Sebhi Abdelhadi*![]() | Ahmed Chaouki Megherbi
| Ahmed Chaouki Megherbi![]() | Abdelhakim Dendouga
| Abdelhakim Dendouga![]() | Athmane Zitouni
| Athmane Zitouni![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The identification of electrical and mechanical parameters is a crucial step in the modeling and control of industrial electric motors. Incorrectly identified parameters or those estimated with considerable error can lead to instability or biased control of the system. In this paper, we present a study to identify the electrical and mechanical parameters of an induction motor (IM) using two recent metaheuristic techniques: the Slim Mold Algorithm (SMA) and the Equilibrium Optimizer (EO). A hybrid algorithm, the Equilibrium Optimizer-Slim Mold Algorithm (EOSMA), combining the advantages of both techniques, is proposed and compared to other methods to demonstrate its effectiveness. The identification of the IM parameters is based on the optimization (minimization) of an objective function, which measures the error between the electrical quantities (stator current and motor speed) obtained from the simulation of a mathematical model and those measured during an experimental test. The results show that the electrical parameters identified by the hybrid EOSMA algorithm are more accurate than those obtained with the other two techniques in terms of convergence and precision, thus validating the effectiveness of the hybrid method.
parameters identification, IM, EOSMA, EO, SMA
The IM is the most powerful and least expensive electrical machine on the market. It is an essential element in factories. The percentage of IM use in factories compared to other motors has reached around 80%. This prompted researchers to design a control unit based on the frequency converter control model [1]. In the control unit, the parameters of the IM must be known in order to diagnose its malfunctions. For this reason, researchers estimate IM parameters using a variety of methods, aiming to achieve accurate results.
A standard testing technique that involves direct current, no-load, and blocked rotor tests was introduced [2]. However, this method has a high error rate in estimating IM parameters, is time-consuming, and requires specialized calibration devices [3]. To address these challenges, a technique based on the Gauss-Seidel method that utilizes nameplate data to estimate IM parameters without interrupting the motor's operation was proposed [4-6]. Nevertheless, this technique is prone to errors, as IM parameters can vary due to operational conditions, temperature, and magnetic flux. To improve parameter estimation accuracy, the Iterative Least Squares (RLS) technique was introduced [7]. RLS is known for its ease of implementation, speed, and efficiency. It operates by minimizing the difference between real and estimated values. The impact of different environmental conditions on IM parameters was also studied using the RLS technique [8]. In recent years, various metaheuristic techniques have been explored for estimating IM parameters. One technique combines numerical procedures and dimensionless analysis using Thevenin theory [9]. Another approach utilizes a particle swarm optimization algorithm and approximates rotor parameters as a function of speed [10]. An improved moth flame optimization algorithm was also developed [11]. A method that employs the Quantum Particle Swarm Optimization algorithm was proposed as well [12]. Additionally, linear induction motor parameter estimation based on the gray wolves optimization algorithm has been suggested [13]. Several methods based on the Kalman filter have been proposed to estimate IM parameters, although they are sensitive to the estimation of the initial state [14, 15]. Numerous researchers have applied different optimization algorithms using manufacturer’s data sheets to estimate IM parameters [16-20]. In the last three years, new algorithms have emerged and been applied in various studies [11, 21, 22], including the EO and SMA algorithms used in variable neighborhood search for job shop scheduling problems [23], and in solving inverse kinematics and engineering design problems [24]. Recent work has applied modern EO and SMA algorithms to estimate IM parameters [25, 26]. These algorithms demonstrated faster convergence and higher accuracy compared to the PSO algorithm, which they outperformed in various evaluation scenarios.
In this paper, we contribute to identifying the electrical and mechanical parameters of IM based on experimental data of current intensity and speed, using a hybrid metaheuristic algorithm that combines two algorithms: the EO and SMA. This combination, referred to as EOSMA, was introduced in 2022. The EOSMA algorithm has achieved great success and yielded better results in various research fields, but its application in estimating the parameters of IM has been limited. Therefore, in this work, we validated the EOSMA algorithm in estimating IM parameters by comparing it with the EO and SMA algorithms. The EOSMA algorithm produced more accurate results than both the EO and SMA algorithms, and it was characterized by rapid convergence and precise outcomes.
The following sections make up the organization of this work: Section 1 presents IM modeling. Section 2 provides a description of the new algorithms EOSMA, EO, and SMA. Section 3 provides a description of how to estimate IM parameters using algorithms EOSMA, EO, and SMA. Section 4 shows the results of estimating the IM parameters and comparing algorithm EOSMA with algorithms EO and SMA.
Modeling the IM is necessary to estimate its parameters. Therefore, a model closely matching the real IM was used, as validated in the frequency domain using the modified Park model SSFR [27]. Nonlinear mathematical equations were used for modeling an IM with reference to the rotor (d, q) axes.
$\left( \begin{align} & {{u}_{ds}}={{R}_{s}}{{I}_{ds}}+\frac{d{{\Phi }_{ds}}}{dt}-{{\omega }_{r}}{{\Phi }_{qs}} \\ & {{u}_{qs}}={{R}_{s}}{{I}_{qs}}+\frac{d{{\Phi }_{qs}}}{dt}+{{\omega }_{r}}{{\Phi }_{ds}} \\ & 0={{R}_{r}}{{I}_{dr}}+\frac{d{{\Phi }_{dr}}}{dt} \\ & 0={{R}_{r}}{{I}_{qr}}+\frac{d{{\Phi }_{qr}}}{dt} \\\end{align} \right)$ (1)
with
$\left( \begin{align} & {{\Phi }_{ds}}=\left( M+{{L}_{s}} \right){{I}_{ds}}+M{{I}_{dr}} \\ & {{\Phi }_{qs}}=\left( M+{{L}_{s}} \right){{I}_{qs}}+M{{I}_{qr}} \\ & {{\Phi }_{dr}}=\left( M+{{L}_{r}} \right){{I}_{dr}}+M\left( {{I}_{ds}}+{{I}_{dr}} \right) \\ & {{\Phi }_{qr}}=\left( M+{{L}_{r}} \right){{I}_{qr}}+M\left( {{I}_{qs}}+{{I}_{qr}} \right) \\\end{align} \right)$ (2)
Then the machine's nonlinear equations can be written as follows:
$\left( \begin{align} & {{u}_{ds}}={{R}_{s}}{{I}_{ds}}+\left( M+{{L}_{s}} \right)\frac{d{{I}_{ds}}}{dt}+M\frac{d{{I}_{dr}}}{dt}-{{\omega }_{r}}\left( M+{{L}_{s}} \right){{I}_{qs}}-{{\omega }_{r}}M{{I}_{qr}} \\ & {{u}_{qs}}={{R}_{s}}{{I}_{qs}}+\left( M+{{L}_{s}} \right)\frac{d{{I}_{qs}}}{dt}+M\frac{d{{I}_{qr}}}{dt}-{{\omega }_{r}}\left( M+{{L}_{s}} \right){{I}_{ds}}+{{\omega }_{r}}M{{I}_{qr}} \\ & 0={{R}_{r}}{{I}_{dr}}+\left( M+{{L}_{r}} \right)\frac{d{{I}_{dr}}}{dt}+M\frac{d{{I}_{ds}}}{dt} \\ & 0={{R}_{r}}{{I}_{qr}}+\left( M+{{L}_{r}} \right)\frac{d{{I}_{qr}}}{dt}+M\frac{d{{I}_{qs}}}{dt} \\\end{align} \right.$ (3)
where, $R_rR_s$ rotor resistance and stator resistance, $L_sL_r$ stator inductance and rotor inductance.
It can be done to complete the motor's differential equations with the movement equations expressed by (4) and (5).
$j\frac{d{{\omega }_{r}}}{dt}={{C}_{em}}-{{C}_{r}}-F{{\omega }_{r}}$ (4)
${{C}_{em}}=\frac{3}{2}M\left( {{I}_{qs}}{{I}_{dr}}-{{I}_{ds}}{{I}_{qr}} \right)$ (5)
where, $j$ represents the moment of inertia of the IM under study, $C_{em}$ its electromagnetic torque, $F$ its viscous friction, $C_r$ its load torque.
Figure 1 illustrates the mathematical model of a three-phase IM in the dq reference frame. The model was developed using the Simulink environment and is based on the dynamic equations of the motor transformed into the rotating reference frame. The three-phase voltages (Va, Vb, Vc) are converted into dq components using the Park transformation, which simplifies the analysis by reducing the system to two dimensions. The model includes both the electrical circuits of the motor and the mechanical equations that relate the generated torque to the rotor dynamics. A small simulation time step (0.0001 s) is used to ensure high accuracy in the transient response analysis.
Figure 1. Simulink block diagram of the IM [27]
2.1 SMA
SMA is a new algorithm based on metaheuristics proposed by Li et al. [28] Slime mold is a living organism that thrives in cold and humid environments. It spreads and reproduces in areas with abundant food. Slime mold moves toward food by detecting its scent, thereby spreading and enveloping itself around the food source. A mathematical model corresponding to this natural phenomenon was simulated using three different equations.
$\overrightarrow{{{x}_{\left( i+1 \right)}}}=\left\{ \begin{align} & rand.\left( ub-lb \right)+lb \\ & \overrightarrow{{{x}_{B\left( i+1 \right)}}}+\overrightarrow{va}.\left( \overrightarrow{w.}\overrightarrow{{{x}_{f\left( i \right)}}}-\overrightarrow{{{x}_{j\left( i \right)}}} \right) \\ & \overrightarrow{vb}.\overrightarrow{{{x}_{\left( i \right)}}} \\\end{align} \right.\begin{matrix} rand\prec z \\ r\prec q \\ r\ge q \\\end{matrix}$ (6)
where, $i$ is the number of iterations, $\overrightarrow{x_{(i+1)}}$ represents the position of the new mold particle, $\overrightarrow{x_{B}}$ is the location with the currently identified high concentration of food odors, $lb$ it symbolizes the lower limits, $ub$ it symbolizes the upper limits, $\overrightarrow{x_{f(i)}}$ and $\overrightarrow{x_{j(i)}}$ it is two randomly selected individual mold locations. $rand$ and $r$ is a variable number from 0 to 1, $\overrightarrow{va}$ is a variable number in the interval [-d,d], $\overrightarrow{vb}$ decreases linearly from 1 to 0, d is defined as follows:
$d=\arctan h\left( i-\frac{i}{\max \_i} \right)$ (7)
where, $max\_i$ is the number of maximal iterations. $\overrightarrow{w}$ is the transfer coefficient from the mold particle to the food location, and this factor changes from particle to particle depending on the value of the target function. $\overrightarrow{w}$ is defined on:
$\overrightarrow{{{w}_{\left( SIdx\left( n \right) \right)}}}=\left\{ \begin{align} & 1+r.\log \left( \frac{Bf-{{s}_{\left( n \right)}}}{Bf-wf}+1 \right) \\ & 1-r.\log \left( \frac{Bf-{{s}_{\left( n \right)}}}{Bf-wf}+1 \right) \\\end{align} \right.\begin{matrix} n\prec \frac{m}{2} \\ n\succ \frac{m}{2} \\\end{matrix}$ (8)
where, $n=1,2,...,m$
$m$ is the number of mold particles, $r$ is a random numerical variable between 0 and 1, $Bf$ represents the best value of the objective function for each iteration, $wf$ represents the worst value of the objective function, $s_{(n)}$ represents the value of the objective function for each mold particle, $SId_x$ represents the sequence of sorted objective function values.
$q=\tanh \left| {{s}_{\left( n \right)}}-FI \right|$ (9)
where, $FI$ represents the optimal value of the objective function calculated over all iterations. The transmission and spread of slime mold is based on three different equations:
When $rand \prec z$, one equation is used.
When $r \prec q$, another equation is used.
When $r \geq q$, a third equation is used.
It is set to z= [0.03 – 0.06] range in the SMA.
2.2 Equilibrium optimizer algorithm
The EO algorithm is inspired by modern physics and is based on the principle of balancing mass and volume, as proposed in recent research [29]. The concept is described by the following equation.
$\overrightarrow{{{c}_{1}}}=\overrightarrow{{{c}_{eq}}}+\overrightarrow{F}\left( \overrightarrow{{{c}_{0}}}-\overrightarrow{{{c}_{eq}}} \right)+\left( 1-\overrightarrow{F} \right)\frac{\overrightarrow{j}}{\left( \overrightarrow{\gamma .}v \right)}$ (10)
where, $\overrightarrow{c_1}$ represents the updated solution, $\overrightarrow{c_0}$ represents the preceding solution, $\overrightarrow{c_{eq}}$ indicates the best solution, $\overrightarrow{F}$ is a coefficient applied to weigh local and global search efforts. $\overrightarrow{j}$ represents the density development rate in the test volume, $\gamma$ is the variable of probability numbers in [0, 1]. v=1 indicates unity of volume. There are five candidate solutions in the balance basin. The four most intriguing solutions discovered thus far are listed below, with the second representing the central location (average concentration) of these four contender solutions, as illustrated:
$\overrightarrow{{{c}_{eq,pool}}}=\left\{ \overrightarrow{{{c}_{eq,1}}},\overrightarrow{{{c}_{eq,2}}},\overrightarrow{{{c}_{eq,3}}},\overrightarrow{{{c}_{eq,4}}},\overrightarrow{{{c}_{eq,ave,}}} \right\}$
$\overrightarrow{F}={{A}_{1}}.siqn\left( \overrightarrow{r}-0.5 \right).\left( {{e}^{\overrightarrow{\gamma }{{T}_{1}}}}-1 \right)$
${{T}_{1}}={{\left( i-\frac{i}{\max \_i} \right)}^{\left( {{A}_{2.}}.\frac{t}{\max \_i} \right)}}$ (11)
where, $A_1 \in$[1,2] and $A_2 \in$[1,2] represent the fixed global search force coefficient. The larger $A_1 \in$[1,2] the greater the exploration capacity and the lower the exploitation capacity, and vice versa. The $\overrightarrow{J}$ value is expressed as:
$\overrightarrow{J}=\left( \begin{align} & 0.5{{r}_{1}}\left( \overrightarrow{{{c}_{eq}}}-\overrightarrow{\gamma }\overrightarrow{c} \right)\overrightarrow{F} \\ &0\\\end{align}\right.\begin{matrix} {{r}_{2}}\ge jp \\ {{r}_{2}}\le jp \\\end{matrix}$ (12)
where, $r_1$ and $r_2$ are probability numbers in [0,1] and where $jp$=0.5 is the random probability of generation.
2.3 Proposed a new hybrid metaheuristic algorithm EOSMA, for IM parameters identification
The EOSMA algorithm is a recently proposed method representing a hybrid of the SMA and EO algorithms. This hybrid algorithm was developed to enhance the performance of metaheuristic solutions, aiming to achieve high convergence speed and solution accuracy. By integrating the strengths of SMA and EO, the algorithm provides a robust approach for finding optimal solutions. It employs strategies that accelerate the convergence process, enabling it to reach optimal solutions in a shorter time while maintaining high accuracy in solving complex problems. Additionally, EOSMA combines global search mechanisms (exploration) with focused search mechanisms (exploitation), ensuring comprehensive coverage of the search space and improving solution quality. The algorithm operates using mathematical equations derived from the unique features of SMA and EO, performing heuristic searches through iterative steps where solutions are gradually refined through the interaction of both algorithms’ components [23].
$\overrightarrow{{{x}_{\left( i+1 \right)}}}=\left\{ \begin{align} & \overrightarrow{{{x}_{eq\left( i \right)}}}+\left( \overrightarrow{{{x}_{\left( i \right)}}}-\overrightarrow{{{x}_{eq\left( i \right)}}} \right).\overrightarrow{F}+\left( 1-\overrightarrow{F} \right)\frac{\overrightarrow{j}}{\left( \overrightarrow{\gamma .}v \right)} \\ & \overrightarrow{{{x}_{eq,1\left( i \right)}}}+\overrightarrow{va}.\left( \overrightarrow{w.}\overrightarrow{{{x}_{f\left( i \right)}}}-\overrightarrow{{{x}_{j\left( i \right)}}} \right) \\ & \overrightarrow{{{x}_{\left( i \right)}}}+\overrightarrow{vb}.\overrightarrow{{{x}_{\left( i \right)}}} \\\end{align} \right.\begin{matrix} rand\prec z \\ r\prec q \\ r\ge q \\\end{matrix}$ (13)
where, $\overrightarrow{x_{(i)}}$ is the location of the equilibrium point, $\overrightarrow{x_{eq(i)}}$ is a solution chosen at random from the equilibrium pool with equal probability, $\overrightarrow{x_{eq,1(i)}}$ is the best solution in the equilibrium pool, the best position found so far, and z is an empirical value obtained through experiments, r is a random number vector in the range [0,1]. The H vector is defined by:
${{H}_{a,y}}=\left( \begin{align} & 1 \\ & 0 \\\end{align} \right.\begin{matrix} rand\prec k \\ rand\ge k \\\end{matrix}$
$\begin{align} & a=1,2,...,pop. \\ & y=1,2,...,\operatorname{var}. \\\end{align}$ (14)
where, $a$ is population size, y indicates the number of dimensions, k=0.2 is an settable variable, to ensure that the searches are not spoiled, the limits of the search operator are updated by Eq. (15) each time the location is updated:
$\overrightarrow{x_{a, y(i+1)}}=\left\{\begin{array}{lr}\frac{\left(x_{a, y(i)}+U B\right)}{2} & \overrightarrow{x_{a, y(i+1)}}\succ U B \\ \frac{\left(x_{a, y(i)}+U B\right)}{2} & \overrightarrow{x_{a, y(i+1)}}\prec U B \\ \frac{\text { others }}{x_{a, y(i+1)}} &others \end{array}\right.$ (15)
$UB$ symbolizes the upper limits.
Table 1 shows the organizational structure for the programming algorithm EOSMA, which is a hybrid metaheuristic algorithm that combines the two algorithms, EO and SMA.
Table 1. Organizational structure for the programming algorithm EOSMA
|
Algorithm of EOSMA |
|
Initialize the parameters $z,q,A_1,A_2,v,jp,pop,var, \max \_i$; Initiate search agent locations $\overrightarrow{x_{(a)}}(a=1,2, \ldots, pop )$; Initialize the objective function S of $\overrightarrow{x}$; Initiate the equilibrium pool $\overrightarrow{C_{eq,pool}}$; While $I \leq \max\_i$ verify the limit by Eq. (15); evaluated the objective function S; Preserve the best solutions compared to the previous iteration; Sort the objective function s; Updating Bf, wf; Evaluated the w by Eq. (8). Updated the equilibrium pool $\overrightarrow{C_{eq,pool}}$; determine the values of adaptative variables $i,a,vb,q$; Updating random values $r_1,r_2,r, va, vb, \overrightarrow{\gamma}$ For $a=1$ to $pop$; If $rand \prec z$ Updating $\overrightarrow{x_{(a)}}$ utilizing the EO operator; Else For $y=1$ to $var$ If $r(a,y) \prec q_{(a)}$; Updated $\overrightarrow{x_{(a,y)}}$ by the 2nd equation in Eq. (15); Else Update $\overrightarrow{x_{(a,y)}}$ by the 3rd equation in Eq. (15); end if end for end if end for verify the limit by Eq. (15); evaluated the objective function S; If $rand \prec k$ Updated $\overrightarrow{x}$ by the 1st equation in Eq. (13); Else Updated $\overrightarrow{x}$ by the 2nd equation in Eq. (13); And if $i=i+1$; end while return $\overrightarrow{x_B}$ and its objective function; |
3.1 The procedure of parameters identification of IM
The EOSMA algorithm operates in the context of the mathematical model of an IM by first initializing a set of random solutions, where each solution represents a random set of parameters for the model. These parameters are used to calculate the motor’s outputs, such as current intensity and speed, which are then compared to experimental data using an objective function designed to minimize the difference between the calculated and experimental values. Based on the performance of each solution relative to the objective function, the algorithm simulates the behavior of slime molds, where better-performing solutions move toward more promising regions of the search space, while poorly performing ones move away. This iterative process continues across generations until the algorithm converges on the optimal set of parameters, ensuring the model closely matches the experimental data.
The Figure 2 shows the process of identifying IM parameters. The procedure begins with the experimental testing of the IM, where stator currents and speed are measured. Next, a mathematical model of the IM is developed to simulate its behavior based on the given input parameters. The experimental and simulated data are then compared, and the difference between the two is calculated. To minimize this discrepancy, the EOSMA algorithm is applied for parameter identification, optimizing the IM parameters to improve accuracy. Finally, an objective function is used to evaluate the precision of the model by assessing the computed errors. This systematic approach ensures a reliable and accurate identification of the IM parameters.
Figure 2. Blocks in the MI parameters identification procedure
We now proceed to the task of determining the parameters of the IM represented by the set of differential equations defined in:
${{\dot{x}}_{est}}=F\left( {{P}_{est}},{{x}_{est}},u \right)$ (16)
where, $x_{est}$ is the variable vector of the mathematical model of the IM. F function represents a mathematical model of the IM. $P_{est}$ represents the identification of the parameters of the IM.
${{P}_{est}}={{\left[ {{R}_{s}},{{R}_{r}},M,{{l}_{s}},{{l}_{r}},j,f \right]}^{t}}$ (17)
${{x}_{est}}={{\left[ {{I}_{abcest}},{{\Omega }_{est}} \right]}^{t}}$ (18)
$u={{\left[ {{u}_{abcs}} \right]}^{t}}$ (19)
We can identify the optimal parameter vector $\widehat{{P}_{est}}$ based on the following equations:
${{S}_{\left( \widehat{{{P}_{est}}} \right)}}=\min {{S}_{\left( {{P}_{est}} \right)}}\text{ }{{P}_{est}}\in {{R}^{n}}$ (20)
$S_{\left(\widehat{P_{e s t}}\right)}=\sum\left|\frac{I_{{asest }}-I_{{as(\text{exp}) }}}{I_{{asest }}}\right|+\frac{1}{3}\left|\frac{\Omega_{{est }}-\Omega_{(\text {exp })}}{\Omega_{{est }}}\right|$ (21)
${S}_{\left( \widehat{{P}_{est}}\right)}$ represents the objective function.
3.2 The IM experiments tests
The characteristics of the IM used in the experiment are shown in Table 2.
Table 3 summarizes the main parameter settings used for the SMA, EO, and EOSMA algorithms. To ensure a fair comparison, the population size and number of iterations were kept consistent across all three algorithms, set to 200 and 300, respectively. Each algorithm also includes specific parameters relevant to its design: for SMA, the parameter z was set to 0.03 as recommended in the original study; EO uses a control parameter jp, set to 0.5 based on prior literature. For EOSMA, the hybrid algorithm, we introduced the parameter k, which was empirically tuned, and the optimal value was found to be k = 0.2 based on validation performance.
Table 2. Characteristics of the IM used in the experiment
|
Parameter |
Value |
|
P nominal power |
1 KW |
|
V nominal voltage |
380 V |
|
$I_N$ nominal current |
2.5 A |
|
$F_S$ the feed frequency |
50 HZ |
|
COS$\emptyset$ power factor |
0.83 |
|
$N_N$ the nominal speed |
2780 tr/min |
|
The coupling |
$\Delta$ |
Table 3. Parameters of the algorithms
|
Algorithms |
SMA |
EO |
EOSMA |
|
Number of population |
200 |
200 |
200 |
|
Number of iterations |
300 |
300 |
300 |
|
z |
0.03 |
/ |
/ |
|
jp |
/ |
0.5 |
/ |
|
k |
/ |
/ |
0.2 |
Table 4 shows the search limits of the algorithm. Search limits are set for each parameter to ensure accuracy in the search. These limits were chosen based on the induction motor data plate.
Table 4. The research space of optimized parameters by the EOSMA, EO, and SMA algorithms
|
|
$\boldsymbol{R}_{\boldsymbol{S}}(\Omega)$ |
$\boldsymbol{R}_{\boldsymbol{r}}(\Omega)$ |
$\boldsymbol{l}_{\boldsymbol{S}}(\Omega)$ |
$\boldsymbol{M(H)}$ |
$\boldsymbol{l}_{\boldsymbol{r}}\boldsymbol{(H)}$ |
J (kg. m2) |
F (Nm/s) |
|
lb |
10 |
5 |
0.001 |
0.5 |
0.001 |
0.0001 |
0.0001 |
|
ub |
30 |
20 |
0.5 |
4 |
0.5 |
0.1 |
0.1 |
Figure 3. Experimental tests of IM data extraction
Figure 3 illustrates the experimental setup used to extract current and speed data from a no-load IM. The IM was powered by a stable three-phase 380 V supply and operated under no-load conditions. The experiments were conducted in a laboratory environment at a constant ambient temperature of approximately 28°C. Voltage stability was maintained throughout the tests using a regulated power source. The current was measured using a cathode-ray oscilloscope connected in series with a 1-ohm resistor, while motor speed was measured using both a tachometer and the oscilloscope. The acquired current and speed signals were transferred to a computer in Excel format for further processing and analysis in MATLAB. The experimental data obtained from this setup was matched with the mathematical model to accurately estimate the parameters of the IM.
The table shows the results of the IM parameters obtained from the algorithms EOSMA, EO, and SMA. The results of the algorithm EOSMA are very accurate compared to the other algorithms, EO and SMA, because the objective function of EOSMA is better than EO and SMA, as shown in Table 5.
Table 5. Identified parameters of IM with EO SMA EOSMA algorithms
|
Algorithms Parameters |
SMA |
EO |
EOSMA |
|
$L_s$(H) |
0.059 |
0.077 |
0.056 |
|
$L_r (H)$ |
0.045 |
0.026 |
0.043 |
|
M (H) |
1.69 |
1.62 |
1.66 |
|
$R_S(\Omega)$ |
24.076 |
24.073 |
24.075 |
|
$R_r(\Omega)$ |
14.01 |
13.13 |
1 3.51 |
|
J(kg.m2) |
0.0008913 |
0.0008911 |
0.000795 |
|
f ($N.m.s$) |
0.00027082 |
0.00027084 |
0.00024 |
|
Objective function |
4.003 |
3.102 |
0.8 |
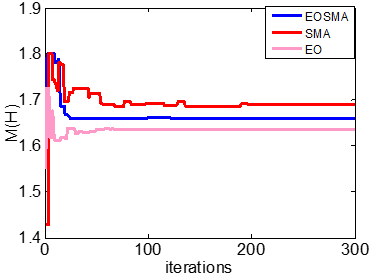
Figure 4 presents the progression of the objective function over successive iterations for the EOSMA, EO, and SMA algorithms. It is evident that EOSMA achieves convergence by approximately the 40th iteration, compared to the EO algorithm, which converges around the 60th iteration, and the SMA algorithm, which converges by the 80th iteration. These results clearly indicate that EOSMA not only converges more rapidly but also achieves superior objective function values. This comparison underscores the effectiveness of EOSMA in terms of both convergence speed and solution quality. The hybridization of SMA and EO successfully combines the strengths of both algorithms—balancing exploration and exploitation—to produce more accurate and efficient optimization outcomes. From a computational standpoint, while EOSMA may incur a slightly higher processing cost due to the integration of two algorithmic frameworks, its accelerated convergence often offsets this overhead. In practice, the algorithm requires fewer iterations to reach optimal or near-optimal solutions, which can lead to significant time savings overall. Therefore, despite its marginally higher computational demand, EOSMA proves to be a robust and efficient choice, particularly for applications that demand high precision and rapid convergence.
Figure 4. Objective function
Figure 5. Stator phase resistance
Figure 6. Stator inductance
Figure 7. Rotor inductance
Figure 8. Rotor phase resistance
Figure 9. Mutual inductance
Figure 10. J moment of inertia of the IM
Figure 11. Coefficient of friction f
Figures 5-11 show the changes in IM parameters as a function of iterations. EOSMA, EO, and SMA search for IM parameters in the research space indicated in Table 4. At the beginning of the iteration, the algorithms provide random parameters, and the error rate of the parameters is large. After 80 iterations, the parameters begin to converge to the correct results. After the research is completed. We conclude that algorithm EOSMA obtained better and more accurate results because the objective function EOSMA is minimized (objective function EOSMA: 0.8).
Figure 12. Experimental speed
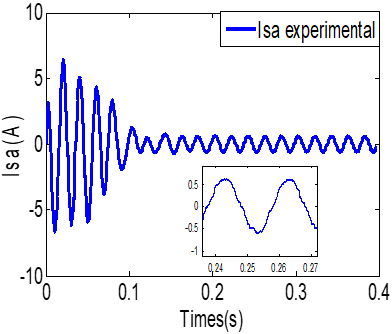
Figure 13. Experimental stator current
Figures 12 and 13 illustrate the evolution of angular velocity and current intensity over a short time interval. The upper curve shows a rapid increase in angular velocity, stabilizing around 300 rad/s, indicating efficient dynamic system performance. The lower curve displays damped oscillations in the current signal, reflecting transient behavior due to electromagnetic interactions. These results contribute to understanding the system’s dynamic response and evaluating its accuracy.
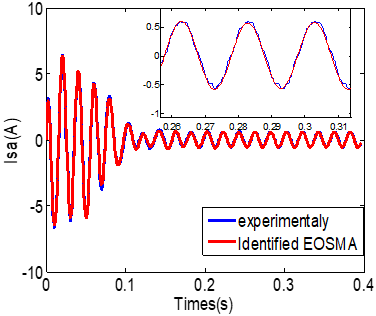
Figure 14. IM stator current obtained from simulation and experimental with identified parameters based on EOSMA
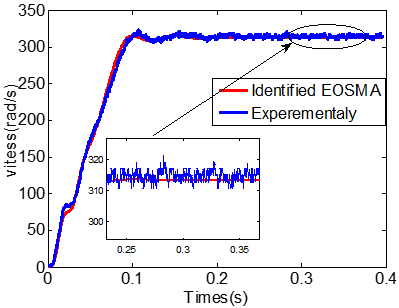
Figure 15. IM speed obtained from simulation and experimental with identified parameters based EOSMA
Figure 14 shows the difference (error) between the current intensity obtained from the mathematical model of the IM and the experimental model of the IM. Likewise, Figure 15 shows the difference (error) between the speed obtained from the mathematical model of the IM and the experimental model of the IM. These results obtained with precision prove by evidence the usefulness and validation of the EOSMA algorithm for the identification of the IM parameters.
In this research, the parameters of the IM were estimated based on experimental data regarding current intensity and the speed of the IM, using a recent algorithm known as EOSMA. The EOSMA algorithm is a hybrid approach that is distinguished by its accuracy and speed of convergence, as demonstrated in several recent studies. Therefore, we tested it for estimating IM parameters and compared its performance with the EO and SMA algorithms. The EOSMA algorithm outperforms the EO and SMA algorithms based on the objective function indicating the error between the current speed obtained from the mathematical model and those obtained from the experimental data.
[1] Salmasi, F.R., Najafabadi, T.A. (2011). An adaptive observer with online rotor and stator resistance estimation for induction motors with one phase current sensor. IEEE Transactions on Energy Conversion, 26(3): 959-966. https://doi.org/10.1109/TEC.2011.2159007
[2] Iyer, K.L.V., Lu, X., Mukherjee, K., Kar, N.C. (2012). A novel two-axis theory-based approach towards parameter determination of line-start permanent magnet synchronous machines. IEEE Transactions on Magnetics, 48(11): 4208-4211. https://doi.org/10.1109/IEEESTD.2004.95394
[3] Haque, M. H. (1993). Estimation of three-phase induction motor parameters. Electric Power Systems Research, 26(3): 187-193. https://doi.org/10.1016/0378-7796(93)90012-4
[4] Lee, K., Frank, S., Sen, P.K., Polese, L.G., Alahmad, M., Waters, C. (2012). Estimation of induction motor equivalent circuit parameters from nameplate data. In 2012 North American Power Symposium (NAPS), Champaign, IL, USA, pp. 1-6. https://doi.org/10.1109/NAPS.2012.6336384
[5] Guimaraes, J.M.C., Bernardes, J.V., Hermeto, A.E., da Costa Bortoni, E. (2014). Parameter determination of asynchronous machines from manufacturer data sheet. IEEE Transactions on Energy Conversion, 29(3): 689-697. https://doi.org/10.1109/TEC.2014.2317525
[6] Lindenmeyer, D., Dommel, H. W., Moshref, A., Kundur, P. (2001). An induction motor parameter estimation method. International Journal of Electrical Power & Energy Systems, 23(4): 251-262. https://doi.org/10.1016/S0142-0615(00)00060-0
[7] Feyzi, M.R., Sabahi, M. (2006). Online dynamic parameter estimation of transformer equivalent circuit. In 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, pp. 1-5. https://doi.org/10.1109/IPEMC.2006.4778186
[8] Zhu, H.Y., Cheng, W.S., Jia, Z.Z., Hou, W.G. (2010). Parameter estimation of induction motor based on chaotic ant swarm algorithm. In The 2nd International Conference on Information Science and Engineering, Hangzhou, China, pp. 1370-1373. https://doi.org/10.1109/ICISE.2010.5690640
[9] Rajput, S., Bender, E., Averbukh, M. (2020). Simplified algorithm for assessment equivalent circuit parameters of induction motors. IET Electric Power Applications, 14(3): 426-432. https://doi.org/10.1049/iet-epa.2019.0822
[10] Vukašinović, J., Štatkić, S., Milovanović, M., Arsić, N., Perović, B. (2023). Combined method for the cage induction motor parameters estimation using two-stage PSO algorithm. Electrical Engineering, 105(5): 2703-2714. https://doi.org/10.1007/s00202-023-01849-9
[11] Danin, Z., Sharma, A., Averbukh, M., Meher, A. (2022). Improved moth flame optimization approach for parameter estimation of induction motor. Energies, 15(23), 8834. https://doi.org/10.3390/en15238834
[12] Diarra, M.N., Yao, Y., Li, Z., Niasse, M., Li, Y., Zhao, H. (2022). In-situ efficiency estimation of induction motors based on quantum particle swarm optimization-trust region algorithm (QPSO-TRA). Energies, 15(13): 4905. https://doi.org/10.3390/en15134905
[13] Abdelwanis, M.I., El-Sousy, F.F., Ali, M.M. (2023). A fuzzy-based proportional–integral–derivative with space-vector control and direct thrust control for a linear induction motor. Electronics, 12(24): 4955. https://doi.org/10.3390/electronics12244955
[14] Li, H., Wang, Q., Xie, F., Hu, C., Guo, X. (2015). Parameters estimation of IM with the Extended Kalman filter and least-squares. In 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, pp. 1625-1628. https://doi.org/10.1109/ICIEA.2015.7334368
[15] Koubaa, Y. (2004). Recursive identification of induction motor parameters. Simulation Modelling Practice and Theory, 12(5): 363-381. https://doi.org/10.1016/j.simpat.2004.04.003
[16] Sag, T., Cunkas, M. (2007). Multiobjective genetic estimation to induction motor parameters. In 2007 International Aegean Conference on Electrical Machines and Power Electronics, Bodrum, Turkey, pp. 628-631. https://doi.org/10.1109/ACEMP.2007.4510580
[17] Huang, K.S., Kent, W., Wu, Q.H., Turner, D.R. (2001). Parameter identification for FOC induction motors using genetic algorithms with improved mathematical model. Electric Power Components and Systems, 29(3): 247-258. https://doi.org/10.1080/153250001300006653
[18] Banerjee, T., Bera, J., Sarkar, G. (2015). Parameter estimation of three phase induction motor using gravitational search algorithm for IFOC. In Michael Faraday IET International Summit 2015, Kolkata, pp. 607-610. https://doi.org/10.1049/cp.2015.1701
[19] Duan, F., Živanović, R., Al-Sarawi, S., Mba, D. (2016). Induction motor parameter estimation using sparse grid optimization algorithm. IEEE Transactions on Industrial Informatics, 12(4): 1453-1461. https://doi.org/10.1109/TII.2016.2573743
[20] Shu, Z., Duan, Z., Xiong, H. (2021). Application of adaptive population optimization artificial fish school algorithm to the identification of induction motor parameters. In 2021 6th International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, pp. 422-427. https://doi.org/10.1109/ICPRE52634.2021.9635341
[21] Vukašinović, J., Milovanović, M., Arsić, N., Radosavljević, J., Štatkić, S., Perović, B., Jovanović, A. (2022). Parameter estimation of induction motors using wild horse optimizer. https://www.etran.rs/2022/zbornik/ICETRAN-22_radovi/032-EEI2.1.pdf.
[22] Yin, S., Luo, Q., Zhou, G. et al. An equilibrium optimizer slime mould algorithm for inverse kinematics of the 7-DOFrobotic manipulator. Sci Rep 12, 9421 (2022).
[23] Wei, Y., Othman, Z., Daud, K. M., Yin, S., Luo, Q., Zhou, Y. (2022). Equilibrium optimizer and slime mould algorithm with variable neighborhood search for job shop scheduling problem. Mathematics, 10(21): 4063. https://doi.org/10.3390/math10214063
[24] Yin, S., Luo, Q., Zhou, Y. (2022). EOSMA: An equilibrium optimizer slime mould algorithm for engineering design problems. Arabian Journal for Science and Engineering, 47(8): 10115-10146. https://doi.org/10.1007/s13369-021-06513-7
[25] Abdelhadi, S., Megherbi, A.C., Zitouni, A. (2023). Parameters identification of induction motor based on the equilibrium optimizer. In 2023 International Conference on Electrical Engineering and Advanced Technology (ICEEAT), Batna, Algeria, pp. 1-7. https://doi.org/10.1109/ICEEAT60471.2023.10426200
[26] Abdelhadi, S., Megherbi, A.C., Zitouni, A. (2023). Parameters identification of induction motor using the slime mould algorithm. In 2023 2nd International Conference on Electronics, Energy and Measurement (IC2EM), Medea, Algeria, pp. 1-6. https://doi.org/10.1109/IC2EM59347.2023.10419421
[27] Abdelhakim, M., Kameleddine, H. (2016). Modeliranje i simulacija međuzavojskog kvara asinkronog motora upotrebom SSFR testa za dijagnostičke svrhe. Automatika: Časopis za Automatiku, Mjerenje, Elektroniku, Računarstvo i Komunikacije, 57(4): 948-959. https://doi.org/10.7305/automatika.2017.10.1805
[28] Li, S., Chen, H., Wang, M., Heidari, A. A., Mirjalili, S. (2020). Slime mould algorithm: A new method for stochastic optimization. Future Generation Computer Systems, 111: 300-323. https://doi.org/10.1016/j.future.2020.03.055
[29] Faramarzi, A., Heidarinejad, M., Stephens, B., Mirjalili, S. (2020). Equilibrium optimizer: A novel optimization algorithm. Knowledge-Based Systems, 191: 105190. https://doi.org/10.1016/j.knosys.2019.105190