OPEN ACCESS
The integration of intermittent and volatile wind power poses a huge challenge to grid scheduling and operation. The challenge is difficult to tackle as the existing wind power forecast methods are faced with low accuracy and poor stability. To solve the problems, this paper probes deep into the macro- and micro-variation laws of wind power data sequence, and designs a short-term wind power prediction model based on the back-propagation neural network (BPNN) corrected by Markov chain. Specifically, the historical wind power data were adopted to train the model to the expected accuracy, while the measured data on wind power were used for pre-judgment and error correction. The author derived a state transition table of the Markov chain by dividing the error state interval, and corrected the BPNN prediction results with Markov state transition probability matrix, which eliminates the large error points. The experimental results show that the proposed model outperformed the original BPNN prediction model in accuracy, indicating that the model is a feasible solution for short and medium-term wind power forecast.
Markov chain, BP neural network, wind power forecast, combined forecast
Along with the rapid development of the world economy, the corresponding energy demand has also increased greatly and the traditional fossil energy is facing the threat of energy exhaustion. At the same time, climate warming and increasingly serious environmental pollution caused by large-scale consumption of traditional fossil energy are becoming more and more serious, which poses serious threat to ecosystem, social economy and human health. In order to deal with the shortage of traditional fossil energy and environmental pollution brought by traditional fossil energy, green energy has become the development direction of governments all around the world. In China’s “13th Five-year Plan”, the requirements for energy security and green production have also been put forward. As a green and renewable energy, wind power has been widely applied and developed in the world. With the exhaustion of non-renewable fossil fuels such as coal and the increasing pollution to the environment, the technology of clean energy generation represented by wind power has attracted more and more attention. However, wind power is featured with natural volatility, randomness and intermittence, which makes it very difficult to dispatch the power grid. Therefore, it is necessary to have accurate wind power forecast means to solve the above problems. The accuracy of wind power forecast is very vital to the electric power dispatching department and will directly affect the amount of power supply to the wind power plant and the reasonable dispatch of wind power by the electric power dispatching department, which is of great significance to both the enterprises and the electric power department.
Wind power generation has volatility and intermittence because of the instability of wind, which will make it difficult for the power grid to dispatch wind power. At present, the important direction to solve this problem is to forecast the wind power output during a period of time in the future. The results of the short-term forecast can help the power grid to carry out reasonable economic dispatch, unit commitment operation and select appropriate opportunity to maintain the draught fan. At present, the methods of short-term wind power forecast mainly include random time series method, artificial neural network method, Kalman filtering method, support vector machine method, and different combinations of these methods. Literature (Fan et al., 2008) is short-term load forecast method based on wavelet decomposition, fuzzy grey clustering and BP neural network. Literature (Xiao et al., 2014) proposes a new power prediction model based on discrete time Markov chain theory. In the literature (Liu and Huang, 2012), the prediction accuracy of short-term wind power is further improved by comparing the first-order and second-order Markov chain models with different number of state space and modeling data. Literature (Peng et al., 2011) proposes a model based on grey-Markov chain for short-term forecast of wind power, analyzes the error transition sequence of grey fitting value and establishes the Markov state transition probability matrix. Literature (Shi et al., 2010) proposes a new short-term wind speed prediction method which utilizes the signal analysis characteristics of wavelet packets and the unsteady data prediction characteristics of the peak Markov chain.
The above research has played a positive role in eliminating the adverse effect of random output of wind power plant on the power grid, and has also provided a good reference for further improving and optimizing the wind power forecast methods (Pang, 2010; Zhang et al., 2012; Zhou et al., 2012). However, the time series method requires less historical data, the prediction period is short and the single data can’t form a reasonable error estimate so that the abrupt-changed information can’t be recognized. The Kalman filtering method can capture the change law of wind power well and can update the state information continuously, and can obtain more accurate prediction result. However, it is not suitable for the volatility and the violent situation. The support vector machine method needs less data, has strong nonlinear learning ability, short training time, strong generalization ability, and can effectively overcome the curse of dimensionality and local minimal problem, but the accuracy is greatly influenced by the selected kernel function structure. Thus, it raises high requirements on the accuracy and completeness of kernel function. In view of the existing problems of short-term wind power methods, this study proposes a wind power combined prediction model based on BP neural network (Zhou et al., 2012). The experimental results show that the proposed method can effectively improve the accuracy and reliability of wind power forecast, and the prediction accuracy is higher than that of single BP neural network.
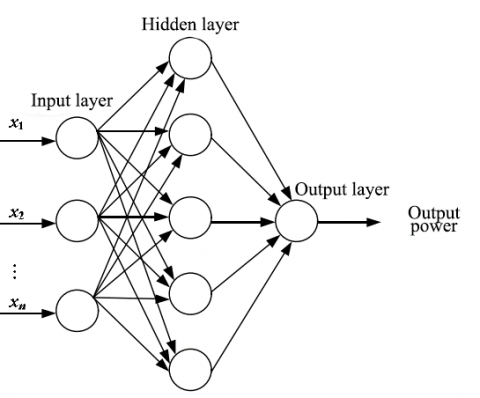
BP neural network is a multi-layer feedforward network trained according to error reverse propagation algorithm, represented by network topology, node characteristics and learning rules. It is one of the most widely used neural network models that can adaptively obtain the nonlinear mapping relationship between input and output by storing a large number of input-output mode relations through learning under unknown mathematical relation of constructed object and input parameters. In network learning, the error which is inconsistent with the expected value in the output layer is regarded as the error of connection weight and threshold value of each node in each layer, and the error is distributed to each node by transmitting the error in the output layer to the input layer by layer. By calculating the reference error of each node, each weight and threshold value can be adjusted until the error is the minimum (Zhang and Deng, 2013; Feng et al., 2014; Wang et al., 2008; Ding and Xu, 2011). BP algorithm adopts the steepest descent method in nonlinear programming, and modifies each weight according to the negative gradient direction of the error function. Generally, the application of BP neural network includes four steps: 1) to determine the network structure form; 2) to collect training and test samples; 3) to train the network model; 4) to carry out prediction analysis by using the trained network. Figure 1 is a schematic diagram of BP neural network prediction model, the topology of which includes an input layer, a hidden layer and an output layer.
Figure 1. BP neural network prediction model
Markov chain prediction is a prediction method to analyze the future development trend and possibility of random events according to the system state transition law discovered by Markov, a Russian mathematician. Its essence is to predict the probability of occurrence of time and predict the future change of time according to the present situation. The prediction of Markov chain mainly contains two processes: one is to determine the state space of Markov chain; the other one is to determine the state transition probability and the state transition matrix by calculation. The Markov chain prediction model can be expressed as:
$X ( n ) = X ( 0 ) P ^ { ( n ) }$ (1)
Where, X(n) is state probability vector at the moment of n; X(0) is state probability vector at the initial moment; P is state transition probability matrix.
The Formula (1) has the meaning of predicting the nth step according to P and X(0), and the key of the prediction is the determination of the state transition probability matrix P. According to the sample data, the number of occurrences of state i
is Ni, and the number of transition from state i to state j is Nij. Then the transition probability from state to state is approximately Nij/Ni, i.e.$P _ { i j } \approx \frac { N _ { i j } } { N _ { i } }$ (2)
Then the kth state transition probability matrix is:
$P ^ { ( k ) } = \left( \begin{array} { c c c } { P _ { 11 } ( k ) { P _ { 12 } } ( k ) } & { \dots . . . } & { P _ { 1 n } ( k ) } \\ { P _ { 21 } ( k ) { P _ { 22 } } ( k ) } & { \dots . . . } & { P _ { 2 n } ( k ) } \\ { \cdots . . . } & { \ldots . . . } & { \ldots . . . } \\ { P _ { n 1 } ^ { ( k ) } P _ { n 2 } ^ { ( k ) } } & { \ldots . . } & { P _ { n n } ^ { ( k ) } } \end{array} \right)$ (3)
In the solution of state probability, the classification of state is very important. The common methods are mean value-mean square error classification, cluster analysis and optimal segmentation.
4.1. Establishment process of corrected BP neural network model based on Markov chain
The basic idea of prediction: firstly, the prediction model of wind power BP neural network is established, then the error result predicted by BP neural network is analyzed by Markov chain model to find the fluctuation amplitude and fluctuation trend, and then the state transition probability matrix of error is obtained. According to the matrix, the prediction result of neural network is corrected.
The specific steps are as follows:
(1) BP neural network prediction model of wind power is constructed with MATLAB software, and the model is trained with a lot of measured power data.
(2) The sample data is selected as input data, and the wind power is preliminarily forecast by using the trained BP neural network, and the prediction relative error δ is obtained.
(3) The relative error δ of the predicted value of the sample data is divided into Markov state intervals, and a state transition table is obtained.
(4) A 1st-step state transition matrix P(1) or a kth-step state transition matrix P(k) is obtained from the state transition table.
(5) The initial state vector X(0) is determined.
(6) According to the state transition formula X(n)=X(0)
, the state transition result of 1st-step (when k=1) or kth-step is obtained.(7) The predicted value is corrected to $Q = Q ^ { \prime } \left( 1 - \delta ^ { * } \right) ,$ where $\delta ^ { * } = \left( \delta _ { \text {down } } + \delta _ { \text {up } } \right) / 2$
.Where, Q' is the prediction result of BP neural network, δdown and δup are the upper and lower-level thresholds in the error state interval.
4.2. Establishment of BP neural network model
The data used in the example is from the actual power data from a single wind turbine generator of an offshore wind farm in Zhejiang Province. These data are composed of wind power values with a time resolution of 15 min. There is a total of 672 data points from March 1 to March 7, 2018. The first four power data points are taken as input elements of BP neural network to predict the power output value at the next moment. There are 671 data groups in total. In order to establish an effective model and improve prediction accuracy, this study selects the first 550 sets of data with relatively small power fluctuation as model for training (Ching et al., 2015; Zhou et al., 2005). The 25 sets of data are used as prediction data.
4.2.1. Selection of transfer function
This study adopts a three-layer BP neural network to construct the prediction model. The first layer uses the tansig function and the second layer uses the logsig function. The corresponding transfer of each neuron in the model is Sigmoid function, which is defined as:
$f ( x ) = \frac { 1 } { 1 + e ^ { - x } }$ (4)
Where, x is the neuron input and f(x) is the neuron output.
4.2.2. Determination of parameters of the input layer
In the BP neural network model, the input and output parameters are very clear. The input is the wind power value of the first four adjacent time, and the output is the wind power value of the next moment. In the power prediction of the BP neural network, when the input data falls in the [-1, 1] interval, the convergence effect is optimal, and the prediction result accuracy is higher. Therefore, before the training of BP neural network, the input and output data are normalized first by the Formula (5) so that the input and output data are within the range of (0,1) and meet the specific requirements of the function:
$M ^ { \prime } = \left( M - M _ { \min } \right) / \left( M _ { \max } - M _ { \min } \right)$ (5)
Where, M is the historical wind power data of the wind power plant, Mmax is the upper limit value of the historical data, Mmin is the lower limit value of the historical data, and
is the normalized data. In Matlab, the function [Y,PS]=mapminmax(X) can be called to normalize the data. After obtaining the normalized predicted value, the predicted value is restored to the original dimension.4.2.3. Determination of the number of hidden layers and nodes
This study selects a single hidden layer network as the program. The determination of the number of nodes in the hidden layer is a very important link in the design of neural network. In general, the number of nodes in the hidden layer is calculated by the empirical formula $N = 2 N _ { i n } + 1$ or $N = \sqrt { N _ { i n } + N _ { o u t } }$, where N is the number of nodes in the hidden layer, Nin represents the number of neurons in the input layer of neural network, Nout represents the number of neurons in the output layer of the neural network, and the constant a is 1-10.
In the actual programming process, the node number of 8, 10, 12, 14 and 16 are respectively used for comparison, and the errors of different nodes are observed. The results show that when the number of nodes is 12, the network predicted value is closer to the target value and the error value is the smallest. Therefore, this study selects the number of nodes 12 as the parameter of the program after comparing with each other by cut-and-trial method.
4.2.4. Determination of error function and trained function
The error function used in training BP neural network is:
$E = \frac { 1 } { 2 } \sum _ { m = 1 } ^ { M } \left\| p _ { m } - p _ { m } ^ { \prime } \right\| ^ { 2 }$ (6)
Where, pm and pm' are actual and predicted wind power of the mth sample respectively; M represents the number of samples.
In training BP neural network, trainlm (BP training function), traingd (gradient descent BP algorithm function) or traingdm (gradient descent momentum BP algorithm function) are generally selected as training functions. After comprehensively analyzing the performance of all kinds of functions, this study finally selects trainlm whose time of training is the fewest. Although more memory is needed, its training speed and performance are obviously superior.
5.1. Prediction simulation of BP neural network
The trained BP neutral network model is used to predict the power of wind turbine generator in the next 6 hours. The prediction result is shown in Table 1.
5.2. Corrected prediction result based on Markov chain
The prediction accuracy of Markov chain is mainly determined by the transition matrix. In order to construct the transition matrix, it is necessary to reasonably divide the error state interval which is generally determined by mean value-mean square error classification method and centered on the mean value x of samples. The standard deviation is s $= \sqrt { \frac { 1 } { n - 1 } \sum _ { i = 1 } ^ { n } \left( x _ { i } - x \right) ^ { 2 } }$. In general, a data sequence can be divided into: $( \overline { x } - s , \overline { x } ) , \left( \overline { x } , ( \overline { x } + s\right)$ and $( \overline { x } + s , \overline { x } + 2 s )$.
As can be seen from Table 1, the error between the simulated value and the actual value is between -15% and 15%, the average error is $\overline { x }$=-1.546, and the standard deviation is s=10.41. According to mean value-standard deviation classification method, the Markov states are divided into E1=[-15%,-5%), E2=[-5%,5%), E3=[5%,15%] through the mean error and standard deviation of BP neural network simulation results. According to the above state division, the error state result of BP neural network can be obtained as shown in Table 2.
Table 1. Prediction result BP neural network
|
Time |
Measured value of power /kW |
Predicted value of BP neural network/ kW |
Relative error (ε/%) |
|
0:00 |
63.843 |
56.105 |
-12.12 |
|
0:15 |
106.968 |
112.573 |
5.24 |
|
0:30 |
97.781 |
98.329 |
0.56 |
|
0:45 |
235.875 |
235.401 |
7.43 |
|
1:00 |
131.812 |
155.415 |
-12.44 |
|
1:15 |
449.718 |
384.239 |
-14.56 |
|
1:30 |
327.281 |
345.118 |
5.45 |
|
1:45 |
151.593 |
161.856 |
6.77 |
|
2:00 |
137.531 |
159.068 |
13.66 |
|
2:15 |
152.531 |
140.496 |
-7.89 |
|
2:30 |
233.718 |
241.477 |
3.32 |
|
2:45 |
130.218 |
111.558 |
-14.33 |
|
3:00 |
175.593 |
151.238 |
-13.87 |
|
3:15 |
202.031 |
226.962 |
12.34 |
|
3:30 |
121.781 |
129.782 |
6.57 |
|
3:45 |
269.250 |
281.474 |
4.54 |
|
4:00 |
149.250 |
165.503 |
10.89 |
|
4:15 |
122.531 |
109.592 |
-10.56 |
|
4:30 |
453.843 |
394.344 |
-13.11 |
|
4:45 |
289.031 |
317.876 |
9.98 |
|
5:00 |
279.093 |
288.694 |
3.44 |
|
5:15 |
207.281 |
220.651 |
6.45 |
|
5:30 |
329.437 |
303.148 |
-7.98 |
|
5:45 |
141.843 |
122.779 |
-13.44 |
|
6:00 |
87.469 |
73.482 |
-14.99 |
Table 2. State division of Markov chain
|
Time |
Measured value of power /kW |
Predicted value of BP neural network/ kW |
Relative error (ε/%) |
State |
|
0:00 |
63.843 |
56.105 |
-12.12 |
E1 |
|
0:15 |
106.968 |
112.573 |
5.24 |
E3 |
|
0:30 |
97.781 |
98.329 |
0.56 |
E2 |
|
0:45 |
235.875 |
235.401 |
7.43 |
E3 |
|
1:00 |
131.812 |
155.415 |
-12.44 |
E1 |
|
1:15 |
449.718 |
384.239 |
-14.56 |
E1 |
|
1:30 |
327.281 |
345.118 |
5.45 |
E3 |
|
1:45 |
151.593 |
161.856 |
6.77 |
E3 |
|
2:00 |
137.531 |
159.068 |
13.66 |
E3 |
|
2:15 |
152.531 |
140.496 |
-7.89 |
E1 |
|
2:30 |
233.718 |
241.477 |
3.32 |
E2 |
|
2:45 |
130.218 |
111.558 |
-14.33 |
E1 |
|
3:00 |
175.593 |
151.238 |
-13.87 |
E1 |
|
3:15 |
202.031 |
226.962 |
12.34 |
E3 |
|
3:30 |
121.781 |
129.782 |
6.57 |
E3 |
|
3:45 |
269.250 |
281.474 |
4.54 |
E2 |
|
4:00 |
149.250 |
165.503 |
10.89 |
E3 |
|
4:15 |
122.531 |
109.592 |
-10.56 |
E1 |
|
4:30 |
453.843 |
394.344 |
-13.11 |
E1 |
|
4:45 |
289.031 |
317.876 |
9.98 |
E3 |
|
5:00 |
279.093 |
288.694 |
3.44 |
E2 |
|
5:15 |
207.281 |
220.651 |
6.45 |
E3 |
|
5:30 |
329.437 |
303.148 |
-7.98 |
E1 |
|
5:45 |
141.843 |
122.779 |
-13.44 |
E1 |
|
6:00 |
87.469 |
73.482 |
-14.99 |
E1 |
|
State |
E1 |
E2 |
E3 |
Total |
|
E1 |
5 |
1 |
4 |
10 |
|
E2 |
1 |
0 |
3 |
4 |
|
E3 |
4 |
3 |
3 |
10 |
|
Total |
10 |
4 |
10 |
24 |
Then a Markov chain state transition table is obtained, as shown in Table 3. From Table 3, the state transition probability matrix is obtained as follows:
$P ^ { ( 1 ) } = \left[ \begin{array} { c c c } { 0.5 } & { 0.1 } & { 0.4 } \\ { 0.25 } & { 0 } & { 0.75 } \\ { 0.4 } & { 0.3 } & { 0.3 } \end{array} \right]$ (7)
The prediction result of the BP neural network is corrected by the Markov state transition probability matrix, and the correction result is shown in Table 4.
Table 4. Error correction result of Markov Chain
|
Time |
Measured value of power /kW |
Predicted value of BP neural network/ kW |
Relative error (ε/%) |
Combined model predictive value /kW |
Relative error of combined model ε'/% |
|
0:00 |
63.843 |
56.105 |
-12.12 |
64.521 |
1.06 |
|
0:15 |
106.968 |
112.573 |
5.24 |
106.944 |
-0.02 |
|
0:30 |
97.781 |
98.329 |
0.56 |
93.412 |
-4.47 |
|
0:45 |
235.875 |
235.401 |
7.43 |
240.730 |
2.06 |
|
1:00 |
131.812 |
155.415 |
-12.44 |
132.727 |
0.69 |
|
1:15 |
449.718 |
384.239 |
-14.56 |
441.875 |
-1.74 |
|
1:30 |
327.281 |
345.118 |
5.45 |
327.862 |
0.18 |
|
1:45 |
151.593 |
161.856 |
6.77 |
153.763 |
1.43 |
|
2:00 |
137.531 |
159.068 |
15.66 |
135.208 |
-1.69 |
|
2:15 |
152.531 |
140.496 |
-7.89 |
147.521 |
-3.28 |
|
2:30 |
233.718 |
241.477 |
3.32 |
229.404 |
-1.85 |
|
2:45 |
130.218 |
111.558 |
-14.33 |
128.291 |
-1.48 |
|
3:00 |
175.593 |
151.238 |
-13.87 |
173.924 |
-0.95 |
|
3:15 |
202.031 |
226.962 |
12.34 |
192.917 |
-4.51 |
|
3:30 |
121.781 |
129.782 |
6.57 |
123.293 |
1.24 |
|
3:45 |
269.250 |
281.474 |
4.54 |
267.400 |
-0.69 |
|
4:00 |
149.250 |
165.503 |
10.89 |
140.678 |
-5.74 |
|
4:15 |
122.531 |
109.592 |
-10.56 |
126.030 |
2.86 |
|
4:30 |
453.843 |
394.344 |
-13.11 |
453.496 |
-0.08 |
|
4:45 |
289.031 |
317.876 |
9.98 |
301.982 |
4.48 |
|
5:00 |
279.093 |
288.694 |
3.44 |
274.259 |
-1.73 |
|
5:15 |
207.281 |
220.651 |
6.45 |
209.618 |
1.13 |
|
5:30 |
329.437 |
303.148 |
-7.98 |
318.305 |
-3.38 |
|
5:45 |
141.843 |
122.779 |
-13.44 |
141.196 |
-0.46 |
|
6:00 |
87.469 |
73.482 |
-15.99 |
84.505 |
-3.39 |
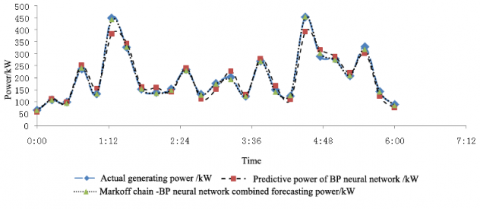
According to the data in Table 4, the actual generated power-BP neural network predicted power-Markov corrected predicted power changing curve and relative error curve chart are drawn, as shown in Figure 2 and Figure 3 below.
Figure 2. Comparison of actual power with predicted power and corrected power
By observing the curve of Figure 2, we find that the prediction curve of the two methods has basically the same trend with the actual power curve, and the prediction curve of Markov chain-BP neural network combined model has more coincidence with the actual power curve, which shows that the combined prediction method has higher accuracy than the BP neural network.
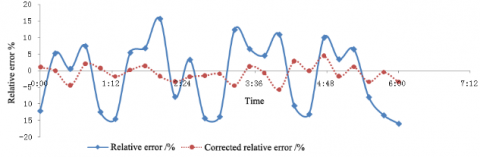
Figure 3. Contrast diagram of relative error before and after correction of Markov chain
It can be seen from Figure 3 that the changing trend of the relative error curve predicted by BP neural network is basically the same as that corrected by Markov chain, but the relative error data corrected by Markov chain is closer to zero and the fluctuation amplitude is smaller, indicating that the corrected data is closer to the measured value and the prediction stability is higher. Therefore, that prediction result of the BP neural network-Markov chain combined prediction model is closer to the actual value than that of the single BP neural network model, the prediction accuracy is higher, and the relative error ε is smaller than that of the BP neural network.
5.4. Error analysis
5.4.1. Selection of error formula
In order to standardize the evaluation of predicted performance, this study adopts RMSE (root-mean-square) error expression.
The predicted absolute error δt is the difference between the measured predicted value P'(t) and the true value P(t) at the moment t, namely
$\delta _ { t } = P ^ { \prime } ( t ) - P ( t )$ (8)
Predicted relative error:
$\varepsilon _ { t } = \frac { \delta _ { t } } { P ( t ) }$ (9)
Finally, the prediction error is defined as:
$E _ { \mathrm { RMSE } } = \sqrt { \frac { 1 } { N _ { \mathrm { T } } } \sum _ { h = 1 } ^ { \mathrm { N } _ { \mathrm { T } } } \varepsilon _ { t } ^ { 2 } }$ (10)
Where, NT is the number of data used to evaluate the prediction error during the training period.
5.4.2. Error analysis
24 sets of relative error data are analyzed, and the results are shown in Table 5 and Table 6 below.
Table 5. Prediction results of BP neural network
|
Absolute value of relative error |ε| |
Number |
Proportion |
|
<10% |
13 |
52.00% |
|
10%≤A<15% |
12 |
48.00% |
|
≥15% |
0 |
0.00% |
Table 6. Prediction results of BP neural network-Markov chain combined model
|
Absolute value of relative error |ε| |
Number |
Proportion |
|
<5% |
25 |
100% |
|
≥5% |
0 |
0.00% |
It can be seen from Table 4 and Table 5 that the BP neural network model and the combined prediction model have superior performance. There are 25 sets of data with relative error less than 15% in the BP neural network, accounting for 100%, and 25 sets of data with relative error less than 5% in the combined prediction model. The network coincidence rate is as high as 100%. After calculation, the RMSE predicted by BP neural network is 13.54%, and the RMSE corrected by Markov chain is 3.51%.
According to the Interim Measures for Power Prediction Management of Wind Power Plant issued by the National Energy Administration, it is stipulated that the maximum error of daily prediction curve provided by the power prediction system of wind power plant shall not exceed 25%, the real-time prediction error shall not exceed 15%, and the root-mean-square error of all-day prediction result shall be less than 20%. The wind power forecast can be divided into daily forecast and real-time forecast. The daily forecast is the forecast of the next 00:00 to 24:00 and the real-time forecast refers to the forecast of future 15 minutes to 4 hours and the time resolution is 15 minutes. The forecast time in this study is the wind power value in the next 6 hours, which belongs to real-time forecast.
After analyzing the power prediction error data, the prediction result of the combined prediction model established in this study are in full compliance with the relevant requirements of the interim measures for power prediction management of wind power plant, and the prediction accuracy is higher than that of BP neural network.
Based on the combined prediction model of BP neural network and Markov chain, this study comprehensively utilizes the advantages of neural network and Markov chain prediction, fully excavates the macro-variation and micro-fluctuation law of the data series and organically combines the two inherent qualities of the data series, which has a strict theoretical basis. By analyzing the short-term prediction results of a single wind turbine generator in an offshore wind power plant in Zhejiang Province, we find that the root-mean-square error of BP neural network is 13.54% and that corrected by Markov chain model is 3.51%. The combined prediction model has high accuracy and reliability. Therefore, it provides a new way to forecast wind power under the condition that the prior data are limited and there are a lot of uncertain factors.
The combined prediction model of BP neural network and Markov chain is an attempt to improve the traditional wind power forecast method of. The input data of BP neural network is historical wind power data and the numerical value of wind power is analyzed directly, which is different from the traditional meteorological data of numerical weather prediction. This method can avoid the accumulative prediction error caused by meteorological factors and further improve the prediction accuracy.
The correctness and reliability of BP neural network applied in generation power prediction of wind power plant are verified by an example, which has high practical value and reference significance. The prediction error of the model meets the relevant national regulations. Although artificial neuron can approximate arbitrary nonlinear mapping with arbitrary precision, traditional BP algorithm is slow in convergence speed and easy to fall into local minimum. Thus, many scholars will introduce more excellent prediction methods into wind power forecast. Along with the continuous development of wind power forecast technology, forecast method also develops from simplification to diversification. The combined forecast method makes full use of the data of each single method, which reduces the error and improves prediction accuracy.
In this study, the combined model of BP neural network and Markov chain in the field of wind power forecast is preliminarily studied and discussed. With the development of combined prediction model, BP neural network model and one or several other models are combined into a new prediction model to improve the accuracy of wind power forecast, which has been a major trend.
This work is supported by Humanities and Social Sciences project of the Ministry of Education (No.17YJCZH062).
Ching W. Q., Huang X. M., Wu G. B., Xiao D. Q. (2015). Markov chains: Models, algorithms and Applications. Beijing: Tsinghua University Press, Vol. 1-15, pp. 31-34.
Ding M., Xu N. Z. (2011). A method to forecast short-term output power of photovoltaic generation system based on Markov chain. Power System Technology, Vol. 35, No. 1, pp. 152-157. Http://doi.org/10.1016/S1000-9361(11)60014-9
Fan G. S., Wang W. S., Liu C., Dai H. Z. (2008). Wind power prediction based on artificial neural network. Proceedings of the CSEE, Vol. 28, No. 34, pp. 118-122.
Feng K., Ying Z. F., Wu J. J., Wan M. (2014). Short-term wind speed forecast based on wavelet packet decomposition and peak-type Markov chain. Journal of Nanjing University of Science and Technology, Vol. 38, No. 5, pp. 639-643.
Liu R. Y., Huang L. (2012). Wind power forecasting based on dynamic neural networks. Automation of Electric Power Systems, Vol. 36, No. 11, pp. 19-22. http://dx.doi.org/10.3969/j.issn.1000-1026.2012.11.004
Pang Q. L. (2010). A rough set-based neural network load forecasting algorithm and its application in short-term load forecasting. Power System Technology, Vol. 34, No. 12, pp. 168-173. http://doi.org/10.1109/CCECE.2010.5575154
Peng X. G., Hu S. F., Lv D. Y. (2011). Review on grid short-term load forecasting methods based on RBF neural network. Power System Protection and Control, Vol. 39, No. 11, pp. 144-148. Http://doi.org/10.1080/17415993.2010.547197
Shi B., Li Y. X., Yu X. H., Yan W. (2010). Short-term load forecasting based on modified particle swarm optimizer and fuzzy neural network model. Systems Engineering-Theory & Practice, Vol. 30, No. 1, pp. 157-166.
Wang Y. M., Yu X. J., Chang J. X., Huang Q. (2008). Prediction of runoff based on BP neural network and Markov model. Engineering Journal of Wuhan University, Vol. 41, No. 5, pp. 639-643.
Xiao Q., Li W. H., Li Z. G., Liu J. L., Liu H. Q. (2014). Wind speed and power prediction based on improved wavelet-BP neural network. Power System Protection and Control, Vol. 42, No. 15, pp. 80-86.
Zhang P., Pan X. P., Xue W. C. (2012). Short-term load forecasting based on wavelet decomposition, fuzzy gray correlation clustering and BP neural network. Electric Power Automation Equipment, Vol. 32, No. 11, pp. 121-125.
Zhang W., Deng Y. C. (2013). Short-term wind speed and wind power prediction based on the Grey-Markov chain. Electric Power, Vol. 46, No. 2, pp. 98-102.
Zhou F., Jin L. S., Liu J., Zhang Z. L. (2012). Probabilistic wind power forecasting based on multi-state space and hybrid Markov chain models. Automation of Electric Power Systems, Vol. 36, No. 6, pp. 29-33. http://dx.doi.org/10.3969/j.issn.1000-1026.2012.06.005
Zhou F., Jin L. S., Wang B. Q., Zhang Z. L. (2012). Analysis of the wind power forecasting performance based on high-order Markov chain models. Power System Protection and Control, Vol. 40, No. 6, pp. 6-10.
Zhou K. H., Kang Y. H. (2005). Neural network model and its matlab simulation program design. Beijing: Tsinghua University Press, Vol. 10-15, pp. 69-90.