B. S. Chandrashekar*![]() | H. S. Nagendraswamy
| H. S. Nagendraswamy![]() | M. P. Pavan Kumar
| M. P. Pavan Kumar![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Computer vision-based approaches to bird species classification have been extensively studied by researchers over the past few decades. Manually classifying bird species based on their appearance in real-time is a complex and time-consuming task. However, advancements in image-capturing technology and the integration of machine learning techniques have made it possible to automatically classify bird species and assist ecologists in studying bird population trends, identifying endangered species, and assessing the impacts of habitat loss, climate change, and pollution on bird populations. Considering this, the present research proposes an approach that integrates multiple deep architecture models optimized via a genetic algorithm to enhance bird species classification performance. Eight state-of-the-art deep learning models, namely ViT Transformer, EfficientNet, VGG16, VGG19, Xception, Inception, MobileNet and ResNet, were employed. Experiments were conducted using the Indian bird dataset. The genetic algorithm is employed to determine the best combining rule and select an ensemble of deep architectures with the highest fitness. The proposed ensemble method achieved a classification accuracy of 97% using a median-based ensemble of EfficientNetV2 and Vision (ViT) Transformer. The findings indicate that the proposed ensemble approach outperforms existing appearance-based bird species classification methods.
genetic algorithm, deep classifiers, performance enhancement, bird classification, probability score, ViT, EfficientNet, classifier ensemble
Advancements in the field of science and technology in recent years have motivated researchers and technocrats to consider addressing some of the very important and real-time tasks that have a significant impact on society and natural ecosystems. One such task is the classification of bird species in real-time environments. Birds can be classified based on their appearance and sound. Many ecologists and environmentalists who are quite familiar with birds can perform classification based on sound and appearance, but this is a challenging and cumbersome task when the number of species is more. Furthermore, intra-class variations and between-class similarities among the species pose many more challenges in accurately classifying bird species. In this context, in the past few decades, many attempts have been made to propose efficient and effective bird species classification techniques. A review of the literature reveals that there is scope to improve the classification accuracy and address many challenges, such as birds in complex backgrounds, occlusion, different poses, images with noise, and poor intensity. The capabilities of existing approaches can be effectively integrated to build a more robust and effective model that can work in real time and address the challenges mentioned above.
In view of this, an attempt was made to propose a genetic algorithm-based ensemble of deep architectures to enhance the performance of classification. The proposed ensemble approach explores the best deep models and best combining rules for integration. A database consisting of 41 bird species, each with more than 100 samples, was created to evaluate the performance of the proposed ensemble classification approach. A total of 6150 images were considered in our experimental analysis.
The remainder of this paper is organized as follows. Section 2 presents a review of recent literature. Section 3 presents the proposed methodology. Section 4 presents the details of the datasets used followed by conclusions and a few important references.
The key contributions of this work are listed as follows:
Several researchers have attempted to develop techniques for effective classification of bird species. A review of these key contributions is essential for identifying research gaps, addressing the limitations of existing systems, and proposing methodologies to enhance efficiency and effectiveness. In light of this, the following paragraphs summarize the significant works related to appearance-based bird species classification.
2.1 CNN and Vision Transformer (ViT)-based approaches
CNN and ViT-based approaches for bird species classification have been discussed. The following paragraphs present a brief description and critical analysis of these approaches.
Chen et al. [1] proposed a hierarchical gate network for fine-grained visual recognition. HGNet uses the interconnections among hierarchical classes. LSTM like mechanism is used to propagate dependencies among classes, which boosts classification accuracy. Experiments were conducted on datasets such as Stanford Dogs, CUB-200-2011, Aircraft, NABirds, iNaturalists, DeepFashion2 and DeepFashion. The proposed methodology achieved 88.7%, 88%, 92.8%, 86.4%, 78.2%, 58.5%, and 68.4% accuracy for the Stanford Dogs, CUB-200-2011, Aircraft, NABirds, iNaturalists, DeepFashion2 and DeepFashion datasets respectively.
Branson et al. [2] proposed a classification approach based on pose-normalized deep convolutional neural networks (DCNNs). The architecture estimates the pose of a bird to compute the local image features for classification. A graph-based clustering algorithm and higher-order geometric warping functions were used to estimate the normalized bird pose. Experiments conducted on the CUB-200-2011 dataset showed an accuracy of 75.7%.
Jaderberg et al. [3] proposed a spatial transformer network by introducing a learnable module that could be integrated into any CNN architecture with very little modification. When incorporated, this module equips the CNN with the ability to handle image transformations, such as translation, scaling, and rotation. The experiments conducted on the CUB-200-2011 dataset achieved a classification accuracy of 84.1%.
Manna et al. [4] proposed a various convolutional neural network, namely Inception V3, DenseNet 201, MobilenetV2, and Resenet152V2, for bird species classification based on images. The model was trained on 58388 images and tested on 2000 images belonging to 400 species. According to the study, ResNet152V2 achieved the highest accuracy of 95.45% and a loss of 0.8835. Similarly, DenseNet achieved a classification accuracy of 95.0% with a loss of 0.6845.
Zhang et al. [5] proposed a part-based CNN for fine-grained category detection to explicitly identify significant differences in the appearance of specific object parts. Semantic part localization was utilized for fine-grained categorization, with bounding box annotations considered during testing to address the object annotation challenges. The model leveraged convolutional features obtained through bottom-up region proposals, learning both whole-object detection and part detection while enforcing geometric constraints between the foreground and background of the interest. This approach enables fine-grained category detection using post normalized representations. Experiments on the CUB-200-2011 dataset demonstrate a performance of 76%.
Huang et al. [6] proposed a recognition of endemic birds using deep-learning models. A transfer learning-based method using Inception-ResNetV2 was used, which outperformed all the other methods, namely InceptionV3, ResNet101, MobileNetV2, Xception, and ResNet101. A five-fold cross-validation was used to review the results. A total of 790 images of birds consisting of 29 species were used to evaluate the performance of the model. The proposed model achieved accuracies of 100% for bird identification and 98.39% for bird classification.
Wei et al. [7] proposed a mask CNN without fully connected layers, which localizes parts and selects descriptors for fine-grained bird species categorization. The fully convolutional network locates discriminative parts and generates weighted object masks. A three-stem-masked CNN model was used to build the descriptors. The experiment was conducted on the CUB-200-2011 and Birdsnap datasets. The proposed model achieves 85.7% of accuracy for CUB-200-2011 dataset and 77.3% of accuracy for Birdsnap dataset, respectively.
Kumar and Kondaveeti [8] proposed a bird species recognition using a hybrid hyperparameter optimization scheme (HHOS). A few selected models were trained in the HHOS, which enhanced the classification performance. The results showed that EfficientNetB0 achieved superior performance compared to the other classification models, with the highest accuracy of 99.12%. The authors increased the size of the CUB-200-2011 dataset from 11788 to 40000 by adding 29,000 more images, which are the augmented versions of the original dataset.
Ngo et al. [9] proposed a survey of different deep-learning models such as InceptionV3 and EfficientNetB4. The model was evaluated on a wide range of datasets, including CUB -200-2011, Kaggle 325 bird species, and Kaggle-510 bird species, and a self-generated dataset (100 bird species from Malaysia) was used in this study. The EfficientNetB4 model outperformed the models in terms of classification performance. For the CUB-200-2011 dataset, the result was 74% for the EfficientNetB4 model.
Bold et al. [10] proposed a multiple kernel learning framework for bird species classification using a CNN was proposed. A multiple kernel learning technique was used to combine features from audio and video data. The CUB-200-2011 dataset and audio data were combined for classification. 78.15% was the highest performance achieved using the proposed methodology.
Discriminative features for bird species classification were proposed by Pang et al. [11]. First, the images were cropped based on patches. The patches are used to form codebooks, and finally, the code books are used to generate intermediate features based on the sparse coding algorithm. Intermediate features were concatenated to form the final feature representation, which was used for training and classification. The CUB-200-2011 dataset was used in this study. The proposed model has achieved 64.6% of performance.
CNN works best in processing spartial patterns while ViT works best in processing global context and long-range dependencies. Limitations of the ViT are high computational cost, low inductive bias and needs huge data. Whereas limitations of the CNN are high inductive bias, lower computational cost and weak in handling global context.
CNN-based models utilize convolutional kernels that have a local receptive field, meaning they process only a small window of pixels at a time. While stacking multiple layers allows the network to eventually see the entire image, its global understanding remains inefficient and implicit. This limitation can be addressed by transformer-based methods, which use a self-attention mechanism for a more holistic view. However, transformer models are extremely dependent on large amounts of data and require high computational power. Consequently, the choice between a CNN and a ViT involves a trade-off: CNNs offer greater efficiency and lower computational demands, while ViTs deliver higher performance and superior holistic modelling—requires adequate data and significant computational resources as shown in Table 1.
Table 1. Literature review for CNN and ViT based approaches
|
Refs. |
Architecture |
Dataset |
Accuracy |
Analysis |
Limitation |
|
[1] |
Hierarchical gate network for fine-grained visual recognition |
Stanford Dogs, CUB-200-2011, Aircraft NABirds, and iNaturalists. DeepFashion2 and DeepFashion. |
88.7%, 88%, 92.8%, 86.4%, 78.2%, 58.5%, and 68.4% accuracy for the Stanford Dogs, CUB-200-2011, Aircraft NABirds, iNaturalists, DeepFashion2, and DeepFashion datasets, respectively. |
Interconnection among hierarchical classes and LSTM is used to propagate dependencies. |
The ViT-based approaches are computationally expensive, low inductive bias and needs huge data. Whereas the CNN based approaches are having high inductive bias and weak in handling global context. |
|
[2] |
Classification approach based on pose-normalized DCNNs |
CUB-200-2011 |
75.7% |
With DCNN, graph-based clustering algorithm and higher-order geometric warping functions were used to estimate the normalized bird pose. |
|
|
[3] |
Spatial transformer networks |
CUB-200-2011 |
84.1% |
A learnable mod named spatial transformer is used to handle image transformation, scaling and rotation. |
|
|
[4] |
Bird image classification using convolutional neural network transfer learning architectures |
The model was trained on 58388 images and tested on 2000 images belonging to 400 species (own dataset). |
ResNet152V2 achieved the highest accuracy of 95.45% and a loss of 0.8835. Similarly, DenseNet achieved a classification accuracy of 95.0% with a loss of 0.6845. |
Various deep learning architectures are compared. |
|
|
[5] |
Part-based R-CNNs for fine-grained category detection |
CUB-200-2011 |
76% |
The model leveraged convolutional features obtained through bottom-up region proposals, learning both whole-object detection and part detection while enforcing geometric constraints between the foreground and background of the interest. |
|
|
[6] |
Recognition of endemic bird species using deep learning models |
Own dataset |
100% for bird identification and 98.39% for bird classification. |
Various deep learning model performance is compared. |
|
|
[7] |
Bird species recognition using transfer learning with a hybrid hyperparameter optimization scheme (HHOS) |
CUB-200-2011 |
The model achieved highest accuracy of 99.12%. The authors increased the size of the CUB-200-2011 dataset from 11788 to 40000 by adding 29,000 more images, which are the augmented versions of the original dataset. |
Augmentation is used to build more robust models. |
|
|
[8] |
Bird species identification using deep learning on GPU platform |
CUB-200-2011 |
Google Net was used for this purpose, which performed with 88% classification accuracy. |
Deep learning model named GooLeNet was used in this purpose which proves that any deep learning models can be used. |
|
|
[9] |
Mask-CNN: Localizing parts and selecting descriptors for fine-grained image recognition |
CUB-200-2011 and Birdsnap datasets |
85% of accuracy for CUB-200-2011 dataset and 77.3% of accuracy for Birdsnap dataset, respectively. |
This study proves that EfficientNet model is the best model for bird species classification. |
|
|
[10] |
Bird species recognition system with fine-tuned model |
CUB-200-2011 |
74% |
Fusion of audio and video enhances classification performance. |
|
|
[11] |
Bird species classification with audio-visual data using CNN and multiple kernel learning |
CUB-200-2011 |
78.15% |
Images were cropped based on patches. The patches are used to form codebooks, and finally, the code books are used to generate intermediate features based on the sparse coding algorithm. |
2.2 Genetic algorithm-based approaches
Genetic algorithm-based approaches for bird species classification were discussed in studies [12, 13]. The following paragraphs presents a brief description and critical analysis about these approaches.
Mousavi and Eftekhari [12] proposed a technique for image classification based on hybridization of classifier ensemble approaches. The model was evaluated using both static and dynamic ensemble methodologies, leveraging NSGA-II as a multi-objective genetic algorithm to optimize both error and diversity for selecting the best classifier ensemble. A Pareto optimal solution is suggested to balance the trade-off between these objectives. The experiments were conducted using six combined rules and 46 individual classifiers. The proposed approach outperformed all other ensemble methods across the 14 datasets in terms of classification accuracy.
Dharmawan et al. [13] proposed a novel waste classification approach that incorporates genetic algorithm hyperparameter optimization with data augmentation and data down sampling. To obtain the best hyperparameter configuration, multiple scenarios were tested with augmentation and different image dimensions. This configuration enhances the accuracy from 94% to 97%.
Advantages of genetic algorithm are it supports global optimization, handles nondifferentiable and complex problems, it is flexible and versatile, it provides a set of good solutions, it is intuitive and inspired by nature.
Limitations of the Genetic algorithm-based approaches are, computationally expensive for training model at each iteration, no guarantee of optimality, problem specific parameter tuning, premature convergence and not suited for all kinds of solutions as shown in Table 2.
Table 2. Literature review of genetic algorithm-based approaches
|
References |
Architecture |
Dataset |
Accuracy |
Analysis |
Limitation |
|
[12] |
A new ensemble learning methodology based on hybridization of classifier ensemble selection approaches. |
14 datasets |
Best performing chromosome was achieved |
Ensemble learning based genetic algorithm estimates the best performing chromosome based on trade-off between accuracy and diversity. |
Limitations of the genetic algorithm-based approaches are computationally expensive for training model at each iteration, no guarantee of optimality, problem specific parameter tuning, premature convergence and not suited for all kinds of solutions. |
|
[13] |
Optimizing DenseNet121 for waste classification using genetic algorithm-based down sampling and data augmentation. |
Own dataset |
97% |
To obtain the best hyperparameter configuration, multiple scenarios were tested with augmentation and different image dimensions. |
2.3 Machine learning based approaches
Machine learning-based approaches for bird species classification are discussed in studies [14-19]. The following paragraphs presents a brief description and critical analysis about these approaches.
Kong and Fowlkes [14] proposed a low-rank bilinear pooling method for fine-grained classification. The study revealed that a high-dimensional bilinear feature vector, created by pooling the results of second-order local feature statistics, outperformed contemporary methods across various fine-grained bird classification tasks. To address the complexity of high-dimensional feature spaces, this study proposes covariance features and applies them to a low-rank bilinear classifier. The model was further compressed using a classifier co-decomposition approach, where a collection of bilinear classifiers was factorized into a common factor and compact per class terms. This co-decomposition was implemented using two convolutional layers and was trained in an end-to-end architecture. Additionally, an effective initialization strategy was suggested to avoid the explicit training and factorization of larger bilinear classifiers. Several experiments were conducted on various public datasets to evaluate the efficacy of the proposed methodology, and the results demonstrated a superior performance. The experiment conducted on the CUB-200-2011 dataset achieved the highest accuracy of 84.21%.
Rai et al. [15] proposed various machine learning techniques for bird species classification were proposed. In this study, a CNN model was used for feature extraction, whereas Naive Bayes, SVM, Random Forest, LDA, Decision Tree, KNN, and Logistic Regression were employed for classification. Trail experiments were conducted on the CUB-200-2011 dataset, and it was reported that the KNN classifier achieved the highest classification accuracy of 33%. These studies highlight the progress made in appearance-based bird species classification and underscore the need for further improvements, particularly in handling complex pose variations and enhancing classification accuracy in real-world settings.
Yang et al. [16] proposed an improved transfer learning methodology for the classification of protected Indonesian birds based on images. In this study, batch normalization dropout fully connected (BNDFC) layers were proposed, which can be incorporated into any CNN network to further enhance classification accuracy. This study was conducted using an Indonesian bird dataset. The experiment was conducted using MobilenetV2 CNN and on average, the performance was enhanced by 19.88% accuracy, 24.43% F-measure, 17.93 G-mean, 23.41 of sensitivity, and 18.76 of precision. The highest accuracy achieved was 88.07% for the validation set.
Naranchimeg et al. [17] proposed a multi-model bird species classification for using audio-visual data. CUB-200-2011 was used to build the visual data module, and originally collected audio data were used for building the audio module. The overall classification performance was enhanced by combining audio and video data using a CNN. The model achieved a classification accuracy of 78.9%.
Yang et al. [18] proposed an automatic bird image classification with feature enhancement and contrastive learning. The proposed methodology includes multiscale feature fusion to extract information at different scales. An attention feature enhancement module was integrated to address occlusion and noise. Furthermore, the Siamese network was used to compare two images belonging to the same class and different classes. CUB-200-2011 dataset was used in the study. With only 5% of the training data, the model performed fairly well, with a recognition accuracy of 65.2%. Limitations of the machine learning based approaches, depends mainly on feature engineering, struggles with unstructured data, curse of dimensionality and sensitive to data scaling as shown in Table 3.
Table 3. Literature review of machine learning based approaches
|
References |
Architecture |
Dataset |
Accuracy |
Analysis |
Limitation |
|
[14] |
Low-rank bilinear pooling for fine-grained classification |
CUB-200-2011 |
84.21% |
A high-dimensional bilinear feature vector, created by pooling the results of second-order local feature statistics, outperformed contemporary methods across various fine-grained bird classification tasks. To address the complexity of high-dimensional feature spaces, this study proposes covariance features and applies them to a low-rank bilinear classifier. |
Machine learning approaches depends mainly on feature engineering, struggles with unstructured data, curse of dimensionality and sensitive to data scaling. |
|
[15] |
Analysis of learning techniques: bird species classification |
CUB-200-2011 |
33% |
Various classifiers were studied for the purpose of bird species classification. |
|
|
[16] |
An improved transfer-learning for image-based species classification of protected Indonesians birds |
Own dataset |
88.07% |
batch normalization dropout fully connected (BNDFC) layers were proposed which can be incorporated in any CNN. |
|
|
[17] |
Cross-domain deep feature combination for bird species classification with audio-visual data |
CUB-200-2011 |
78.9% |
Multi model bird species classification was proposed which enhances the overall classification accuracy. |
|
|
[18] |
Automatic bird species recognition from images with feature enhancement and contrastive learning |
CUB-200-2011 |
65.2% |
multiscale feature fusion to extract information at different scales. An attention feature enhancement module was integrated to address occlusion and noise. Furthermore, the Siamese network was used to compare two images belonging to the same class and different classes. |
2.4 Optimization based approaches
Optimization-based approaches for classification were discussed in studies [19, 20]. The following paragraphs presents a brief description and critical analysis about these approaches.
Kittler et al. [19] proposed a theoretical framework was for combining multiple classifiers using various combinations of rules to improve pattern classification performance. Each classifier utilizes a unique pattern representation technique to make decisions. Four decision classifiers such as structural, Gaussian, neural network, and hidden Markov model were studied. Accuracy of the proposed classifier ensemble was evaluated through handwritten digit classification, which achieved a classification accuracy of 98.19% with the median combining rule. The approach is computational expensive and suffers from the risk of overfitting and noise sensitivity.
Kumar and Kondaveeti [20] proposed an explainable artificial intelligence to increase the clarity of a deep learning model for bird species classification. Popular deep learning models such as EfficientNetB0, DarkNet53, DenseNet201 SqueezeNet, InceptionResNetV2 and NasNetLarge were trained using CUB-200-2011. The authors have claimed a highest accuracy of 99.51% for EfficientNetB0.
Explanations given by XAI are approximations and incomplete as the single statement rarely tells the complete story. As explanations are filtered through cognitive biases, Explainable models are less accurate, creates false sense of trust and hard to audit, as shown in Table 4.
Table 4. Literature review of other optimization-based techniques
|
References |
Architecture |
Dataset |
Accuracy |
Analysis |
Limitation |
|
[19] |
On combining classifiers |
Handwritten digit classification dataset |
98.19% |
This work is very useful in introducing combining rules for combination. |
High computational cost, risk of overfitting and sensitive to noise. |
|
[20] |
Towards transparency in AI: Explainable bird species image classification for ecological research |
CUB-200-2011 |
EfficientNetB0 has achieved an accuracy of 80.421% on CUB-200-2011 dataset. |
This work helps in introducing explainable AI in the field of bird species classification. |
XAI is incomplete as the single statement rarely tells the complete story. As explanations are filtered through cognitive biases, Explainable models are less accurate, creates false sense of trust and hard to audit. |
In the present study optimal chromosome has been achieved which outperforms all the individual classifiers. It’s the best combination of the available classifiers, which has enhanced the classification performance. The classifiers have not overfitted because of the availability of the validation split. Genetic algorithm has been best suited in the present scenario.
The ensemble model using genetic algorithm does not overcome the individual limitations, instead it enhances the overall performance of the ensemble.
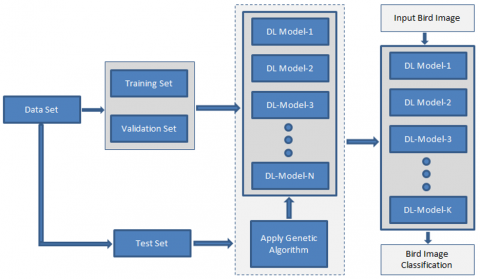
The methodology proposed in this study aims to identify a deep architecture combination that can improve the accuracy of classifying an unknown bird image into one of the known classes as per the training. The concept of a genetic algorithm was explored to identify the best deep architecture combination. The steps involved in the proposed methodology are depicted in Figure 1 and described in the following paragraphs.
Figure 1. Architecture of the proposed genetic algorithm-based ensemble of deep learning models for appearance-based bird classification
Initially, the methodology begins by splitting the images of the benchmark dataset into training, validation, and testing portions. The images in the training set were used to train the deep learning models, and those in the validation set were used to fine-tune the trained models. Once the deep models are trained with the required number of iterations and are found to perform better in terms of classification accuracy, the training process is stopped. The classification ability of the trained individual deep learning model was tested using images in the test set, and its performance was recorded. It was observed that the models showed good performance for some classes and poor performance for some other classes. It has also been observed that the model that has shown good classification performance for one class does not show such good performance for some other classes. Hence, it is evident that no single model can provide an overall good classification accuracy for the considered dataset. Therefore, it is thought that ensembling the models and taking the collective decision enhance the accuracy of classification. However, to optimize the classifier combination, it is suggested to explore the concept of a genetic algorithm that produces the best overall classification accuracy for the considered dataset.
The following paragraphs present a brief description of the various deep learning models used in the proposed research work and the details of the selection of the best combination through a genetic algorithm-based approach.
3.1 The deep learning model’s overview
Several deep CNN and transformer-based models have been proposed for various machine learning tasks, such as segmentation, classification, and prediction. All these models vary in architecture but have certain common features. The 1st layer in the deep architecture is the input layer, which accepts the image data, followed by a convolution layer, which is responsible for extracting meaningful features by performing convolutional operations. The subsequent layers, also called hidden layers, perform different convolution operations and derive a high-level abstraction from the input image. The number of hidden layers depends on the architecture that is designed to solve a particular problem. The final layer of the deep architecture was a fully connected layer that produced a complete set of features extracted from the image for characterization. The RELU activation function was used in all layers except the final layer, and the Softmax activation function was used in the final layer for classification.
Xception: A CNN architecture that depends completely on depth-wise separable convolution layers [21]. This is an extension of the inception model, where the inception modules are substituted with depth wise separable convolution layers. The Xception model is organized into three blocks, namely, the entry, middle, and exit flows with skip connections around the thirty-six layers. The entry flow extracts low-level features from the input image, the middle flow progressively extracts higher-level features from the image, and the exit flow refines these features for final predictions. This hierarchical structure aids in learning hierarchical representations and in the flow of data through the network.
VGG16: Deep CNN model used for image classification tasks [22]. The network was composed of 16 layers of artificial neurons, which were responsible for incrementally processing image information and enhancing the accuracy of its predictions. VGG16 uses convolution layers with a 3 × 3 filter and stride 1 that are in the same padding and max pool layer of a 2 × 2 filter of stride 2. It follows this arrangement of convolution and max pool layers consistently throughout the architecture. It had two fully connected layers at the end, followed by a Softmax activation function for the output.
VGG19: A variant of the VGG model, which consists of 19 layers, is characterized by its simplicity and uniform architecture [22]. The network is composed of a series of convolutional layers, followed by max-pooling layers, and several fully connected layers at the end. The use of small 3 × 3 convolutional filters throughout the network allows for a deeper architecture, while maintaining a relatively low number of parameters. A rectified linear unit (ReLu) was used to introduce nonlinearity and improve the computational time and classification ability of the model.
ResNet-152: A convolutional neural network that exploits the concepts of residual learning to dampen the degradation of deep neural networks and skip connections [23], which adds new inputs to the network and generates new outputs. This idea enables the model to be trained more deeply and achieve better classification accuracy without increasing the complexity of the model. ResNet-152 is proved to be the best model in terms of its classification accuracy among the ResNet family members and hence it is considered in this study.
MobileNet: Simple but lightweight and efficient convolutional neural network model for mobile vision applications [24]. MobileNet is widely used in many applications including object detection, fine-grained classification, semantic segmentation, and localization. The MobileNet model replaces depth wise convolutions in the place of standard convolutions to build a very lighter model with very less parameters when compared with other networks to come up with lightweight deep CNN. MobileNets introduced two new global hyperparameters, the width multiplier and resolution multiplier, that allow model developers to trade off latency or accuracy for speed and low size depending on their requirements.
InceptionNet: A convolutional neural network designed for image-classification tasks [25]. The inception architecture combines convolutional filters of different sizes in parallel to extract features from the input image at different scales. The output of each filter is then concatenated and sent to the next layer, where the process is done multiple times. This approach allows the network to capture local and global features of the input image while minimizing the number of parameters. The inception modules allow the network to learn temporal and spatial features from the input data because the module is composed of pooling and small convolutional layers. The aim was to make the model more efficient and faster. It has been widely used in various applications such as object detection, face recognition, and image classification.
EfficientNetV2: A type of convolutional neural network that can be trained faster and has better parameter efficiency than previous models [26]. Both parameter efficiency and training speed were jointly optimized using a neural architecture search (NAS). Although EfficientNetV2 is smaller, it still outperforms the state-of-the-art method by enriching the search space with newer operations, such as fused-MBConv.
ViT: A transformer-based logic derived from NLP is applied in the field of computer vision. By inserting a new multi-layer perceptron was used as the head of the encoder, a ViT was used to classify birds based on the images. Training the ViT on large datasets produces better results than the CNN-based architecture in the field of image classification.
3.2 Ensemble of deep learning models using genetic algorithm
Genetic algorithm is an optimization and search technique used to find the best ensemble of deep learning classifiers in the field of image classification. The optimization model reduces the search space to determine the most optimal architecture with the highest fitness. The genetic algorithm is based on evolution and natural selection, which is inspired by the field of biology and incorporates the knowledge of survival of the fittest to return the chromosome with the highest performance.
From a literature survey, it can be inferred that the ensemble learning system has achieved significant improvement in classification accuracy, and many ensemble learning techniques have also been introduced by Mousavi and Eftekhari [12]. It is well known that the concept of genetic algorithms has also been explored to determine the most optimal solution. Based on this observation, the deep learning models presented in the previous section were assembled using a genetic algorithm. Different combining rules, as shown in Table 5, were used for ensembling.
Table 5. Combining rules and the procedure for ensembling deep learning models
|
Sl |
Combining |
Description |
Procedure |
Encoding |
|
1 |
Majority |
Majority |
Class Title |
000 |
|
2 |
Maximum |
Maximum rule |
Supporting |
001 |
|
3 |
Minimum |
Minimum rule |
Supporting |
010 |
|
4 |
Mean |
Mean rule |
Supporting |
011 |
|
5 |
Median |
Median |
Supporting |
100 |
|
6 |
Product |
Product rule |
Supporting |
101 |
Table 5 presents six different combining rules, and the corresponding procedures used to ensemble the deep architecture models. For a given sample, the class-wise probabilities obtained by the individual learning models were combined based on the combining rule, and the final decision for classification was made accordingly. Table 6 presents the various deep architectures used in the proposed methodology for ensembling, and their corresponding bits in the chromosome.
Table 6. Deep architectures used in the experiment and their encoding bits on the chromosome
|
Deep |
Encoding |
|
Xception |
1 |
|
Inception |
2 |
|
MobileNetV2 |
3 |
|
ResNet152 |
4 |
|
VGG19 |
5 |
|
VGG16 |
6 |
|
EfficientNetV2 |
7 |
|
ViT |
8 |
3.3 Representation of a chromosome
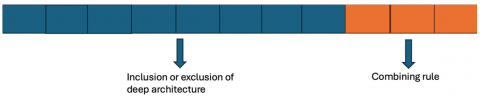
The concept of genetic algorithm is based on the representation of chromosomes. In the present study, a chromosome is a pattern of bits that represents a list of deep architectures and their combination rules. A chromosome was defined with 11 binary bits, where the first 3 bits are used to define combining rules and remaining 8 bits are used for inclusion or exclusion of 8 different deep classifiers considered in this work. The six different combining rules mentioned in Table 1 can be uniquely identified by 3 bits. Figure 2 shows the structure of the chromosomes.
Figure 2. Diagram representing the structure of a chromosome
3.4 Selection of best deep model ensemble
The concept of a genetic algorithm is used to identify the best combination of deep models to improve classification accuracy. According to the structure of the chromosome mentioned above, if the brute-force method is used to find the optimal chromosome structure, then the algorithm should compute all 1536 (28 × 6) possible combinations for eight different deep models and six different combining rules. However, the proposed genetic algorithm performs only 300 possible combinations and reduces overall complexity. In the proposed genetic algorithm, classification accuracy is used as the fitness metric, as mentioned in Algorithm 1.
|
Algorithm 1: Selection of Best Deep model Ensemble |
|
Input: (i) population size: S (ii) point of crossover ‘p1’, mutation rate ‘p2’, structure of the chromosome, fitness metric, number of generations ’N’. Output: Best performing chromosome Method:
Loop end:
|
In prior ensemble methods, crossover and mutation operations are performed in sequence (mutation followed by crossover), but in the proposed work these operations are performed in parallel. By applying mutation and crossover operators in parallel, the genetic algorithm searches the local optima (solutions with lower hamming distance) using lower mutation rate and searches the wider search space with the crossover operator. But in the prior work, mutation followed by crossover searches for diverse solutions (solutions with higher hamming distance).
3.4.1 Binary tournament selection
Binary tournament selection is a methodology used in the genetic algorithm for the purpose of selecting individuals based on their fitness. Two chromosomes were randomly selected from the population, and the accuracy of both chromosomes was estimated based on the combined rule and selected deep classifiers. The computed accuracy of classification was assigned as the fitness of the chromosomes, the fitness of both individuals was compared, and chromosomes with the highest fitness were returned as the output of the binary tournament selection in Algorithm 2.
|
Algorithm 2: Binary Tournament Selection |
|
Input: Randomly selected two chromosomes from the population ‘P’ Output: Chromosome with the higher fitness Method:
|
3.4.2 Crossover
Crossover is a genetic operation used to combine genetic information to produce new offsprings as shown in Algorithm 3. Two chromosomes selected using the tournament selection technique were subjected to recombination. In the present experiment, a one-point crossover was used to estimate the recombination where all the genes were exchanged to produce new offspring after the crossover point. Example: Let Chromosome A Chromosome B = 11111111111; if the point of crossover is the 3rd bit, then the newly generated offspring are A = 111111111 and B = 11000000000. Here, all the genes after the reference point are exchanged.
|
Algorithm 3: Crossover |
|
Input: Population, chromosome size ‘N’ Output: Output architecture of the two chromosomes Method:
|
3.4.3 Mutation
Mutation is a genetic operator used to produce offspring by altering the chromosomes. A chromosome selected using the tournament selection technique was subjected to mutations. In this experiment, bits of the chromosome were flipped based on the mutation rate. While processing a chromosome, each bit is compared with the value generated by a random function in the interval [0,1]. If the function generates a value less than the mutation rate, then the bit is flipped. Thus, by flipping the bits in the chromosomes, the mutation enabled us to find a better chromosome as presented in Algorithm 4. The higher the mutation rate, the higher is the chance of flipping the bits. Hence, the mutation rate is directly related to Hamming distance between chromosomes before and after the mutation application.
|
Algorithm 4: Mutation |
|
Input: Input chromosome ‘C’, mutation rate ‘P’, chromosome size ‘N’ Output: Output Chromosome Method:
|
3.4.4 Production of new generation
During the execution of the genetic, the new generation replaces the old generation based on the fitness values of the chromosomes. If the population size is ‘N,’ the population size doubles when new offspring are generated and added to the present population in Algorithm 5. To pass the chromosomes to a newer generation, all the chromosomes are first ranked based on fitness; further, the top N chromosomes are considered as the newer population, as the evolution methodology is based on the survival of the fittest.
|
Algorithm 5: Production of New Generation |
|
Input: Population of the present generation P = $\left\{p_1, p_2, p_{3 \ldots} p_m\right\}$ Output: Population of the next generation if size ‘N’,$P_i=\left\{p_1, p_2, p_{3 \ldots} p_n\right\}$ where n < m Method:
|
During the workflow of the genetic, whenever new chromosomes are generated or modified, they are added to the chromosome bank. This repository helps to observe all chromosomes that were searched by the genetic algorithm. This bank is very helpful in displaying the top 10 chromosomes.
3.4.5 Dealing with erroneous chromosomes
During the execution of each step of the genetic algorithm, there is a chance of generating an erroneous chromosome. As there are 3 bits allotted for the encoding of the combining rules, the three bits can generate eight possible combinations, where there are only six combining rules. The remaining two possible combinations are erroneous because they do not represent any combining rules. Furthermore, during crossover and mutation operations, an erroneous chromosome may be generated. To address such situations, exception handling is necessary.
As per the principles of genetic algorithm, whenever offsprings are generated by crossover or mutation, they are added to the existing population. If n1 is the population size and n2 is the number of chromosomes generated by crossover or mutation operations, then the total number of chromosomes to be processed becomes (n3 = n1 + n2). However, before passing all these chromosomes to the next generation, the chromosomes are sorted, and the top n << n3 chromosomes are passed to the next generation.
4.1 Dataset
The Indian bird image dataset was used to conduct experiments and corroborate the performance of the proposed methodology for classifying bird species. The dataset comprises 6150 images splitted into 41 categories, each of which has approximately 150 images. The dataset contained non-segmented bird images. There were significant intra-class variations in the dataset as a single bird was captured at different angles and poses. The dataset is quite complex when compared to available datasets, as the birds are captured with complex backgrounds, bird images are occluded with other objects, and the birds are captured in different poses and angles.
4.2 Experimental setup
Several experiments were conducted to study the performance of the proposed methodology and fine-tune the parameters to enhance the classification accuracy and robustness of the classification approach. Segmented and non-segmented images were studied to understand the performance of the proposed methodology. The following subsections provide details of the parameters used for training the model.
4.2.1 Parameters used for training deep learning models
All the bird images (Figure 3) are resized to size of (224,224,3). A batch size of 32 was used in the experiment. ‘Include top’ parameter was set as False, as the fully connected layers were not included. Stochastic gradient descent (SGD) was used as the optimizer of the model. Accuracy was used as the metric for the optimization of the model. The SGD learning rate was initialized as 0.001, the SGD decay as 1e-6, and the SGD momentum as 0.9. The callbacks of the model were declared with ‘Restore best weights’ as TRUE and with a patience of 5. The loss was categorized as categorical_crossentropy, as it was a multiclass classification problem.
Figure 3. Examples of images from the Indian bird dataset
4.2.2 Results on different ratios of training and testing data
Several experiments were conducted to study the classification accuracy of the proposed methodology by considering the parameters considered in the previous sections.
Table 7 presents the outcomes of the experiments conducted with different percentages of training and testing for bird images.
Table 7. Classification results for Indian bird images
|
Training/Testing |
Train-90% |
Train-80% |
Train-70% |
|
vs |
val-5% |
val-10% |
val-15% |
|
DL Models |
Test-5% |
Test-10% |
Test-15% |
|
Xception |
89% |
87% |
86% |
|
ResNet 152 |
84% |
82% |
83% |
|
MobileNet |
79% |
80% |
80% |
|
Inception |
84% |
80% |
78% |
|
EfficientNetV2 |
91% |
90% |
86% |
4.2.3 Parameters used in genetic algorithm
Some parameters associated with the genetic algorithm proposed in this study need to be initialized and fine-tuned during its execution. New chromosomes are generated in each iteration by performing genetic operations, such as mutation and crossover. It has been observed that new chromosomes generated in this manner will be stable after 10 generations. Therefore, the maximum number of iterations required to produce stable chromosomes in this experiment was 10. Thus, the search space computation using a genetic algorithm is equal to the product of the number of generations and population size (10 × 30). As 1536 > 300, the search space for the selection of the best classifier ensemble is reduced using a genetic algorithm when compared with the brute force technique.
The population size should be as large as possible so that a larger diversity of chromosomes can be considered in the experiment. The population size should be as small as possible so that the product of the number of generations and population size is smaller than the computations done by the brute force technique. Hence, the population size is a trade-off between these two conditions. In the experiment, the population size was empirically chosen as 30, as it optimizes the trade-off criteria. The point of crossover is chosen as 1, as it is the standard value used in most genetic algorithm implementations.
The mutation rate should be as large as possible so that diverse solutions are explored with fewer generations. The mutation rate should be chosen as small as possible so that solutions with local optima can be explored. Hence, the mutation rate is empirically chosen as 0.5, as it optimizes the trade-off criteria. Table 8 lists the parameters used in the experiments.
Table 8. Parameters used in the experiments
|
Parameters |
Values in the Experiment |
|
Population size |
30 |
|
Point of crossover |
1 |
|
Mutation rate |
0.5 |
|
Fitness metric |
Accuracy of classification |
|
Number of generations is decided by observing no change in the population elements consistently for x generations |
x = 4 |
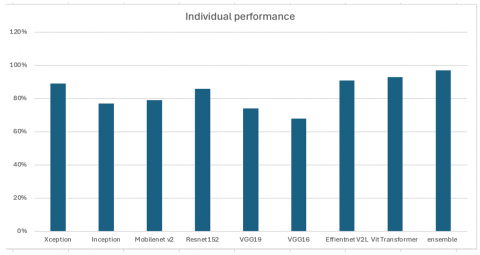
The parameters used in the genetic algorithm are initialized as mentioned in Table 8. The performance of the individual deep architectures and their ensemble was observed and is presented in Table 9. It can be observed from the results presented in Table 9 that the ensemble of classifiers using the proposed genetic algorithm has enhanced the accuracy of the classification by selectively choosing the right combination of deep classifiers and the right combining rule. Although it is possible to come up with the right combination of deep classifiers with brute force methodology, it is a very cumbersome task, and the complexity of such a technique is quite high. Time complexity can be drastically reduced by applying a genetic algorithm, as discussed.
Table 9. Performance of individual deep architecture classifiers and their ensembles
|
Deep Architectures |
Individual Performance |
Performance of Classifier Ensemble |
|
Xception |
89% |
97% |
|
Inception |
77% |
|
|
MobileNet |
79% |
|
|
ResNet152 |
86% |
|
|
VGG19 |
74% |
|
|
VGG16 |
68% |
|
|
EfficientNet |
91% |
|
|
ViT |
93% |
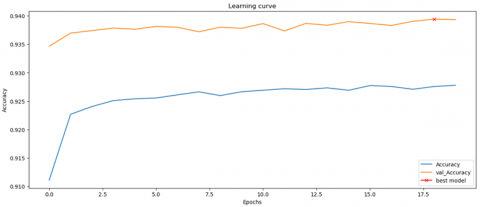
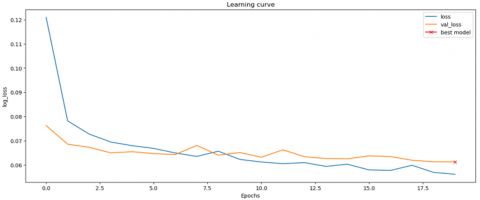
Figure 4 represents performance of individual deep architecture classifier and their ensembles. Figure 5 represents graph depicting training accuracy and validation accuracy. Figure 6 represents graph depicting training loss and validation loss. Based on Figures 5 and 6, it is easy to analyze that the model is not overfitting and not lacking generatability.
Figure 4. Accuracies of individual and ensemble techniques
Figure 5. Graph plotted between accuracy and epochs
Figure 6. Graph plotted between loss and epochs
4.3 Analysis of fit chromosome
In this context, the fitness of any chromosome is measured in terms of its classification performance by combining the different deep architectures considered for the analysis and the combining rule. The best combination of the deep classifier ensemble and the best combining rules were analysed by conducting experiments and fine-tuning the parameters of the genetic algorithm. Experimental results revealed that the combination of an EfficientNetV2L and ViT with a median combining rule produced the highest accuracy of 97%. The details are presented in Table 10.
Table 10. Best performing chromosomes in terms of the fitness of the genetic algorithm
|
|
Encoded String |
Combining Rule |
Deep Architectures Included |
|
First best chromosome |
'00000011100' |
Median |
EfficientNetV2L ViT |
From the experiments, the best performing top 10 chromosomes were observed and are presented in Table 11. The structure of each chromosome indicates the presence (1) or absence (0) of a particular deep learning model and the combining rules for ensembling. For example, chromosome 10000011101 indicates that the deep learning models considered for ensembling are Xception, EfficientNet and ViT as mentioned in Table 6 and the ‘product’ combining rule as described in Table 5. From Table 11, it can be observed that all the top 10 chromosomes have 7th and 8th bit as one, which indicates that the combination of EfficientNetV2L and ViT has shown a better classification accuracy of 97% when compared to other combinations.
Table 11. Best performing top 10 chromosomes for Indian bird dataset
|
Chromosome |
Accuracy |
|
'00000011100' |
0.9657 |
|
'00000011011 |
0.9657 |
|
'00000111011 |
0.9657 |
|
'00000001100 |
0.96261682 |
|
'00000001011' |
0.96261682 |
|
'00000001010 |
0.96261682 |
|
'00001111011 |
0.96261682 |
|
'01000011011 |
0.95950156 |
|
'00000011001 |
0.95950156 |
|
'00100011011' |
0.95950156 |
The top chromosomes work better because they have the highest fitness. The researcher does not have any control over the output of the genetic algorithm, and the genetic algorithm decides the output.
The pattern of the best-performing chromosome states that the combination of ViT and Efficient with Median combining rule is most suited for bird species classification.
Individually, ViT and EfficientNetV2 performed very well. Hence, any combination of these two models performs better. Table 11 presents all the top 10 chromosomes, where all the chromosomes have ViT and EfficientNet.
The performance of the proposed ensemble classification approach was also studied by conducting several experiments and computing class-wise precision, recall, and F-measures, and the results are presented in Table 12. From the results, it was observed that for most of the classes, the results were good, with high precision, recall, and F-measure. However, for a few classes, the results must be improved. One of the reasons for low precision, recall, and F-measure for some of the classes is that the samples for those classes are insufficient, and many more samples with significant intraclass variations need to be considered for training the model. Such an analysis will be conducted in future work.
Species such as Swifts, Prinias, Robins, Plovers, Pigeons, Munias, Nightjars, Flycatchers, Cuckoos, and Doves performed very poorly, with low F1 scores.
Table 12. Class-wise precision, recall and F1-score obtained for the Indian bird dataset using the best classifier ensemble for 90% training, 5% validation, and 5% testing
|
Bird Class |
Precision |
Recall |
F1-Score |
Support |
|
Babblers |
1 |
1 |
1 |
8 |
|
Barbets |
1 |
1 |
1 |
8 |
|
Bulbuls |
1 |
1 |
1 |
7 |
|
Coots |
1 |
1 |
1 |
8 |
|
Cranes |
1 |
1 |
1 |
6 |
|
Cuckoos |
1 |
0.88 |
0.93 |
8 |
|
Doves |
1 |
0.88 |
0.93 |
7 |
|
Drongos |
0.89 |
1 |
0.94 |
8 |
|
Ducks |
1 |
1 |
1 |
8 |
|
Eagles |
1 |
1 |
1 |
8 |
|
Egrets |
0.89 |
1 |
0.94 |
8 |
|
Falcons |
1 |
1 |
1 |
8 |
|
Finches |
1 |
1 |
1 |
8 |
|
Flycatchers |
0.88 |
0.88 |
0.88 |
8 |
|
Herons |
1 |
0.88 |
0.93 |
7 |
|
Hornbills |
1 |
1 |
1 |
8 |
|
Jacanas |
0.88 |
0.88 |
0.88 |
8 |
|
Kingfishers |
1 |
1 |
1 |
8 |
|
Munias |
0.89 |
1 |
0.94 |
7 |
|
Nightjars |
1 |
0.88 |
0.93 |
8 |
|
Orioles |
1 |
1 |
1 |
6 |
|
Owls |
1 |
1 |
1 |
8 |
|
Parakeets |
1 |
1 |
1 |
6 |
|
Peafowl |
1 |
1 |
1 |
8 |
|
Pheasants |
1 |
1 |
1 |
8 |
|
Pigeons |
0.89 |
1 |
0.94 |
7 |
|
Plovers |
0.89 |
1 |
0.94 |
8 |
|
Prinias |
0.88 |
0.88 |
0.88 |
8 |
|
Robins |
0.89 |
1 |
0.94 |
8 |
|
Sandpipers |
1 |
1 |
1 |
8 |
|
Shrikes |
1 |
0.88 |
0.93 |
8 |
|
Storks |
1 |
0.88 |
0.93 |
8 |
|
Sunbirds |
1 |
1 |
1 |
8 |
|
Swallows |
1 |
0.75 |
0.86 |
8 |
|
Swamphens |
1 |
1 |
1 |
8 |
|
Swifts |
0.75 |
1 |
0.86 |
3 |
|
Terns |
1 |
1 |
1 |
7 |
|
Wagtails |
1 |
1 |
1 |
8 |
|
Warblers |
1 |
1 |
1 |
8 |
|
Woodpeckers |
1 |
1 |
1 |
8 |
A novel deep architecture ensemble using a genetic algorithm for bird species classification was proposed. The genetic algorithm significantly reduced the computational search space for identifying the best deep classifier ensemble compared to the brute-force approach.
The process of using selective deep architectures among the eight was performed using a genetic algorithm. The mechanism of genetic algorithm was applied by assigning the accuracy of classification as the fitness. Binary Tournament selection was used to find the fitter parents during the execution of the genetic algorithm, which selected the fit chromosome among two randomly selected chromosomes.
Mutations and crossovers were applied in parallel with equal probabilities. Based on the experiments, it can be concluded that a combination of two deep architecture classifiers namely EfficientNetV2L, and ViT, produced the highest classification accuracy of 97% for the median combining rule. This combination was computed only once and stored in a knowledge base for the classification of unknown bird images. The proposed model fails with poor-quality images, and there is still scope for researchers to work in this domain.
[1] Chen, Y., Song, J., Song, M. (2022). Hierarchical gate network for fine-grained visual recognition. Neurocomputing, 470: 170-181. https://doi.org/10.1016/j.neucom.2021.10.096
[2] Branson, S., Van Horn, G., Belongie, S., Perona, P. (2014). Bird species categorization using pose normalized deep convolutional nets. arXiv preprint arXiv:1406.2952. https://doi.org/10.48550/arXiv.1406.2952
[3] Jaderberg, M., Simonyan, K., Zisserman, A., Kavukcuoglu, K. (2015). Spatial transformer networks. arXiv preprint arXiv:1506.02025. https://doi.org/10.48550/arXiv.1506.02025
[4] Manna, A., Upasani, N., Jadhav, S., Mane, R., Chaudhari, R., Chatre, V. (2023). Bird image classification using convolutional neural network transfer learning architectures. International Journal of Advanced Computer Science and Applications, 14(3): 854-864. https://doi.org/10.14569/IJACSA.2023.0140397
[5] Zhang, N., Donahue, J., Girshick, R., Darrell, T. (2014). Part-based R-CNNs for fine-grained category detection. In Computer Vision – ECCV 2014. ECCV 2014. Lecture Notes in Computer Science, Springer, Cham. https://doi.org/10.1007/978-3-319-10590-1_54
[6] Huang, Y.P., Basanta, H. (2021). Recognition of endemic bird species using deep learning models. IEEE Access, 9: 102975-102984. https://doi.org/10.1109/ACCESS.2021.3098532
[7] Wei, X. S., Xie, C. W., Wu, J. (2016). Mask-CNN: Localizing parts and selecting descriptors for fine-grained image recognition. arXiv preprint arXiv:1605.06878. https://doi.org/10.48550/arXiv.1605.06878
[8] Kumar, S.V., Kondaveeti, H.K. (2024). Bird species recognition using transfer learning with a hybrid hyperparameter optimization scheme (HHOS). Ecological Informatics, 80: 102510. https://doi.org/10.1016/j.ecoinf.2024.102510
[9] Ngo, C.Y., Chong, L.Y., Chong, S.C., Goh, P.Y. (2023). Bird species recognition system with fine-tuned model. International Journal on Advanced Science, Engineering & Information Technology, 13(5): 1719-1726. https://doi.org/10.18517/ijaseit.13.5.19030
[10] Bold, N., Zhang, C., Akashi, T. (2019). Bird species classification with audio-visual data using CNN and multiple kernel learning. In 2019 International Conference on Cyberworlds (CW), Kyoto, Japan, pp. 85-88. https://doi.org/10.1109/CW.2019.00022
[11] Pang, C., Yao, H., Sun, X. (2014). Discriminative features for bird species classification. In ICIMCS '14: Proceedings of International Conference on Internet Multimedia Computing and Service, Xiamen China, pp. 256-260. https://doi.org/10.1145/2632856.2632917
[12] Mousavi, R., Eftekhari, M. (2015). A new ensemble learning methodology based on hybridization of classifier ensemble selection approaches. Applied Soft Computing, 37: 652-666. https://doi.org/10.1016/j.asoc.2015.09.009
[13] Dharmawan, T., Auliya, Y.A., Retnani, D.A., Bukhori, S., Zarkasi, M., Ataama, I. (2025). Optimizing DenseNet121 for waste classification using genetic algorithm-based downsampling and data augmentation. Mathematical Modelling of Engineering Problems, 12(5): 1711-1717. https://doi.org/10.18280/mmep.120526
[14] Kong, S., Fowlkes, C. (2017). Low-rank bilinear pooling for fine-grained classification. In 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, pp. 7025-7034. https://doi.org/10.1109/CVPR.2017.743
[15] Rai, P.K., Chaturvedi, S., Katiyar, S. (2019). Analysis of learning techniques: Bird species classification. International Journal of Computer Applications, 178(17): 12-16. https://doi.org/10.5120/ijca2019918969
[16] Yang, C.L., Harjoseputro, Y., Hu, Y.C., Chen, Y.Y. (2022). An improved transfer-learning for image-based species classification of protected Indonesians birds. Computers, Materials & Continua, 73(3): 4577-4593. https://doi.org/10.32604/cmc.2022.031305
[17] Naranchimeg, B., Zhang, C., Akashi, T. (2018). Cross-domain deep feature combination for bird species classification with audio-visual data. arXiv preprint arXiv:1811.10199. https://doi.org/10.48550/arXiv.1811.10199
[18] Yang, F., Shen, N., Xu, F. (2024). Automatic bird species recognition from images with feature enhancement and contrastive learning. Applied Sciences, 14(10): 4278. https://doi.org/10.3390/app14104278
[19] Kittler, J., Hatef, M., Duin, R.P., Matas, J. (2002). On combining classifiers. IEEE Transactions on Pattern Analysis and Machine Intelligence, 20(3): 226-239. https://doi.org/10.1109/34.667881
[20] Kumar, S.V., Kondaveeti, H.K. (2024). Towards transparency in AI: Explainable bird species image classification for ecological research. Ecological Indicators, 169: 112886. https://doi.org/10.1016/j.ecolind.2024.112886
[21] He, K., Zhang, X., Ren, S., Sun, J. (2016). Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, pp. 770-778. https://doi.org/10.1109/CVPR.2016.90
[22] Howard, A.G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., Andreetto, M., Adam, H. (2017). MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv preprint arXiv:1704.04861. https://doi.org/10.48550/arXiv.1704.04861
[23] Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich, A. (2015). Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, pp. 1-9. https://doi.org/10.1109/CVPR.2015.7298594
[24] Tan, M., Le, Q. (2019). EfficientNet: Rethinking model scaling for convolutional neural networks. In International Conference on Machine Learning, pp. 6105-6114.
[25] Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn, D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer, Heigold, G., Gelly, S., Jakob Uszkoreit, J., Houlsby, N. (2020). An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint arXiv:2010.11929. https://doi.org/10.48550/arXiv.2010.11929
[26] Sitepu, A.C., Liu, C.M., Sigiro, M., Panjaitan, J., Copa, V. (2022). A convolutional neural network bird’s classification using north American bird images. International Journal of Health Sciences, 6(S2): 15067-15080. https://doi.org/10.53730/ijhs.v6nS2.8988