Farah J. Al-Zahid*![]() | Nadia M. J. Ibrahem
| Nadia M. J. Ibrahem![]() | Suha Shihab
| Suha Shihab![]() | Nadia M. G. Al-Saidi
| Nadia M. G. Al-Saidi![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This study emphasizes the infinite-boundary integro-differential equation. To examine the approximate solution of the problem, two modified optimization algorithms are proposed based on generalized Laguerre functions. In the first technique, the proposed method is applied to the original problem by approximating the solution using the truncated generalized Laguerre polynomial of the unknown function, optimizing coefficients through error minimization, and transforming the integro-differential equation into an algebraic equation. In contrast, the second approach incorporates a penalty term into the objective function to effectively enforce boundary and integral constraints. This technique reduces the original problem to a mathematical optimization problem, making it easier to manage. The proposed methods are examined through various experiments, including numerical applications such as thermal, pharmacokinetic, oscillatory, aerodynamic, and ecological models, to demonstrate the validity, efficiency, and applicability of the techniques. Error analysis indicates that the approximation becomes more accurate as the number of generalized Laguerre basis functions increases.
integro-differential equation, generalized Laguerre polynomial, infinite-boundary problems, optimization techniques, convergence analysis
Integro-differential equations play a pivotal role in diverse scientific realms, spanning fluid dynamics [1, 2], biological models [3], and astrophysics [4, 5], and they are used to formulate a variety of physical phenomena. Their ubiquity stems from their ability to model a wide range of physical phenomena [6-9]. However, due to their inherent complexity, deriving analytical solutions for these equations proves challenging, necessitating the development of practical approximations, as it is difficult to solve them analytically. Recently, considerable attention has been directed towards using orthogonal polynomial techniques or wavelet methods for solving various problems [10-13]. In contrast, other studies have discussed the applicability of such approaches to approximately treat multiple kinds of integro-differential equations. The application of the Bernstein collocation technique has been extended by Acar [14] to the Stancu collocation technique for the approximate solution of a particular linear integro-differential equation arising from the motion of charged particles. Touchard polynomials and Lagrange Polynomials methods were explored in studies [15-17] for the solution of linear integro-differential equations, including Fredholm, Volterra, and integro-differential equations. Additionally, a novel strategy involving the implementation of the Rationalized Haar wavelet approximate algorithm with the Bernoulli polynomial technique was addressed by Rashid et al. [18]. Several additional investigations, including those using orthogonal basis functions referenced as studies [19-22], have also examined integro-differential equations, including a nonlinear integro-differential equation with a fractional order in complex space. Other works using the operational wavelet matrices of integration can be found in studies [23, 24].
A particular integro-differential equation is called an infinite-boundary integro-differential equation (IBDE) if one or both of its limits are improper. Such equations arise in several important models of tumor-immune system interaction, hematopoiesis, and plankton-nutrient interaction [25], as well as the elastic media problem [26]. Many issues of theoretical physics, electromagnetics, scattering problems, and boundary integral equations lead to IBDE of the second kind in the form,
$u^{\prime}(s)+a(s) u(s)=f(s)+\lambda \int_0^{\infty} k(s, t) u(t) d t$ (1)
along with the initial condition u(0) = α, where $\lambda \in \mathbb{R}$ is a parameter, both the functions a(s) and f(s) are continuous and the kernel k(s,t) might have a singularity in D = {(s,t): 0 ≤ s, t<∞} while u(s) is the unknown function that needs to be determined. Many researchers have developed an approximate method to solve infinite-boundary integro-differential equations using Galerkin and collocation methods with Laguerre and Hermite polynomials as basis functions [27, 28]. Several studies in the literature have utilized Laguerre polynomial expansions to approximate the IBDEs, particularly in studies [27-34]. However, such approaches have typically focused on evaluating the solution of certain IBDEs with degenerate kernels indirectly rather than solving such problems with any kernel function. Our findings illustrate that the two proposed algorithms yield similar results with fewer orders of generalized Laguerre polynomials, providing many numerical experiments that support the effectiveness depending on the error analysis with different L norms.
This work proposes two novel approximate techniques that combine the generalized Laguerre functions with the penalty optimization algorithm. For the first time, this proposed optimization technique is applied to solve an IBDE given in Eq. (1). The proposed method utilizes a generalized Laguerre series to obtain an approximate solution that converges rapidly and reduces the number of terms that can be computed efficiently. The methodology exhibits computational efficiency, rendering the technique readily implementable on a computer system. Numerous numerical experiments covering a range of applications, including thermal systems, drug accumulation, oscillatory responses, aerodynamic forces, and ecological models, are conducted to assess the efficacy of the proposed methods. These examples show the approach's precision, convergence, and broad applicability. This study presents the following contribution:
In addition to this introductory section, the remaining part of the paper is outlined as follows: The general form of Laguerre polynomials and their characteristics, such as orthogonality conditions and recurrence relations, are formulated in Section 2. Some new properties are also included in Section 2. The convergence analysis of the proposed approach is presented in Section 3. At the same time, the numerical solution methodology is detailed in Section 4, which includes the formulation of the suggested algorithms and the application of optimization techniques. The numerical results demonstrate the effectiveness and precision of the proposed approaches, which include several experiments as test cases, presented in Section 5. Section 6 concludes the paper with possible avenues for further work.
This section introduces Laguerre polynomials, including their explicit analytical formulation, recurrence relations, and general form. We also review their matrix representation and orthogonality properties, which are essential for developing effective numerical techniques for solving integro-differential equations. These properties simplify the computational process, allowing complex integral equations to be converted into an algebraic system of equations. The definition of Laguerre polynomials in general form is stated below.
Definition 2.1: Let g be an integer number. The Laguerre polynomials in general form Lg,n(s) are defined by the recurrence relation
$L_{g, n+1}(s)=\frac{1}{n+1}\left((2 n+1+g-s) L_{g, n}(s)-(n+g) L_{g, n-1}(s)\right), \quad n \geq 1$ (2)
With the initial conditions
$L_{g, 0}(s)=1, L_{g, 1}(s)=1+g-s$
It is mentioned here that from Lg,n(s) for special values of g, one can obtain the well-known Laguerre polynomials. Some of the Laguerre terms Lg,n(s) are listed as:
$\begin{gathered}L_{g, 0}(s)=1 \\ L_{g, 1}(s)=1+g-s \\ L_{g, 2}(s)=\frac{1}{2}\left((g+1)(g+2)-2(g+2) s+s^2\right) \\ L_{g, 3}(s)=\frac{1}{6}\left((g+1)(g+2)(g+3)-3(g+2)(g+3) s+3(g+3) s^2-s^3\right)\end{gathered}$
The leading coefficient of Lg,n(s) is equal to $(-1)^n \frac{1}{n!}$, for n = 1, 2, 3, 4, … as presented in the above terms.
Moreover, the explicit analytical formula for Lg,n(s) can be obtained through the following expression
$L_{g, n}(s)=\sum_{m=0}^n \frac{(-1)^m}{m!}\binom{n+g}{n-i} s^m, n=1,2,3, \ldots$
The polynomials Lg,n(s) have the orthogonal property concerning the following inner product
$\left\langle L_{g, n}(s), L_{g, m}(s)\right\rangle=\int_0^{\infty}\left(L_{g, n}(s) L_{g, m}(s) \omega(s)\right) d s$ (3)
where, ω(s) = e-ssn is the weight function.
Note that the general matrix form of Lg,n(s) can be written as:
$L_{g, n}(s)=H T(s)^T$ (4)
where, Lg,n(s) = [Lg,0(s) Lg,1(s) Lg,2(s) … Lg,n(s)], T(s) = [(1 s s2 … sn] and H is the following a triangular matrix:
$H=\left(\begin{array}{cccccc}h_{0,0} & 0 & 0 & 0 & \cdots & 0 \\ h_{1,0} & h_{1,1} & 0 & 0 & \cdots & 0 \\ h_{2,0} & h_{2,1} & h_{2,2} & 0 & \cdots & 0 \\ h_{3,0} & h_{3,1} & h_{3,2} & h_{3,3} & \cdots & 0 \\ h_{4,0} & h_{4,1} & h_{4,2} & h_{4,3} & \cdots & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots \\ h_{n, 0} & h_{n, 1} & h_{n, 2} & h_{n, 3} & \cdots & h_{n, n}\end{array}\right)$
The entries $h_{i j}$ can be evaluated as follows:
$h_{i j}=\left\{\begin{array}{cc}\frac{(-1)^i}{i!}, & \text { for } i=j, \\ 1, & \text { for } j=0, \\ \frac{1}{i}\left((2 i-1+g) h_{i-1, j}-h_{i-1, j-1}-(i-1+g) h_{i-2, j}\right), & \text { for } i>j, \\ 0, & \text { otherwise. }\end{array}\right.$
For example, the matrix H for $L_{0, n}(s)$ with n=4 is
$H=\left(\begin{array}{cccc}1 & 0 & 0 & 0 \\ 1 & -1 & 0 & 0 \\ 1 & -2 & \frac{1}{2} & 0 \\ 1 & -3 & \frac{3}{2} & \frac{-1}{6}\end{array}\right)$
The generalized polynomial $L_{g, n}(s)$ involves a shape parameter $g$. It is chosen in practice with $g=0$.
Under specific conditions, we show mathematically that the approximate solution derived from generalized Laguerre polynomials converges to the exact solution. The analysis demonstrates that the error decreases with increasing order of approximation, utilizing the orthogonality of Laguerre polynomials and the completeness of the Hilbert space. By examining the convergence behaviour, the validity of the suggested approach is verified for resolving integro-differential equations with infinite boundaries. Additionally, this analysis provides guidance on selecting the optimal number of Laguerre polynomials to achieve a balance between accuracy and computational efficiency.
Theorem 3.1: A function u(s) which is continuous on $[0, \infty]$ and satisfied the condition $|u(s)|<M$, M is a constant, can be approximated in terms of generalized Laguerre polynomials as below
$u(s)=\sum_{k=0}^{\infty} c_k L_{g, k}(s)$ (5)
where,
$c_k=\int_0^{\infty} e^{-s} s^n u(s) L_{g, k}(s) d s, k=0,1, \ldots$ (6)
Then
$u_n(s)=\sum_{k=0}^n c_k L_{g, k}(s)$ (7)
converges to the function u(s).
Proof. Let $u_n(s)=\sum_{k=0}^n c_k L_{g, k}(s)$, where $c_k=\int_0^{\infty} e^{-s} s^n u(s) L_{g, k}(s) d s$, then
$\int_0^{\infty} e^{-s} s^n u(s) u_n(s) d s=\int_0^{\infty}\left[e^{-s} s^n u(s) \sum_{k=0}^n c_k L_{g, k}(s)\right] d s$ (8)
where, u(s) is defined in Eq. (5). Using Eq. (6) to obtain
$\int_0^{\infty} e^{-s} s^n u(s) u_n(s) d s=\sum_{k=0}^n c_k \int_0^{\infty} e^{-s} s^n u(s) L_{g, k}(s) d s=\sum_{k=0}^n\left|c_k\right|^2$
This means that the function $u_n(s)$ convergence (since it is a Cauchy sequence in the complete Hilbert space $L^2[0, \infty]$).
To prove that the series in Eq. (7) converges to u(s), let
$u_m(s)=\sum_{k=0}^m c_k L_{g, k}(s) d s, for \,\,\, m <n$ (9)
Hence,
$\begin{aligned} & u_n(s)-u_m(s)=\sum_{k=0}^n c_k L_{g, k}(s) d s-\sum_{k=0}^m c_k L_{g, k}(s) d s & \text { for } n>m\end{aligned}$ (10)
Eq. (10) leads to $u_n(s)-u_m(s)=\sum_{i=m+1}^n c_k L_{g, k}(s) d s$, for $n>m$.
As a result,
$\left\|u_n(s)-u_m(s)\right\|^2=\sum_{k=m+1}^n\left|c_k\right|^2, n>m$ (11)
Hence, $\sum_{k=0}^{\infty}\left|c_k\right|^2$ is convergent.
From Eq. (10), one can conclude that $\left\|u_n(s)-u_m(s)\right\|^2 \rightarrow 0$ as $n, m \rightarrow \infty$ and $u_n(s) \rightarrow u(s)$ which is the required result.
The presented methods project the solution onto a suitable function space, offering a strong framework for integrating differential equations. Using generalized Laguerre polynomials as basis functions, these methods transform the infinite-boundary problem into numerical optimization problems. To discuss the approximate solution of the following special type of IBID defined in Eq. (1), two different algorithms based on generalized Laguerre functions are considered.
4.1 Method 1
The first method projects the solution onto a suitable function space, offering a strong framework for integrating differential equations. Using generalized Laguerre polynomials as basis functions, this method converts the infinite-boundary problem into a set of algebraic equations that can be calculated numerically.
Construct an approximation to u(s) using Laguerre polynomials with order n using Eq. (7), then one can obtain the first derivative in the form
$u^{\prime}(s)=\sum_{j=0}^n c_j L_j^{\prime}(s)$ (12)
where, $c_j$ represents the unknown coefficients and $L_j(\mathrm{s})$ the Laguerre polynomials.
By substituting Eq. (7) and (12) into (1) yields
$\sum_{j=0}^n c_j L_j^{\prime}(s)+a(s) \sum_{j=0}^n c_j L_j(s)=f(s)+\lambda \int_0^{\infty} k(s, t) \sum_{j=0}^n c_j L_j(t) d t$ (13)
Let
$h(t)=\int_0^{\infty} k(s, t) L_j(t) d t$ (14)
Then Eq. (13) can be written as
$\sum_{j=0}^n c_j\left(L_j^{\prime}(s)+a(s) L_j(s)-\lambda h_j(s)\right)=f(s)$ (15)
Multiplying Eq. (15) by $L_i(s)$, $i=0,1,2, \cdots, n$, and take the integration, yields
$\int_0^{\infty} \sum_{j=0}^n c_j\left(L_j^{\prime}(s)+a(s) L_j(s)-\lambda h_j(s)\right) L_j(s) d s=\int_0^{\infty} f(s) L_j(s) d s$
This can be written in the form
$\sum_{j=0}^n c_j\left\langle L_j^{\prime}(s)+a(s) L_j(s)-\lambda h_j(s), L_i(s)\right\rangle=\left\langle f(s), L_i(s)\right\rangle$. (16)
where, $\langle., .\rangle$ is the inner product.
Note that Eq. (16) gives respectively, the following equations for $i=0,1, \ldots, n$
$\begin{gathered}c_0\left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_0(s)\right\rangle+c_1\left\langle L_1^{\prime}(s)+a(s) L_1(s)-\right. \\ \left.\lambda h_1(s), L_0(s)\right\rangle+\cdots+c_n\left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_0(s)\right\rangle=\left\langle f(s), L_0(s)\right\rangle, \\ c_0\left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_1(s)\right\rangle+c_1\left\langle L_1^{\prime}(s)+a(s) L_1(s)-\right. \\ \left.\lambda h_1(s), L_1(s)\right\rangle+\cdots+c_n\left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_1(s)\right\rangle=\left\langle f(s), L_1(s)\right\rangle, \\ \vdots \\ c_0\left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_n(s)\right\rangle+c_1\left\langle L_1^{\prime}(s)+a(s) L_1(s)-\right. \\ \left.\lambda h_1(s), L_n(s)\right\rangle+\cdots+c_n\left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_n(s)\right\rangle=\left\langle f(s), L_n(s)\right\rangle\end{gathered}$
This can be written in matrix form as,
$A C=F$ (17)
where, the matrices A, C and F are respectively as follows:
$\left[\begin{array}{cccc}\left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_0(s)\right\rangle & \left\langle L_1^{\prime}(s)+a(s) L_1(s)-\lambda h_1(s), L_0(s)\right\rangle & \cdots & \left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_0(s)\right\rangle \\ \left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_1(s)\right\rangle & \left\langle L_1^{\prime}(s)+a(s) L_1(s)-\lambda h_1(s), L_1(s)\right\rangle & \cdots & \left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_1(s)\right\rangle \\ \vdots & \vdots & \cdots & \vdots \\ \left\langle L_0^{\prime}(s)+a(s) L_0(s)-\lambda h_0(s), L_n(s)\right\rangle & \left\langle L_1^{\prime}(s)+a(s) L_1(s)-\lambda h_1(s), L_n(s)\right\rangle & \cdots & \left\langle L_n^{\prime}(s)+a(s) L_n(s)-\lambda h_n(s), L_n(s)\right\rangle\end{array}\right]$
$\left[\begin{array}{c}c_0 \\ c_1 \\ \vdots \\ c_n\end{array}\right]$ and $\left[\begin{array}{c}\left\langle f(s), L_0(s)\right\rangle \\ \left\langle f(s), L_1(s)\right\rangle \\ \vdots \\ \left\langle f(s), L_n(s)\right\rangle\end{array}\right]$
The following steps can summarize the first algorithm:
Input: Degree n of Laguerre polynomials and given functions $a(s), f(s)$ and $k(s, t)$.
Output: Approximation of unknown function $u(s)$.
Step 1. Approximate the unknown function $u(s)$ using Eq. (7).
Step 2. Compute the $u^{\prime}(s)$ using Eq. (12).
Step 3. Compute numerically the integral term $h_j(s)=\int_0^{\infty} k(s, t) L_j(t) d t$ using Eq. (14).
Step 4. The result is a system of linear equations for the coefficients $c_j$.
Step 5. Solve the system of Eq. (17) for the coefficients $c_j$.
Step 6. Use the solved coefficients $c_j$ to construct the approximate solution.
$u_n(s)=\sum_{j=o}^n c_j L_j(s)$
Step 7. Calculate the error between the exact solution (if known) and the approximate solution for various values of n. Analyze convergence by increasing n.
4.2 Method 2
The second method involves approximating the complementarity problem by an equivalent nonlinear equation, which is achieved by adding a suitable penalty term that depends on specific parameters. It can be constructed with the following steps.
Input: Degree n of Laguerre polynomials and given functions $a(s), f(s)$ and $k(s, t)$.
Output: Approximation of unknown function $u(s)$.
Step 1. Approximate the unknown function $u(s)$ in Eq. (1) using Eq. (7).
Step 2. Compute the $u^{\prime}(s)$ using Eq. (12).
Step 3. Define the objective function based on minimizing the following error,
$J\left(c_1, c_2, \ldots, c_n\right)=\int_0^{\infty}\left[\sum_{j=0}^n c_j\left(L_j^{\prime}(s)+a(s) L_j(s)\right)-f(s)-\lambda \int_0^{\infty} k(s, t) \sum_{j=0}^n c_j L_j(t) d t\right]^2$ (18)
Step 4. Construct the modified objective function to impose the initial condition, then
$J_{m o d .}\left(c_1, c_2, \ldots, c_n\right)=\int_0^{\infty}\left[\sum_{j=0}^n c_j\left(L_j^{\prime}(s)+a(s) L_j(s)\right)-f(s)-\lambda \int_0^{\infty} k(s, t) \sum_{j=0}^n c_j L_j(t) d t\right]^2+\rho\left(\sum_{j=o}^n c_j L_j(0)-\alpha\right)=0$ (19)
where, ρ represents the penalty parameter.
Step 5. Use a suitable optimization technique to minimize $J_{mod.}\left(c_1, c_2, \ldots, c_n\right)$ in Eq. (19) to obtain the optimal coefficients $c_1, c_2, \ldots, c_n$ and then determine the approximate solution.
Note that methods such as fmincon (in MATLAB) can be used for constrained problems, while gradient descent or metaheuristic algorithms can be applied for unconstrained problems.
Step 6. Compare the approximate solution with the exact solution using error norms, such as absolute error, relative error, or root mean square error.
In this section, some problems are presented. The obtained results are compared with those of some previous studies. The accuracy of the approximated methods is checked based on the square root of the sum of squared errors norm $L_2$ and the max error norm $L_{\infty}$, respectively:
$\begin{gathered}L_2=\sqrt{\sum_{j=1}^N\left|u_{e x .}\left(s_j\right)-u_n\left(s_j\right)\right|^2} \\ L_{\infty}=\max _j\left[u_{e x .}\left(s_j\right)-u_n\left(s_j\right)\right], j=1,2, \ldots, N\end{gathered}$
where, un(s) and uex.(s) represent the approximate and exact solutions, respectively. The following examples display the actual and approximate values obtained using both method 1 and method 2 for various test cases with different n. The results are presented in table form. The computations are performed using MATLAB codes.
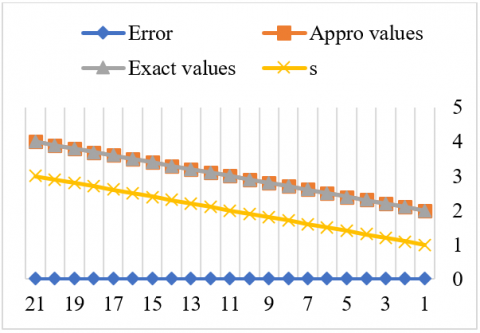
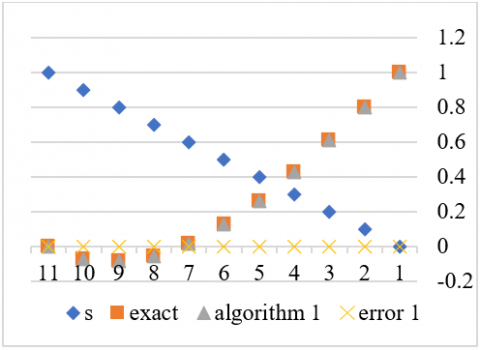
5.1 Experiment 1: Thermal system with memory response
This model captures historical temperature effects by simulating heat dissipation with memory.
$\begin{gathered}u^{\prime}(s)+u(s)=2+s-2 e^{-s}+\int_0^{\infty} e^{-(t+s)} u(t) d t \\ u(1)=2\end{gathered}$ (20)
The exact solution is u(s) = 1 + s. This equation can be interpreted as a simplified model of a thermal system with a memory-dependent response in this context:
The computed values of the error norms L∞ and L2 are tabulated in Table 1, while the approximate solutions along with absolute errors are plotted in Figure 1 against the exact solution for n = 6.
As seen from Table 1, both the error norms value L∞ and L2 are sufficiently small and satisfactorily acceptable, and method 1 produces accurate results that highly match the exact solution. Method 2 gives minimal error (typically < 10-4), which is acceptable in practical applications and proves its reliability. Furthermore, if the order of generalized Laguerre polynomials increases, the value of the error norms will decrease. That is, better results can be obtained if the value is larger.
Table 1. The norms L∞ and L2 for $s \in[1,2,3]$ for Eq. (20)
|
n |
Algorithm 1 |
Algorithm 2 |
||
|
L2 |
L∞ |
L2 |
L∞ |
|
|
6 |
0 |
0 |
0.0036 |
0.0034 |
(a) Using Algorithm 1
(b) Using Algorithm 2
Figure 1. The exact and approximate solutions of the thermal system with memory response
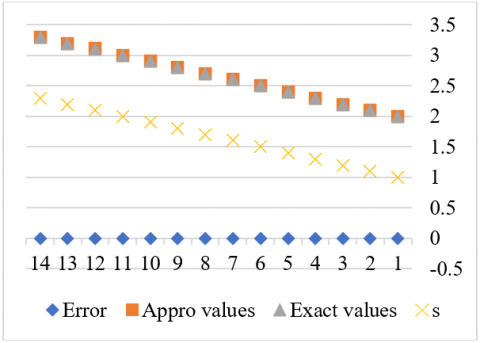
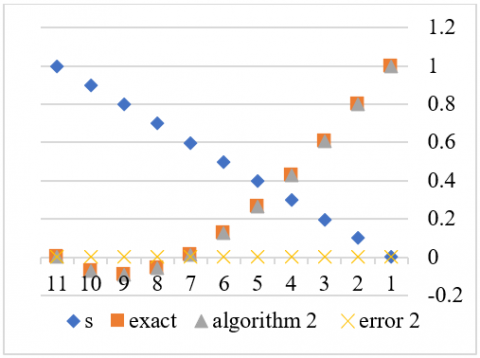
5.2 Experiment 2: Drug accumulation model with memory effect
The equation simulates the accumulation of drugs in memory-rich biological systems. Laguerre-based techniques provide a precise, error-free estimate of this experiment over time.
$\begin{gathered}u^{\prime}(s)+u(s)=2 s+s^2-2 e^{-s}+\int_0^{\infty} e^{-(t+s)} u(t) d t \\ \text { with } u(0)=0\end{gathered}$ (21)
Admits the exact solution u(s) = s2, and can be interpreted as a simplified model for drug accumulation in a biological system with a memory effect. This model can be expressed by:
$\int_0^{\infty} e^{-(t+s)} u(t) d t=e^{-s} \int_0^{\infty} e^{-t} u(t) d t$
Acts as a memory operator, capturing past drug concentrations exponentially, weighted cumulative influence. This is particularly relevant in pharmacokinetics, where the systemic impact of a drug depends not only on the current dosage but also on its historical presence in the bloodstream, the differential terms u'(s) + u(s) model the natural decay and metabolic elimination processes of the drug. The nonhomogeneous input 2s + s2 – 2e-s can represent time-dependent admonition or variable absorption dynamics.
Such a formulation is applicable in the release of medication systems, Chemotherapy treatment planning, Long-acting injectable (LAI) administration, Neuropharmacological models involving neurotransmitter uptake, and many other applications. The example in Eq. (21) demonstrates how integro-differential models can be utilized to simulate controlled drug delivery mechanisms with enhanced precision, thereby aiding in the optimization of dosage regimens to maintain therapeutic levels over prolonged periods. The computed values of the error norms value L∞ and L2 are tabulated in Table 2.
Table 2. The norms L∞ and L2 for $s \in[1,2]$ for Eq. (21)
|
n |
Algorithm 1 |
Algorithm 2 |
||
|
L2 |
L∞ |
L2 |
L∞ |
|
|
6 |
0 |
0 |
0 |
0 |
The approximate solutions, along with absolute errors, are plotted in Figure 2 against the exact solution for n=6.
(a) Using Algorithm 1
(b) Using Algorithm 2
Figure 2. The exact and approximate solutions for the drug model with memory effect
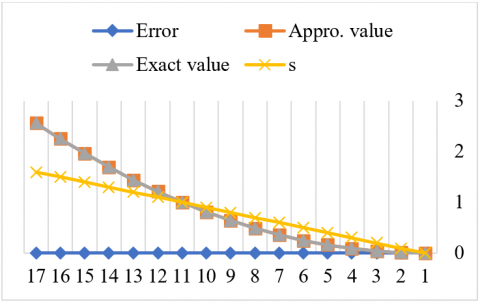
5.3 Experiment 3: Oscillatory system with memory response
This oscillatory model incorporates memory effects and sinusoidal input. Increasing the Laguerre polynomial order greatly enhances error reduction and convergence. The following integro-differential equation is used to express this experiment.
$u^{\prime}(s)+u(s)=\cos s+\sin s-0.5 \mathrm{e}^{-\mathrm{s}}+\int_0^{\infty} e^{-(t+s)} u(t) d t$ (22)
Here, λ = 1 and k(s, t) = e-(t+s), while the exact solution is u(s) = sin s.
This equation can be interpreted as a simplified model for a dynamical system subjected to a periodic input and exhibiting memory effects. Here's how each component of the equation contributes to the physical interpretation:
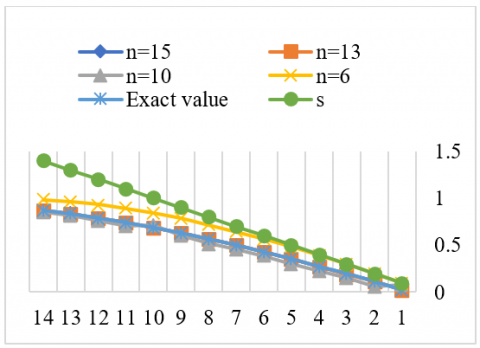
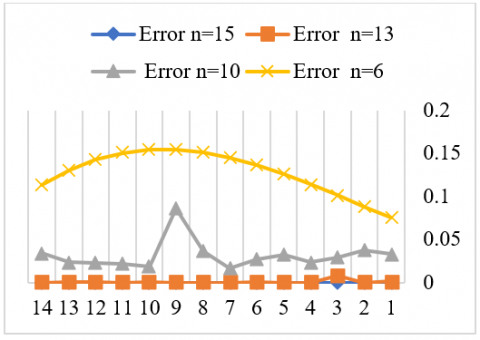
Table 3 shows the computed values of the error norms L∞ and L2 using Algorithm 2 for n = 6, 10, 13 and 15. Additionally, the approximate solutions are plotted using the same values and are illustrated in Figure 3. The absolute errors are illustrated in Figure 4. One can show that as n increases, the absolute error approaches zero; this means that the solution converges.
Table 3. The norms L∞ and L2 for $s \in[0.1,1.4]$ for Eq. (22)
|
n |
Algorithm 2 |
|
|
L2 |
L∞ |
|
|
6 |
0.235591 |
0.1014 |
|
10 |
0.017862 |
0.0293 |
|
13 |
0.000082 |
0.00087 |
|
15 |
0.000000 |
0.000000 |
As n increases, the absolute errors decrease significantly, and the results will rapidly tend to the exact values. The behaviors of the approximate solutions and the corresponding absolute errors for n = 6, 10, 13 and 15. And time step ∆t = 0.1 for $s \in[0.1,1.4]$ are shown in Figures 2 to 3.
As seen from Table 3, the error norms L∞ and L2 are sufficiently small and satisfactorily acceptable. Furthermore, it is clear from these tables that as the order of the generalized Laguerre functions n increases, the value of the error norms decreases. In addition, it is confirmed that the sequence of approximate solutions {un(s)} converge to the exact solution as n→∞. Mathematically, this means:
$lim _{n \rightarrow \infty}\left\|u(s)-u_n(s)\right\|=0$
The numerical data show:
Figure 3. The approximate solutions u(s) using the Lageurre polynomial and the exact solution with n = 6, 10, 13, 15 for Eq. (22)
Figure 4. The absolute errors with different n for Eq. (22)
5.4 Experiment 4
In this experiment, a decay system is presented and modeled by the integro-differential Eq. (23). Solving this model using both approaches, we found that it outperforms conventional methods with fewer basis terms and better accuracy.
$u^{\prime}(s)=\frac{1}{5}(-5+2 \sin s-\cos s) e^{-s}+\int_0^{\infty} e^{-(t+s)} \sin (t-s) u(t) d t$ (23)
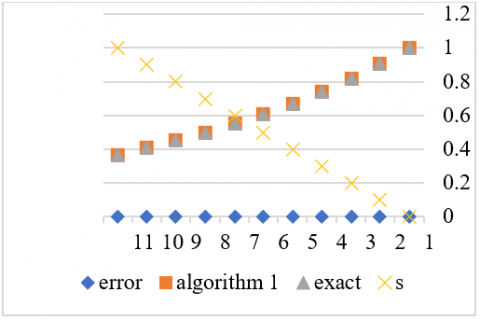
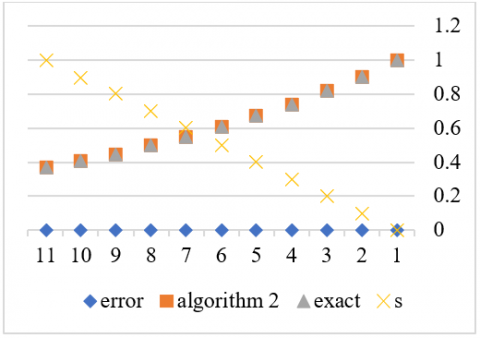
Here $\lambda=1$ and $k(s, t)=e^{-(t+s)}$. The exact solution is $u(s)=e^{-s}$. The two methods adopted in section 4 are applied to solve this problem. A comparison of the error norm values obtained by Algorithms 1 and 2 using the order $n=6$ with those which were obtained by the operation matrix of the integration method [27] using the orders $n=10,15$ is illustrated in Table 4. It can be observed from Table 4 that both the error norm values $L_{\infty}$ and $L_2$ obtained by the proposed methods are smaller than those obtained by Nik Long et al. [27]. This means that the present method provides better accuracy with fewer basis functions. The approximate solutions are plotted against the exact ones in Figure 5.
It can be concluded from the numerical results in Table 4, which utilize both the first and second algorithms, as well as the results obtained using the operation matrix of the integration method, that the proposed techniques yield a lower maximum absolute error and are superior to the operation matrix of the integration method with a small order of generalized Laguerre polynomials.
Table 4. The norms L∞ and L2 for $s \in[0.1,1.4]$ for Experiment 4
|
L-Norm |
Algorithm 1 |
Algorithm 2 |
Results [27] |
Results [27] |
|
n |
6 |
6 |
10 |
15 |
|
L∞ |
4.56×10-5 |
2.35×10-5 |
4.56721×10-4 |
2.35×10-5 |
|
L2 |
1.07×10-7 |
1.481×10-9 |
8.09515×10-9 |
1.6814×10-9 |
(a) Algorithm 1
(b) Algorithm 2
Figure 5. Graph of the absolute errors with n = 6 for Experiment 4
5.5 Experiment 5
For polynomial decay, Laguerre-based solutions correspond to exact values. With much lower absolute errors across the domain, both approaches show excellent performance. Consider the following integro-differential equation:
$u^{\prime}(s)=3 x^2+sin \,\, s-\frac{1}{2}(4+cos \,\,s)+\int_0^{\infty} e^{-(t+s)} sin (t-s) u(t) d t$ (24)
Here λ = 1 and k(s,t) = e-(t+s) the exact solution is u(s) = s3-2s + 1. The computed values of the error norms L∞ and L2 are tabulated in Table 5, while the approximate solutions along with absolute errors are plotted in Figure 6 against the exact solution for n = 6.
(a) Algorithm 1
(b) Algorithm 2
Figure 6. Solutions and absolute errors with n = 6 for Experiment 5
Table 5. The norms L∞ and L2 for $s \in[0.1,1.4]$ for Eq. (24)
|
L-Norm |
Algorithm 1 |
Algorithm 2 |
|
n |
6 |
6 |
|
L∞ |
4.56 × 10-5 |
9.68 × 10-5 |
|
L2 |
8.095 × 10-9 |
1.076 × 10-8 |
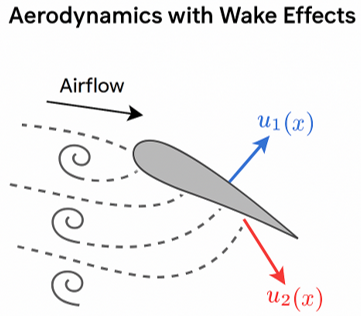
Figure 7. Aerodynamics with wake effects
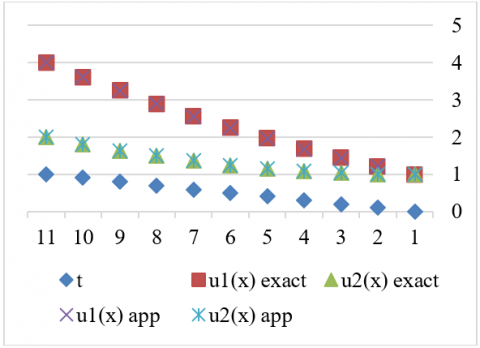
5.6 Experiment 6: The aerodynamics with wake effects
This model uses wake effects to capture lift and drag. Method two efficiently simulates the impact of historical airflow on present forces by employing penalty constraints. Imagine we have an airplane wing or a flapping wing. We want to calculate how lift and drag (the two main aerodynamic forces) change over time (see Figure 7).
The following system of first-order integro-differential equations is used to define this experiment.
$\begin{aligned} & \acute{u}_1(s)=f_1(s)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}\left(2 s+t^2\right)\left(u_1(t)+u_2(t)\right)\right] d t \\ & \acute{u}_2(s)=f_2(s)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}(t-s)^2\left(u_1(t)-u_2(t)\right)\right] d t\end{aligned}$ (25)
with the initial conditions u1(0) = 1, u1(0) = 1 And the exact solutions u1(s) = s2 + 2s + 1, u2(s) = s2+1.
The unknown functions are: u1(s) (Lift force at time s and u2(s) (Drag force at time s). These forces do not depend solely on what is happening at the present moment. They also rely on the history of airflow and vortices, which is called the wake effect, as shown in the following two equations,
Lift equation
$\acute{u}_1(s)=$ local lift effects $+\int_0^{\infty}$ [wake influence on lift] $d t$
Drag equation
$\acute{u}_2(s)=$ local drag effects $+\int_0^{\infty}[$wake influence on drag$] d t$
Using f1(s), we have
$\begin{aligned} & \acute{u}_1(s)=f_1(s)+\int_0^{\infty}\left[K_1(s)\left(u_1(t)+u_2(t)\right)\right] d t \\ & \acute{u}_2(s)=f_2(s)+\int_0^{\infty}\left[K_2(s)\left(u_1(t)-u_2(t)\right)\right] d t\end{aligned}$
where, $f_1(s)$ and $f_2(s)$ are the instantaneous lift and drag (from the angle, speed, etc.). $K_1(s)$ and $K_2(s)$ are functions that describe how past airflow (wake) influences the current forces, and how the past vortices lose strength over time (due to the $e^{-t}$ terms) and how they interact with the current position s (due to $\left(2 s+t^2\right)$). These mean that when the wing moves, it creates swirling air behind it (vortices), which affects the airflow that hits the wing later, changing the lift and drag. That's why we include the integral terms: they remember the past airflow.
The objective function of the problem is identified for minimization by Algorithm 2. Using Eq. (1), then Eq. (7) and Eq. (18), to obtain
$\begin{aligned} & \sum_{j=o}^n a \acute{L}_j(x)=f_1(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}\left(2 x+t^2\right)\left(\sum_{j=o}^n a_j L_j(x)+\sum_{j=o}^n b_j L_j(x)\right)\right] d t \\ & \sum_{j=o}^n b_j \acute{L}_j(x)=f_2(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}(t-x)^2\left(\sum_{j=o}^n a_j L_j(x)-\sum_{j=o}^n b_j L_j(x)\right)\right] d t\end{aligned}$
where, $u_1(0)=1, u_2(0)=1$.
The integral of the following error functional generates the first part of the regarded objective function.
$\begin{gathered}\int_0^{\infty}\left\{\left[\sum_{j=o}^n a_j \acute{L}_j(x)-f_1(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}\left(2 x+t^2\right)\left(\sum_{j=o}^n a_j L_j(x)+\sum_{j=o}^n b_j L_j(x)\right)\right] d t\right]^2+\right. \\ \left.\sum_{j=o}^n\left[b_j^{\prime} L_j(x)-f_2(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}(t-x)^2\left(\sum_{j=o}^n a_j L_j(x)-\sum_{j=o}^n b_j L_j(x)\right)\right] d t\right]^2\right\}\end{gathered}$
If the penalty method is utilized to impose the initial conditions, then
$\begin{gathered}\int_0^{\infty}\left\{\left[\sum_{j=o}^n a_j L_j(x)-f_1(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}\left(2 x+t^2\right)\left(\sum_{j=o}^n a_j L_j(x)+\sum_{j=o}^n b_j L_j(x)\right)\right] d t\right]^2+\right. \\ \left.\sum_{j=o}^n\left[b_j^{\prime} L_j(x)-f_2(x)+\int_0^{\infty}\left[t^{\frac{1}{2}} e^{-t}(t-x)^2\left(\sum_{j=o}^n a_j L_j(x)-\sum_{j=o}^n b_j L_j(x)\right)\right] d t\right]^2\right\}+\rho_1\left(\sum_{j=o}^n a_j L_j(0)-1\right)+ \\ \rho_1\left(\sum_{j=o}^n b L_j(0)-1\right)=0\end{gathered}$
where, ρ1 and ρ2 are the penalty parameters.
(a) The solutions
(b) The absolute error
Figure 8. The results for system (25)
Table 6. The norms L∞ and L2 values for $s \in[0.1,1.4]$ for system (25)
|
Error Analysis |
Algorithm 2 (n = 6) |
|
|
u1(s) |
u2(s) |
|
|
L∞ |
4.33 × 10-5 |
9.94 × 10-5 |
|
L2 |
2.83 × 10-8 |
2.31 × 10-9 |
The computed values of the error norms L∞ and L2 are tabulated in Table 6 with n = 20 and ρ1 = ρ2 = 10 while the approximate solutions along with absolute errors are plotted in Figure 8 against the exact solution for n = 6.
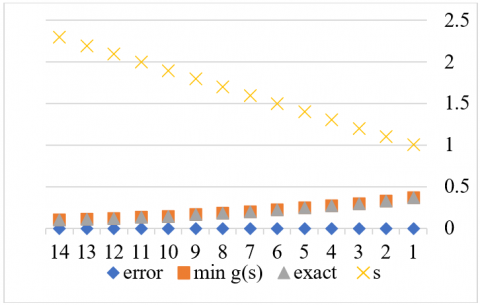
5.7 Experiment 7: Ecology with variable limit of integration
An integral limit that varies with time is used to model the dynamics of female populations. This approach yields precise, low-error approximations and effectively manages variable domains. We apply the proposed methods to solve the female population problem in this experiment.
$B^{\prime}(t)=g(t)+\int_0^t k(t, \sigma) B(\sigma) d \sigma$
where, $k(t-\sigma)$, $B(t)$ and $g(t)$ represent respectively the net maternity function of the female class age σ at time t. The number of female births and the contribution of births are already present at the time t.
Let the number of female birth is given by $g(t)=0.25\left(6(1+t)-7 e^{0.5 t}-4 \sin t\right)$, $k(t-\sigma)=t-\sigma, t \in[0,1]$, then the model takes the form as below:
$B^{\prime}(t)-\int_0^t(t-\sigma) B(\sigma) d \sigma=0.25\left(6(1+t)-7 e^{0.5 t}-4 \sin t\right), B(0)=1$ (26)
The exact solution of the model is $B(t)=0.5\left(e^{0.5 t}-\right. \sin t+\cos t)$.
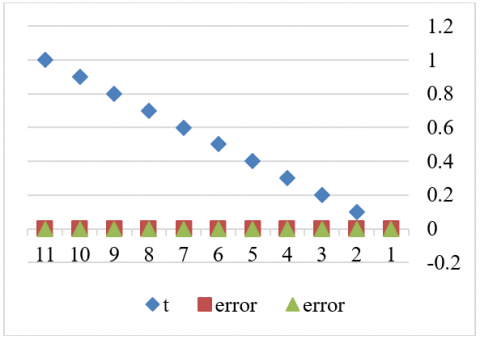
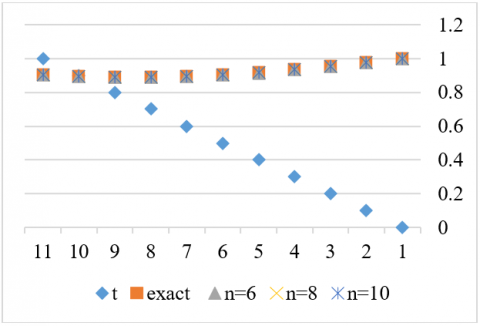
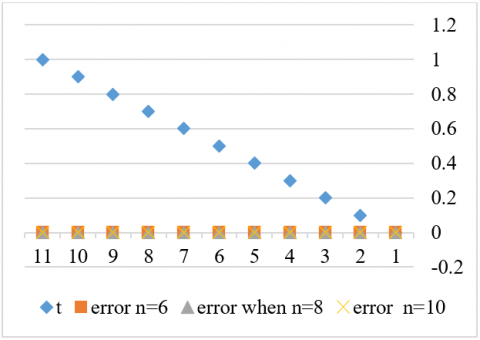
Table 7 shows the computed values of the error norms L∞ and L2 using Algorithm 2 for n = 6, 8, 10. Additionally, the approximate solutions are plotted using the same values and illustrated in Figure 9(a). The absolute errors are illustrated in Figure 9(b). One can show that as n increases, the absolute error approaches zero.
This method creates a new problem, which we solve by reducing the computational effort. Examples demonstrate that our method is better and more flexible than others. Another advantage of this method is its simplicity of application.
Table 7. The norms L∞ and L2 for $s \in[0.1,1.4]$ for Eq. (26)
|
|
Algorithm 1 |
|
|
n |
L∞ |
L2 |
|
6 |
0.001123 |
1.463 × 10-6 |
|
8 |
1.64 × 10-7 |
1.515 × 10-8 |
|
10 |
0.000000 |
0.000000 |
(a) The solution B(t)
(b) Absolute errors
Figure 9. The results for Eq. (26) with n = 6, 8 and 10
Several classical approaches have been employed to solve integro-differential equations, including operational matrix methods, spectral techniques, and collocation-based formulations. However, these methods often suffer from important limitations. For instance, operational matrix approaches, while algebraically efficient, may lose stability and accuracy when handling complex or singular kernels, particularly over unbounded domains. Traditional spectral methods generally require global smoothness of the solution and may exhibit Gibbs phenomena near discontinuities or sharp gradients. Similarly, collocation techniques depend heavily on node selection and may produce oscillatory errors if the function exhibits non-polynomial behavior.
In contrast, the present method incorporates generalized Laguerre polynomials, which are inherently suited for semi-infinite domains due to their exponential decay. Moreover, by embedding the solution into an optimization framework, particularly method 2, we relax the dependence on exact boundary satisfaction and improve stability even for non-polynomial or weakly smooth solutions. Numerical examples presented in this study confirm the method’s robustness and high accuracy under such conditions.
The results of the experiments demonstrate the adaptability and resilience of the suggested methods in resolving a range of integro-differential models. Furthermore, although the evaluated applications primarily addressed one-dimensional issues, the current framework would need to be extended to address real-world scenarios, such as spatially structured biological systems or multidimensional airflow in aerodynamics. Across physical, biological, and engineering problems with infinite boundaries and memory-dependent behaviors, they demonstrate exceptional accuracy, fast convergence, and adaptability.
[1] Petrin, A.B. (1997). Integro-differential equation method in the hydrodynamics of an incompressible viscous fluid. Journal of Experimental and Theoretical Physics, 85(4): 724-727. https://doi.org/10.1134/1.558359
[2] Kumar, S., Hamid, I. (2022). Dynamics of closed-form invariant solutions and diversity of wave profiles of (2+1)-dimensional Ito integro-differential equation via Lie symmetry analysis. Journal of Ocean Engineering and Science. https://doi.org/10.1016/j.joes.2022.06.017
[3] Hamlin, D., Leary, R. (1987). Methods for using an integro-differential equation as a model of tree height growth. Canadian Journal of Forest Research, 17(5): 353-356. https://doi.org/10.1139/x87-061
[4] Kumar, R., Bakhtawar, S., Emadifa, H. (2024). Exploring solution strategies for Volterra integro-differential Lane–Emden Equations in astrophysics using Haar Scale 3 wavelets. Advances in Mathematical Physics, 2024(1): 1-20. https://doi.org/10.1155/2024/5561911
[5] Alhazmi, S.E., Abdou, M.A. (2023). A physical phenomenon for the fractional nonlinear mixed integro-differential equation using a general discontinuous kernel. Fractal and Fractional, 7(2): 173. https://doi.org/10.3390/fractalfract7020173
[6] Khodabakhshi, P., Reddy, J.N. (2015). A unified integro-differential nonlocal model. International Journal of Engineering Science, 95: 60-75. https://doi.org/10.1016/j.ijengsci.2015.06.006
[7] Al-Saidi, N.M.G., Natiq, H., Baleanu, D., Ibrahim, R.W. (2023). The dynamic and discrete systems of variable fractional order in the sense of the Lozi structure map. AIMS Mathematics, 8(1): 733-751. https://doi.org/10.3934/math.2023035
[8] Aldoury, R.S., Al-Saidi, N.M.G., Ibrahim, R.W., Kahtan, H. (2023). A new X-ray images enhancement method using a class of fractional differential equation. MethodsX, 11: 102264. https://doi.org/10.1016/j.mex.2023.102264
[9] Ali, D.S., Ibrahim, R.W., Baleanu, D., Al-Saidi, N.M.G. (2024). Generalized fractional integral operator in a complex domain. Studia Universitatis Babeş-Bolyai, Mathematica, 69(2): 283-297. https://doi.org/10.24193/subbmath.2024.2.03
[10] Hussain, F., Shihab, S. (2024). Transforming controlled duffing oscillator to optimization schemes using new symmetry-shifted G(t) polynomials. Symmetry, 16(7): 915. https://doi.org/10.3390/sym16070915
[11] Abass, G., Shihab, S. (2023). Operational matrix of new shifted wavelet functions for solving optimal control problem. Mathematics, 11(14): 3040. https://doi.org/10.3390/math11143040
[12] Al-Zahed F.J., Zboon, R.A. (2018). An approximate solution to an optimal control problem of walking robot via. non-classical variational approach. Journal of Engineering and Applied Sciences, 13(23): 9849-9861.
[13] AL-Zahed, F.J., Zboon, R.A. (2020). Approximate solution to finite of linear control system collection of linear control system and its application to robotic manipulator problem. Journal of Engineering and Applied Sciences, 12(4): 273-290. https://doi.org/10.5373/JARDCS/V12I4/20201442
[14] Acar, N.İ. (2024). An extended numerical method by Stancu polynomials for solution of integro-differential equations arising in oscillating magnetic fields. Advances in Pure Mathematics, 14(10): 785-796. https://doi.org/10.4236/apm.2024.1410043
[15] Jalil Talab Abdullah, J.T. (2021). Numerical solution for linear Fredholm integro-differential equation using Touchard polynomials. Baghdad Science Journal, 18(2): 330-337. https://doi.org/10.21123/bsj.2021.18.2.0330
[16] Salman, N., Mustfaf, M.M. (2022). Numerical solution of fractional Volterra-Fredholm integro-differential equation using Lagrange polynomials. Baghdad Science Journal, 17(4): 3. https://doi.org/10.21123/bsj.2020.17.4.1234
[17] Oyedepo, T., Ajileye, G., Ayoade, A.A. (2014). Bernstein computational algorithm for integro-differential equations. Partial Differential Equations in Applied Mathematics, 11: 100897. https://doi.org/10.1016/j.padiff.2024.100897
[18] Rashid, H.H., Srivastava, H.M., Hama, M., Mohammed, P.O., Al-Sarairah, E., Almusawa, M.Y. (2023). New numerical results on existence of Volterra–Fredholm integral equation of nonlinear boundary integro-differential type. Symmetry, 15(6): 1144. https://doi.org/10.3390/sym15061144
[19] Ogunwobo, Z.O., Akinasnya, A.Q., Taiwo, O.A. (2025). Numerical solution of integral and integro-differential equations by some constructed orthogonal polynomials as the bases functions. Journal of Fractional Calculus and Applications, 16(1): 1-29. https://doi.org/10.21608/jfca.2025.291197.1108
[20] Alharbi, F., Althubiti, S. (2024). Numerical simulation of initial value problem of integro-differential equation models. European Journal of Pure and Applied Mathematics, 17(1): 286-299. https://doi.org/10.29020/nybg.ejpam.v17i1.5024
[21] Shammaky, A.E., Youssef, E.M., Abdou, M.A., ElBorai, M.M., ElSayed, W.G., Taha, M. (2023). A new technique for solving a nonlinear integro-differential equation with fractional order in complex space. Fractal and Fractional, 7(11): 796. https://doi.org/10.3390/fractalfract7110796
[22] Durmaz, M.E., Cakir, M., Amirali, I., Amiraliyev, G.M. (2022). Numerical solution of singularly perturbed Fredholm integro-differential equations by homogeneous second order difference method. Journal of Computational and Applied Mathematics, 412: 114327. https://doi.org/10.1016/j.cam.2022.114327
[23] Shihab, S.N., Ouda, E.H., Ibraheem, S.F. (2021). Boubaker wavelets functions: Properties and applications. Baghdad Science Journal, 18(4): 1226-1233. https://doi.org/10.21123/bsj.2021.18.4.1226
[24] Behera, S., Saha Ray, S.S. (2020). An operational matrix based scheme for numerical solutions of nonlinear weakly singular partial integro-differential equations. Applied Mathematics and Computation, 367: 124771. https://doi.org/10.1016/j.amc.2019.124771
[25] Goltser, Y., Domoshnitsky, A. (2013). About reducing integro-differential equations with infinite limits of integration to systems of ordinary differential equations. Advances in Difference Equations, 2013: 187. https://doi.org/10.1186/1687-1847-2013-187
[26] Seddeek, M.A., Abdou, M.A., El-Sayed, W.G., El-Saedy, F.M. (2012). Complex potential functions and integro-differential equation in elastic media problem in presence of heat. American Journal of Fluid Dynamics, 2(4): 31-41. https://doi.org/10.5923/j.ajfd.20120204.02
[27] Nik Long, N.M.A., Eshkuvatov Z.K., Yaghobifar, M., Hasan, M. (2008). Numerical solution of infinite boundary integral equation by using Galerkin method with Laguerre polynomials. International Journal of Computational and Mathematical Sciences, 2(11): 800-803. https://publications.waset.org/120.pdf.
[28] Matinfar, M., Riahifar, A. (2018). Application of Laguerre polynomials for solving infinite boundary integro-differential equations. International Journal of Industrial Mathematics, 10(2): 143-149. https://sanad.iau.ir/fa/Journal/ijim/Article/845371.
[29] Sanikidze, D.G. (2005). On the numerical solution of a class of singular integral equations on an infinite interval. Differential Equations, 41(9): 1353-1358. https://doi.org/10.1007/s10625-005-0285-0
[30] Matinfar, M., Riahifar, A. (2016). A matrix method for system of integro-differential equations by using generalized Laguerre polynomials. Iranian Journal of Numerical Analysis and Optimization, 6(2): 85-98. https://doi.org/10.22067/ijnao.v6i2.45227
[31] Soradi-Zeid, S., Alipour, M. (2024). A collocation method using generalized Laguerre polynomials for solving nonlinear optimal control problems governed by integro-differential equations. Journal of Computational and Applied Mathematics, 436: 115410. https://doi.org/10.1016/j.cam.2023.115410
[32] Ramsey, G.P. (1982). The Laguerre method for solving integro-differential equations. Journal of Computational Physics, 60(1): 97-118. https://doi.org/10.1016/0021-9991(85)90019-1
[33] Mane, S.T., Lodhi, R.K. (2024). Hybrid difference scheme for singularly perturbed differential equation with discontinuous source term. Mathematical Modelling of Engineering Problems, 11(1): 169-176. https://doi.org/10.18280/mmep.110118
[34] Alkhammash, H.I., Satti, L.M., Ahmad, N., Althobaiti, A., Ullah, N., Babqi, A.J., Ibeas, A. (2023). Optimization of proportional resonant and proportional integral controls using particle swarm optimization technique for PV grid tied inverter. Mathematical Modelling of Engineering Problems, 10(1): 23-30. https://doi.org/10.18280/mmep.100103