Bui The Thanh | Ngo Kien Trun*
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The problem of controlling the angle of attack of the aircraft is one of the difficult and complex problems due to the problems of nonlinear kinematics, variable parameters and uncertainty model. The design of the angle of attack control according to the robustness control algorithm often leads to a higher order robustness controller. Using a higher-order controller has many disadvantages, so it is necessary to have solutions to reduce the order of the controller. This paper presents the idea of designing a low-order controller for the aircraft's angle of attack control system using the order reduction algorithm. In order to meet the requirements of performance and stability when parameters change, the optimal controller of the aircraft's angle of attack is usually of high order. The paper has used order reduction algorithms to reduce the order of high-order angle of attack controller, the results show that: 4th-order controller or 1st-order controller can be used instead of high order controller. Using a low-order controller to control the aircraft's angle of attack shows that the quality of the control system is comparable to that of a high-order controller.
order reduction algorithm, angle of attack, aircraft, optimal controller
The problems of nonlinear kinematics, variable parameters and uncertainty models are the main difficulties and complexities of the aircraft control problem [1]. The flight control principle uses classical mechanics to balance aerodynamic lift and mechanical torque. There are four main forces acting on an aircraft in flight, namely lift, drag, thrust, and weight. Lift and drag are the ‘‘aerodynamic forces’’ arising from the relative motion between the aircraft and the surrounding air. Thrust is provided by the propulsion system, and the force due to gravity is called ''weight. '' According to the principle of flight control, we need to balance the four main forces above so that the aircraft can move freely in space. To do that, it is necessary to control three basic components, namely the rudder, the elevator, and the aileron [1]. Based on these components, we can control the movement of the aircraft in terms of roll, pitch and yaw [1]. The high-altitude rudder can be raised or lowered to change the lift of the tail, creating torque around the wing axis (pitching moment). The two height rudders are always controlled to move in the same direction, with the same deflection angle. By varying the aircraft's pitch and angle of attack, the aircraft's elevator controls the direction of the aircraft [1]. The requirement of the aircraft's angle of attack control system is that the system needs to have good performance, strong stability when the parameters of the model change. There have been studies on aircraft frequency control [1-3], but this is still a problem that attracts many researchers. Most of the research works consider the robust controller to be the most suitable controller for the aircraft's angle of attack control system. However, the control design according to the robust control method often leads to high-order controllers [1-3]. In practice, the use of high-order controllers has many disadvantages. Therefore, robust control design is often accompanied by a requirement to reduce the controller order [4-9].
The authors [1] propose to use the balanced truncation method to find a low-order stable controller for the aircraft's angle of attack sustained control system. However, to find a low-order stable controller, there are many different order reduction algorithms [10-14]. The balanced truncation algorithm has been improved to apply to unstable systems [11], continuous systems [12] and discrete systems [13], or continuous to discrete conversion [14]. Some popular order reduction methods are the method of preserving the dominant point [7] or the optimal method of Hankel [15], etc. Therefore, to find a suitable low-order controller, we need to compare and evaluate the low-order controllers, which are the result of using different algorithms to reduce the high-order controller. In the content of this paper, we will introduce the high-order robust controller of the aircraft's angle of attack control system. We will apply order reduction algorithms to reduce the order of high-order robust controllers. By comparing and evaluating the low-order controllers, we will choose the most suitable low-order controller to replace the high-order controller.
The layout of the paper consists of the following parts: Part 1 is an introduction, part 2 is an introduction to model of control system and high-order robust controller. Part 3 is the result of reducing the controller order by different methods. Part 4 is the simulation results of the control system using low-order controls. Section 5 is the conclusion of the paper.
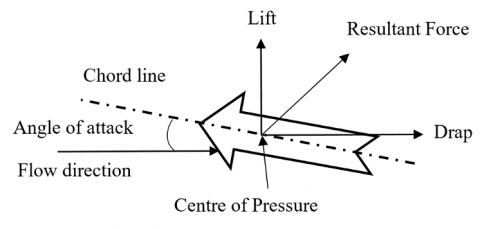
An aircraft's angle of attack is the angle between the direction of the gas (or liquid) flow velocity vector and the axial direction of the fuselage. For aircraft in flight, increasing velocity and angle of attack results in increased lift in the wings. At the same time, increasing the angle of attack also leads to an increase in induced drag. The aircraft's angle of attack (α) is controlled by the deflection on the control surface (Elevator) [1]. Figure 1 shows the aircraft's angle of attack as follows:
Figure 1. The angle of attack of the aircraft [1]
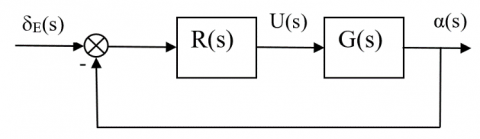
The block diagram of the aircraft's angle of attack control system is shown in Figure 2 as follows, where the input is the lift deflection (δE) at the pilot's command and the output is the desired angle of attack (α).
Figure 2. Block diagram of angle of attack control system [1]
In Figure 2, $\delta_{\mathrm{E}}(\mathrm{s})$- Deflection of elevator as commanded by the pilot; α(s)- The desired angle of attack of the aircraft; G(s)- Transfer function between $\delta_{\mathrm{E}}(\mathrm{s})$ and α; R(s)- Controller; U(s)- Output of controller.
The authors [1] have built the transfer function model of between $\delta_{\mathrm{E}}$ and α as follows:
$\mathbf{G}(s)=\frac{3.0604 s+182.5}{1.775 s^2+1.598 s+1}$
Design the angle of attack controller according to the robust optimization algorithm [1] to obtain the following controller.
$\mathbf{R}(s)=\frac{437.6 s^5+37170 s^4+1555000 s^3+44630000 s^2+225400000 s+242800000}{3.152 s^6+504.7 s^5+40850 s^4+1584000 s^3+44650000 s^2+225400000 s+242800000}$
Using a high-order controller (6th-order controller) will cause many disadvantages in practice, while using a low-order controller in practice brings many advantages such as easier analysis, much faster simulation, controller synthesis easier [1-9]. Therefore, it is necessary to simplify the high-order controller.
The 6th order controller is a stable model, so we can apply order reduction methods for the stable model to simplify this controller. The balanced truncation method is considered to be the most popular order reduction method [10]. This method has been improved and extended to be applicable to both stable and unstable systems- Zhou's balanced truncation algorithm [11], continuous system [12] and discrete system [13]. In addition, the remaining group of popular order reduction methods is the method that preserves the dominant poles [8, 9]. The group of methods that are also popular is the Hankel optimization algorithm [14, 15].
To simplify the high-order controller, we use different order reduction algorithms, namely the algorithm to preserve the dominant pole (modal truncaton) [8, 9], Zhou's balanced truncation algorithm [11], Optimal Hankel norm approximation (Hankelmr) [14, 15]. The results of order reduction are shown in the following Tables 1-3.
Table 1. The result of order reduction of the 6th-order controller according to the algorithm of preserving the dominant poles [8, 9]
|
Order |
Rr(s) |
|
4 |
$\frac{138.8 s^3+1.096 \cdot 10^4 s^2+4.272 \cdot 10^5 s+1.154 .10^7}{s^4+154.2 s^3+1.204 .10^4 s^2+4.298 .10^5 s+1.153 .10^7}$ |
|
3 |
$\frac{141.2 s^2+8671 s+1.106 .10^5}{s^3+140.7 s^2+8535 s+1.204 .10^5}$ |
|
2 |
$\frac{141.7 s+5842}{s^2+121.2 s+6171}$ |
|
1 |
$\frac{126.9}{s+78.11}$ |
Table 2. The result of order reduction of the 6th-order controller according to the optimal hankel norm approximation [14, 15]
|
Order |
Rr(s) |
|
4 |
$\frac{139 \cdot 1 s^3+1.074 \cdot 10^4 s^2+4 \cdot 16 \cdot 10^5 s+1 \cdot 1 \cdot 10^7}{s^4+152.8 s^3+1 \cdot 18 \cdot 10^4 s^2+4 \cdot 175 \cdot 10^5 s+1.099 \cdot 10^7}$ |
|
3 |
$\frac{148.6 s^2+8490 s+3.057 .10^5}{s^3+147.2 s^2+8907 s+2.959 .10^5}$ |
|
2 |
$\frac{114.5 s+6905}{s^2+105.1 s+7710}$ |
|
1 |
$\frac{304.9}{s+208}$ |
Table 3. The result of order reduction of the 6th-order controller according to the optimal hankel norm approximation [14, 15]
|
Order |
Rr(s) |
|
4 |
$\frac{138.8 s^3+1.092 .10^4 s^2+4.25 .10^5 s+1.148 .10^7}{s^4+153.8 s^3+1.199 .10^4 s^2+4.274 .10^5 s+1.147 .10^7}$ |
|
3 |
$\frac{138.5 s^2+7308 s+1.705 .10^5}{s^3+129.9 s^2+7897 s+1.647 .10^5}$ |
|
2 |
$\frac{138.1 s+5703}{s^2+114.9 s+6198}$ |
|
1 |
$\frac{144}{s+98.93}$ |
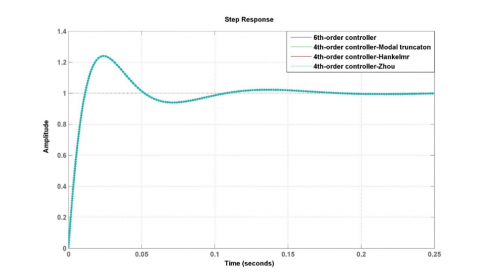
Figure 3. Step response of the 4th-order reduction and the 6th-order controller
Figure 4. Step response of the 3rd-order reduction and the 6th-order controller
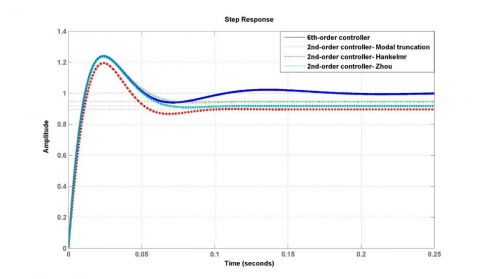
Figure 5. Step response of the 2nd-order reduction and the 6th-order controller
To compare and evaluate low-order controllers, we use step response and bode diagram. Figures 3-9 show the response comparison results of the original controller and the low-order controller.
From Figure 3, we see that the step response of the 4th-order controller and the 6th-order controller is completely coincident.
From Figure 4, we see that:
+ In the time interval t < 0.0143s, the step response of the 3rd-order controllers and the original controller is completely coincident.
From the time interval t > 0.0143s, the step response of the 3rd-order controller and the original controller starts to differ, in which the step response of the 3rd-order controller according to Zhou's balance truncation algorithm gives the smallest deviation, the step response of the 3rd-order controller according to the modal truncation algorithm gives the largest deviation.
The step response of the 3rd-order controller according to Zhou's balance truncation algorithm and the 3rd-order controller according to the optimal Hankel norm approximation is completely coincident.
From Figure 5, we see that the step response of the 2nd order controller and the original controller has many differences, of which the smallest difference is that of the 2nd-order controller according to the modal truncation algorithm, the biggest difference is that of the 2nd-order controller according to the optimal Hankel norm approximation.
From Figure 6, we see that
+ The difference between the step response of the first order controller according Zhou's balance truncation algorithm and the original controller is minimal.
+ The difference between the step response of the first order controller according to the method truncation algorithm and the original controller is the largest.
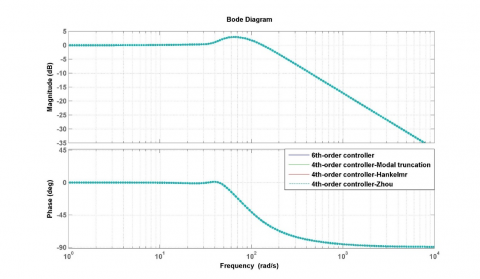
From Figure 7, we see that the bode diagram of the 4th-order controllers and the original controller is completely coincident.
Figure 6. Step response of the 1st-order reduction and the 6th-order controller
Figure 7. Bode diagram of the 4th-order reduction controllers and the 6th-order controller
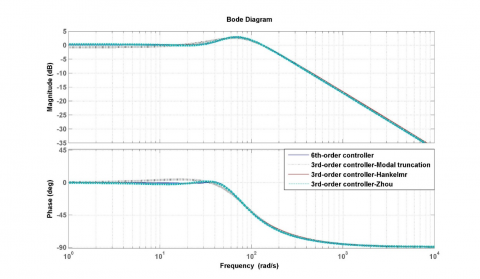
Figure 8. Bode diagram of the 3rd-order reduction controllers and the 6th-order controller
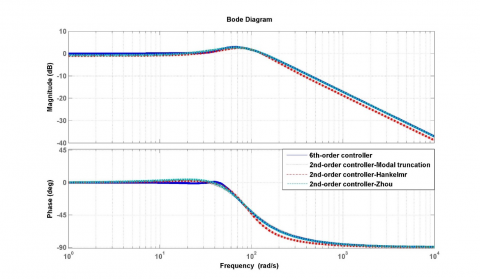
Figure 9. Bode diagram of the 2nd-order reduction controllers and the 6th-order controller
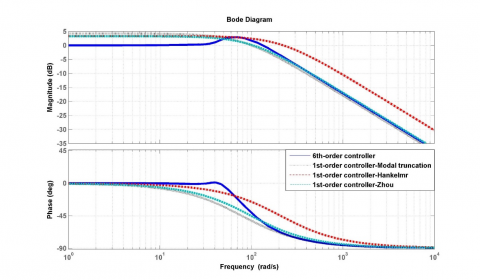
Figure 10. Bode response of the 1st-order reduction controllers and6th-order controller
From Figure 8, we see that the bode diagram of the 3rd-order controller according to Zhou's balance truncation algorithm and the optimal Hankel norm approximation coincides with the bode diagram of the original controller.
From Figure 9, we see that the bode diagram of the 2nd-order controllers has a small deviation from bode diagram of the original controller in which the smallest deviation belongs to the 2nd-order controller according to Zhou's method truncation algorithm and the modal truncation algorithm; the largest deviation belongs to the 2nd order controller according to the optimal Hankel norm approximation.
From Figure 10, we see that the bode diagram of the 1st-order controller has a small deviation from bode diagram of the original controller, in which the smallest deviation belongs to the 1st-order controller according to Zhou's method truncation algorithm and the modal truncation algorithm; the largest deviation belongs to the 1st-order controller according to the optimal Hankel norm approximation.
Comment: If we want to minimize the simplification error of the original controller, we choose a 4th order controller instead of the original controller. We will choose the first order controller according to the Zhou's balance truncation algorithm instead of the original controller if the requirement to simplify the original controller is to find the lowest order controller.
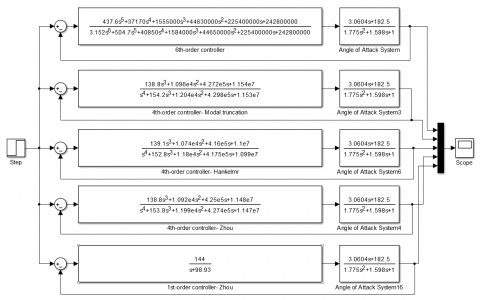
Using the 4th-order controllers in Tables 1, 2, 3 and 1st-order controllers according to Zhou's balance truncation algorithm in section 3 in the aircraft's angle of attack control system, the results are shown as follows (Figure 11, Figure 12):
Figure 11. Simulink diagram of the control system using the 6th-order controller and the low-order controller
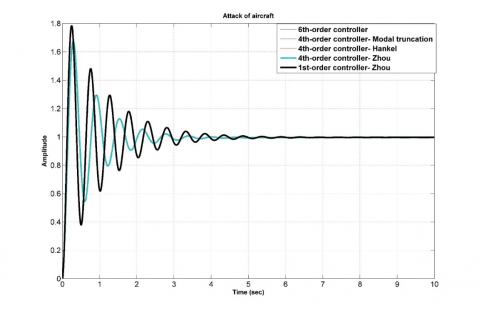
Figure 12. Aircraft's angle of attack response when using the 6th-order controls and the low-order controller
Comment: The response of the control system when using the 4th-order controller and when using the original controller is completely coincidental.
The response of the control system when using the first-order controller according to the Zhou's balance truncation algorithm and when using the original controller is different but still meets the system's stability requirements.
Thus, the 4th-order controller and 1st-order controller can replace the 6th-order controller while the quality of the generator angle of attack control system is still guaranteed. The control programming for the 4th-order controller and 1st-order controller is simpler than for the 6th-order controllers. Therefore, the aircraft's angle of attack system uses a controller 4th-order controller and 1st-order controller will have simpler program code, which will increase calculation speed, reduce processing time, and will better meet real-time control requirements.
Using the optimal robust algorithm to design the aircraft’s angle of attack controller not only helps to meet the performance requirements of controlling the angle of attack, but also ensures strong stability over a wide range of parameter value changes of the system. The paper used model order reduction algorithms to find a low-order controller, which can replace the 6th-order controller of the aircraft's angle of attack control system. The results of comparison and evaluation of order reduction controllers show that: it is possible to use a 4th-order controller or 1st-order controller to replace a 6th-order controller. The identification of a low-order controller that can replace a 6th-order controller is the main contribution of this paper. Using a 4th-order controller or 1st-order controller will help program code simpler, increase the calculation speed, the processing time is faster and ensure the real-time of the control system. Compared to the result in the study [1], the low-order controller (1st order controller) has a lower order than the low-order controller in ref. [1]. The results of the paper reinforce the applicability of model order reduction algorithms in the problem of determining low-order robust controllers, and at the same time show that Zhou's balanced truncation algorithm is the algorithm for the best order reduction efficiency among the balanced truncation algorithms. To clarify the efficiency of the low-order controller, in the next studies we will focus on the experimental results of the control system using the low-order controller. At the same time, this paper only deals with the controller that is a stable linear system, in the next articles, we will focus on the controller that is an unstable linear system.
The authors acknowledge the Hanoi Industrial Textile Garment University for supporting this works.
[1] Swain, S., Khuntia, P.S. (2014). Design of a reduced order robust convex controller for flight control system. International Journal of Electrical and Computer Engineering, 8(2): 424-429. https://doi.org/10.5281/zenodo.1092150
[2] McLean, D. (1990). Automatic Flight Control Systems. Englewood Cliffs, NJ, Prentice Hall, p. 606.
[3] Gracey, W. (1958). Summary of methods of measuring angle of attack on aircraft (No. NACA-TN-4351). https://digital.library.unt.edu/ark:/67531/metadc57244/.
[4] Hasenauer, J., Löhning, M., Khammash, M., Allgöwer, F. (2012). Dynamical optimization using reduced order models: A method to guarantee performance. Journal of Process Control, 22(8): 1490-1501. https://doi.org/10.1016/j.jprocont.2012.01.017
[5] Bhattacharyya, S.P., Keel, L.H. (1995). Robust control: The parametric approach. Advances in Control Education, 49-52. https://doi.org/10.1016/B978-0-08-042230-5.50016-5
[6] Vu, N.K., Nguyen, H.Q. (2020). Balancing control of two-wheel bicycle problems. Mathematical Problems in Engineering, Article ID: 6724382. https://doi.org/10.1155/2020/6724382
[7] Kien, V.N., Quang, N.H., Trung, N.K. (2021). Application of model reduction for robust control of self-balancing two-wheeled bicycle. TELKOMNIKA (Telecommunication Computing Electronics and Control), 19(1): 252-264. http://doi.org/10.12928/telkomnika.v19i1.16298
[8] Vu, N.K., Nguyen, H.Q. (2021). Model order reduction algorithm based on preserving dominant poles. International Journal of Control, Automation and Systems, 19(6): 2047-2058. https://doi.org/10.1007/s12555-019-0990-8
[9] Kien, V.N., Quang, N.H. (2011). Model reduction in Schur basic with pole retention and H2 norm error bound. Journal of Mechanical Engineering Research and Developments, 44(1): 279-293.
[10] Moore, B. (1981). Principal component analysis in linear systems: Controllability, observability, and model reduction. IEEE Transactions on Automatic Control, 26(1): 17-32. https://doi.org/10.1109/TAC.1981.1102568
[11] Zhou, K., Salomon, G., Wu, E. (1999). Balanced realization and model reduction for unstable systems. International Journal of Robust and Nonlinear Control: IFAC‐Affiliated Journal, 9(3): 183-198. https://doi.org/10.1002/(SICI)1099-1239(199903)9:3%3C183::AID-RNC399%3E3.0.CO;2-E
[12] Zilouchian, A. (1991). Balanced structures and model reduction of unstable systems. IEEE Proceedings of the SOUTHEASTCON'91, Williamsburg, VA, USA, pp. 1198-1201. https://doi.org/10.1109/SECON.1991.147956
[13] Boess, C., Nichols, N.K., Bunse-Gerstner, A. (2010). Model order reduction for discrete unstable control systems using a balanced truncation approach. Mathematics, Computer Science, Corpus ID: 40157331.
[14] Safonov, M.G., Chiang, R. (1989). A Schur method for balanced-truncation model reduction. IEEE Transactions on Automatic Control, 34(7): 729-733. https://doi.org/10.1109/9.29399
[15] Glover, K. (1984). All optimal Hankel-norm approximations of linear multivariable systems and their L, ∞ -error bounds†, International Journal of Control, 39(6): 1115-1193. https://doi.org/10.1080/00207178408933239