Sangaraju Hrushikesava Raju*![]() | Uruturu Sesadri
| Uruturu Sesadri![]() | Sama Thulasi Krishna | Yesupadam Sreeraman
| Sama Thulasi Krishna | Yesupadam Sreeraman![]() | Venkatesan Balaji
| Venkatesan Balaji![]() | Gunikhan Sonowal
| Gunikhan Sonowal![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Almost all categories of people would travel in trains, loads of material were to be transported, and various industry-related loads were carried for their business-oriented purposes including government goods to distribute to the state-wise needy of the people. This scenario requires the safety of train travel. In recent scenarios the world and India, have been experiencing train accidents that have led to the loss of many innocent people, as well as loss to specific organizations, and governments. There may be many ways to avoid accidents, but an effective and accurate system is needed. The significant approaches used are Positive Train Control (PTC), Collision Avoidance Systems (CAS), Automated Train Operation (ATO), and Advanced Signaling Systems along with traditional approaches. These scenarios demand a novel approach with maximum accuracy by overcoming the difficulties such as identifying potential equipment failures, and enhanced communication systems for seamless coordination of trains and control centers. The key benefits are comparison against existing methods, proactive risk assessment, and predictive maintenance to enhance safety standards, optimize operations, and ensure sustainability. In this, IoT devices like sensors, with network support are key functionalities in avoiding of train accidents.
trains, IoT, network support, remote controlling, proactive assessment, accuracy, efficiency
Nowadays, there are scenarios that illustrate the danger of traveling in trains, such as accidents occurring due to a lack of technology, a lack of appropriate methods, and inappropriate monitoring. To detect early dangers, a novel approach is to be designed, and would ensure accuracy, and optimal compared to other existing models.
The integration of layered models one after other and the usage of those models would provide a strong safety railway system that eliminates train collisions. This system utilizes a layered safety approach, combining advanced technologies and human oversight to minimize train collision risks.
Key Components that are currently or previously used are demonstrated in Table 1 with purpose and advantages, the railway maintenance system is using are following principles till today:
PTC: Acts as the foundation, automatically enforcing speed limits, preventing unauthorized movements, and ensuring safe stopping distances.
CAS: Uses onboard sensors (radar, lidar, cameras) to detect obstacles on the tracks and initiate emergency braking if necessary.
GPS Monitoring: Continuously tracks train location in real-time.
Remote control centers: Monitor the entire network, intervene in case of emergencies or PTC malfunctions, and communicate with train crews.
The safety of railway maintenance system is enhanced further by considering of below modules for better decision making and up-skilling of operators’ jobs:
Virtual Reality (VR) training: Provides engineers with realistic simulations to develop better decision-making and response skills in emergencies.
Augmented Reality (AR) maintenance: Streamlines maintenance procedures, improves accuracy, and allows for remote expert assistance.
Artificial Intelligence (AI): Analyzes data from various sources to identify trends, predict potential issues, and improve overall system effectiveness (future integration).
The identified advantages achieved by this system are Automated Enforcement in which PTC ensures adherence to safety protocols, Real-time Obstacle Detection in which CAS provides an extra layer of protection by detecting unforeseen hazards, Human Intervention in which Remote control centers allow for human oversight and decision-making in critical situations, Improved Training and Maintenance in which VR and AR enhance training effectiveness and maintenance efficiency, and Data-driven Improvement in which AI can analyze data to continuously improve safety protocols (future implementation). The significance of above methods and their impact over PTC are described in Table 2. The combination of these approaches is ‘N’ in number but for ensuring more accurate results, three combinations of these approaches are framed (refer to Table 3).
Table 1. Theme and advantages of methods used over train collision avoidance
|
Name of the Method |
Purpose |
Advantage |
|
PTC |
It used combination of GPS, trackside transponders, and wireless communication to control the speed limits and even stops the trains if any risk of collision is possible. |
Reduces the risk of human error in train collisions. |
|
CAS |
It uses onboard sensors and communication strategy to detect hazards and alert the operator or even stop the train automatically. |
It provides additional security if PTC fails. |
|
ATO |
It supports functionalities like braking, opening, closing of the doors, and acceleration. |
Minimizes human error and increases efficiency. |
|
Advanced Signaling Systems |
It provides real time information on track conditions, speed limits, and hazards. It uses beyond technology than trackside signals like in-cab displays, and communication with onboard computers. |
More safety guaranteed by establishing communication between tracks and trains. |
|
Remote Controlling with network support |
It supports to control the train during emergency from the remote location. |
It improves faster response to the incidents. |
|
GPS Monitoring over tracks with specific range |
It supports better tracking, real time location of train data. |
It facilitates faster intervention during emergencies. |
|
Virtual Reality and Augmented Reality |
It supports to improve accuracy and efficiency of train operations and locomotive training procedures. It helps indirectly to enhance efficiency of operations involved. |
It improves efficiency and accuracy of training operations of the personnel. |
Table 2. Impact of significant approaches over PTC methodology
|
Method |
How It Improves PTC Accuracy |
|
Advanced Signaling Systems |
Provides real-time data for better PTC decision-making |
|
GPS Monitoring |
Enhances PTC's understanding of train location |
|
Collision Avoidance Systems |
Acts as a backup layer for unforeseen situations |
|
Remote Controlling |
Enables monitoring and intervention if necessary |
|
VR Training |
Improves engineer understanding of PTC and response procedures |
Table 3. Outcome of considered approaches
|
Set Title |
Combination of Approaches |
Research Gap |
Result |
|
Standard approach |
Positive Train Control, Advanced Signaling Systems, Collision Avoidance Systems |
Interoperability, quality of human machine interface |
A multi-layered defense against collisions is provided by this combination. The advantages of this are reduced risk of collisions, increased reliability, overall safety, and streamline the operations. Among these, PTC enforces speed limit, and avoids trains to collide. Next is ASS feeds right information to PTC for better decision making. Next is CAS applies automatic braking if such is missed by PTC. |
|
Hybrid approach |
Positive Train Control, Remote Controlling, GPS Monitoring |
Lack of cost-effectiveness due to complex of integration |
In this, PTC may be primary defense and RC, GPS Monitoring are additional layers of safety. With the help of RC, GPS Monitoring, safety is provided for decision making in train operations, and maintenance, operations became more effective. |
|
Hybrid multi-modal approach |
Positive Train Control, Collision Avoidance Systems, Remote Controlling |
Lack of effective communication and coordination |
The PTC and CAS would limit the speed, and CAS automatically stops if PTC fails. These two would take decisions in critical situations with human element. When these methods fail, remote controlling (RC) allows human to interfere when PTC and CAS fails or additional safety suppose be required. |
|
Enhanced hybrid optimal approach (proposed approach) |
Positive Train Control, Collision Avoidance Systems Remote Controlling, GPS Monitoring, Virtual and Augmented Reality, Artificial Intelligence |
Extensive research |
Among these, PTC and CAS won’t allow human element and automate the process where as RC, GPS monitoring, and AR, VR helps effective human operations in case of automation fails. The role of AI is to make better decisions on the track occupancy, weather conditions, speed limits, train performance, classification of harmless and harmful objects, and improve response times by suggesting action plans to the human operators. |
This section synthesizes research findings on the prevention of train accidents, highlighting various technological advancements and methodological approaches aimed at enhancing railway safety.
Rossetto et al. [1] explored the long-term impacts of amnestic Mild Cognitive Impairment (aMCI) and Theory of Mind (ToM) on healthy control groups, suggesting that significant improvements in outcomes are contingent upon extended treatment durations.
Lee et al. [2] delved into the cognitive deficiencies associated with mental disorders, emphasizing the necessity of aligning patients' functional roles with their daily activities to streamline occupational roles effectively.
Restrepo-Escobar and Rincón-Barreto [3] focused on neurological deficits caused by various addictions, advocating for rehabilitation practices that enhance brain functionality and reduce dependencies.
Hong et al. [4] highlighted the challenges faced by existing railway practices, such as inadequate databases and the premature application of NLP techniques without sufficient training. They proposed that these issues could be mitigated through community-driven online platforms.
Ahamed et al. [5] analyzed fatal and non-fatal injuries resulting from train collisions, noting that severe trauma to critical body parts often leads to fatalities during treatment.
SureshKumar et al. [6] demonstrated the effectiveness of ULTRASONIC Sensors in detecting track obstacles, enhancing emergency communication systems between trains to prevent collisions.
The study [7] provides an analysis of various scenarios involving railway accidents, which have been reduced to single digits. Despite these improvements, the study identifies further opportunities to minimize accidents. It also explores technologies used in foreign countries and discusses a range of factors contributing to train accidents.
Bhavsar and Kulkarni [8] showed how RFID and video surveillance technologies could update train positions reliably to control centers, especially in areas with poor internet connectivity.
Lee et al. [9] discussed the responsibilities of train drivers under various operational modes, outlining the potential benefits and drawbacks associated with each.
Ranawaka et al. [10] introduced an Android application that uses GPS and OBD-II technology to inform nearby drivers about accident scenarios and excessive speeds, helping to prevent collisions.
Gundala et al. [11] implemented a combination of Ultrasonic, Flex, and Eye blink sensors to detect nearby vehicles, tire deflation, and driver drowsiness, respectively, significantly reducing accident risks.
Woo et al. [12] applied a leader-follower approach to UAV collision avoidance, utilizing a geometric-based method that ensures safety through effective distance maintenance.
Munoz-Castaner et al. [13] developed a method to locate individuals using their mobile numbers in areas with weak signals, enhancing the effectiveness of rescue operations.
Amin et al. [14] utilized GPS technology to alert nearby service centers during emergencies, facilitating rapid response to prevent fatalities.
Vidumina [15] showcased trains equipped with sensors that project real-time data on nearby animals and objects onto a driver's display, improving situational awareness and enhancing safety.
Anil et al. [16] introduced a collision avoidance system that incorporates multiple safety measures to prevent train collisions effectively.
Su et al. [17] described methods like relative braking systems and deep Q networks that manage train operations during abnormalities and maintain safe distances between trains.
Pupavac et al. [18] analyzed railway accidents in a specific zone in Croatia, noting a reduction in accidents but an increase in extraordinary events over the years.
El Koursi and Bruyelle [19] and Datta et al. [20] discussed the integration of GPS technology in trains to detect nearby obstacles like elephants, enhancing driver response times.
Aher and Tiwari [21] and Procházka et al. [22] analyzed economic losses from accidents, attributing the majority to level crossings and human errors, and highlighted the need for automatic tracking and alert systems to minimize such incidents.
Chopde et al [23] and Dey and Sangaraju [24, 25] explored technological solutions like RFID for gate management and novel procedures for cloud-based data management to enhance railway safety and performance.
This comprehensive review highlights the necessity of an integrated approach that includes rigorous training for railway staff, the deployment of AI models for decision support, enhanced sensor-based communication systems, and reliable GPS technology to effectively mitigate risks associated with train operations.
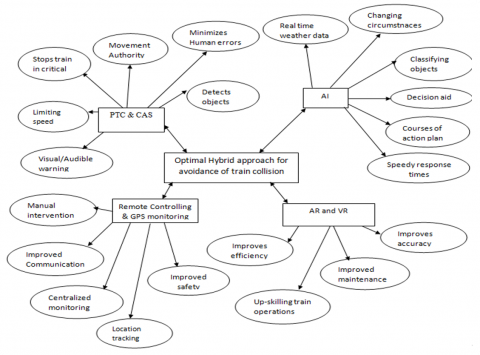
Figure 1. ER diagram of optimal hybrid system for avoiding train collision
Although the integration of few approaches along with AI, remote controlling and access, GPS usage would benefit the minimization of trains collision as well as upgrades the system into secure and reliable environment. In this context, ER model is depicted in Figure 1 where modules are described by their actions, and attributes.
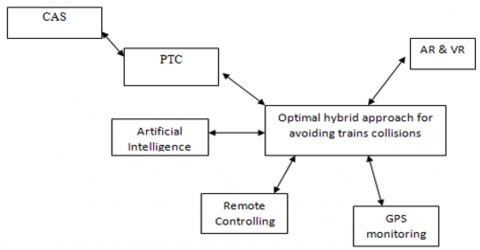
Figure 2 denotes the modules interaction in the proposed system as hierarchical view representation. Figure 3 represent CNN model processing, and output a vector with value for each track. Among them, lowest probability to be assigned represent less traffic and having less occupancy of the track. It is safe for switching the current train. Figure 4 denotes set of specific conditions to perform actions to avoid the train collision based on distance range, track occupancy, and parameter default cut offs. Figure 5 denotes flow of activities like order of activities to execute to achieve the objective of this study.
Figure 2. Modules of the optimal hybrid approach system for avoiding train collision
Figure 3. CNN model for classification
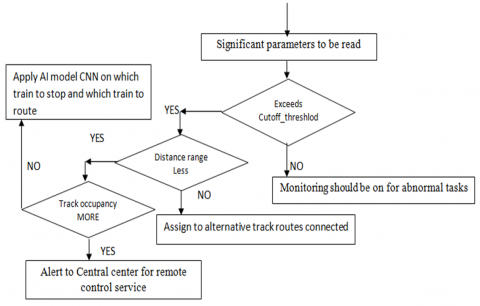
Figure 4. Activities of optimal hybrid system for avoidance of train collision
Figure 5. Flowchart for optimal hybrid system for avoidance of train collision
Pseudo_Procedure Optimal_hybrid_approach(transponders_data[][], sensors[][],ARVR[][].Cutoff_Thresholds[][], Role_AI[][]):
Input: Transpoders_data[][] denote trackside collected data, signals data
Sensors_data[][] denote data collected from sensors on weather conditions, train performance
ARVR[][] denote course of action plans for train operators, maintenance cost
Cutoff_Thresholds[][] denote weather data found abnormal, unhealthy of mechanical devices, automation issues, and complexity of AI
Flag[i] is initially 0 for all significant parameters that are in monitoring and changing due to external conditions.
Output: Accuracy, real time decision making
Step1: Read real time data of a train and its current location, conditions of transponders data, sensors Data
Step2: For each significant parameter, set up read values from sensors.
For parameter I to N
If (parameter_value[i] > Cutoff_thresholds[i])
Alert(“Beyond and abnormal than usual is recorded”)
Flag[i]=1
For all parameters, Flag[i] =1 means
Activate remote_control based on real time location of the train provided by GPS
Call Remote_control(track_occupancy[][], location_train[][])
Step3: Use ARVR for skilling train operators regularly on the upgradation of technology, and operating procedure.
Step4: Daily, compute accuracy at every heavy and,mass focused central location
Accuracy = Number of successful crossings when there is traffic on tracks / Total trains scheduled reached the central station
Step5: Monthly accuracy reports to be assessed for further enhancements and monitoring checkups.
In above procedure, mechanical devices would read present statistics of train running status and share to the centers dashboard. If the significant parameter values exceed the cutoff thresholds, must make use of remote controlling and AI model like CNN on effective decision making. The accuracy is computed based on number of successful crossings when train dangers are considered.
Procedure Remote_control(track_occupancy[][], location_train[][]):
Input: track_occupancy[][] denote track route with alternative empty_tracks
location_train[][] denote live location of the train and its condition
Output: Control the train from humen expert in the central location
Step1: Call GPS_monitoring(tracking_train_location[][])
Step2: Distance range to be identified with other train, and identify other empty tracks in that route connected.
Step3: If Distance_range_train1[significant_ID] < Distance_range_Train2[ID]
If(Track_occupancy_Train1, Track_occupancy_Train2)!=0)
Apply braking on Train2
Assign alternative track to Train1
else
Apply AI model CNN on which train to stop and switch the train to otherroute
If(Train_operation is in automatic mode):
Call CNN(Input: Tracks[],output:Vector[])
Else
Provide track number by remote controlling center authority
Step4: Must rely on internet for live train updates
Step5: Alert the Human expert to monitor and control non-significant train i.e. Train2
In above procedure, GPS monitoring helps to track live location of the train from the central station. If train is in danger situation, immediately control given to remote location, and based on conditions like trains occupancy on the track, number of tracks connected in the near distance are evaluated. Then, applying the brake, or assigning to other route via connected tracks is done.
Procedure CNN(Track [], location_train[][], Train_timings_tracks[][]):
Input: Tracks[] denote track number in the connected tracks location_train[][] denote live location of the train and its condition
Train_timings_tracks[][] denote time stamps of other trains on the tracks
Output: Control the train from human expert in the central location or remote location if train is not in automatic mode. If the train is in driver mode, switch the train to route (track) suggested by used CNN.
Step1: Input the features such as track[], timings_tracks[][]
Step2: Bringing the tracks that have timing near to current running train, as per nearest control center
Step3: Applying pooling based on timing of 5(t1) mins, 10(t2) mins, 15(t3) mins which are customized
Step4: Applying flattening and produces only tracks that are useful
Step5: Apply Softmax activation which output a vector but in which lower value is useful to switch
From Figure 5, the activities such as reading the sensors data, checking their values crossed the default thresholds or not. If they cross, alerts the driver as well as the control center. If they won't cross, everything is the normal. Then, Checks the track occupancy with other train if they are on the same track and approaches near in the same direction. As per control center, and GPS system, would divert one train (priority) to other track which minimize the chances of accident. The AI model such as CNN would be used and outputs a vector array based on tracks connected, and timings. The probability of each connected track, which has more value would be used by other train. The track which has least probability would be preferred to assign to the priority of train. In some scenarios, remote controlling is taken as priority, which directs decision to take up, and implement. This report is online and would be viewed by trains locomotive cabin display unit.
In this, specific metrics such as accuracy of hybrid approach against other approaches listed in Table 4 are demonstrated with key terms such as Low, Medium, High, Very High, Excellent keywords. From Table 4, it is observed that proposed system has outstanding performance than other approaches. Based on Accuracy, and Cost as metrics, the proposed system has derived such metrics in Table 5.
Table 4. Specific metrics impact over approaches
|
Approach |
Integration of Approaches |
Accuracy |
Reliability |
Cost-Effectiveness |
|
Standard approach |
Positive Train Control, Advanced Signaling Systems, Collision Avoidance Systems |
High |
High |
High |
|
Hybrid approach1 |
Positive Train Control, Remote Controlling, GPS Monitoring |
Very High |
Very High |
Medium |
|
Hybrid multi-modal approach (Hybrid approach2) |
Positive Train Control, Collision Avoidance Systems, Remote Controlling |
Very High |
Very High |
Low |
|
Enhanced hybrid optimal approach (proposed approach) |
Positive Train Control, Collision Avoidance Systems Remote Controlling, GPS Monitoring, Virtual and Augmented Reality, Artificial Intelligence |
Excellent |
Excellent |
Very Low |
Table 5. Performance of proposed system against other approaches
|
Approach |
Accuracy |
Cost |
|
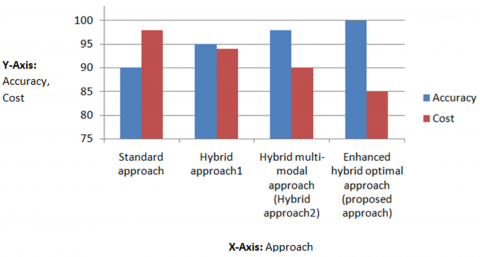
Standard approach |
90 |
98 |
|
Hybrid approach1 |
95 |
94 |
|
Hybrid multi-modal approach (Hybrid approach2) |
98 |
90 |
|
Enhanced hybrid optimal approach (proposed approach) |
99.99 |
85 |
From Table 5, the values are depicted in the Figure 6 in which accuracy, and cost are taken on Y-axis, and approaches are taken on X-axis. The drawn visual diagram is clearly stating proposed system results are excellent.
Figure 6. Accuracy, cost against enhanced hybrid optimal against other approaches
The hybrid system significantly reduces accident risks by integrating existing and emerging technologies such as remote controlling, GPS Monitoring, role of AI, and AR & VR support. The overall safety of the system is enhanced by integration of emerging of these technologies. Among those technologies, PTC helps to limit the speeds, restrict unauthorized movements, and apply brakes to maintain safety distances between trains on the same track. The second technology is CAS which detects unexpected objects means applying braking to stop the train. It uses inherent radar, lidar, cameras for achieving its purpose. Third component is GPS monitoring that helps to track train live location with the reliable network and satellite support. The fourth task is Remote control which helps human intervention during emergencies or to take action when PTC fails or even not to communicate with the train staff. The fifth task involved is role of AI model such as CNN with combination of ensemble method is to process the query and identifies potential issues. It alerts in advance when critical situation raises. The sixth task is AR & VR support which provides efficient training to the train operators, and improves accuracy by allowing remote center to assist for maintenance activities. The overall approach is multi-layered approach for providing expected safety to overcome the accidents.
[1] Rossetto, F., Baglio, F., Massaro, D., Alberoni, M., Nemni, R., Marchetti, A., Castelli, I. (2020). Social cognition in rehabilitation context: Different evolution of affective and cognitive theory of mind in mild cognitive impairment. Behavioural Neurology, 2020(1): 5204927. https://doi.org/10.1155/2020/5204927
[2] Lee, S.S., Powell, N.J., Esdaile, S. (2001). A functional model of cognitive rehabilitation in occupational therapy. Canadian Journal of Occupational Therapy, 68(1): 41-50. https://doi.org/10.1177/000841740106800105
[3] Restrepo-Escobar, S.M., Rincón-Barreto, D.M. (2019). Addictions rehabilitation from an executive functioning model. Addictive Disorders & Their Treatment, 18(2): 94-98. https://doi.org/10.1097/ADT.0000000000000156
[4] Hong, W.T., Clifton, G., Nelson, J.D. (2023). Railway accident causation analysis: Current approaches, challenges and potential solutions. Accident Analysis & Prevention, 186: 107049. https://doi.org/10.1016/j.aap.2023.107049
[5] Ahamed, B.T., Balaji, N., Raguram, R., Balasubramanian, S. (2024). A study of death due to railway accidents: An autopsy based cross sectional study conducted in a tertiary care hospital. Indian Journal of Forensic Medicine & Toxicology, 18(2): 66-69. https://doi.org/10.37506/xjkawe19
[6] SureshKumar, M., Malar, G.P., Harinisha, N., Shanmugapriya, P. (2022). Railway accident prevention using ultrasonic sensors. In 2022 International Conference on Power, Energy, Control and Transmission Systems (ICPECTS), Chennai, India, pp. 1-5. https://doi.org/10.1109/ICPECTS56089.2022.10047195
[7] Governance. (2023). Railway accidents in India: Causes and safety measures. https://www.drishtiias.com/ daily-updates/daily-news-editorials/railway-accidents-in-india-causes-and-safety-measures.
[8] Bhavsar, S.S., Kulkarni, A.N. (2016). Train collision avoidance system by using RFID. In 2016 International Conference on Computing, Analytics and Security Trends (CAST), Pune, India, pp. 30-34. https://doi.org/10.1109/CAST.2016.7914935
[9] Lee, K., Chae, E., Oh, S., Hwang, J. (2013). Study on train collision avoidance system for securing safe distance between trains. In 2013 International Conference on Electrical Machines and Systems (ICEMS), Busan, Korea (South), pp. 1342-1344. https://doi.org/10.1109/ICEMS.2013.6713274
[10] Ranawaka, M.N., Liyanage, K.S., Wickramasinghe, S.P., Chandrasekara, L.H.P.S.D., Chandrasiri, S.S., Weerathunga, L.I.E.P. (2021). Smart vehicle communication system for collision avoidance. In 2021 IEEE 12th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, pp. 548-554. https://doi.org/10.1109/UEMCON53757.2021.9666630
[11] Gundala, S., Sri, K.D., Sandhya, M., Prasad, G., Rakesh, B. (2022). Development of vehicle safety control for the anticipation of accidents using intelligence process. In 2022 3rd International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, pp. 1205-1211. https://doi.org/10.1109/ICESC54411. 2022.9885660
[12] Woo, S.G., Park, C., Lee, D., Lee, S.Y. (2020). Collision avoidance for unmanned aerial vehicles based on safety radius of the formation geometry. In 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea (South), pp. 179-183. https://doi.org/10.23919/ICCAS50221.2020.9268210
[13] Munoz-Castaner, J., Soto, P.C., Gil-Castineira, F., Gonzalez-Castano, F.J., Ballesteros, I., Di Giovanni, A., Villar, P.C. (2015). Your phone as a personal emergency beacon: A portable gsm base station to locate lost persons. IEEE Industrial Electronics Magazine, 9(4): 49-57. https://doi.org/10.1109/MIE.2015.2484922
[14] Amin, M.S., Jalil, J., Reaz, M.B.I. (2012). Accident detection and reporting system using GPS, GPRS and GSM technology. In 2012 International Conference on Informatics, Electronics & Vision (ICIEV), Dhaka, Bangladesh, pp. 640-643. https://doi.org/10.1109/ICIEV.2012.6317382
[15] Vidumina, N. (2023). Train accident prevention & breakdown detection using machine learning based safty system. In Train Accident Prevention & Breakdown Detection Using Machine Learning Based Safty System, Sri Lanka. https://www.researchgate.net/publication/369170315_Train_Accident_Prevention_Breakdown_Detection_using_Machine_Learning_based_Safty_System.
[16] Anil, P., Deekshith, A.S., Kiran, B., Kumar, C.M., Nagaraju, P. (2024). A model of accident avoiding system for trains. International Journal of Advanced Research in Arts, Science, Engineering & Management, 11(2): 5064-5068.
[17] Su, S., Liu, W., Zhu, Q., Li, R., Tang, T., Lv, J. (2022). A cooperative collision-avoidance control methodology for virtual coupling trains. Accident Analysis & Prevention, 173: 106703. https://doi.org/10.1016/ j.aap.2022.106703
[18] Pupavac, D., Marinac, A., Knežević, J. (2023). An estimate of the number of accidents and serious accidents in railway traffic. Periodica Polytechnica Transportation Engineering, 52(1): 59-66. https://doi.org/10.3311/PPtr.21753
[19] El Koursi, E.M., Bruyelle, J.L. (2016). Railway accident prevention and infrastructure protection. Journal of Civil Engineering and Architecture, 10: 96-107. https://doi.org/10.17265/1934-7359/2016.01.010
[20] Datta, N., Kumar, S., Mallick, A., Punetha, D. (2016). Eradication of elephant mortality and injury due to railway accidents through automatic tracking and alert system. In 2016 International Conference on Advances in Computing, Communication, & Automation (ICACCA) (Spring), Dehradun, India, pp. 1-4. https://doi.org/10.1109/ICACCA.2016.7578856
[21] Aher, S.B., Tiwari, D.R. (2018). Trends in causes and impacts of accidents in indian railway. Journal of the Social Sciences, 55(1-3): 34-44. https://doi.org/10.30901/24566756.2018/55.1-3.2226
[22] Procházka, J., Hošková-Mayerová, Š., Procházková, D. (2020). The risks connected with accidents on highways and railways. Quality & Quantity, 54: 1537-1548. https://doi.org/10.1007/s11135-019-00899-1
[23] Chopde, A., Gaikwad, M., Meshram, A., More, S. (2023). Solutions for railway platform accidents. International Journal for Research in Applied Science & Engineering Technology, 11(5): 6818-6822. https://doi.org/10.22214/ijraset.2023.53160
[24] Dey, N.S., Sangaraju, H.K.R. (2024). A particle swarm optimization inspired global and local stability driven predictive load balancing strategy. Indonesian Journal of Electrical Engineering and Computer Science, 35(3): 1688-1701. http://doi.org/10.11591/ijeecs.v35.i3.pp1688-1701
[25] Dey, N.S., Sangaraju, H.K.R. (2023). Hybrid load balancing strategy for cloud data centers with novel performance evaluation strategy. International Journal of Intelligent Systems and Applications in Engineering, 11(3): 883-908.