Amruta Khare | Ganesh M. Kakandikar | Omkar K. Kulkarni*
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Present paper conducts the study on metaheuristic jellyfish optimization algorithm and reviews work done on it. This is a newly developed meta-heuristic optimization algorithm concentrates on movements of jellyfish in ocean such as search of food in sea current, motion inside swarm, bloom, etc. The optimization demonstrates higher and additional favourable results versus other bio-inspired optimization algorithms. Some of the work is discussed in this paper are: finding of unknown parameters of Photo Voltic models using premature convergence strategy, finding of optimal VAR coordination in Automated Delivery System, estimating the parameters of single-phase power transformers, overcoming the drawbacks and improving the quality of network service, tracking the overall maximum power point under partial shade conditions, improving MapReduce job performance and increasing resource usage in Hadoop yarn, solving engineering problems optimally with multiple objectives, dimensionally reducing humanoid application feature, solving the problems to identify the parameters of Polymer Exchange Membrane Fuel Cell models, watermark extraction process and preserving location confidentiality to avoid congestion with less guaranteed delay, OPNN network planning to categorise plant diseases, Brain image segmentation method and multiple radio access network. All the above work reviewed shows promising results from the algorithm. More work can be conducted using this algorithm in future.
jellyfish search optimizer, meta-heuristic, jellyfish bloom, sea current, time mechanism
The process of getting response parameters or opinions in a function that outcome in the function's minimal or maximum output is known as optimization. Variables make up the input; the method or function is known as a cost function, goal function, or fitness function; and the output is in cost or physical form [1]. An optimization problem can be solved using a variety of ways. Natural processes sparked the development of these approaches. These approaches normally start with a small selection of variables and work their way up to the target function's overall minimum or maximum [2]. Nowadays metaheuristic optimization algorithms have become common as difficult problems are re-solved through this method. This is applied in different fields as these problems have simple concepts and easy implementation. These methods don't require any knowledge of the objective function's gradient and can avoid local minima. They're utilised to solve a wide range of issues in a variety of sectors [3]. The use of a metaheuristic algorithm is reliant on computers. As a result, advances in computer processing power have paved the way for the creation of metaheuristic algorithms [4].
The genetic algorithm (GA) is the most popular technique in solving various optimization problems today. The optimization algorithms are based on behavioural studies of different animals to establish search and optimization process to find optimum solution in abbreviated period of time [5]. Some recent proven methods are Ant Colony Optimization (ACO) which illustrates the actions of ants while searching for food and leaving a trial behind [6, 7]. Cuckoo Optimization Algorithm rests on the life cycle of a bird called ‘cuckoo.’ It is studied by the observation of cuckoo bird finding another birds shelter to lay eggs and imitate other birds egg pattern [8, 9]. Grasshopper optimization imitates the behaviour of grasshopper in swarm [10]. Particle Swarm Optimization is inspired by bird flocking and fish schooling [11]. In addition to these renowned methods, research on nature-inspired optimization algorithms are still ongoing and new methods are under development to continuously solve nonlinear problems [12].
Figure 1. Behaviour of Jellyfish in sea
The algorithm is proposed by Dinh Nhat Truong in the year 2020. The algorithm is newly introduced and shows very promising results in the research conducted [13]. Jellyfish are marine animals, and the optimization algorithm is based on their moments such as: following the sea current, movement inside the swarm (active and passive movement), time control mechanism between switching movements and convergence into jellyfish bloom [14]. They are bell-shaped animals that can easily swim in the sea, but mostly rely on sea currents for their moments. Sea currents help jellyfishes to move in the direction that provides the most food reserve [15]. The algorithm is straightforward, adaptable, scalable and stabilizes exploration and exploitation of the search space, heading to normal optimal convergence. The moment of jellyfish in sea is shown in Figure 1.
There are two main phases in any metaheuristic algorithm: Exploration (diversification) and exploitation (intensification). Major difference between metaheuristic algorithms lies in the way in which they balance these two processes. Relationship between these metaheuristic algorithms, such as one or more population-based metaheuristics are frequently considered fundamental. Primary metaheuristics algorithms are based on unique solutions and are more oriented towards exploitation than exploration. Population-based metaheuristics carry more exploitation. Jellyfish Optimization Algorithm is based on both exploration and exploitation [16].
In the upcoming section (2) inspiration of the algorithm is discussed with its mathematical representation, calculations based on the motions and flowchart of the algorithm. In section (3) review of the algorithm based on different application area is elaborated.
1.1 Inspiration
Jellyfishes live in waters of profuse depths and temperatures across globe. They are shape similar to chimes; they are sometimes less than a cm in diameter on the other side sore are large. They vary in style of colours, sizes, and shapes. All the species adapts to the sea like environment. They have various feeding strategies: like utilization of tentacles to hold food on other hand some use filtered food method and eat whatsoever the current brings them [17]. Different jellyfishes enthusiastically hunt their prey and disable it by penetrating their tentacles.
They use tentacles to swindle the prey and release a poison which disables the prey. Jellyfish do not strike creatures. People who swim opposite to them are perchance bruised to death. Jellyfish stings can be painful, although they are seldom lethal. Pain, red markings, itching, numbness, and tingling are all symptoms of a typical bite. Nevertheless, the stings of some species of jellyfish, just like the jellyfish (called as sea wasp), are menacing and may even be fatal [18].
Jellyfish have characteristics that permit them to regulate their motion. Their lower half closes like an oval and repel water to move their physique ahead. In spite of this potential, they mainly wander in water, relaying on currents and tides. Once the state is favourable, the jellyfishes structure a swarm, and an oversized bunch of jellyfish is termed a jellyfish bloom [19]. The jellyfishes have infirm swimming bodies and their guidelines compared to currents are elementary for the upkeep of bloom.
Several factors govern swarm formation, such as sea currents, nutriment, oxygen availability, and temperature. Of those elements, sea currents are the foremost prime as they'll bring jellyfish along in a big swarm. Evidently, jellyfish can stay in places with comparatively more saltiness and less oxygen capacity [20]. They flourish on plankton while not competing with alternative species. The impact of the system on the jellyfish swarms is very important and current oriented swimming is crucial for their maintenance.
This phenomenon, as well as the movements of every jellyfish within the swarm and after the current to make the jellyfish bloom, offer these genera the power to look nearly anyplace within the sea [21]. The number of foods at areas visited by a jellyfish varies; therefore, the portion of food, the most effective position is identified. Therefore, a replacement algorithmic program is developed here that attracts on the search behaviour and motion of jellyfish in the sea [22]. It' referred to as Jellyfish Search Optimizer (JS). Figure 2 present the phases enclosed in the algorithm. Within the next subset, the behaviour, and motion of jellyfish within the sea are mathematically modelled associated an improvement algorithmic program supported the mathematical model is then developed.
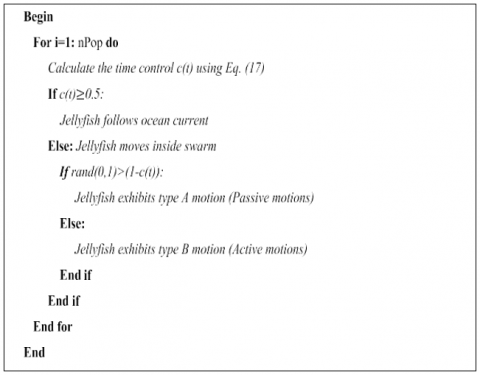
Figure 2. Pseudo code for algorithm
1.2 Mathematical model for optimization algorithm
Optimization is being centred on three rules:
Time control mechanism governing the moment of jellyfish in the sea current i.e., in the swarm or inside the swarm.
Jellyfish movement towards the food location with greater quantity.
The quantity of food in determining the site and its correspondence objective function.
1.3 Sea current
Sea holds huge number of nutrients, so the jellyfish are fascinated at it. The path of the sea current ($\overrightarrow{\text { trend }}$) is resolute by an average of all the vectors from every jellyfish in the sea to jellyfish that is presently in the finest site, (1) simulates the sea current.
$\begin{aligned} \overrightarrow{\text { trend }}=\frac{1}{n_{p o p}} \sum & \overrightarrow{\text { trend }_{\imath}}=\frac{1}{n_{p o p}} \sum\left(X^{*}-e_{c} X_{i}\right) =X^{*}-e_{c} \frac{\sum X_{i}}{n_{p o p}}=X^{*}-e_{c} \mu \end{aligned}$ (1)
$\operatorname{Set} d f=e_{c} \mu$ (2)
$\overrightarrow{\text { trend }}=X^{*}-d f$ (3)
where:
$n_{p o p}$= The number of jellyfish.
$X^{*}$= Jellyfish presently with finest site in the crowd.
$e c$= The factor governing desirability.
$\mu$= the mean of site of all jellyfish.
$d f$= The alteration among the recent finest site of the jellyfish and the mean location of all jellyfish.
Built on the theory that jellyfish have a standard spatial distribution in all scopes, a space of $\pm \beta \sigma$ all over the mean location includes a specific probability of all jellyfish, where $\sigma$ is the distribution's standard deviation.
Therefore,
$d f=\beta \times \sigma \times$ rand $(0,1)$ (4)
Set $\sigma=\operatorname{rand} \alpha(0,1) \times \mu$ (5)
Hence,
$d f=\beta \times \operatorname{rand} f(0,1) \times \operatorname{rand} \alpha(0,1) \times \mu$ (6)
To simplify Eq. (6) is written as:
$d f=\beta \times \operatorname{rand}(0,1) \mu$ (7)
where $e c=\beta \times \operatorname{rand}(0,1)$ (8)
$\overrightarrow{\text { trend }}=X^{*}-\beta \times \operatorname{rand}(0,1) \times \mu$ (9)
Now, the new site of jellyfish is given by:
$X_{i}(t+1)=X_{i}(t)+\operatorname{rand}(0,1) \times \overrightarrow{\text { trend }}$ (10)
is given by
$\begin{aligned} X_{i}(t+1)=& X_{i}(t)+\operatorname{rand}(0,1) \times\left(X^{*}\right. -\beta \times \operatorname{rand}(0,1)) \times \mu \end{aligned}$ (11)
where,
$\beta>0$ is a distribution coefficient that is proportional to the distance between two points (trend).
Based on the results of numerical tests using sensitivity analysis: $\beta=3$ is obtained.
1.4 Jellyfish swarm
Jellyfish move in swarms in both passive (type A) and active (type B) motions [23, 24]. Initially, the swarm is shaped, and virtually all jellyfish move in type A motion. As time passes, they begin to display type B movements. The locations of every jellyfish returned by Type A motion, and hence the later updated site of every jellyfish returned by Type B motion:
$X_{i}(t+1)=X_{i}(t)+\gamma \times \operatorname{rand}(0,1) \times\left(U_{b}-L_{b}\right)$ (12)
where, Ub and Lb are the upper duty-bound and lower duty-bound of look for the sites, correspondingly.
$\gamma>0$ is a motion coefficient, associated to the measurement of motion about jellyfish sites. Looking at the outcomes in numerical experiments of sensitivity analysis, $\gamma=0.1$.
Simulating type B movement, a jellyfish (j), but not the one in question, is randomly selected, and a vector of jellyfish of interest (i) is selected. To figure out the path of movement, a few jellyfish (j) are used. When the number of foods available in the position of the chosen jellyfish (j) surpasses that available in the jellyfish of interest's location (i) the latter advances towards the former; if the amount of food available for the selected jellyfish (j) is less than what is available for the jellyfish of interest (i) the latter swims away directly (i).
Therefore, every jellyfish goes on best path to search out food in a swarm (15) and (16) simulate a path of circulation and therefore updates the position of a jellyfish [25]. This change is seen as an economical exploitation of the native search area:
$\overrightarrow{S t e p}=X_{i}(t+1)-X_{i}(t)$ (13)
where,
$\overrightarrow{\text { Step }}=\operatorname{rand}(0,1) \times \overrightarrow{\text { Drrectlon }}$ (14)
$\overrightarrow{\text { Directıon }}=\left\{\begin{array}{c}X_{j}(t)-X_{i}(t) \text { if } f\left(X_{i}\right) \geq f\left(X_{i}\right) \\ X_{i}(t)-X_{j}(t) \text { if } \leq f\left(X_{j}\right)\end{array}\right.$ (15)
where, f is an objective function of site X.
Hence,
$X_{i}(t+1)=X_{i}(t)+\overrightarrow{\operatorname{Step}}$ (16)
Elaborate sort of movement over period, a period management mechanism is used. It regulates not solely the movements of type A and Type B in the swarm, however, conjointly shares of jellyfish within the sea current. The time management technique is detailed in subsequent sections.
1.5 Time control mechanism
Stream's comprises massive volumes of nutritive food, that attracts jellyfish. Over time, jellyfish congregate, and a swarm is created [26]. Once heat or wind changes the sea current, the jellyfish swarm moves to a different sea current, and another swarm of jellyfish is formed. Jellyfish motions create swarms of type A (passive movements) or type B (active movements) after specific intervals, and the jellyfish moment changes. The type A is most well-liked at the beginning and type B is chosen over time.
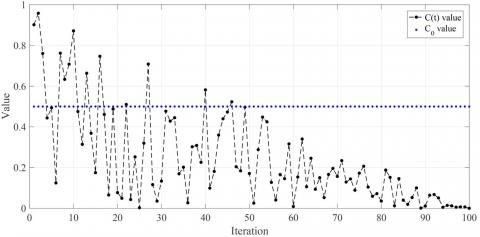
Figure 3. Time control function
The time management process is proposed to replicate this condition. The time management procedure involves a time operation c (t) and a continuous C0 to control jellyfish movement amid the wake stream and move at intervals in the jellyfish swarm. Time control function might be worth fluctuating from zero to one at random throughout time, as shown in Eq. (17), and Figure 3, which generates a time control function as time passes. The jellyfish will follow the water current once their value surpasses C0. They will migrate inside the swarm once its value is less than C0. Because a precise number for C0 is unknown, the time control changes erratically from zero to one. As a result, C0 is set to 0.5, which is a middle of zeros and ones.
$\mathrm{c}(\mathrm{t})=\left|\left(1-\frac{t}{M_{a x_{i t e r}}}\right) X(2 x \operatorname{rand}(0,1)-1)\right|$ (17)
where,
t = The number of iterations stated in time.
Max $_{i t e r}$= The maximum number of iterations that can be performed.
The function c(t) is a pseudo-code for a time control system:
(1 c(t)) is used to simulate the movement of a swarm of bees (type A or B).
Jellyfish shows type A motion when rand(0, 1) > (1 c(t)).
rand(0, 1) (1 c(t)) = Jellyfish moves in a type B manner.
1.6 Population initialization
The population of jellyfish is indiscriminately initiated however thanks to low diversity, tendency to induce unfree at native optima is more [27, 28]. Several chaotic maps are developed to boost the variety of the initial population [29]. These maps will offer more various initial population and do a random choice which is able to provides lower premature convergence [30].
$X_{i+1}=\eta X_{i}\left(1-X_{i}\right), \quad 0 \leq \mathrm{X}_{0} \leq 1$
Xi is the logistic chaotic value of location of the ith jellyfish.
X0 is used for creating initial population of jellyfish.
X0 $\in$ (0, 1);
X0 $\nexists${0.0, 0.25, 0.75, 0.5, 1.0};
$\eta$ =4.0.
Figure 4. Flowchart of algorithm
1.7 Boundary conditions
Earth consists of many seas and jellyfish tend to move outside the specified boundary conditions. These jellyfish now become part of some other boundary condition and thus the below equation present re-entering process:
$\left\{\begin{array}{l}X_{i . d .}^{\prime}=X i, d-U b, d+L b(d) \text { if Xi, d }>\text { Ub, d } \\ X_{i, d}^{\prime}=X i, d-L b, d+U b(d) \text { if Xi,d }<\mathrm{db}, \mathrm{d}\end{array}\right.$ (18)
Xi,d is the site of the ith jellyfish in dth dimension.
$X_{i . d}^{\prime}$ is the updated site after examining boundary constraints.
Ub,d and Lb,d are upper bound and lower of dth dimension in search spaces.
1.8 Schematic representation of artificial JS optimizer
Exploration and exploitation are the two main steps of a metaheuristic algorithmic programme. Moving towards the stream is a probe in the artificial JS optimizer, thus motions inside a swarm of jellyfish are an exploitation and a bearing mechanism as time passes amongst them. At first, the likelihood of exploration outstrips that of exploitation to seek out areas that comprise favourable best locations; throughout the time, the possibility of exploitation becomes a lot of over that of exploration, and jellyfish determine the simplest position within the known areas. Figure 4 shows the flow diagram of the artificial JS optimizer, respectively.
The use of the Jellyfish Optimization Algorithm to engineering optimization issues has drawn attention to its promising capabilities. JSO obtains improved answers than current answers in literature. Some of applications are-
Shaheen et al. [31] present an efficient method created on the Jellyfish Search Algorithm (JFSA) for optimum Volt/VAR management in the automated delivery system (ADS) based on reconfiguration of the common distribution system (DSR), on the integration of distributed generation units (DG) and on the operation of static VAR distribution compensators (SVC). It minimizes failures and reduces emissions while considering regular load variation. Paper discusses the results and the procedure carried out on 33bus and 69bus DS in different scenarios while maintaining a flat voltage at 1p. The algorithm succeeded in reducing 85.3% of early non-automated and uncontrolled system. It also maintains low CO2 emission values.
Siddiqui et al. [32] used the Artificial Jellyfish Search Optimizer (AJFS) for selective modulation supports elimination of harmonics for a multi-level inverter voltage control (PWM) application. It focuses on removing unwanted lower order harmonics in PWM output voltage waveforms. They applied the rule to 5, 7 and 9 levels of CHBMLI. AJFS is used to calculate the results, which are then compared to other differential evolution techniques. IGBT (IGB20N60H3) is utilised throughout the creation of CHBMLI. It indicated 60V in each VDC1 and VDC2 for the first five levels; 40V in VDC1 and 80V in VDC2 for the next seven levels; and 90V in VDC1 and 30V in VDC2 for the ninth level. AJFS discovered shift angles ((1,) (2,) (3, ...) s) that are held in the operation table. To obtain the SHEPWM signal pulse pattern, the values from the search table are equipped to the TMS320F28379 (digital signal controller board). TLP 250 receives the signal from the controller and processes it using a driver IC board to regulate the signal. To display the output waveforms and determine the THD, a Tektronix TDS 2024B oscilloscope is used. The 5th, 7th and 11th harmonics are removed with a remarkably low ThD price and with a highest voltage capable 74.4V; the RMS voltage and current created is 25.6 V and 3.08 A. The vary over the "m" values obtained shows that AJFS provides a lower ThD value than the opposite algorithms.
Abdel-Basset et al. [33] To find unknown parameters in photovoltaic models, a revised jellyfish search optimizer (MJSO) with a premature convergence method (PCS) was presented. The PCS preserves the range of the population however focuses on the simplest answer. It uses 2 movements: (i) move the present solution between two members elite arbitrarily and (ii) explore for a much better solution between the best solution found up to now and also the random one among the populations. In this paper, the experiment is dole out on 3 totally different photovoltaic technologies and compared to alternative machine frameworks. 3 different photovoltaic models are used here: France cell, PWP201 watt photo module, STP6120 / thirty-six module and its performance has been discovered on 2 industrial photovoltaic systems supported SDM and DDM. To implement the methods, the tests are carried out on a tool with a 2.40 rate Intel® Core TM i74700MQ processor, 32 GB of RAM, Windows 10, and MATLAB R2019a. It backed up the trials, claiming that the France RTC cell based on SDM, MJSO, could attain a median RMSE price of 7.730063E3 A. An equal result was achieved with different algorithms, although at a slower rate of convergence. MJSO reduces RMSE to an average value of 7.419372E3 A for DDM and R. Cell TC France, outperforming other techniques. In addition, two electrical phenomenon modules (monocrystalline and thin film) are employed as photovoltaic technologies samples at varied irradiance and temperature levels to establish the prevalence of the proposed technique under various operating settings. Future study will compare the performance of this approach to that of one of the competing strong optimisation algorithms in order to obtain better results in extracting photovoltaic cell parameter values quickly and correctly.
Youseef et al. [34] introduces a new way to estimate the parameters of single-phase power transformers by using the jellyfish search (JS) optimization algorithm. The study aimed to evaluate the limits of the corresponding circuit of the single-phase electrical device supported the present and voltage prices at completely different load values. Here is that the distinction between the particular information and therefore the calculable value of the parameter, the error is taken because the main target and minimized. The experiments are carried out on a single-phase transformer 4kVA, 250/125 V, 50 Hz. The percentage of error obtained is lower in JS compared to other algorithms, it also provided a better value of the parameter of the transformer in operation at full load. The result showed that the JS algorithm converges faster than PSO.
Selvakumar and Manivannan [35] paper introduces a brand-new rule to beat the drawbacks and improve commonplace} of network service. The planned combination, PRDFJFSO, outperforms well in terms of spectrum usage, network potency and QoS compared to advanced spectrum defragmentation algorithms in line with the results of experiments conducted mistreatment metrics standard quality. When a new association request arrives, the reactive defragmentation network calls back and allocates spectrum resources (FS) as needed. Once finishing every network connection, the invoked proactive algorithm can reorganize the spectrum slots for following connection demands. The quantity of reallocations of the connections created is directly proportional to the rise within the use of spectrum and network resources. This is often completed when there is a high network traffic load associated with the development of a jellyfish swarm. Now, it recovers the employment of network resources and minimizes the chance of information measure interference compared to dominant approaches. The simulation results show the most effective use of spectrum, scale back the quality of spectrum fragmentation, improve the speed of bandwidth fragmentation, and reduce overall association blocking.
Alam [36] in this paper discusses the functioning of the novel jellyfish search (JSO) improvement strategy in electrical phenomenon frames to trace the general maximum power point (GMPP) beneath partial shade conditions (PSC). To deal with the methods, maximum power point tracking (MPPT) strategies with unsteady power problems are used, forcing the PV module to figure an utmost power point (MPP). To test the efficiency of the JSO approach in following the overall MPP under PSC circumstances, a simulation is done using MATLAB version 2021. Once every panel was used with associate degree insolation of 900 W / M2 it had been determined that when 2 iterations the particles converged at a continuing worth of 152.6 watts. Similarly, a maximum of 427.4 watts was achieved in two panels with a thousand and 900 W / M2 insulation at a constant temperature of 25℃. A fitness value for each particle was developed until the 11th iteration, and only the simplest mapping values were picked. Simulations recommend that the JSO methodology has sensible following speed and accuracy.
Ding et al. [37] paper on JS algorithmic rule talks on on-line Performance optimisation System to enhance MapReduce Job Performance and Increase Resource Usage in Hadoop Yarn. Throughout the optimization process, Jellyfish first modifies the conformation constraints by falling the spatiality of the search area using a divide-and-conquer technique and then recovering the search space with a model-based step-up algorithm; Secondly, Jellyfish reprogrammes resources in nodes using a novel elastic instrumentality that may dynamically expand and compress supported resource utilisation, as well as a resource reprogramming approach that makes full use of cluster resources. Experiments demonstrate Jellyfish can enhance the operation of MapReduce jobs by an average of 24% for 1st jobs and 65% on average for jobs that run multiple times compared to the default YARN.
Chou and Truong [38] created a MultiObjective Jellyfish Search (MOJS) method to solve engineering problems with numerous goals as efficiently as possible. MOJS incorporates Lévy flight, population leadership, archived dimension, chaotic map, and therefore opposition-based jumping approach to get sociologist optimum answers. The algorithm is compared against six established metaheuristic optimisation algorithms (MOALO, MODA, MOEA/D, MOGWO, MOPSO, and NSGAII) on twenty multiobjective mathematical standard problems. MOJS was used to address three unnatural structural issues (25bar tower design, 160bar tower design, and 942 bar tower design) in order to reduce structural weight and increase nodal deflection. The situation distance and game equipment choice are wont to manage with efficiency and archive population that contains easiest and most effective nondominated solutions that were found throughout the exploration of the search space. The sociologist best fronts obtained were linked to those acquired mistreatment single-objective and multi-objective ways within the literature and MOJS obtained sensible leads to finding the 3 style issues. Furthermore, given a relatively small number of assessments, the predicted rule is exceedingly simple and straightforward to implement. As a result, MOJS is a powerful and effective tool for solving multi-objective engineering optimization issues.
Elkabbash et al. [39] provides a completely unique detection approach that uses the artificial Jellyfish Search (JS) optimizer to optimise the random vector functional link (RVFL) after dimensional reduction of robotics features. To improve classification performance, JS is used to check the basic patterns of RVFL. RVFL+JS shortens the time it takes to implement optimal patterns by prioritising effective performance assessment. It was tested on a dataset containing 11,598 multi-class apps and 471 static-dynamic capabilities. Job increases machine-learning efficiency by achieving a progressive malware recognition accuracy of 98.41%, while decisive RVFL network hyperparameters lower runtime costs. In upcoming study, implementation of the method might even be better exploitation machine-learning models. Such could also be linked to the ready-to-use packages equivalent to HyperOpt associate degreed Optuna frameworks to generate the automatic instrument for analysing robot uses and generate a dynamically updated dataset.
Gouda et al. [40] paper uses the Jellyfish Search rule (JSA) to unravel the matter of characteristic the parameters of chemical compound Exchange Membrane electric cell (PEMFC) models. The decrease of the total of square errors (SSE) between the points of the measured and calculable voltage sets defines the fitness operate that will be optimized by Air Combat Command undergo a collection of self-constrained difference limits. It defines seven unknown parameters of PEMFC generator sets supported the well-known Mann model. Demonstrations are performed on 3 typical take a look at cases with the required numerical simulations and key options below MATLAB software. the simplest final SSE results for the 500W BCS module, 250W battery and NedStack sort PS6 units are 0.011699, 0.33598 and 2.14570 V2; respectively. Similarly, it is important to note that the maximum bias voltage error for all of the situations tested is less than 1%; more precisely, errors are sufficient for 0.108 percent, 0.2819 percent, and 0.68 percent for the BCS 500W, 250W, and NedStack PS6 modules, respectively. Experiment results highlight the benefits of the custom-made JSA methodology compared to others.
Dhevanandhini and Yamuna [41] focuses on the extraction of watermarks. First, the videos are broken into sub videos as part of the extraction technique. Every video is then reincarnated into frames. Then, for each frame, DWT is applied. The co- coefficients are ideally chosen victimisation a man-made jellyfish algorithm to improve the DWT performance. When this occurs, the watermark encryption/decryption method is utilised, together with a unique form of media (grey picture, colour image) as a watermark. The picture is compressed using the H.265 video encryption technology after it has been watermarked. In the MAT laboratory version, the approach is enforced (7.12). This system runs on a Windows PC with a 1.6 gigacycle per second Intel Core i5 CPU and four gigabytes of RAM. The programme was put to the test against a database of publicly available information on the internet. The information comes from the ASCII text file system, which is part of the "512 512" images. The anticipated methodology's and present methods' performance is evaluated in terms of AD, MD, NAE, and SC, respectively. From the comparison analysis, we are able to conclude that the proposed method is achieved, and also the best results are obtained by jellyfish method than the DWT based mostly watermarking technique.
Christopher and Jasper [42] proposes a Dynamic Jellyfish Routing Protocol (JDRP) to preserve location confidentiality and avoid congestion with less guaranteed delay. With this routing technique, the whole field of the device is split into many sectors and every sector selects a target to encourage transmission range. The dynamic routing system is supported by a virtual ring known as a bell node and a radial line known as Sprawling Node. To build a network, you'll need a lot of nodes. The number of radial lines and hence the radius of the virtual ring are both chosen in an exceeding network to make the communication path from node to sink easier. During that construction, the radial line methods are transmitted directionally, and the bell nodes are transmitted probabilistically with angular directions. The sprawling nodes receive data from the route and send it to the dynamic sink, which ensures that the data is acquired quickly enough for the offender to predict their whereabouts. According to the routing design, attackers are unable to forecast the placement path and dynamic forwarding path. For a single mobile receiver, it can extend network lifetime, reduce power consumption, and improve packet latency. The results of JDRP simulations were compared to QDVGDD, QWRP, and the echinoderm routing protocol, and it was discovered that JDRP performs well in a variety of network circumstances and efficiently controls the routing of information packets to the dynamic receiver.
Kaveh et al. [43] Quantum JS (QJS) is a quantum-based Jellyfish Search method that may be used to address structural optimization challenges. In comparison to other JS, improvements such as a quantum-based update rule are used to maximise search space diversification, a new handling mechanism was created to avoid getting stuck in local optima, and (3) changes to the time control mechanism were made to maintain a better balance between global and local searches. This algorithm solves frequency-constrained large-scale cyclic symmetric dome optimization problems. For free vibration analysis of rotationally repeated structures, an efficient eigen solution approach is used to perform structural studies essential for the optimization process. When compared to the present traditional eigen solution approach, it saves a significant amount of time. According to numerical findings, QJS outperforms the standard JS and performs as well as or better than other state-of-the-art optimization methods. Furthermore, as compared to the conventional eigen solution approach, the current eigen solution method significantly reduces the necessary computing time for the optimization process.
Chou et al. [44] talks about techniques for improving the reinforcement of soil to use in various application. The system experiments were created using FRS datasets, which are made up of 20 discoveries and were distributed between 1983 and 2015. In scenario 12 with 12 features, the most accurate model is selected (X2-X10, X12, X13, and X15). The optimal model, which had excellent accuracy and low feature acquisition cost, was discovered to employ a different mix of five features: fibre content as a volume percentage (X4), fibre gravity (X6), soil grade (X8), soil friction angle (X10), and the soil interface coefficient (X13). This offered a unique hybrid forecasting scheme, such as the JS-WFLSSVR proposed scheme, which outperforms other models. For tackling the forecasting difficulty, a novel combination of 12 characteristics has been devised. To develop another unique combination of five characteristics that gives a very accurate solution to the problem of forecasting the FRS top friction angle with minimum feature procurement expenses, we used maximum precision FRS top friction angle. To aid geoengineers in planning the shear strength of FRS, an easy-to-use interface has been created. Future research will look at possible equations for the JS algorithm's timing functions, as well as encouraging JS to use self-optimizing optimizers and deep learning approaches to increase the accuracy and computing speed of predictive systems.
Hussain et al. [45] proposed the IoV environment, which uses three handover, network selection, and routing algorithms from several radio access networks. The dynamic Q-learning approach is used to make handovers, which computes dynamic thresholds using the Shannon entropy rule and also assesses the need for handover. Fuzzy-CNN, which analyses numerous requests simultaneously and allows for the consideration of many parameters when selecting a network, is used to make an appropriate network selection. In addition, a routing method is developed that creates V2V pairings and uses a jellyfish optimization technique to find the optimum path to decrease end-to-end delay and packet losses. Vehicle, channel, and performance metrics are used to define the goal function. The simulation results suggest that the proposed work is superior in terms of mean HO, HO failure rate, throughput, delay, and other factors.
Mouassa et al. [46] proposes the Algerian electrical network DZA 114-bus and modified IEEE 30-bus test system an efficient and resilient slime mould-inspired algorithm was proposed to give an optimal-solution to the stochastic OPF problem. The Weibull and lognormal PDFs distributions were used to describe the uncertainty of both solar and wind energy sources. HGS, AEO, GTO, and the orca predation algorithm are four optimization algorithms employed on different test systems to assess the performance of the SM algorithm (OPA). The numerical results of SMA are compared to the results of the methods discussed above. Regardless of the test system constraints, the SMA significantly outperformed the AEO, JS, HGS, MFO, GTO, and BMO techniques in the base case and other sub-cases. The findings show that the suggested SMA is capable of dealing with severely nonlinear situations. The findings of this document are likely to be useful to academics.
Abdel-Basset et al. [47] presents performance of a new medical image segmentation algorithm based on the unique JSA meta-heuristic technique is enhanced in order to obtain the best thresholds of brain MR images. IJSA has been improved using two innovative strategies: ranking-based updating and a new adaptive technique. To increase the quality of solutions that are deleted, ranking-based updating is utilised to replace undesirable solutions within populations with alternatives created via novel updating. To minimise descents into local minima, the new adaptive method encourages JSA exploitation around the optimum overall solution. The two techniques are combined successfully with the JSA to produce the IJSA, which thresholds brain MR images optimally. At threshold levels of 3, 4, 5, 6, 7, 8, 10, 15, 20, 25, and 30, seven brain MR images are segmented. In terms of fitness, SSIM, PSNR, SD, and FSIM, the IJSA compares against numerous modern segment algorithms, including improved and standard MPAs, modified and standard DDAs, EO, and the standard JSA. In all measures except the SSIM, where the IJSA was competitive, the experimental findings and Wilcoxon rank-sum test reveal that the recommended method is superior to the IJSA. In the future, the novel method will be used with a traditional neural network to increase the classification accuracy of brain tumour MR images.
Akanksha et al. [48] based on automated plant leaf disease, an efficient OPNN classifier has been developed. The smoothing parameter of the ANN has been appropriately set using AJO to improve the PNN classifier operation. AJO and PNN mathematical functions are described in detail. In addition, the FCM technique is used to segment the data. This methodology's efficiency has been calculated in terms of accuracy, sensitivity, and specificity. The suggested technique has a maximum accuracy of 95.5 percent, which is comparable to other methods. It will be feasible to recognise different forms of illness in maize plants in the future.
Abdulnasser et al. [49] proposes solution for continually rising electricity demands. The placement and size of capacitor banks (CBs) as well as distributed generation will be optimised, resulting in a decrease in power failure and the establishment of voltage profiles (DGs). It is the result of a rise in the voltage stability index (VSI) as well as the voltage magnitude deviations (VD). However, this method should be approached with caution, since incorrect DG size and/or location might have a severe influence on distribution networks. This research presents an efficient method for DG and CB size and placement. The optimization model is solved using the Jellyfish search algorithm (JS). Various instances are studied to explain the efficiency of the proposed algorithm, beginning with the allocation of just CBs, then the allocation of both CBs and DGs, and finally the allocation of both CBs and DGs. Despite the fact that their effective and responsive power capacities are considered. A multi-objective optimization is also carried out, considering the technical, economic, and emission objectives. According to the findings, the JS achieves satisfactory outcomes in terms of technical, economic, and emission goals. Furthermore, the data show that DGs with a variable power factor (pf) perform better. MATLAB software was used to do the calculations for the IEEE-33 bus system.
Barshandeh et al. [50] introduces the Learning-Automata (LA) mechanism, which makes the optimization solution selection process more dynamic. Based on history and status, the LA determines the optimum course of action and carefully stabilises exploration and exploitation. The suggested approach resolves the artificial Jellyfish search algorithm (JS) and the Marine Predator Approach (MPA) to lower their computational difficulty while maintaining their strengths. The LA's probability vector is also augmented to improve its efficiency. Later, the JS and MPA algorithms are redeveloped using the proposed LA mechanism. On 38 low- and high-dimensional benchmark functions, the proposed LA-based hybrid is statistically and visually compared to state-of-the-art algorithms. The proposed LA-based hybrid algorithm's efficacy is tested on the data clustering problem. The proposed method is tested on 10 datasets, with the results compared to rival techniques using a variety of criteria. The testing results revealed the suggested LA-based hybrid algorithm's dominance.
The study of artificial Jellyfish Search resulted in the creation of a brand-new metaheuristic optimization algorithm based on the behaviour of jellyfish searching for food in the sea, which includes initially following a stream, then making time-dependent arrangements within jellyfish swarms, and finally a time management mechanism for switching between these motions. Jellyfish begin the exploration stage by following the sea currents in search of the most basic areas (exploration stage). Swarms of jellyfish grow over time, and each jellyfish moves within the swarm to acquire better conditions, using both active and passive motions, resulting in exploitative throughout this period (exploitation stage). Meanwhile, among these motions, the time-management system varies. Jellyfish bloom happens when the loop is repeated, and this is the ideal period. Numerical experiments have shown that the JS formula does a decent job of combining exploration and exploitation to get the best value. When applied to various issue statements, the algorithm produced promising and favourable outcomes.
The algorithm will be studied extensively in the future in all branches of research. To increase the number of applications, further research in the fields of automation and mechanical engineering should be conducted.
|
JS |
Jellyfish Search |
|
TSA |
Tree-Seed Algorithm |
|
ABC |
Artificial Bee Colony |
|
DE |
Differential Evolution |
|
FA |
Firefly Algorithm |
|
GA |
Genetic Algorithm |
|
PSO |
Particle Swarm Optimization |
|
$\overrightarrow{\text { trend }}$ |
Direction of the ocean current |
|
$n_{p o p}$ |
Number of jellyfish |
|
$M a x_{i t e t}$ |
Maximum number of iterations |
|
f(X) |
Objective function |
|
$X^{*}$ |
Jellyfish currently with the best location in the swarm |
|
$e_{c}$ |
Factor that governs the attraction |
|
μ |
Mean location of all jellyfish |
|
df |
Difference between the location of currently best jellyfish and the mean location of all jellyfish |
|
$\alpha$ |
Significance level of Wilcoxon rank sum test |
|
$\beta$ |
Distribution coefficient |
|
$\gamma$ |
Motion coefficient |
|
$U_{b}$ |
Upper bound of search spaces |
|
$L_{b}$ |
Lower bound of search spaces |
|
$X_{i}(t)$ |
Location of ith jellyfish at time t |
|
$X_{i}$ |
Logistic chaotic value of location of the ith jellyfish |
|
$\overrightarrow{\text { Dlrectlon }}$ |
Direction of motion in a swarm. c(t) Time control function |
|
Co |
Constant of time control function |
[1] Hassan, B.A., Rashid, T.A. (2020). Operational framework for recent advances in backtracking search optimisation algorithm: A systematic review and performance evaluation. Applied Mathematics and Computation, 370: 124919. https://doi.org/10.1016/j.amc.2019.124919
[2] Kirkpatrick, S., Gelatt, C.D., Vecchi, M.P. (1983). Optimization by simulated annealing. Science, 220(4598): 671-680. https://doi.org/10.1126/science.220.4598.671
[3] Birattari, M., Paquete, L., Stützle, T. (2001). Classification of metaheuristics and design of experiments for the analysis of components. Damstadt University of Technology.
[4] de Vicente, J., Lanchares, J., Hermida, R. (2003). Placement by thermodynamic simulated annealing. Physics Letters, Section A: General, Atomic and Solid State Physics, 317(5-6): 415-423. https://doi.org/10.1016/j.physleta.2003.08.070
[5] Bhoskar, T., Kulkarni, O.K., Kulkarni, N.K., Patekar, S.L., Kakandikar, G.M., Nandedkar, V.M. (2015). Genetic algorithm and its applications to mechanical engineering: A review. Materials Today: Proceedings, 2(4-5): 2624-2630. https://doi.org/10.1016/j.matpr.2015.07.219
[6] Dorigo, M., Blum, C. (2005). Ant colony optimization theory: A survey. Theoretical Computer Science, 344(2-3): 243-278. https://doi.org/10.1016/j.tcs.2005.05.020
[7] Dorigo, M., Gambardella, L.M. (1997). Ant colony system: a cooperative learning approach to the traveling salesman problem. IEEE Transactions on Evolutionary Computation, 1(1): 53-66. https://doi.org/10.1109/4235.585892
[8] Joshi, A.S., Kulkarni, O., Kakandikar, G.M., Nandedkar, V.M. (2017). Cuckoo search optimization- A review. Materials Today: Proceedings, 4(8): 7262-7269. https://doi.org/10.1016/j.matpr.2017.07.055
[9] Rajabioun, R. (2011). Cuckoo optimization algorithm. Applied Soft Computing Journal, 11(8): 5508-5518. https://doi.org/10.1016/j.asoc.2011.05.008
[10] Neve, A.G., Kakandikar, G.M., Kulkarni, O. (2017). Application of grasshopper optimization algorithm for constrained and unconstrained test functions. International Journal of Swarm Intelligence and Evolutionary Computation, 6(3): 1-7. https://doi.org/10.4172/2090-4908.1000165
[11] Kulkarni, N.K., Patekar, S., Bhoskar, T., Kulkarni, O., Kakandikar, G.M., Nandedkar, V.M. (2015). Particle swarm optimization applications to mechanical engineering- A review. Materials Today: Proceedings, 2(4-5): 2631-2639. https://doi.org/10.1016/j.matpr.2015.07.223
[12] Hussain, K., Mohd Salleh, M.N., Cheng, S., Shi, Y. (2019). Metaheuristic research: A comprehensive survey. Artificial Intelligence Review, 52(4): 2191-2233. https://doi.org/10.1007/s10462-017-9605-z
[13] Chou, J.S., Truong, D.N. (2021). A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean. Applied Mathematics and Computation, 389: 125535. https://doi.org/10.1016/j.amc.2020.125535
[14] Richardson, A.J., Bakun, A., Hays, G.C., Gibbons, M.J. (2009). The jellyfish joyride: Causes, consequences and management responses to a more gelatinous future. Trends in Ecology and Evolution, 24(6): 312-322. https://doi.org/10.1016/j.tree.2009.01.010
[15] Fossette, S., Gleiss, A.C., Chalumeau, J., Bastian, T., Armstrong, C.D., Vandenabeele, S., Karpytchev, M., Hays, G.C. (2015). Current-oriented swimming by jellyfish and its role in bloom maintenance. Current Biology, 25(3): 342-347. https://doi.org/10.1016/j.cub.2014.11.050
[16] de Vicente, J., Lanchares, J., Hermida, R. (2003). Placement by thermodynamic simulated annealing. Physics Letters, Section A: General, Atomic and Solid State Physics, 317(5-6): 415-423. https://doi.org/10.1016/j.physleta.2003.08.070
[17] Bastian, T., Lilley, M.K.S., Beggs, S.E., Hays, G.C., Doyle, T.K. (2014). Ecosystem relevance of variable jellyfish biomass in the Irish Sea between years, regions and water types. Estuarine, Coastal and Shelf Science, 149: 302-312. https://doi.org/10.1016/j.ecss.2014.08.018
[18] Fenner, P., Williamson, J., Burnett, J., Rifkin, J. (1993). First aid treatment of jellyfish stings in Australia response to a newly differentiated species. The Medical Journal of Australia, 158(7): 498-501. https://doi.org/10.5694/j.1326-5377.1993.tb137588.x
[19] Hong, W.C., Dong, Y., Chen, L.Y., Wei, S.Y. (2011). SVR with hybrid chaotic genetic algorithms for tourism demand forecasting. Applied Soft Computing Journal, 11(2): 1881-1890. https://doi.org/10.1016/j.asoc.2010.06.003
[20] Kiran, M.S. (2015). TSA: Tree-seed algorithm for continuous optimization. Expert Systems with Applications, 42(19): 6686-6698. https://doi.org/10.1016/j.eswa.2015.04.055
[21] Skala, V. (2012). Artificial jellyfish: Evolutionary optimization of swimming. http://www.VaclavSkala.eu.
[22] Xiang, W., Ma, S., An, M. (2014). hABCDE: A hybrid evolutionary algorithm based on artificial bee colony algorithm and differential evolution. Applied Mathematics and Computation, 238: 370–386. https://doi.org/10.1016/j.amc.2014.03.055
[23] Hays, G.C. (2017). Ocean currents and marine life. Current Biology, 27(11): R470-R473. https://doi.org/10.1016/j.cub.2017.01.044
[24] Fossette, S., Gleiss, A.C., Chalumeau, J., Bastian, T., Armstrong, C.D., Vandenabeele, S., Karpytchev, M., Hays, G.C. (2015). Current-oriented swimming by jellyfish and its role in bloom maintenance. Current Biology, 25(3): 342-347. https://doi.org/10.1016/j.cub.2014.11.050
[25] Kiran, M.S., Findik, O. (2015). A directed artificial bee colony algorithm. Applied Soft Computing Journal, 26: 454-462. https://doi.org/10.1016/j.asoc.2014.10.020
[26] Mariottini, G.L., Pane, L. (2010). Mediterranean jellyfish venoms: A review on scyphomedusae. Marine Drugs, 8(4): 1122-1152. https://doi.org/10.3390/md8041122
[27] Xiang, T., Liao, X., Wong, K. (2007). An improved particle swarm optimization algorithm combined with piecewise linear chaotic map. Applied Mathematics and Computation, 190(2): 1637-1645. https://doi.org/10.1016/j.amc.2007.02.103
[28] Kaveh, A., Mahdipour Moghanni, R., Javadi, S.M. (2019). Optimum design of large steel skeletal structures using chaotic firefly optimization algorithm based on the Gaussian map. Structural and Multidisciplinary Optimization, 60(3): 879-894. https://doi.org/10.1007/s00158-019-02263-1
[29] May, R. (1976). Simple mathematical models with very complicated survey. Nature, 261(5560): 459-67. 10.1038/261459a0
[30] Chou, J.S., Ngo, N.T. (2017). Modified firefly algorithm for multidimensional optimization in structural design problems. Structural and Multidisciplinary Optimization, 55(6): 2013-2028. https://doi.org/10.1007/s00158-016-1624-x
[31] Shaheen, A.M., Elsayed, A.M., Ginidi, A.R., Elattar, E.E., El-Sehiemy, R.A. (2021). Effective automation of distribution systems with joint integration of DGs/ SVCs considering reconfiguration capability by jellyfish search algorithm. Current Opinion in Obstetrics and Gynecology, 9: 92053-92069. https://doi.org/10.1109/ACCESS.2021.3092337
[32] Siddiqui, N.I., Alam, A., Quayyoom, L., Sarwar, A., Tariq, M., Vahedi, H., Ahmad, S., Shah Noor Mohamed, A. (2021). Artificial jellyfish search algorithm-based selective harmonic elimination in a cascaded h-bridge multilevel inverter. Electronics (Switzerland), 10(19). https://doi.org/10.3390/electronics10192402
[33] Abdel-Basset, M., Mohamed, R., Chakrabortty, R.K., Ryan, M.J., El-Fergany, A. (2021). An improved artificial jellyfish search optimizer for parameter identification of photovoltaic models. Energies, 14(7). https://doi.org/10.3390/en14071867
[34] Youssef, H., Hassan, M.H., Kamel, S., Elsayed, S.K. (2021). Parameter estimation of single phase transformer using jellyfish search optimizer algorithm. 2021 IEEE International Conference on Automation/24th Congress of the Chilean Association of Automatic Control, ICA-ACCA, pp.1-4. https://doi.org/10.1109/ICAACCA51523.2021.9465279
[35] Selvakumar, S., Manivannan, S.S. (2021). A spectrum defragmentation algorithm using jellyfish optimization technique in elastic optical network (EON). Wireless Personal Communications. https://doi.org/10.1007/s11277-021-08572-3
[36] Alam, A., Verma, P., Tariq, M., Sarwar, A., Alamri, B., Zahra, N., Urooj, S. (2021). Jellyfish search optimization algorithm for MPP tracking of PV system. Sustainability (Switzerland), 13(21). https://doi.org/10.3390/su132111736
[37] Ding, X., Liu, Y., Qian, D. (2016). JellyFish: Online performance tuning with adaptive configuration and elastic container in Hadoop yarn. Proceedings of the International Conference on Parallel and Distributed Systems - ICPADS, pp. 831-836. https://doi.org/10.1109/ICPADS.2015.112
[38] Chou, J.S., Truong, D.N. (2020). Multiobjective optimization inspired by behavior of jellyfish for solving structural design problems. Chaos, Solitons and Fractals, 135: 109738. https://doi.org/10.1016/j.chaos.2020.109738
[39] Elkabbash, E.T., Mostafa, R.R., Barakat, S.I. (2021). Android malware classification based on random vector functional link and artificial Jellyfish Search optimizer. PLoS ONE, 16(11): e0260232. https://doi.org/10.1371/journal.pone.0260232
[40] Gouda, E.A., Kotb, M.F., El-Fergany, A.A. (2021). Jellyfish search algorithm for extracting unknown parameters of PEM fuel cell models: Steady-state performance and analysis. Energy, 221: 119836. https://doi.org/10.1016/j.energy.2021.119836
[41] Dhevanandhini, G., Yamuna, G. (2021). An efficient lossless video watermarking extraction process with multiple watermarks using artificial jellyfish algorithm. Turkish Journal of Computer and Mathematics Education, 12(6).
[42] Christopher, V.B., Jasper, J. (2021). Jellyfish dynamic routing protocol with mobile sink for location privacy and congestion avoidance in wireless sensor networks. Journal of Systems Architecture, 112: 101840. https://doi.org/10.1016/j.sysarc.2020.101840
[43] Kaveh, A., Hamedani, K.B., Kamalinejad, M., Joudaki, A., Kaveh, A. (2021). Quantum-based jellyfish search optimizer for structural optimization. International Journal of Optimization in Civil Engineering, 11(2): 329-356.
[44] Chou, J.S., Truong, D.N., Le, T.L., Thu Ha Truong, T. (2021). Bio-inspired optimization of weighted-feature machine learning for strength property prediction of fiber-reinforced soil. Expert Systems with Applications, 180: 115042. https://doi.org/10.1016/j.eswa.2021.115042
[45] Hussain, S.M., Yusof, K.M., Hussain, S.A., Asuncion, R. (2021). Performance evaluation of vertical handover in Internet of Vehicles. International Journal on Smart Sensing and Intelligent Systems, 14(1): 1-16. https://doi.org/10.21307/IJSSIS-2021-012
[46] Mouassa, S., Althobaiti, A., Jurado, F., Ghoneim, S.S.M. (2022). Novel design of slim mould optimizer for the solution of optimal power flow problems incorporating intermittent sources: A case study of Algerian electricity grid. IEEE Access, 10: 22646-22661. https://doi.org/10.1109/ACCESS.2022.3152557
[47] Abdel-Basset, M., Mohamed, R., Abouhawwash, M., Chakrabortty, R.K., Ryan, M.J., Nam, Y. (2021). An improved jellyfish algorithm for multilevel thresholding of magnetic resonance brain image segmentations. Computers, Materials and Continua, 68(3): 2961-2977. https://doi.org/10.32604/cmc.2021.016956
[48] Akanksha, E., Sharma, N., Gulati, K. (2021). OPNN: optimized probabilistic neural network based automatic detection of maize plant disease detection. Proceedings of the 6th International Conference on Inventive Computation Technologies, ICICT 2021, pp. 1322-1328. https://doi.org/10.1109/ICICT50816.2021.9358763
[49] Abdulnasser, G., Ali, A., Mohamed, E.E.M. (2021). Optimal planning of distributed generation and capacitor banks in distribution networks. 22nd International Middle East Power Systems Conference (MEPCON), pp. 619-624. https://doi.org/10.1109/MEPCON50283.2021.9686260
[50] Barshandeh, S., Dana, R., Eskandarian, P. (2022). A learning automata-based hybrid MPA and JS algorithm for numerical optimization problems and its application on data clustering. Knowledge-Based Systems, 236: 107682. https://doi.org/10.1016/j.knosys.2021.107682