11. https://doi.org/10.1155/2016/2080854
[23] El Samadony, B.R., Ramadan, R.A., Darwish, N.M. (2015). Enhanced trilateration localization using fuzzy logic for WSN. International Journal of Emerging Technology and Advanced Engineering, 5(6): 378-385.
[24] Paul, A.K., Sato, T. (2017). Localization in wireless sensor networks: A survey on algorithms, measurement techniques, applications and challenges. Journal of Sensor and Actuator Networks, 6(4): 24. https://doi.org/10.3390/jsan6040024
[25] Liu, W., Xiong, Y.Y., Zong X.L., Siwei, W. (2018). Trilateration positioning optimization algorithm based on minimum generalization error. In 2018 IEEE 4th International Symposium on Wireless Systems within the International Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Lviv, Ukraine, pp. 154-157. https://doi.org/10.1109/IDAACS-SWS.2018.8525748
[26] Jondhale, S.R., Jondhale, A.S., Deshpande, P.S., Lloret, J. (2021). Improved trilateration for indoor localization: Neural network and centroid-based approach. International Journal of Distributed Sensor Networks, 17(11). https://doi.org/10.1177/15501477211053997
[27] Nelder, J.A., Mead, R. (1965). A simplex method for function minimization. The Computer Journal, 7(4): 308-313. https://doi.org/10.1093/comjnl/7.4.308
[28] Li, W., Luo, H.N., Wang, L., Jiang, Q.Y., Xu, Q.Z. (2022). Enhanced brain storm optimization algorithm based on modified Nelder–mead and elite learning mechanism. Mathematics, 10(8): 1303. https://doi.org/10.3390/math10081303
[29] Kitaoka, H., Amano, K.I., Nishi, N., Sakka, T. (2022). Improvement of the Nelder-mead method using direct inversion in iterative subspace. Optimization and Engineering, 23(2): 1033-1055. https://doi.org/10.1007/s11081-021-09620-4
[30] Sacco, W.F., Alves Filho, H., Henderson, N., de Oliveira, C.R. (2008). A Metropolis algorithm combined with Nelder–Mead Simplex applied to nuclear reactor core design. Annals of Nuclear Energy, 35(5): 861-867. https://doi.org/10.1016/j.anucene.2007.09.006
[31] Paul, A.K., Sato, T. (2017). Localization in wireless sensor networks: A survey on algorithms, measurement techniques, applications and challenges. Journal of Sensor and Actuator Networks, 6(4): 24. https://doi.org/10.3390/jsan6040024
[32] Jyoti, R.Y., Singh, N. (2013). Localization in WSN using modified trilateration based on fuzzy optimization. International Journal of Advanced Research in Computer Science and Software Engineering, 3(7): 657-663.
[33] Nandutu, I., Atemkeng, M., Okouma, P. (2022). Intelligent systems using sensors and/or machine learning to mitigate wildlife–vehicle collisions: A review challenges, and new perspectives. Sensors, 22(7): 2478. https://doi.org/10.3390/s22072478
[34] Shang, F.J., Su, W., Wang, Q., Gao, H.X., Fu, Q.A. (2014). Location estimation algorithm based on RSSI vector similarity degree. International Journal of Distributed Sensor Networks, 10(8): 371350. https://doi.org/https://doi.org/10.1155/2014/371350
[35] Nasser, A.R., Mahmood, A.M. (2021). Cloud-based Parkinson’s disease diagnosis using machine learning. Mathematical Modelling of Engineering Problems, 8(6): 915-922. https://doi.org/10.18280/mmep.080610