Helder Untiveros-Peñaloza![]() | Cristian Castro-Vargas*
| Cristian Castro-Vargas*![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This paper presents the design, implementation, and experimental evaluation of an Internet of Things (IoT)-based automatic pet feeding system aimed at improving automation, reliability, and remote management of food and water delivery in domestic environments. The system integrates an ESP32 microcontroller, a precision servomotor for solid food dispensing, a water pump for controlled delivery, and auxiliary sensors for operational monitoring. The software architecture incorporates WiFiManager for dynamic network configuration and Blynk 2.0 as a real-time remote monitoring and control platform. The main contribution of the proposed system lies in its automatic WiFi connectivity management, enabling autonomous reconnection to different local networks without manual reconfiguration, thereby enhancing portability and continuous availability. Experimental validation performed on a functional prototype reports an average food dispensing error of ± 2.5% and a volumetric water delivery error of ± 1.8%. Regarding connectivity, the system achieved a WiFi reconnection success rate of 98%, with an average reconnection delay between 1 and 2 s after network disruptions. The obtained results demonstrate stable, accurate, and reliable system performance, fulfilling key operational requirements of domestic IoT applications. The proposed architecture and reported performance metrics highlight the potential of the system as a practical and experimentally validated platform for intelligent pet feeding solutions.
automatic pet feeder, Internet of Things (IoT), ESP32, WiFiManager, Blynk 2.0, experimental evaluation
People face significant challenges in ensuring adequate nutrition for household pets during times of absence [1-5]. Advances in IoT technology and microcontrollers such as the ESP32 have enabled smarter and more precise solutions [6, 7]. However, while devices such as automatic food dispensers already exist, most lack customization and remote monitoring capabilities accessible to the average consumer. Furthermore, many recent IoT-based solutions present limitations related to specific network compatibility or high implementation costs, leaving many pet owners without adaptable, efficient, and accessible systems [8-10].
The problem addressed by the ESP32 servo-powered pet food dispenser lies in ensuring proper and timely feeding for pets, even in situations where owners cannot be physically present [11]. With busy work schedules and frequent or unexpected travel, pet owners face the challenge of ensuring their animals receive the right amount of food at the right time [12]. This can lead to stressful situations for owners and animals, with risks associated with overfeeding or underfeeding [13, 14]. Therefore, there is a pressing need for solutions that allow owners to monitor their pets' feeding remotely and accurately. The ESP32 servo-powered pet food dispenser addresses this need by offering an efficient and reliable way to deliver pet food [15], giving owners peace of mind and ensuring the well-being of their animals.
The proposed approach is to develop a pet food dispenser that uses an internet-connected ESP32 microcontroller and a servo motor to dispense food. The ESP32 enables remote connection via mobile devices or computers. It integrates the MQTT (Message Queue Telemetry Transport) protocol, facilitating efficient and reliable communication between the dispenser hardware and the IoT application [16]. This combination allows owners to monitor and control their pet's feeding anywhere in real-time, optimizing adaptability and user experience [17]. Furthermore, integrating the ESP32 with the Blynk 2.0 IoT platform and the WiFiManager network manager enables dynamic configuration across various networks, overcoming issues such as inconsistent connectivity and lack of customization [18, 19]. These features make the system technologically accessible, adaptable, and efficient compared to similar devices that rely on fixed networks or GSM modules, which are more costly and less versatile [20].
Additionally, this system provides a foundation for future improvements, such as integrating machine learning algorithms that can intelligently adapt to each pet's specific eating habits and food quality sensors that detect spoiled or expired products [21-23]. These advances promote pet health and well-being and provide owners additional peace of mind by ensuring that their animals receive fresh and safe food at all times [24]. Furthermore, food level sensors could issue alerts when the supply reaches critical levels, allowing for timely replenishment [25].
In summary, this work not only addresses the current need for accessible and reliable solutions but also lays the foundation for the development of more advanced and scalable systems in the pet care field. The research reinforces its relevance and contribution to animal welfare and home technology by highlighting existing gaps and proposed improvements.
In recent years, automatic pet feeding systems have attracted growing research interest due to the increasing demand for scheduled feeding and remote supervision during pet owners’ absence. However, a critical examination of existing studies reveals that most proposed solutions emphasize functional automation, while network robustness, adaptability, and long-term availability—key requirements for domestic IoT deployments—remain insufficiently addressed.
Early automatic feeding solutions are primarily based on programmable mechanical dispensers with predefined schedules and limited sensing capabilities [26, 27]. Although these systems successfully achieve basic feeding automation, the absence of connectivity and remote supervision significantly restricts their applicability in real household scenarios, particularly in urban environments characterized by irregular routines and extended absences.
With the introduction of Internet of Things technologies, several studies have incorporated wireless communication and mobile or web-based interfaces to enable remote monitoring and control. For example, ESP32-based systems integrating ultrasonic sensors and load cells allow tracking of food consumption through mobile applications [28]. Similar approaches employ Arduino or Raspberry Pi platforms combined with 3D-printed structures and smartphone applications for food and water dispensing [29]. Despite these advances, most reported systems rely on static WiFi configurations and do not explicitly consider connectivity loss, network portability, or autonomous reconnection, which limits their reliability in real domestic environments.
More recent smart pet feeders aim to enhance automation accuracy and system intelligence by integrating advanced sensing, communication protocols, and artificial intelligence techniques. Mahadiputraa et al. [30] report the use of ESP32 and MQTT communication to improve dispensing reliability, while Fazzari et al. [31] explore camera-based pet identification using deep learning techniques, as well as adaptive portion control mechanisms in smart feeding systems. Although these approaches improve functional intelligence, network adaptability and resilience under real household conditions remain largely unexplored, with limited discussion of fault tolerance and continuous availability.
Across the reviewed literature, several recurrent limitations are observed. Most systems require manual WiFi configuration and lack autonomous reconnection mechanisms, reducing portability when devices are deployed across different household networks [30]. Additionally, experimental validation is often restricted to basic functional demonstrations, with scarce reporting of quantitative performance metrics such as dispensing accuracy, volumetric water delivery error, or WiFi reconnection latency and success rate [26, 28].
In contrast, the present work explicitly addresses these identified limitations by proposing an IoT-based smart pet feeding system with dynamic WiFi configuration using WiFiManager and real-time remote monitoring via Blynk 2.0. Unlike prior studies, the proposed system emphasizes autonomous network switching, continuous connectivity monitoring, and structured quantitative experimental evaluation, providing performance metrics related to both dispensing accuracy and network robustness. This design enhances portability, reliability, and practical applicability in heterogeneous domestic IoT environments, positioning the system as an experimentally validated contribution beyond purely functional prototypes.
3.1 Methodological approach and development model
This study adopts an applied experimental research approach focused on the design, implementation, and quantitative evaluation of an IoT-based smart pet feeding system. The proposed solution was developed following a waterfall development model, structured into five sequential stages: requirements definition, system design, component selection, control algorithm implementation, and operational testing (Figure 1).
This staged methodology enabled the progressive integration and verification of each subsystem prior to full system integration. Unlike purely demonstrative or functional implementations, the methodology incorporates a structured experimental protocol with predefined metrics and repeatable tests, ensuring an objective assessment of accuracy, robustness, and connectivity reliability under controlled conditions.
Figure 1. Development block diagram
3.2 Application context
The data related to pet distribution in the districts of Lince and San Borja are considered exclusively as application context, aimed at justifying the social relevance of developing technological solutions for pet care in urban environments. Previous observational studies report a high concentration of dogs and cats in these districts, as well as relevant veterinary infrastructure, as illustrated in Figure 2. Additionally, national-level surveys indicate that approximately 49% of Peruvian households own at least one pet [32, 33].
Figure 2. Distribution of domestic animals in the selected urban districts (contextual reference)
It is important to emphasize that these demographic data do not influence either the technical system design or the experimental validation, which are based solely on quantitative performance metrics such as dispensing accuracy, volumetric control, operational stability, and WiFi reconnection capability.
Therefore, the performance evaluation of the developed system is independent of population variables and is conducted under controlled and reproducible laboratory conditions.
3.3 System design
Figure 3 illustrates the overall system architecture and signal flow. The ESP32 microcontroller acts as the central processing unit, receiving commands transmitted from a mobile application via WiFi. Upon command reception, the ESP32 activates the corresponding actuators, including the servomotor for solid food dispensing, the water pump for liquid delivery, and an acoustic buzzer for user feedback.
The system design was conceived to support controlled experimental evaluation, particularly with respect to dispensing precision, response stability, and wireless connectivity behavior under varying network conditions.
Figure 3. General system architecture and electronic design diagram
3.4 Component selection
3.4.1 ESP32 microcontroller
The ESP32 microcontroller offers integrated WiFi and Bluetooth connectivity at 2.4 GHz, making it suitable for IoT-based embedded systems [34, 35]. Its processing capability, memory resources, and native wireless support enable efficient real-time communication and control. Additionally, the wide availability and low cost of the ESP32 contribute significantly to reducing overall system cost, enhancing scalability and accessibility for end users.
3.4.2 Servomotor
The servomotor is an electromechanical actuator commonly used in applications requiring precise angular position control. Its internal gearing mechanism allows repeatable and controlled rotational motion, typically within a 180° range, making it suitable for accurate food dispensing tasks [36].
3.4.3 Buzzer
A piezoelectric buzzer converts electrical energy into sound through mechanical vibration of an internal ceramic disc. It is used in this system to provide audible feedback and operational alerts, enhancing user interaction and system status awareness [37].
3.4.4 Water pump
The water pump is controlled using the ESP32 and a relay module, operating similarly to a DC motor with unidirectional rotation. The pump operates at 5–12 V DC, with a maximum current of 350 mA and a flow rate of up to 800 L/h, allowing controlled water delivery based on predefined activation times [38].
3.4.5 Ultrasonic sensor (HC-SR04)
The HC-SR04 ultrasonic sensor measures distance by emitting ultrasonic waves and calculating the echo return time. Its non-contact measurement capability allows reliable detection of water levels, reducing mechanical wear and improving system durability [39].
3.5 Circuit design system design
Figure 4 and Figure 5 present the complete electronic circuit and operational configuration. The design integrates the ESP32, HC-SR04 ultrasonic sensor, servomotor, relay module, and water pump into a unified architecture.
This configuration ensures controlled food dispensing and water delivery, while the relay enables safe power switching for the pump, improving energy efficiency and operational safety.
Figure 4. Electronic circuit schematic
Figure 5. Operational workflow of the automated feeding system
3.6 Mathematical model for distance measurement
3.6.1 Time measurement
As illustrated in Figure 6, the ultrasonic sensor measures the time-of-flight of the emitted pulse in microseconds (µs). The elapsed time corresponds to the round-trip travel of the ultrasonic wave between the sensor and the reflecting surface.
Figure 6. Operating principle of the HC-SR04 ultrasonic sensor
3.6.2 Distance calculation
The speed of sound in air at 20℃ is approximately 343 m/s, equivalent to 0.0343 cm/µs. The total distance traveled by the ultrasonic wave is calculated as:
$Total \,\, Distance=Time × Speed \, \, of \,\, sound$ (1)
Since the signal travels to the target and back, the actual distance is obtained by dividing by two:
$Distance=(Time × Speed \,\, of \,\, sound) / 2$ (2)
Substituting numerical values:
$D=(t * 0.0343) / 2$ (3)
Which simplifies to:
$D=t * 0.01715$ (4)
This Eq. (4) is implemented in the microcontroller firmware for real-time liquid level estimation.
3.7 Experimental design and testing protocol
3.7.1 Food dispensing accuracy test
A total of 20 controlled dispensing cycles (n = 20) were conducted using commercial dry food. In each cycle, a predefined food quantity was programmed through the servomotor. The actual dispensed mass was measured using a digital scale and compared with the reference value.
The percentage dispensing error and inter-cycle variation were calculated, allowing evaluation of dosing precision and mechanical repeatability.
3.7.2 Water delivery evaluation
Water delivery precision was evaluated through repeated pump activations. For each activation, the delivered volume was measured and compared with the configured reference volume. The average volumetric error was computed to assess flow stability and repeatability.
Figure 7. Start of WiFi connection
3.7.3 WiFi connectivity tests
Wireless connectivity performance was evaluated under varying WiFi signal conditions representative of domestic environments. Intentional network interruptions were induced, and the following metrics were recorded (Figure 7):
Dynamic network configuration using WiFiManager enabled autonomous reconnection without user intervention.
3.7.4 Operational stability test
Long-term operational tests were conducted by running the system continuously over extended sessions. System behavior was monitored during repeated actuator activations and network disruptions, verifying the absence of system freezes and correct recovery after interruptions.
3.7.5 Evaluated variables and metrics
The experimental evaluation focused on the following metrics:
These metrics provide objective, quantitative, and reproducible evidence of system performance.
3.8 Firmware, algorithm and programming
Firmware was developed in the Arduino environment for ESP32. The control algorithm (Figure 8 flowchart) initializes peripherals, attempts WiFi connection via WiFiManager, and then enters the command handling loop. Upon receipt of a valid command (dispense food / dispense water), the appropriate actuator is triggered and the event logged. On network loss the firmware implements a reconnection strategy (attempts with progressive backoff) and updates local state indicators (LEDs/buzzer).
Figure 8. System flow diagram
3.9 IoT platform (Blynk)
Blynk 2.0 was selected as the IoT control and monitoring platform due to its rapid prototyping capabilities and support for virtual pins and widgets. The platform enables remote command transmission, real-time state visualization and basic data logging used during the experiments, as illustrated in Figure 9.
Figure 9. Blynk dashboard screenshot (widgets for servo, pump, water level gauge, logs)
3.10 Prototype model and mechanical layout
Figure 10 shows the CAD model of the prototype including food container, dispensing mechanism, water tank, electronic enclosure and sensor placements. The mechanical layout facilitates easy assembly and maintenance and supports reproducible experimental tests.
Figure 10. Prototype CAD views (isometric, top, side)
4.1 Experimental results of the implemented system
The developed system was evaluated using a quantitative experimental protocol aimed at measuring its real performance under controlled domestic operating conditions. Unlike a purely demonstrative validation, the results presented in this section are based on repeated measurements, objective metrics, and comparisons with predefined reference values.
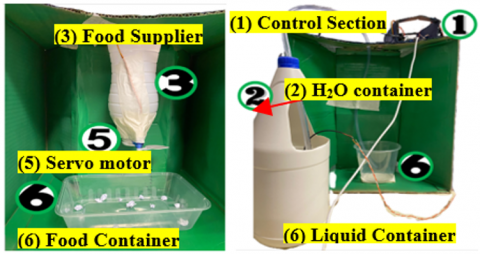
Figure 11. (a) Isometric view, (b) Isometric view
Figure 12. Control and automation stage
Figure 13. Pet container systems
Figure 11, Figure 12 and, Figure 13 present the physical implementation of the prototype and the different stages of mechanical, electronic, and functional integration. These figures provide a visual understanding of the system architecture; however, the performance evaluation is grounded in the quantitative results discussed in the following subsections.
4.2 Solid food dispensing accuracy
The accuracy of the food dispensing mechanism was evaluated through 20 consecutive dispensing cycles (n = 20) using standard dry pet food. In each cycle, the actual dispensed weight was measured and compared with the reference value configured in the system.
The results show a controlled dispersion in portion weight, with an average percentage error of 2.5%. This deviation is mainly attributed to minor mechanical variations of the servomotor and the geometry of the food outlet. This error margin is considered acceptable for domestic applications and falls within the ranges reported in similar rotational actuator-based feeding systems.
In 5% of the trials, deviations above the average were detected, associated with temporary food obstructions, a phenomenon widely reported in automatic dispensers lacking advanced flow-control mechanisms.
4.3 Evaluation of controlled water dispensing
The water dispensing system was assessed through repeated activation tests of the electronically controlled mini pump. For each activation, the real delivered volume was measured and compared with the programmed reference value.
The experimental analysis revealed an average volumetric error of 1.8%, with minimal variation between consecutive cycles. The slight deviations observed are attributed to transient pressure fluctuations and the inherent inertia of the pumping system.
These results demonstrate that time-based pump control provides stable and predictable water delivery, making it suitable for automatic pet hydration applications.
4.4 WiFi connectivity performance and automatic reconnection
Wireless connectivity robustness was evaluated under different environmental conditions with varying WiFi signal strength (RSSI). The evaluated metrics included reconnection time, successful reconnection rate, and communication stability with the Blynk platform after forced network interruptions.
The system achieved a successful reconnection rate of 98%, with average reconnection times ranging between 1 s and 2 s depending on environmental interference. These results confirm the effectiveness of the dynamic network configuration mechanism based on WiFiManager, which enables autonomous reconnection without user intervention.
Unlike many systems reported in the literature, where WiFi reconnection behavior is not explicitly analyzed, this study quantitatively demonstrates the system’s ability to maintain operational continuity under dynamic network conditions.
4.5 Consolidated quantitative results
Table 1 and Table 2 summarize the main quantitative performance metrics obtained during the experimental evaluation of the proposed system. These consolidated results provide a direct overview of the system accuracy and connectivity reliability under different operating conditions, supporting the detailed analyses presented in the previous subsections.
Table 1 reports the average error values obtained for solid food dispensing and water delivery. The food dispensing mechanism achieved an average error of 2.5%, while the water dispensing subsystem exhibited a lower average volumetric error of 1.8%. These values indicate stable and repeatable performance across multiple trials, confirming the effectiveness of the electromechanical design and control strategy adopted in the proposed system.
Table 2 presents the results of the WiFi connectivity and automatic reconnection tests conducted in different environments. The system maintained a successful reconnection rate above 95% in all evaluated scenarios, with average reconnection times between 1.0 s and 2.0 s. Even under interference-prone conditions, the observed reconnection delay remained within acceptable limits for domestic IoT applications, ensuring continuous system availability.
Table 1. Experimental results of system accuracy
|
Evaluated Parameter |
Reference Value |
Measured Average Value |
Average Error (%) |
|
Food dispensing |
Programmed portion |
Measured portion |
2.5% |
|
Water dispensing |
Programmed volume |
Measured volume |
1.8% |
Table 2. WiFi connection stability and reconnection performance
|
Test Environment |
Signal Strength |
Average Reconnection Time |
Success Rate |
|
Home |
High |
1.0 s |
100% |
|
Office |
Medium |
1.5 s |
98% |
|
Interference-prone environment |
Low |
2.0 s |
95% |
4.6 Comparative discussion with previous studies
The experimental results demonstrate that the proposed system consistently meets the functional and reliability requirements expected for an IoT-based automatic food and water dispenser for pets. While many previous works report only basic functional validation, this study incorporates systematic quantitative evaluation, enabling objective performance assessment under different operating conditions.
In this context, Table 3 compares the proposed system with two representative categories of related works identified in the literature review: (i) ESP32-based IoT feeders focused on functional automation and mobile monitoring [28], and (ii) more complex smart feeding systems integrating advanced communication protocols or intelligent sensing [30].
Table 3 presents a direct comparison between the proposed system and these representative studies. As observed, works such as the study by Rangel et al. [28] successfully implement functional IoT solutions with remote monitoring but do not report detailed quantitative metrics related to food dispensing accuracy, volumetric water delivery error, or WiFi reconnection behavior. This lack of performance metrics limits objective comparison and reproducibility under real domestic conditions.
Table 3. Experimental comparison of the proposed system against related studies
|
Feature / System |
Work [1] |
Work [2] |
Proposed System |
|
Hardware platform |
ESP32 |
ESP32 + additional sensors |
ESP32 |
|
Connectivity type |
WiFi / MQTT |
WiFi |
WiFi |
|
Dynamic network configuration |
Not reported |
Not reported |
Yes (WiFiManager) |
|
Automatic WiFi reconnection |
Not reported |
Not reported |
Yes |
|
Food dispensing accuracy |
Not quantified |
Qualitative |
± 2.5% |
|
Water dispensing error |
Not reported |
Not reported |
± 1.8% |
|
Repeated experimental trials |
No |
Partial |
Yes (n = 20) |
|
WiFi reconnection latency measurement |
No |
No |
Yes |
|
Long-term stability evaluation |
No |
No |
Yes |
|
Non-technical user focus |
Partial |
No |
Yes |
Unlike the system reported in the study by Rangel et al. [28], which primarily emphasizes feeding automation without addressing connectivity failure scenarios, the proposed system incorporates explicit mechanisms for dynamic network configuration and autonomous WiFi recovery using WiFiManager. The measured WiFi reconnection times remain within acceptable limits even under weak signal conditions, significantly improving continuous system availability in real household environments.
Compared to more complex proposals such as the study by Mahadiputraa et al. [30], which integrate MQTT communication or additional sensing and processing capabilities, the developed system achieves a balanced trade-off between simplicity, cost, and performance. Although intelligent features may enhance automation accuracy, such systems often increase architectural complexity without explicitly evaluating network portability, reconnection latency, or long-term availability.
The inclusion of repeated experimental trials (n = 20) in this study enables an objective evaluation of system consistency. The low variability observed in both food dispensing accuracy (± 2.5%) and water delivery error (± 1.8%) confirms the mechanical repeatability and reliability of the proposed design when compared to solutions that do not document such quantitative analysis.
Overall, the results and comparative discussion indicate that the proposed system not only fulfills its functional objectives but also introduces relevant improvements in operational robustness, network adaptability, and experimental validation. These contributions clearly address the limitations identified in previous IoT-based pet feeding systems [28, 30], positioning the proposed solution as a practical and experimentally validated alternative for real domestic deployments.
This study demonstrated the technical feasibility and experimental validity of an automatic pet feeding system based on the ESP32 microcontroller and IoT connectivity. The developed prototype achieved reliable performance in automated food and water dispensing, remote monitoring, and wireless control using a low-cost and accessible architecture suitable for domestic environments.
Quantitative experimental evaluation confirmed consistent system behavior across repeated trials, with low dispensing and volumetric errors and stable long-term operation. The implemented WiFi reconnection mechanism ensured high availability of the system, allowing autonomous recovery after network interruptions without user intervention. These results validate the robustness of the proposed solution beyond a purely functional demonstration.
Nevertheless, the experimental analysis also revealed specific limitations that guide future improvements. Minor variability in food portions was observed in a small percentage of trials due to temporary obstructions within the dispensing mechanism. Future work will therefore focus on incorporating automatic portion adjustment and obstruction detection, enabling corrective actions during operation and improving dispensing consistency.
Additionally, simple learning-based calibration techniques may be integrated to dynamically adapt servo motor parameters over time, reducing mechanical variability without significantly increasing system complexity or computational cost. Such adaptive calibration would directly build upon the experimental dispensing error analysis presented in this study.
From a connectivity standpoint, although the system achieved a high reconnection success rate, increased command latency was observed under high WiFi interference conditions. Future research will address this limitation through enhanced communication strategies, such as optimized reconnection policies or alternative lightweight communication protocols, to improve performance in dense network environments.
Finally, the main contribution of this work lies in the integration of a low-cost and robust IoT architecture with systematic quantitative experimental validation, overcoming purely demonstrative approaches commonly reported in previous studies. Unlike solutions focused solely on basic automation, the proposed system incorporates effective dynamic WiFi reconnection mechanisms and reports objective performance metrics related to dispensing accuracy, operational stability, and connectivity latency. These contributions position the proposed system as a reproducible and technically sound solution suitable for real domestic environments, contributing to the development of reliable IoT-based devices for automated pet care.
Thanks to the Universidad Privada del Norte for supporting the research Project.
[1] Oosthuizen, K., Haase, B., Ravulo, J., Lomax, S., Ma, G. (2023). The role of human–animal bonds for people experiencing crisis situations. Animals, 13(5): 941. https://doi.org/10.3390/ani13050941
[2] Muldoon, J.C., Williams, J.M. (2024). When having a pet becomes a luxury you can no longer afford. Anthrozoös, 37(5): 881-904. https://doi.org/10.1080/08927936.2024.2351276
[3] Nielson, S.A., Khosa, D.K., Verbrugghe, A., Clow, K.M. (2024). Talking treats: A qualitative study to understand the importance of treats in the pet-caregiver relationship. Preventive Veterinary Medicine, 226: 106163. https://doi.org/10.1016/J.PREVETMED.2024.106163
[4] Cyr, K., Hawkins, R.D. (2024). Pets and prams: Exploring perceptions of companion animals in relation to maternal wellbeing. Anthrozoös, 37(4): 745-763. https://doi.org/10.1080/08927936.2024.2339628
[5] Bennetts, S.K., Howell, T., Crawford, S., Burgemeister, F., Burke, K., Nicholson, J.M. (2023). Family bonds with pets and mental health during COVID-19 in Australia: A complex picture. International Journal of Environmental Research and Public Health, 20(7): 5245. https://doi.org/10.3390/IJERPH20075245
[6] Jocknoi, L., Kucharoen, P. (2024). ESP32Exten: Designing and developing an esp32 microcontroller expansion for IoT applications with motor propulsion and AI image processing. In 2024 8th International Conference on Information Technology (InCIT), Chonburi, Thailand, pp. 278-283. https://doi.org/10.1109/INCIT63192.2024.10810578
[7] Morchid, A., Et-taibi, B., Oughannou, Z., El Alami, R., et al. (2025). IoT-enabled smart agriculture for improving water management: A smart irrigation control using embedded systems and Server-Sent Events. Scientific African, 27: e02527. https://doi.org/10.1016/j.sciaf.2024.e02527
[8] Bhagat, R., Bamnote, A., Satpute, N., Khandait, P.D. (2024). Review on automatic pet feeding system. International Journal for Research in Applied Science & Engineering Technology (IJRASET), 12(3): 322-325, https://doi.org/10.22214/ijraset.2024.58684
[9] Prithviraj, V., Sriharipriya, K.C. (2022). Smart pet feeder system based on Google Assistant. In 2022 IEEE International Conference on Distributed Computing and Electrical Circuits and Electronics (ICDCECE), Ballari, India, pp. 1-6. https://doi.org/10.1109/ICDCECE53908.2022.9792789
[10] Boateng, M.A., Akparibo, A.R. (2022). A multifunctional automatic dog-feeder with Bluetooth and Wi-Fi connectivity. In 2022 IEEE 2nd International Conference on Mobile Networks and Wireless Communications (ICMNWC), Tumkur, Karnataka, India, pp. 1-6. https://doi.org/10.1109/ICMNWC56175.2022.10031807
[11] Woo, W.S., Ling, S.O.A., Fang, F.L.A. (2024). Automatic solar-based pet food dispenser system. In E3S Web of Conferences, Bandung, Indonesia, p. 07032. https://doi.org/10.1051/e3sconf/202447907032
[12] Haguisan III, I.A., Allen Jr, J., Yap, S., Ignacio, E.R.P., Gaorano, J.T. (2024). The making of an automatic dog feeding device with the use of Arduino uno and servo motor. International Journal of Applied Sciences and Engineering Review, 5(2): 108-118. https://doi.org/10.52267/IJASER.2024.5207
[13] Castillo-Arceo, O.E., Renteria-Flores, R.U., Santana-Mancilla, P.C. (2024). Design and development of a smart pet feeder with IoT and deep learning. Engineering Proceedings, 82(1): 63. https://doi.org/10.3390/ecsa-11-20487
[14] Georgopoulou, D.G., Vouidaskis, C., Papandroulakis, N. (2024). Swimming behavior as a potential metric to detect satiation levels of European seabass in marine cages. Frontiers in Marine Science, 11: 1350385. https://doi.org/10.3389/FMARS.2024.1350385
[15] Rathinavel, S. (2024). Automated food feeder for dogs using embedded device. International Journal of Research Publication and Reviews, 5(4): 1074-1077. https://doi.org/10.55248/gengpi.5.0424.0933
[16] Wu, W.C., Cheng, K.C., Lin, P.Y. (2018). A remote pet feeder control system via MQTT protocol. In 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, pp. 487-489. https://doi.org/10.1109/ICASI.2018.8394292
[17] Alvarez, S.A., Altamirano, R.H., Lascano, P.H., Dávalos, P.C. (2021). Monitoreo y control remoto de un dispensador de alimento para mascotas basado en IoT. Revista de Investigación en Tecnologías de la Información: Revista De Investigación En Tecnologías De La Información, 9(17): 77-88. https://doi.org/10.36825/RITI.09.17.008
[18] Kakani, D., Kulkarni, A., Pandya, Y., Mehendale, N. (2024). IoT-based smart home automation using ESP32 and Blynk with enhanced reliability. Available at SSRN 4802741. https://doi.org/10.2139/SSRN.4802741
[19] Tan, B., Tian, S., Wang, E., Xiao, L., Cao, K., Zheng, B., Luo, L. (2023). Research on the development and testing methods of physical education and agility training equipment in universities. Frontiers in Psychology, 14: 1155490. https://doi.org/10.3389/fpsyg.2023.1155490
[20] Essamlali, I., Nhaila, H., El Khaili, M. (2024). Advances in machine learning and IoT for water quality monitoring: A comprehensive review. Heliyon, 10(6): e27920. https://doi.org/10.1016/J.HELIYON.2024.E27920.
[21] Wang, D., Zhang, M., Jiang, Q., Mujumdar, A.S. (2024). Intelligent system/equipment for quality deterioration detection of fresh food: Recent advances and application. Foods, 13(11): 1662. https://doi.org/10.3390/foods13111662
[22] Gbashi, S., Njobeh, P.B. (2024). Enhancing food integrity through artificial intelligence and machine learning: A comprehensive review. Applied Sciences, 14(8): 3421. https://doi.org/10.3390/APP14083421
[23] Zatsu, V., Shine, A.E., Tharakan, J.M., Peter, D., et al. (2024). Revolutionizing the food industry: The transformative power of artificial intelligence-a review. Food Chemistry: X, 24: 101867. https://doi.org/10.1016/j.fochx.2024.101867
[24] Harper, S., Mehrnezhad, M., Leach, M. (2023). Security and privacy of pet technologies: Actual risks vs user perception. Frontiers in the Internet of Things, 2: 1281464. https://doi.org/10.3389/friot.2023.1281464
[25] Tutul, M.J.I., Alam, M., Wadud, M.A.H. (2023). Smart food monitoring system based on IoT and machine learning. In 2023 International Conference on Next-Generation Computing, IoT and Machine Learning (NCIM), Gazipur, Bangladesh, pp. 1-6. https://doi.org/10.1109/NCIM59001.2023.10212608
[26] Amans, F.B., Umar, U.A. (2025). Design and fabrication of an automatic pet food dispenser. Journal of Mechatronics and Artificial Intelligence, 2(1): 11-20.
[27] Zainuddin, A.A., Mahazir, M.N.B., Adanan, M.A.A., Tamrin, M.I.M., Zulkfli, M.A.H., Samsudin, M.H.A. (2024). Design and Implementation of a Mobile-Controlled IoT Smart Pet Feeder for Busy Pet Owners. Malaysian Journal of Science and Advanced Technology, 4(4): 498-505. https://doi.org/10.56532/mjsat.v4i4.383
[28] Rangel, A.V.C., Ponce, I.U., Soto, I. (2024). Automatic pet feed system applying IoT. Modelling, Measurement & Control. D: Manufacturing, Management, Human & Socio-Economic Problems, 45(1-4): 413-421. https://doi.org/10.18280/mmc_d.451-413
[29] Shiddieqy, R.H.A., Saputro, B.A., Dandha, F.O. (2021). Automated pet feeder called smart pakan using 3D printer with open source control system. IPTEK The Journal of Engineering, 6(2): 58-62.
[30] Mahadiputraa, P.G.K., Suarjayaa, I.M.A.D., Wibawaa, K.S. (2024). Automatic pet feeder rotational model using MQTT and mobile application. Jurnal Ilmiah Merpati, 12(2): 114-125. https://doi.org/10.24843/JIM.2024.v12.i02.p04
[31] Fazzari, E., Romano, D., Falchi, F., Stefanini, C. (2025). Animal behavior analysis methods using deep learning: A survey. Expert Systems With Applications, 289: 128330. https://doi.org/10.1016/j.eswa.2025.128330
[32] Gil, A., León, D., Falcón, N. (2022). Características demográficas de los animales de compañía identificados con dispositivos electrónicos en dos distritos de Lima-Perú. Revista de Investigaciones veterinarias del Perú, 33(6): e24100. https://doi.org/10.15381/rivep.v33i6.24100
[33] Castillo, G., Asmat, I., León, D. (2022). Indicadores demográficos de canes y felinos con dueño en el distrito de Lince, Lima-Perú, 2020. Salud y Tecnología Veterinaria, 10(1): 35-44. https://doi.org/10.20453/stv.v10i1.4238
[34] Garcıa, A., Dıaz, M., Martınez, F. (2025). From concept to application: Building and testing a low-cost light detection and ranging system for small mobile robots using time-of-flight sensors. International Journal of Electrical and Computer Engineering (IJECE), 15(1): 292-302. https://doi.org/10.11591/ijece.v15i1.pp292-302
[35] Talbi, K., El Ougli, A., Tidhaf, B., Zrouri, H. (2023). Low-cost real-time Internet of Things-based monitoring system for power grid transformers. International Journal of Electrical and Computer Engineering (IJECE), 13(3): 2579-2588. https://doi.org/10.11591/ijece.v13i3.pp2579-2588
[36] Autsou, S., Kudelina, K., Vaimann, T., Rassõlkin, A., Kallaste, A. (2024). Principles and methods of servomotor control: Comparative analysis and applications. Applied Sciences, 14(6): 2579. https://doi.org/10.3390/APP14062579
[37] Baumann, P. (2022). Piezoelectric Buzzer. In Selected Sensor Circuits: From Data Sheet to Simulation, pp. 183-220. https://doi.org/10.1007/978-3-658-38212-4_8
[38] Harjanto, I., Yudaningrum, F. (2024). Design of water pump station control in polder system using IoT and hybrid fuzzy neural network. IOP Conference Series: Earth and Environmental Science, 1321(1): 012014. https://doi.org/10.1088/1755-1315/1321/1/012014
[39] Mexias, S., Fotopoulos, V., Giannakopoulos, K. (2024). Comparison of hc-sr04 and tf-lc02 distance sensors for indoor mapping applications. In 2024 Panhellenic Conference on Electronics & Telecommunications (PACET), Thessaloniki, Greece, pp. 1-4. https://doi.org/10.1109/PACET60398.2024.10497028