Arsit Boonyaprapasorn | Suwat Kuntanapreeda | Parinya Sa Ngaimsunthorn | Tinnakorn Kumsaen | Thunyaseth Sethaput*
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The Hepatitis-B (HBV) epidemic's dynamic can be presented as a compartment model. Determining the HBV epidemic control strategy can be considered a nonlinear feedback control problem. The sliding mode controller (SMC) is an effective feedback control method for controlling the dynamical system under disturbances. Recently, the SMC based on fractional order calculus can provide preferable characteristics for a control system such as robustness and convergence rate. In this study, the HBV epidemic system's control policy is proposed using the fractional order sliding mode controller (FOSMC). The control policy with multiple measures including vaccination, isolation, and treatment is formulated to manipulate the susceptible and the infected subpopulations to the desired level. The Lyapunov-based approach is proven for stability analysis. The control policy is applied to the simulation example to verify the feasibility of the proposed FOSMC method. The simulation results are compared with those of the integer order SMC. By the proposed method, the results reveal that the susceptible and infected subpopulations are driven to the desired levels under disturbances with a higher convergence rate compared to that of the integer one. Moreover, the proposed FOSMC method can reduce the chattering occurrence which is the primary drawback of the SMC method.
Hepatitis B, epidemic disease, fractional order calculus, sliding mode control, feedback control
Hepatitis B is one of the most prevalent infectious diseases and concerns public health on a worldwide scale. Recently, the worldwide prevalence of Hepatitis B virus (HBV) is about 292 million people [1]. There are considerable regional differences in the prevalence of infection. In Africa, there is the highest prevalence of HBV infection, followed by Central Asia and the Southeast Asia region [1, 2]. Acute and chronic liver illness can both be caused by HBV infection. The chronic illness might progress to cirrhosis and liver cancer in the infected person [3]. Nowadays, the primary route of HBV transmission is transmitted vertically (mother-to-child) which accounts for roughly 50% of total cases [4, 5]. Therefore, it is essential to develop control strategies to prevent HBV infection and subsequently restrict its transmission. HBV epidemic control can be achieved via different measures. This includes vaccination, treatment, and isolation [6]. Vaccination is the most successful strategy to decrease the prevalence of chronic HBV infection and control mother-to-child transmission [7]. For newborns, HBV vaccines are recommended as routine immunizations in many countries [8-11]. Within 24 hours of birth, infants should receive their first dose of the HBV vaccine for perinatal HBV transmission prevention [12]. For HBV treatment, the primary objective is to reduce the onset of liver fibrosis which might develop into cirrhosis and liver cancer [12, 13]. Additionally, controlling infectious disease epidemics by isolation measures is an effective preventive strategy [14].
A compartmental model is commonly constructed to mathematically represent the dynamic transmission of HBV. Medley et al. [15] developed a SECIR mathematical model to observe the HBV transmission mechanism. This model was also applied to evaluate the epidemic situation in New Zealand [16] and Canada [17]. Pang et al. [18] modified Medley et al.’ model to investigate how control strategies affect HBV transmission. Additionally, a four-compartmental model was developed to predict new HBV case numbers in China [19].
In the model, the control policy which consists of multiple measures can be obtained by the optimal control based on Pontryagin’s maximum principle [6, 20-23]. However, using this approach to set the control policy requires an accurate model. Moreover, finding the policy in analytical form is complex when the model contained nonlinear terms and the order of the model is high. Based on compartmental model representation, the feedback control approach is simpler to synthesize the control policy in the analytical form [24]. Also, feedback control is suitable for locating the policy for the model with disturbances and uncertainties. As mentioned in [25], the control strategy according to feedback control can handle uncertainties and disturbances which occur in the biological system. Also, it is not complicated to determine a control strategy in an analytical form. These aspects are advantages compared to dynamic optimization. The control strategies for many epidemic diseases including HBV diseases have been synthesized using nonlinear control techniques presented in previous works [24-34].
One of the nonlinear control techniques used in applications for epidemic control is sliding mode control (SMC) [24, 26, 27, 29, 32, 35]. The robustness is an attractive property of the SMC method. However, as noted in the literature [35-37], the fundamental problem of the SMC approach is that it causes chattering, or high frequency in the control input signal. To overcome the disadvantage, fractional order sliding mode control (FOSMC) is proposed as one of the enhanced versions of the SMC method. In the FOSMC, the improvement in terms of chattering reduction [37] and fast response [38-43], is achievable through the concept of fractional order calculus [44]. With these advantages, the FOSMC was utilized in several applications such as aerospace [45-48], missile guidance [49-51], automotive [52-53], robotic [40, 54-57], energy, and power systems [58-61]. Also, the SEIR epidemic model's vaccination control policy was established by the FOSMC [62-63].
In accordance with the study [6, 20-23], various measures can be applied for eradicating the HBV epidemic. Consequently, the control policy for the HBV epidemic systems is formulated from various measures. The well-known feedback controls such as synergetic control and time-varying sliding mode control (TVSMC) have been employed to set the control policies containing various measures in an analytical form as presented in studies [32, 34]. However, the robustness of the control epidemic systems has not been investigated in prior research.
This study, according to the feasibility to apply feedback control for setting the epidemic control policy or strategy and the advantages of the FOSMC method. The control policy to eradicate the epidemic of HBV based on the FOSMC method is proposed.
Following is an overview of the study's motivations.
-To the best of the authors’ knowledge, the FOSMC method has not been developed for the HBV epidemic systems in any previous studies.
-In the research [63-64], the FOSMC approach was used to set the epidemic control policy with only one control input (vaccination) which is a single input single output (SISO) control system. The focus of these studies [62, 63] has not explored the control strategies with multiple control inputs known as a multiple input multiple output (MIMO) system.
In the research [32, 34], the control system’s robustness is not investigated for controlling the HBV epidemic system.
The subsequent sections of the article are structured as follows. In Section II, the mathematical model representing the HBV epidemic, related background about fractional order calculus, FOSMC controller design, and proof of stability are presented. Section III shows the simulation results and discussion corresponding to the control system under the proposed control. This research’s conclusion is stated in Section IV.
2.1 Mathematical model
The HBV control policy can be set using a feedback controller approach based on the HBV compartmental model presented in the study [6], which was used to synthesize the control policy with multiple measures based on the FOSMC method. To demonstrate the dynamic behavior of HBV, this mathematical model is provided with four differential equations as presented in Eq. (1). The nonlinear model includes four epidemiological groups that are susceptible (S(t)) individuals who are susceptible to HBV infection, acute infected (I1(t)) individuals with the highly infectious preliminary phase of HBV infection, chronical infected (I2(t)) who can either spread disease or are not infectious, and recovered (R(t)) individuals who have recovered from the acute and chronical infected stage. The aim of the control strategy is to minimize the classes of susceptible, acute infected, and chronical infected subpopulations while increasing the number of recovered subpopulations. To achieve the set objectives, the measures for controlling the HBV epidemic of the model are isolation policy (u1(t)), treatment policy (u2(t)), and vaccination policy (u3(t)).
$\dot{S}=b-\alpha S I_1\left(1-u_1\right)-\mu_0 S-u_3 S$
$\dot{I}_1=\alpha S I_2\left(1-u_1\right)-\left(\mu_0+\beta+\gamma_1\right) I_1-\left(u_2+u_3\right) I_1$
$\dot{I}_2=\beta I_1-\left(\mu_0+\mu_1+\gamma_2\right) I_2-\left(u_2+u_3\right) I_2$
$\dot{R}=\gamma_1 I_1+\gamma_2 I_2+u_3 S-\mu_0 R+\left(u_2+u_3\right)\left(I_1+I_2\right)$ (1)
The model’s parameters are denoted as follows. Parameters b and μ0 represent the birth rate and the natural death of susceptible subpopulations respectively. The parameter α defines the rate at which the susceptible subpopulation moves to the acute infected subpopulation. The parameter β represents the moving rate from the acute infected subpopulation to the chronical infected subpopulation. The parameters γ1 and γ2 define the recovery rate from the acute and chronical infected subpopulation to the recovered subpopulation. The parameter μ1 denotes the death rate caused by HBV which involved the growth rate of chronic subpopulation. The constraints of all measures of the control policy are unity constraints and are defined as 0≤u1≤1, 0≤u2≤1, and 0≤u3≤1. Importantly, the nonnegative initial condition of all subpopulations is assumed as S(0)≥0, I1≥0, I2≥0, and R(0)≥0.
The compartment model can be expressed in the nonlinear affine state-space system. The state and the control vectors are defined as x(t)=[x1x2x3x4]T=[SI1I2R]T and u(t)=[u1u2u3]T, respectively. The model can be represented using matrices and vectors:
$\left[\begin{array}{l}\dot{x}_1 \\ \dot{x}_2 \\ \dot{x}_3 \\ \dot{x}_4\end{array}\right]=\left[\begin{array}{l}f_1(x) \\ f_2(x) \\ f_3(x) \\ f_4(x)\end{array}\right]+\left[\begin{array}{lll}g_{11}(x) & g_{12}(x) & g_{13}(x) \\ g_{21}(x) & g_{23}(x) & g_{33}(x) \\ g_{31}(x) & g_{32}(x) & g_{33}(x) \\ g_{41}(x) & g_{42}(x) & g_{43}(x)\end{array}\right]\left[\begin{array}{l}u_1 \\ u_2 \\ u_3\end{array}\right]$ (2)
where,
$f_1(x)=b-\alpha x_1 x_3-\mu_0 x_1$
$f_2(x)=\alpha x_1 x_3-\left(\mu_0+\beta+\gamma_1\right) x_2$
$f_3(x)=\beta x_2-\left(\mu_0+\mu_1+\gamma_2\right) x_3$
$f_4(x)=\gamma_1 x_2+\gamma_2 x_3+\mu_0 x_4$
$g_{11}(x)=\alpha x_1 x_3, g_{12}(x)=0, g_{13}(x)=-x_1$
$g_{21}(x)=-\alpha x_1 x_3, g_{22}(x)=-x_2, g_{23}(x)=-x_2$
$g_{31}(x)=0, g_{32}(x)=-x_3, g_{33}(x)=-x_3$
$g_{41}(x)=0, g_{42}(x)=\left(x_2+x_3\right), g_{43}(x)=\left(x_1+x_2+x_3\right)$
2.2 Fractional order calculus
As the design process of FOSMC design involved fractional order derivative, important definitions and related basic knowledge about fractional derivative operators are summarized as follows.
The definition of the integro-differential equation operator is presented in the study [64-71]:
${ }_a D_t^\lambda f(t)=\left\{\begin{array}{c}\frac{d^\lambda}{d t^\lambda} f(t), \operatorname{Re}(\lambda)>0 \\ f(t), \operatorname{Re}(\lambda)=0 \\ \int_a^t f(\tau)(d \tau)^{-\lambda}, \operatorname{Re}(\lambda)<0\end{array}\right.$ (3)
The order $\lambda$ could be real or complex number. The upper and lower limit of operation are denoted by a and t. Three common definitions of fractional order derivative are presented as follows [64-71]:
Riemann Louisville’s definition
${ }_a D_t^\lambda f(t)=\frac{1}{\Gamma(n-\lambda)} \frac{d^n}{d t^n} \int_a^t \frac{f(\tau)}{(t-\tau)^{\lambda-n+1}} d \tau$ (4)
where, $D_t^\lambda$ is the differentiation operator and $p$ represents the fractional order of the derivative and define as n-1<λ<n. The variable $\Gamma$ is a gamma function.
Caputo’s definition
${ }_a D_t^\lambda f(t)=\frac{1}{\Gamma(n-\lambda)} \int_a^t \frac{f^{(n)}(\tau)}{(t-\tau)^{\lambda-n+1}} d \tau$ (5)
The term n in Eq. (4) and Eq. (5) denotes the order of derivative.
Grunwald-Letnikov’s definition
${ }_a D_t^\lambda f(t)=\lim _{h \rightarrow 0} h^{-\lambda} \sum_{i=0}^{[(t-a) / h]}(-1)^{-i}\left(\begin{array}{c}\lambda \\ i\end{array}\right) f(t-i h)$ (6)
where, [(t-a)/h] refers to the integer part of (t-a)/h.
In this study, the definition of Caputo’s fractional order derivative was utilized in the FOSMC controller design procedure.
2.3 Control objectives
As presented in the study [6], the aim of the policy is to minimize the classes of susceptible subpopulation, acute infected subpopulation, and chronical infected subpopulation. Thus, the control goal of designing feedback controls is to minimize the error between each of these subpopulations and the corresponding desired level. The errors can be expressed as
$e_i=x_i-x_{i r}$ (7)
where, xri=0 for i=1,2,3 are desired levels of susceptible, acute infected, and chronical infected subpopulations.
2.4 Controller design procedure
According to references [45, 59, 73, 74], the FOSMC design procedure for setting the HBV control policy is summarized as follows:
First, select the sliding surface. From the structure of the compartmental model in Eq. (2), the sliding surface is defined according to the fractional order sliding surface presented in the study [55] as
$s_i=D^{1-\lambda}\left(e_i(t)\right)+k_{I i} D^{-\lambda}\left(e_i(t)\right)$ (8)
Second, synthesize control inputs based on the reaching law [39]:
$\dot{s}_i=\theta_i$ (9)
where, θi=-[kswi sign(si)+kspisi] for i=1,2,3. From the properties of fractional order derivative’s definition, Eq. (9) can be obtained as
$D^{1-\lambda} D^\lambda\left[D^{1-\lambda} e_i(t)+k_{I i} D^{1-\lambda} e_i(t)\right]=\theta_i$ (10)
Substituting the dynamic from Eq. (2) into Eq. (10) yields
$D^{1-\lambda}\left[f_i(x)-\dot{x}_{i r}+e_i\right]+D^{1-\lambda} \sum_{j=1}^3 g_{i j} u_j=-\theta_i$
$D^{1-\lambda} \sum_{j=1}^3 g_{i j} u_j=-D^{1-\lambda}\left[f_i(x)-\dot{x}_{i r}+e_i\right]-\theta_i$
$\sum_{j=1}^3 g_{i j} u_j=v_i$ (11)
where, $v_i=-\left[f_i(x)-\dot{x}_{i r}+e_i\right]-D^{\lambda-1} \theta_i$ for i=1,2,3. Eq. (11) can be expressed in a matrix form and solved as
$\left[\begin{array}{lll}g_{11}(x) & g_{12}(x) & g_{13}(x) \\ g_{21}(x) & g_{22}(x) & g_{23}(x) \\ g_{31}(x) & g_{32}(x) & g_{33}(x)\end{array}\right]\left[\begin{array}{l}u_1 \\ u_2 \\ u_3\end{array}\right]=\left[\begin{array}{l}v_1 \\ v_2 \\ v_3\end{array}\right]$
$\left[\begin{array}{l}u_1 \\ u_2 \\ u_3\end{array}\right]=\left[\begin{array}{lll}g_{11}(x) & g_{12}(x) & g_{13}(x) \\ g_{21}(x) & g_{22}(x) & g_{23}(x) \\ g_{31}(x) & g_{32}(x) & g_{33}(x)\end{array}\right]^{-1}\left[\begin{array}{l}v_1 \\ v_2 \\ v_3\end{array}\right]$ (12)
2.5 Proof of stability
According to the control input presented in Eq. (12), the Lyapunov stability theorem is used to demonstrate the stability of the HBV epidemic control system. The Lyapunov function is selected as
$V=s^T s=0.5 \sum_{i=1}^3 s_i^2$ (13)
The derivative of Eq. (13) is calculated as
$V=s^T \dot{s}=s^T\left(D^{1-\lambda} D^\lambda s\right)$
$=\left[\begin{array}{ll}s_1 s_2 s_3\end{array}\right]\left\{\begin{array}{l}{\left[\begin{array}{c}D^{1-\lambda}\left[f_1(x)+\dot{x}_{1 r}-e_1\right] \\ D^{1-\lambda}\left[f_2(x)+\dot{x}_{2 r}-e_2\right] \\ D^{1-\lambda}\left[f_3(x)+\dot{x}_{3 r}-e_3\right]\end{array}\right]} \\ +D^{1-\lambda}\left(\left[\begin{array}{lll}g_{11}(x) & g_{12}(x) & g_{13}(x) \\ g_{21}(x) & g_{22}(x) & g_{23}(x) \\ g_{31}(x) & g_{32}(x) & g_{33}(x)\end{array}\right]\left[\begin{array}{l}u_1 \\ u_2 \\ u_3\end{array}\right]\right)\end{array}\right\}$ (14)
If matched disturbances, d1(t), d2(t) and d3(t) occur in the susceptible and infected individuals in the HBV epidemic system, and substituting Eq. (12) into Eq. (14) yield
$V=\left[\begin{array}{lll}s_1 & s_2 & s_3\end{array}\right]\left\{\begin{array}{l}{\left[\begin{array}{c}D^{1-\lambda}\left[f_1(x)+d_1(t)+\dot{x}_{1 r}-e_1\right] \\ D^{1-\lambda}\left[f_2(x)+d_2(t)+\dot{x}_{2 r}-e_2\right] \\ D^{1-\lambda}\left[f_3(x)+d_3(t)+\dot{x}_{3 r}-e_3\right]\end{array}\right]} \\ +D^{1-\lambda}\left(\left[\begin{array}{c}-\left[f_1(x)-\dot{x}_{1 r}+e_1\right]-D^{\lambda-1} \theta_1 \\ -\left[f_2(x)-\dot{x}_{2 r}+e_2\right]-D^{\lambda-1} \theta_2 \\ -\left[f_3(x)-\dot{x}_{3 r}+e_3\right]-D^{\lambda-1} \theta_3\end{array}\right]\right)\end{array}\right\}$
$\begin{aligned} & \dot{V}=\left[\begin{array}{lll}s_1 & s_2 & s_3\end{array}\right]\left[\begin{array}{c}D^{1-\lambda} d_1(t)-k_{s w 1} \operatorname{sign}\left(s_1\right)-k_{s p 1} s_1 \\ D^{1-\lambda} d_2(t)-k_{s w 2} \operatorname{sign}\left(s_2\right)-k_{s p 2} s_2 \\ D^{1-\lambda} d_3(t)-k_{s w 3} \operatorname{sign}\left(s_3\right)-k_{s p 3} s_3\end{array}\right] \\ & \dot{V}=-k_{s p 1} s_1{ }^2-k_{s p 2} s_2{ }^2-k_{s p 3} s_3{ }^2 \\ &+\left(D^{1-\lambda} d_1(t)-k_{s w 1} \operatorname{sign}\left(s_1\right)\right) \\ &+\left(D^{1-\lambda} d_2(t)-k_{s w 2} \operatorname{sign}\left(s_2\right)\right) \\ &+\left(D^{1-\lambda} d_3(t)-k_{s w 3} \operatorname{sign}\left(s_3\right)\right)\end{aligned}$ (15)
Then,
$\begin{aligned} \dot{V} \leq & -k_{p 1} s_1{ }^2-k_{p 2} s_2{ }^2-k_{p 3} s_3{ }^2+\left(M_{d 1} s_1-k_{s w 1} \operatorname{sign}\left(s_1\right) s_1\right) \\ & +\left(M_{d 2} s_2-k_{s w 2} \operatorname{sign}\left(s_2\right) s_2\right)+\left(M_{d 3} s_3-k_{s w 3} \operatorname{sign}\left(s_3\right) s_3\right)\end{aligned}$ (16)
Since |D1-λdi(t)|<Mdi, 0≤Mdi<∞ and the values of kswi is chosen such that kswi>Mdi for i=1,2,3, it can be obtained as follows:
$\dot{V}<-k_{p 1} s_1{ }^2-k_{p 2} s_2{ }^2-k_{p 3} s_3{ }^2+\left(M_{d 1}-k_{s w 1}\right)\left|s_1\right|$
$+\left(M_{d 2}-k_{s w 2}\right)\left|s_2\right|+\left(M_{d 3}-k_{s w 3}\right)\left|s_3\right|<0$ (17)
The simulation is used as a tool to assess the FOSMC method’s capabilities to prevent the spread of HBV. This section is divided into two parts: simulation example; and simulation results.
3.1 Simulation example
In this study, the mathematical model with system parameters and initial conditions used in a simulation example is in accordance with the study [6]. The numerical values of these parameters are presented as follows: α=0.8, β=0.025, γ1=0.05, γ2=0.5, μ0=0.0121, μ1=0.02 and b=0.0121. Initial conditions are assumed as x1(0)=100, x2(0)=20, x3(0)=20 and x4(0)=12. First, the controlled epidemic HBV system without disturbances under the FOSMC was simulated. The simulation results were compared with those under the integer order SMC. Second, in order to investigate the control policy’s robustness, it is assumed that there are bounded disturbances d2(t) and d3(t) which occur and affect the growth rates of acute and chronical infected individuals, while the disturbance which affected the susceptible individual is zero as d1(t)=0. The bounded disturbances are defined as
$d_i(t)=\left\{\begin{array}{c}0,0 \leq t<t_s \\ A_{d i} \sin (5 t)+d_{c i}, t_s \leq t<t_e \\ 0, t_e<t<\infty\end{array}\right.$ (18)
where, Ts=15 days, Te=20 days, Adi=0.25, dci=0.5 for i=2,3. Then, the FOSMC policy with λ=0.65 was applied to the HBV system affected by the disturbances. The rest of the controller parameters were selected as follows: kIi=0.001, kspi=0.001, and kswi=50.
MATLAB Simulink was implemented to simulate the control HBV system from the initial time of t=0 day to 30 days with 0.001 day of incremental time. The Oustaloup filter was utilized to implement the fractional order derivative as presented in the study [39, 65, 74-76].
3.2 Simulation results
The enhancement of the convergence property of our FOSMC policy was illustrated in the simulation results. The results of the control HBV system manipulated by the policy are based on FOSMC with fractional order of 0.65 compared with those corresponding to the integer order SMC (λ=1).
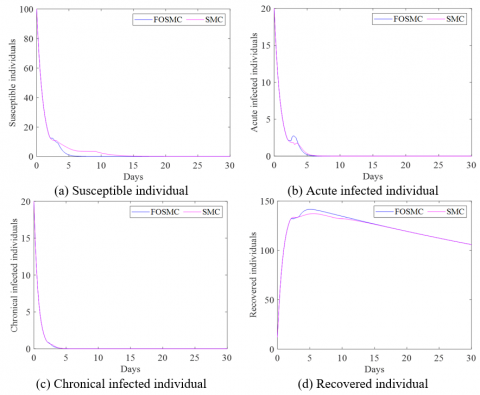
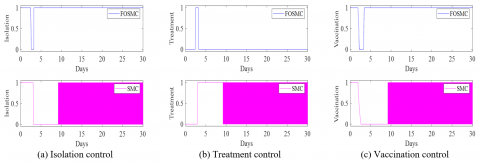
Without the effect of disturbances, the time responses of the susceptible individual, acute infected individual, chronical infected individual, and recovered individual of the control HBV epidemic system are presented in Figure 1. All target individuals corresponding to the FOSMC policy converge faster to the desired level than those corresponding to the integer order SMC scheme. The proposed FOSMC policy can minimize the susceptible, acute infected, and chronical infected subpopulations as the major goal of the control policy. In terms of convergence performance, the improvement of time response of the FOSMC approach over the SMC approach concurs with the studies carried out by the study [38-43]. The control input of our proposed FOSMC and SMC corresponding to the measures are presented in Figure 2. Based on this figure, the isolation and vaccination policies are the key strategies that require their maximum attempt to prevent HBV infection and its transmission for most of the duration. However, the treatment policy is necessary for a short period of time to limit the deleterious effects of antiviral medications.
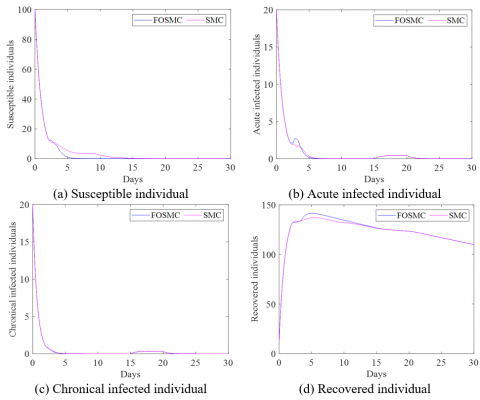
To investigate the robustness of the FOSMC policy, the response of the control system affected by the disturbances are presented in Figure 3. When disturbances occurred, both approaches (FOSMC and SMC) still influence all target individuals the corresponding desired levels. In addition, as demonstrated in Figure 3, all target individuals corresponding to the FOSMC policy are driven and converge faster to the desired level than those corresponding to the integer order-based SMC scheme. The control inputs under the effect of disturbance of the proposed FOSMC and SMC are shown in Figure 4. Thus, the control objective is satisfied as that defined in the previous study [6] where the control policy is synthesized based on a dynamic optimization approach in numerical form.
As mentioned above, chattering is the SMC method's primary weakness which it generates a high frequency in the input signal. The control inputs’ results are presented in Figure 2 (without disturbances) and Figure 4 (with disturbances). By comparing with and without disturbances, the control inputs perform similar dynamic efforts to control the target individuals. However, for SMC policy, the effect of disturbance brings about notable differences in control inputs during the bound disturbance period. The chattering of each control input provided by the FOSMC policy occurs less than each control input corresponding to the integer order one. The reduction of chattering occurrence from the FOSMC method agrees with the results in the literature [37]. In practice, chattering free control action is rational to apply to real-world patient management.
As a result, the simulation outcomes demonstrated that the proposed control policy with multiple measures provides desirable characteristics for the control HBV epidemic system: robustness, convergence rate improvement, and chattering reduction.
Figure 1. Plot of state variables versus time of FOSMC (λ=0.65) and SMC (λ=1) without disturbances
Figure 2. Plot of control inputs versus time of FOSMC (λ=0.65) and SMC (λ=1) without disturbances
Figure 3. Plot of state variables versus time of FOSMC (λ=0.65) and SMC (λ=1) under disturbances
Figure 4. Plot of control inputs versus time of FOSMC (λ=0.65) and SMC (λ=1) under disturbances
This paper proposes the FOSMC method to establish the control policy for the HBV epidemic system. The proposed control law representing the HBV epidemic control policy is presented in an analytical form to minimize susceptible, acute infected, and chronical infected subpopulations. Based on the results of this study, the main contributions of the study are summarized as follows.
-It is more logical and efficient to control HBV transmission with the FOSMC method using a control policy with multiple measures including isolation, vaccination, and treatment than with a control policy with a single control measure. Setting a multiple-measure control policy using the FOSMC approach is regarded as a multiple-input, multiple-output (MIMO) nonlinear feedback control problem. This is more challenging than the case of a single measure control which is considered a single input and single output (SISO) nonlinear feedback control problem.
-The impact of bounded disturbances is applied to investigate the robustness of the FOSMC control system. Under the proposed control policy, robustness and an improved rate of convergence are achieved.
-The chattering reduction in the measures of our proposed FOSMC policy is satisfactory, compared to the integer order-based SMC policy.
The present study has limitations due to some state variables corresponding to subpopulations in the model cannot be observed or being unavailable for a full state feedback controller. Setting the control policy based on an observer-based FOSMC controller can enhance the ability of the HBV control policy. This is a plausible future research direction.
[1] Nguyen, M.H., Wong, G., Gane, E., Kao, J. H., Dusheiko, G. (2020). Hepatitis B Virus: advances in prevention, diagnosis, and therapy. Clinical Microbiology Reviews, 33(2): 00046-19. https://doi.org/10.1128/cmr.00046-19
[2] Blum, H.E. (2021). Hepatitis B: diagnosis and management. AIMS Medical Science, 8(1): 1-10. https://doi.org/10.3934/medsci.2021001
[3] Kramvis, A., Chang, K.M., Dandri, M., Farci, P., Glebe, D., Hu, J., Janssen, H.L.A., Lau, D.T.Y., Penicaud, C., Pollicino, T., Testoni, B., Van Bömmel, F., Andrisani, O., Beumont-Mauviel, M., Block, T.M., Chan, H.L.Y., Cloherty, G.A., Delaney, W.E., Geretti, A.M., Revill, P.A. (2022). A roadmap for serum biomarkers for hepatitis B virus: Current status and future outlook. Nature Reviews Gastroenterology & Hepatology, 19: 727-745. https://doi.org/10.1038/s41575-022-00649-z
[4] Joshi, S.S., Coffin, C.S. (2020). Hepatitis B and pregnancy: virologic and immunologic characteristics. Hepatology Communications, 4(2): 157-171. https://doi.org/10.1002/hep4.1460
[5] Rybicka, M., Bielawski, K.P. (2020). Recent advances in understanding, diagnosing, and treating hepatitis b virus infection. Microorganisms, 8(9): 1416. https://doi.org/10.3390/microorganisms8091416
[6] Khan, T., Zaman, G., Chohan, M.I. (2016). The transmission dynamic and optimal control of acute and chronic hepatitis B. Journal of Biological Dynamics, 11(1): 172-189. https://doi.org/10.1080/17513758.2016.1256441
[7] Wang, G., Duan, Z. (2021,). Guidelines for prevention and treatment of chronic hepatitis B. Journal of Clinical and Translational Hepatology, 9(5): 769. https://doi.org/10.14218/jcth.2021.00209
[8] Memirie, S.T., Desalegn, H., Naizgi, M., Nigus, M., Taddesse, L., Tadesse, Y., Tessema, F., Zelalem, M., Girma, T. (2020). Introduction of birth dose of hepatitis B virus vaccine to the immunization program in Ethiopia: an economic evaluation. Cost Effectiveness and Resource Allocation, 18(1): 23. https://doi.org/10.1186/s12962-020-00219-7
[9] Guo, Y., Yang, Y., Bai, Q., Huang, Z., Wang, Z., Cai, D., Li, S., Man, X., Shi, X. (2020). Cost-utility analysis of newborn hepatitis B immunization in Beijing. Human Vaccines &Amp; Immunotherapeutics, 17(4): 1196-1204. https://doi.org/10.1080/21645515.2020.1807812
[10] Mastrodomenico, M., Muselli, M., Provvidenti, L., Scatigna, M., Bianchi, S., Fabiani, L. (2021). Long-term immune protection against HBV: associated factors and determinants. Human Vaccines & Immunotherapeutics, 17(7): 2268-2272. https://doi.org/10.1080/21645515.2020.1852869
[11] Kyuregyan, K.K., Kichatova, V.S., Isaeva, O.V., Potemkin, I.A., Malinnikova, E.Y., Lopatukhina, M.A., Karlsen, A.A., Asadi Mobarhan, F.A., Mullin, E.V., Slukinova, O.S., Ignateva, M.E., Sleptsova, S.S., Oglezneva, E.E., Shibrik, E.V., Isaguliants, M.G., Mikhailov, M.I. (2021). Coverage with timely administered vaccination against hepatitis B virus and its influence on the prevalence of HBV infection in the regions of different endemicity. Vaccines, 9(2): 82. https://doi.org/10.3390/vaccines9020082
[12] Vittal, A., Ghany, M.G. (2019). WHO guidelines for prevention, care and treatment of individuals infected with HBV. Clinics in Liver Disease, 23(3): 417-432. https://doi.org/10.1016/j.cld.2019.04.008
[13] KASL clinical practice guidelines for management of chronic hepatitis B. (2019). KASL clinical practice guidelines for management of chronic hepatitis B. Clinical and Molecular Hepatology, 25(2): PMC6589848. https://doi.org/10.3350/cmh.2019.1002
[14] Huang, B., Zhu, Y., Gao, Y., Zeng, G., Zhang, J., Liu, J., Liu, L. (2021). The analysis of isolation measures for epidemic control of COVID-19. Applied Intelligence, 51(5): 3074-3085. https://doi.org/10.1007/s10489-021-02239-z
[15] Medley, G.F., Lindop, N.A., Edmunds, W.J., Nokes, D.J. (2001). Hepatitis-B virus endemicity: heterogeneity, catastrophic dynamics and control. Nature Medicine, 7(5): 619-624. https://doi.org/10.1038/87953
[16] Mann, J., Roberts, M. (2011). Modelling the epidemiology of hepatitis B in New Zealand. Journal of Theoretical Biology, 269(1): 266-272. https://doi.org/10.1016/j.jtbi.2010.10.028
[17] O’Leary, C., Hong, Z., Zhang, F., Dawood, M., Smart, G., Kaita, K., Wu, J. (2009). A mathematical model to study the effect of hepatitis B virus vaccine and antivirus treatment among the Canadian Inuit population. European Journal of Clinical Microbiology &Amp; Infectious Diseases, 29(1): 63-72. https://doi.org/10.1007/s10096-009-0821-6
[18] Pang, J., Cui, J. A., Zhou, X. (2010). Dynamical behavior of a hepatitis B virus transmission model with vaccination. Journal of Theoretical Biology, 265(4): 572-578. https://doi.org/10.1016/j.jtbi.2010.05.038
[19] Zhang, S., Zhou, Y. (2012). The analysis and application of an HBV model. Applied Mathematical Modelling, 36(3): 1302-1312. https://doi.org/10.1016/j.apm.2011.07.087
[20] Khatun, M.S., Biswas, M.H.A. (2020). Optimal control strategies for preventing hepatitis B infection and reducing chronic liver cirrhosis incidence. Infectious Disease Modelling, 5: 91-110. https://doi.org/10.1016/j.idm.2019.12.006
[21] Khan, M.A., Shah, S.A.A., Ullah, S., Okosun, K.O., Farooq, M. (2020). Optimal control analysis of the effect of treatment, isolation and vaccination on Hepatitis B virus. Journal of Biological Systems, 28(2): 351-376. https://doi.org/10.1142/s0218339020400057
[22] Ullah, S., Khan, M.A., Gómez-Aguilar, J. (2019). Mathematical formulation of hepatitis B virus with optimal control analysis. Optimal Control Applications and Methods, 40(3): 529-544. https://doi.org/10.1002/oca.2493
[23] Yosyingyong, P., Viriyapong, R. (2021). Stability analysis and optimal control of a Hepatitis B virus transmission model in the presence of vaccination and treatment strategy. Naresuan University Journal: Science and Technology (NUJST), 30(2): 66-86. https://doi.org/10.14456/nujst.2022.17
[24] Jiao, H., Shen, Q. (2020). Dynamics analysis and vaccination-based sliding mode control of a more generalized SEIR epidemic model. IEEE Access, 8: 174507-174515. https://doi.org/10.1109/access.2020.3026089
[25] Puebla, H., Roy, P.K., Velasco-Perez, A., Gonzalez-Brambila, M.M. (2018). Biological pest control using a model-based robust feedback. IET Systems Biology, 12(6): 233-240. https://doi.org/10.1049/iet-syb.2018.5010
[26] Ibeas, A., de la Sen, M., Alonso-Quesada, S. (2013). Sliding mode robust control of SEIR epidemic models. 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran. https://doi.org/10.1109/iraniancee.2013.6599820
[27] Mehra, A. H. A., Zamani, I., Abbasi, Z., Ibeas, A. (2019). Observer-based adaptive PI sliding mode control of developed uncertain SEIAR influenza epidemic model considering dynamic population. Journal of Theoretical Biology, 482: 109984. https://doi.org/10.1016/j.jtbi.2019.08.015
[28] Boonyaprapasorn, A., Choopojcharoen, T., Pengwang, E., Maneewarn, T., Natsupakpong, S., Sa-Ngiamsunthorn, P., Suechoei, A., Wechsathol, W. (2019). Control of Ebola epidemic system based on terminal synergetic controller design. 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia. https://doi.org/10.1109/i2cacis.2019.8825074
[29] Rohith, G., Devika, K. B. (2020). Dynamics and control of COVID-19 pandemic with nonlinear incidence rates. Nonlinear Dynamics, 101(3): 2013-2026. https://doi.org/10.1007/s11071-020-05774-5
[30] Boonyaprapasorn, A., Choopojcharoen, T., Pengwang, E., Natsupakpong, S., Maneewarn, T., Sa-Ngiamsunthorn, P., Thung-od, K. (2020). The design of a synergetic controller for tuberculosis epidemic system. International Journal of Mechanical Engineering and Robotics Research, 9(10): 1439-1446. https://doi.org/10.18178/ijmerr.9.10.1439-1446
[31] Bilal, M., Ahmad, I., Babar, S. A., Shahzad, K. (2021). State feedback and synergetic controllers for tuberculosis in infected population. IET Systems Biology, 15(3): 83-92. https://doi.org/10.1049/syb2.12013
[32] Boonyaprapasorn, A., Kuntanapreeda, S., Ngaimsunthorn, P. S., Sethaput, T., Kumsaen, T. (2022). HBV epidemic control using time-varying sliding mode control method. 2022 27th International Conference on Artificial Life and Robotics, 27: 205-212. http://dx.doi.org/10.5954/ICAROB.2022.GS3-3
[33] Berger, T. (2022). Feedback control of the COVID-19 pandemic with guaranteed non-exceeding ICU capacity. Systems Control Letters, 160: 105111. https://doi.org/10.1016/j.sysconle.2021.105111
[34] Boonyaprapasorn, A., Choopojcharoen, T., Sa-Ngiamsunthorn, P., Thung-od, K. (2018). Synergetic controller for hepatitis B epidemic system. In 2018 3rd International Conference on Robotics, Control and Automation, Chengdu, China, pp. 31-36. https://doi.org/10.1145/3265639.3265655
[35] Assegaf, F., Saragih, R., Handayani, D. (2020). Adaptive Sliding Mode Control for Cholera Epidemic Model. IFAC-PapersOnLine, 53(2): 16092-16099. https://doi.org/10.1016/j.ifacol.2020.12.428
[36] Darwito, P.A., Wahyuadnyana, K.D. (2022). Performance examinations of quadrotor with sliding mode control-neural network on various trajectory and conditions. Mathematical Modelling of Engineering Problems, 9(3): 707-714. https://doi.org/10.18280/mmep.090317
[37] Mishra, C., Swain, S. K., Kumar Mishra, S., Yadav, S. K. (2019). Fractional order sliding mode controller for the twin rotor MIMO System. 2019 International Conference on Intelligent Computing and Control Systems (ICCS). https://doi.org/10.1109/iccs45141.2019.9065331
[38] Li, Z., Zhang, S., Wang, H. N., Ruan, M. (2019). fractional order sliding mode control for nano-positioning of piezoelectric actuator. In 2019 Chinese Control and Decision Conference (CCDC), Madurai, India. https://doi.org/10.1109/ccdc.2019.8833024
[39] Zheng, W., Chen, Y., Wang, X., Chen, Y., Lin, M. (2022). Enhanced fractional order sliding mode control for a class of fractional order uncertain systems with multiple mismatched disturbances. ISA Transactions. (In Press). https://doi.org/10.1016/j.isatra.2022.07.002
[40] Qin, M., Dian, S., Guo, B., Tao, X., Zhao, T. (2022). Fractional-order SMC controller for mobile robot trajectory tracking under actuator fault. Systems Science &Amp; Control Engineering, 10(1): 312-324. https://doi.org/10.1080/21642583.2021.2023683
[41] Sami, I., ur Rehman, U., Shehzadi, A., Ahmad, N., Ullah, S., Madanzadeh, S. (2020). Fractional order sliding mode control based model predictive current control of multi-phase induction motor drives. 2020 IEEE 23rd International Multitopic Conference (INMIC), Bahawalpur, Pakistan. https://doi.org/10.1109/inmic50486.2020.9318199
[42] Zaihidee, F.M., Mekhilef, S., Mubin, M. (2019). Application of fractional order sliding mode control for speed control of permanent magnet synchronous motor. IEEE Access, 7: 101765-101774. https://doi.org/10.1109/access.2019.2931324
[43] Ullah, N., Mohammad, A. S. (2021). Cascaded robust control of mechanical ventilator using fractional order sliding mode control. Mathematical Biosciences and Engineering, 19(2): 1332-1354. https://doi.org/10.3934/mbe.2022061
[44] EFE, M.N. (2010). Fractional order sliding mode control with reaching law approach. Turkish Journal of Electrical Engineering and Computer Sciences, 18(5): 731-748. https://doi.org/10.3906/elk-0906-3
[45] Yu, X., Yi, H., Mao, Z. (2022). Spacecraft attitude tracking control based on MPC and fractional-order sliding mode control. 2022 5th International Symposium on Autonomous Systems (ISAS), Hangzhou, China. https://doi.org/10.1109/isas55863.2022.9757286
[46] Ismail, Z., Varatharajoo, R., Chak, Y.C. (2020). A fractional-order sliding mode control for nominal and underactuated satellite attitude controls. Advances in Space Research, 66(2): 321-334. https://doi.org/10.1016/j.asr.2020.02.022
[47] Alipour, M., Malekzadeh, M., Ariaei, A. (2022). Active fractional-order sliding mode control of flexible spacecraft under actuators saturation. Journal of Sound and Vibration, 535: 117110. https://doi.org/10.1016/j.jsv.2022.117110
[48] Ma, Z., Zhu, Z. H., Sun, G. (2019). Fractional-order sliding mode control for deployment of tethered spacecraft system. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 233(13): 4721-4734. https://doi.org/10.1177/0954410019830030
[49] Zhou, X., Wang, W., Liu, Z., Liang, C., Lai, C. (2019). Impact angle constrained three-dimensional integrated guidance and control based on fractional integral terminal sliding mode control. IEEE Access, 7: 126857-126870. https://doi.org/10.1109/access.2019.2939418
[50] Liu, S., Yan, B., Zhang, X., Liu, W., Yan, J. (2022). Fractional-order sliding mode guidance law for intercepting hypersonic vehicles. Aerospace, 9(2): 53. https://doi.org/10.3390/aerospace9020053
[51] Zhu, C. (2021). Design of head pursuit guidance law based on fractional-order sliding mode theory. Journal of Aerospace Technology and Management, 13: e1201. https://doi.org/10.1590/jatm.v13.1201
[52] Yuvapriya, T., Lakshmi, P. (2019). Design of fractional order sliding mode controller for semi active suspension system. In 2019 IEEE International Systems Conference (SysCon), Orlando, FL, USA. https://doi.org/10.1109/syscon.2019.8836827
[53] Nguyen, S.D., Lam, B.D., Ngo, V.H. (2020). Fractional-order sliding-mode controller for semi-active vehicle MRD suspensions. Nonlinear Dynamics, 101(2): 795-821. https://doi.org/10.1007/s11071-020-05818-w
[54] Nguyen, T.T. (2020). Fractional-order sliding mode controller for the two-link robot arm. International Journal of Electrical and Computer Engineering (IJECE), 10(6): 5579-5585. https://doi.org/10.11591/ijece.v10i6.pp5579-5585
[55] Chen, D., Zhang, J., Huang, Y. (2021). A fractional-order sliding mode control method for the USV path tracking. 2021 China Automation Congress (CAC), Beijing, China. https://doi.org/10.1109/cac53003.2021.9727453
[56] Wu, H. M. (2021). Joint position tracking control of a two-link planar robot arm using fuzzy fractional order sliding-mode strategy. In 2021 21st International Conference on Control, Automation and Systems (ICCAS), JEJU, Korea. https://doi.org/10.23919/iccas52745.2021.9649983
[57] Labbadi, M., Nassiri, S., Bousselamti, L., Bahij, M., Cherkaoui, M. (2019). Fractional-order fast terminal sliding mode control of uncertain quadrotor UAV with time-varying disturbances. In 2019 8th International Conference on Systems and Control (ICSC), Marrakesh, Morocco. https://doi.org/10.1109/icsc47195.2019.8950657
[58] Huang, S., Wang, J. (2020). Fixed-time fractional-order sliding mode control for nonlinear power systems. Journal of Vibration and Control, 26(17-18): 1425-1434. https://doi.org/10.1177/1077546319898311
[59] Musarrat, M. N., Fekih, A. (2021). A fractional order sliding mode control-based topology to improve the transient stability of wind energy systems. International Journal of Electrical Power Energy Systems, 133: 107306. https://doi.org/10.1016/j.ijepes.2021.107306
[60] Tavazoei, M.S. (2022). Comments on “fractional-order sliding mode approach of buck converters with mismatched disturbances”. IEEE Transactions on Circuits and Systems I: Regular Papers, 69(3): 1381-1382. https://doi.org/10.1109/tcsi.2021.3130039
[61] Ullah, N. (2020). Fractional order sliding mode control design for a buck converter feeding resistive power loads. Mathematical Modelling of Engineering Problems, 7(4): 649-658. https://doi.org/10.18280/mmep.070418
[62] Boonyaprapasom, A., Natsupakpong, S., Ngiumsunthorn, P.S., Thung-od, K. (2017). Fractional order sliding mode control for vaccination in epidemic systems. In 2017 2nd International Conference on Control and Robotics Engineering (ICCRE), Bangkok, Thailand. https://doi.org/10.1109/iccre.2017.7935059
[63] NasimUllah, Ibeas, A., Shafi, M., Ishfaq, M., Ali, M. (2017). Vaccination controllers for SEIR epidemic models based on fractional order dynamics. Biomedical Signal Processing and Control, 38: 136-142. https://doi.org/10.1016/j.bspc.2017.05.013
[64] Monje, C.A., Chen, Y., Vinagre, B.M., Xue, D., Feliu-Batlle, V. (2010). Fractional-order systems and controls: fundamentals and applications. Springer Science & Business Media.
[65] Chen, Y., Petras, I., Xue, D. (2009). Fractional order control-A tutorial. In 2009 American Control Conference, St. Louis, MO, USA. https://doi.org/10.1109/acc.2009.5160719
[66] Caputo, M.C., Torres, D.F. (2015). Duality for the left and right fractional derivatives. Signal Processing, 107: 265-271. https://doi.org/10.1016/j.sigpro.2014.09.026
[67] Kilbas, A.A., Srivastava, H.M., Trujillo, J.J. (2006). Theory and applications of fractional differential equations (Volume 204). Elsevier Science.
[68] Wiora, J., Wiora, A. (2020). Influence of methods approximating fractional-order differentiation on the output signal illustrated by three variants of oustaloup filter. Symmetry, 12(11): 1898. https://doi.org/10.3390/sym12111898
[69] Xu, Z., Li, M. (2021). Rational implementation of fractional calculus operator based on quadratic programming. Mathematical Problems in Engineering, 2021: 6646718. https://doi.org/10.1155/2021/6646718
[70] Podlubny, I. (1998). Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Academic Press.
[71] Tepljakov, A., Petlenkov, E., Belikov, J. (2011). FOMCOM: A MATLAB toolbox for fractional-order system identification and control. International Journal of Microelectronics and computer science, 2(2): 51-62.
[72] Bouarroudj, N., Boukhetala, D., Boudjema, F. (2016). Sliding-mode controller based on fractional order calculus for a class of nonlinear systems. International Journal of Electrical and Computer Engineering (IJECE), 6(5): 2239-2250. https://doi.org/10.11591/ijece.v6i5.pp2239-2250
[73] Abdelhamid, D., Noureddine, B., Feliu-Batlle, V., Djamel, B., Bodjema, F. (2017). Fractional order sliding mode control with pole-placement for non-linear systems with uncertain disturbances. In 2017 6th International Conference on Systems and Control (ICSC), Batna, Algeria. https://doi.org/10.1109/icosc.2017.7958659
[74] Oustaloup, A., Levron, F., Mathieu, B., Nanot, F. (2000). Frequency-band complex noninteger differentiator: characterization and synthesis. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 47(1): 25-39. https://doi.org/10.1109/81.817385
[75] Xue, D., Chen, Y. (2021). Scientific computing with MATLAB® (2nd ed.). Routledge.
[76] https://www.mathworks.com/matlabcentral/fileexchange/60874-fotf-toolbox), MATLAB Central File Exchange.