Li Fu
© 2024 The author. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This article presents a new control approach for the optimal and reliable operation of the microbial fuel cell, as one of the most important sources of renewable energy. Considering several adverse effects on the performance of the microbial fuel cell, including the effects of uncertainty, disturbance, and of course, taking into account the nonlinear dynamics and the necessary conditions for the stable and optimal operation of the fuel cell, this paper presents a novel robust hybrid approach to its performance management. The innovative approach by using adaptive and sliding mode techniques, by focusing on providing a theoretical solution and not changing the structure of the fuel cell, reduces and suppresses the effects of disturbance and uncertainty of the model, and by guaranteeing the stable and reliable operation of the microbial fuel cell in the Lyapunov concept, provides rapid regulation of system states. The results of simulation and comparison in the MATLAB environment show the efficiency and optimal performance of the fuel cell system under the planned control method from the perspective of improving the transient and permanent response.
microbial fuel cell, renewable energy, uncertainty, disturbances, nonlinear model, sliding mode, adaptive control, robust control
Population growth and technological advances have led to an exponential increase in the use of fossil fuels, resulting in global warming and damaging environmental consequences and in such a situation, the only reasonable approach is to develop renewable energy technology and increase the share of this type of energy in the total energy portfolio through technological advances and investment [1-4].
In addition to reducing reliance on fossil fuels, renewable energies provide countless benefits such as higher grid reliability and flexibility, reduced emissions, and widespread access in remote areas and affordability has also been added to these benefits due to technological advances in recent years [5-7]. In addition to the mentioned cases, it is very necessary and vital to mention that today's human society has no choice but to move in the direction of clean and renewable energies due to severe climate changes and its severe paralyzing changes on daily life, although the cost of investing in such technologies is higher than the energy obtained from fossil fuels. All the mentioned cases explain well the need to develop renewable energy systems and especially the management of this type of energy by developing the required parallel structures [8-9].
Currently, various types of renewable energy are being developed on a commercial scale, among which we can mention solar energy, wind energy, biomass, ocean energy, and combined renewable sources [10-12]. The most important feature of renewable energies is their intermittent nature and continuous changes due to changes in their sources [13, 14]. One of the most important renewable technologies, which is also the main subject of this study, is the microbial fuel cell or MFC. This technology is capable of purifying wastewater at the same time as producing energy, and this unique feature has caused the increasing development of this technology [15]. In this regard, comprehensive studies have been conducted on MFC. Converting chemical energy stored in biodegradable organic materials into electricity using MFCs [16-19] and the use of MFCs for wastewater treatment by direct conversion of organic materials from various effluents and simultaneous energy production is one of the valuable studies in this field [20-22].
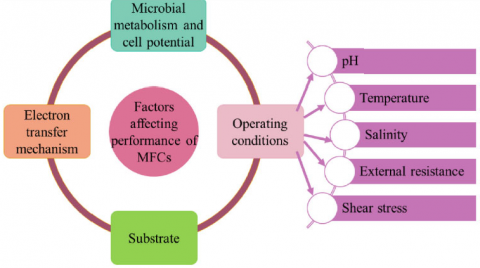
So far, various types of MFC have been proposed and built, for instance Single-chamber MFCs including cubes [23], side-arm bottles [24], tubular shapes [25], and up-flow MFCs [26], Dual-chamber MFCs where two components are separated by a membrane, containing H-type [27], cube-type [28], flat-plat type [29], miniature [30], and tubular MFCs [25, 31] (are the most important types of MFCs. The performance and efficiency of MFC depends on many factors including design [32], electrolyte pH, electrolyte temperature [33], the configuration of electrodes [34], substrates [35], mediators [36], membranes [37], biofilm formation [38], and type of wastewater [39] and a general schematic of these main factors are shown in Figure 1.
The evaluation of the influencing factors on the performance and efficiency of MFC in energy production and wastewater treatment shows the fact that most of the improvement approaches should be in line with changing the structure and configuration and of course choosing the right materials for different components of MFC. But adopting such an approach should not lead to the sterilization of other corrective solutions to improve fuel cell performance and one of the most important and efficient solutions is the design and selection of suitable controllers to achieve stable and optimal performance of the microbial fuel cell and especially the working fuel cell systems. In this regard, although few studies have been done [40-42], but the approach of this study is to overcome the shortcomings of previous studies in order to realize the optimum performance of the fuel cell as much as possible. Based on this, the necessity of this study and its special innovations have been fully explained.
Figure 1. Factors affecting the performance of MFC
In many physical and practical systems, external disturbances are considered as one of the calamities entering these systems and cause operational system errors and faults. Microbial fuel cell cells are not exempt from this rule, and therefore the first concern of this study is to provide a suitable control approach to eliminate the destructive effects of this adversity and ensure the optimal operation of the microbial fuel cell despite the presence of disturbances. The second factor with a destructive effect on the performance of the fuel cell that has been evaluated in this study is the adversity caused by imprecise models, or in better words, uncertainty. This factor which is caused by the environmental conditions of the fuel cell operation and the continuous changes around it, is an important factor affecting the optimal operation of the fuel cell and it is necessary to cover its effects with an appropriate approach and attitude. Therefore, covering the high influencing factors along with guaranteeing the proper energy output and of course promising the proper functioning of the microbial fuel cell form the main necessities of the study.
To achieve the above goals, several studies have been conducted by Hashem Imani and his colleagues [43, 44], but each of them has weaknesses. Although the work done in [45] has shown good performance, it will certainly not show good performance at critical times due to the non-resistive nature of the predictive controller. The control methods that are used in the articles [46, 47] only guarantee the stability of the operation and not its optimal state, and in this respect, they have structural shortcomings. The control methods of adaptive backstepping and nonlinear adaptive, which are used in the articles [48, 49], are not able to guarantee the optimal performance of MFC in the presence of twin uncertainty and disturbance adversities and therefore, it is necessary to use appropriate and innovative control methods to cover uncertainty and disturbance effects and ensure optimal operation.
Among the robust control methods, two sliding mode and adaptive techniques have the most attention and attraction. These methods are the most important robust approaches for uncertain and disturbed systems due to their simplicity of design and implementation, robust nature, and of course the guarantee of Lyapunov stability. Due to the numerous advantages of the adaptive method that has the ability to cover uncertainty effects with an unknown upper limit and the sliding mode scheme which is a robust approach for covering of disturbance effects, the combination of these two procedures has been used to simultaneously cover the effects of disturbance and uncertainty, guarantee optimal operation and, of course, guarantee robust and stable operation of MFC in the concept of Lyapunov. Therefore, the most important innovations of this study are:
1-Considering the nonlinear microbial fuel cell model with single chamber two-population
2-Applying a robust combined control method to the MFC.
3-Design of a novel robust adaptive sliding controller for MFC system by combination of adaptive and sliding mode techniques.
4-Active suppression of uncertainty and disturbance effects.
5-Improving the transient and steady state dynamic response of the MFC system.
Based on this, this article consists of the following parts:
In the second part, the microbial fuel cell system model is described in the state space. The design of the innovative control method is explained in the third part, and the results of the simulation and comparison are given in the fourth part. The fifth section also draws conclusions and directions for future studies.
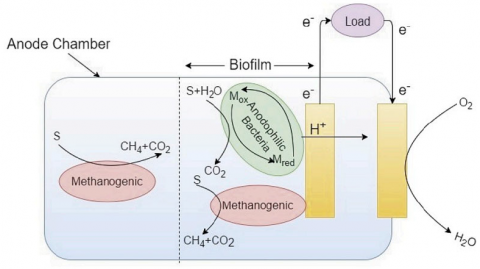
In the previous part, the main and important structures of MFC were described in general. Most of these structures are being built and developed for commercialization, although a few have reached the commercial and operational stage. According to the approach of this study, which aims to optimize the performance of the fuel cell system theoretically and not structural reforms, the first step in this direction is to determine and use a suitable working model to accurately describe the dynamics of the microbial fuel cell system. The schematic of a single-chamber microbial fuel cell with two populations is shown in Figure 2. The main blocks of a fuel cell are the substrate, membrane, bacterial species, cathode and anode, and of course, bacteria play the role of facilitating the transfer of electrons from the anode. After the transfer of the electron to the cathode through an external electrical connection and the combination of protons and electrons, both power extraction and wastewater treatment occur. In the anode space, the scattering of bacterial species is uniform. In addition, the operating temperature and pH value remain sensibly unchanged. Detailed mathematical modeling, chemical reaction and dynamics of the MFC system and of course the considered assumptions are explained in references [50, 51].
In the following, the model of the microbial fuel cell system with two populations is described. According to the approach of this study, a control-oriented model in the state space is presented for this purpose. In the mentioned model, some simplifying assumptions have been considered, but don't have effect on the efficiency of the innovative control technique. Full description from the reference model. In anode compartment, the distribution of bacterial species is uniform. Moreover, operational temperature and pH value remain reasonably unchanged. Any amount of transport of gas through the cathode element and substrate gradient in the biofilm are considered negligible during this process. Detailed mathematical modeling, chemical reaction and dynamics of the MFC system can be found in Refs. [25, 26]. This model has the ability to describe the exact dynamics of system states at any moment completely and online, and therefore it is a path-breaking and leading model for conducting control innovation.
Figure 2. Single-chamber microbial fuel cell with two populations
The dynamic equations of the microbial fuel cell system in the state space are in the form of following:
$\begin{gathered}\dot{x}_1=\theta_1 \frac{x_3}{k_a+x_3} x_1-k_a x_1-a_a d x_1 \\ \dot{x}_2=\theta_2 \frac{x_3}{k_\beta+x_3} x_2-k_d x_2-a_m d x_2 \\ \dot{x}_3=-k_1 \theta_1 \frac{x_3}{k_a+x_3} x_1-k_2 \theta_2 \frac{x_3}{k_\beta+x_3} x_2 \\ +d\left[u(t)-x_3\right]\end{gathered}$ (1)
Where $x_1$ and $x_2$ denote the anodophilic and methanogenic microorganisms concentration, and $x_3$ indicates the acetate concentration. Input $u$ denotes the influent substrate concentration and the dilution rate $d$ signifies the ratio of the input flow rate of substrate to the to the volume of the chamber containing the anode. Parameters $\theta_1$ and $\theta_2$ signify $\mu_{\text {max }, a}, r\left(M_o\right)$ and $\mu_{\max , m}$ respectively, where $r\left(M_o\right)$ is described as $\frac{M_o}{K_M+M_O}$ and assume that $M_o$ is available for measurement, $k_1$ and $k_2$ are the reciprocals of bacterial yield $Y_a$ and $Y_m$ respectivel. Also, the growth rate of anodophilic species be influenced by on the oxidized intracellular mediator concentration $\left(M_o\right)$. For more information on model parameters, the reader can refer to reference [50, 51].
In this part, the control approach to increase the efficiency of the microbial fuel cell operation and at the same time guarantee the stable operation is presented. For this purpose, according to the capabilities of sliding mode and adaptive methods [52-56], a novel combined adaptive sliding mode method has been designed.
Several components are considered for controller design. First, the dynamics of the system is non-linear. Therefore, linear controllers will not be able to meet the minimum requirements of this study. The second component is resistance to external disturbances. Like most physical systems, there are disturbances in the MFC system, and of course, due to the working environment, the occurrence of this calamity is inevitable. The third component is the uncertainty of modeling. For many reasons, including changes in system parameters such as the concentration of input materials and many other cases, there is a definite uncertainty on the obtained MFC model, and this component is the third most influential factor in the selection and design of the controller. Ensuring stable and correct process of the system and at the same time guaranteeing optimal operation are the next components that play a role in determining the control approach. Considering all the mentioned effective factors, it is necessary to select and design a non-linear robust control approach for the MFC system under study.
To deal with the uncertain effects of the model, especially in systems with slow dynamics (such as the MFC system under study), the best robust tactic is the adaptive approach. In order to deal with the effects of disturbance, the sliding mode approach is one of the best choices despite the bad effects of the chattering phenomenon. Taking into account the mentioned points and the requirements in relation to the design of the controller and of course the necessary features for a robust controller, this study presents a new hybrid robust control scheme using adaptive and sliding mode techniques to optimize the reliable operation of microbial fuel cell. In the following, the controller design steps are described in detail.
The MFC model introduced in Eq. (1) can be considered in a more general form (2):
$\dot{x}(t)=A x(t)+B u(t)+f(x(t))$ (2)
Where in this general class, the functions of $x(t), A, B$ and $f(x(t))$ for MFC are as follows:
$x(t)=\left[\begin{array}{l}x_1(t) \\ x_2(t) \\ x_3(t)\end{array}\right]$
$A=\left[\begin{array}{ccc}-k_a-a_a \mathrm{~d} & 0 & 0 \\ 0 & -k_d-a_m d & 0 \\ 0 & 0 & -d\end{array}\right], B=\left[\begin{array}{l}0 \\ 0 \\ d\end{array}\right]$,
$f(x(t))=\left[\begin{array}{c}\theta_1 \frac{x_3}{k_a+x_3} x_1 \\ \theta_2 \frac{x_3}{k_\beta+x_3} x_2 \\ -k_1 \theta_1 \frac{x_3}{k_a+x_3} x_1-k_2 \theta_2 \frac{x_3}{k_\beta+x_3} x_2\end{array}\right]$
The first step in designing a robust controller by combining adaptive and sliding mode techniques is the selection of the sliding or switching surface, which is chosen as follows.
$S\left(x_1, x_2, x_3\right)=x_1+x_2+x_3$ (3)
In the design of the sliding mode method, the following relationship must be satisfied on the switching surface:
$\frac{d S}{d t}=0$ (4)
By taking the derivative with respect to time from the Eq. (3), we have
$\dot{S}=x_1\left(\theta_1 \frac{x_3}{k_a+x_3} x_1-k_a x_1-a_a d x_1\right)+x_2\left(\theta_2 \frac{x_3}{k_\beta+x_3} x_2-k_d x_2\right.\left.-a_m d x_2\right)+x_3\left(-k_1 \theta_1 \frac{x_3}{k_a+x_3} x_1\right.-k_2 \theta_2 \frac{x_3}{k_\beta+x_3} x_2\left.+d\left[u(t)-x_3\right]\right)$ (5)
Eq. (5) expresses the time derivative of the switching level for the microbial fuel cell system, and by simplifying it becomes as Eq. (6).
$\dot{S}=-\left(k_a+a_a d\right) x_1^2-\left(k_d+a_m d\right) x_2^2-d x_3^2+x_1\left(\theta_1 \frac{x_3}{k_a+x_3} x_1\right)+x_2\left(\theta_2 \frac{x_3}{k_\beta+x_3} x_2\right)+x_3\left(-k_1 \theta_1 \frac{x_3}{k_a+x_3} x_1\right.-k_2 \theta_2 \frac{x_3}{k_\beta+x_3} x_2\left.+\left(d-\frac{1}{x_3}\right) u(t)\right)+u(t)=w(x, u)+u(t)$ (6)
where
$w(x, u)=-\left(k_a+a_a d\right) x_1^2-\left(k_d+a_m d\right) x_2^2-d x_3^2+x_1\left(\theta_1 \frac{x_3}{k_a+x_3} x_1\right)+x_2\left(\theta_2 \frac{x_3}{k_\beta+x_3} x_2\right)+x_3\left(-k_1 \theta_1 \frac{x_3}{k_a+x_3} x_1\right.-k_2 \theta_2 \frac{x_3}{k_\beta+x_3} x_2\left.+\left(d-\frac{1}{x_3}\right) u(t)\right)$ (7)
Now, in order to guarantee the stability and to design a suitable control signal, the Lyapunov stability criterion has been used. The control signal designed from this path must be able to satisfy all the control objectives. Lyapanov's candidate function is selected as Eq. (8).
$V=\frac{1}{2} S^2+\frac{1}{2 \lambda} \widetilde{W}^2$ (8)
In Eq. (8), $\lambda$ is the design parameter obtained from the adaptive rule and of course $\widetilde{W}$ is also the error between $w$ and $\widehat{w}$ hat and is defined as follows:
$|w(x, v, u)|<W$ (9)
where $w(x, v, u)$ represents disturbances and is placed inside a bundle with an uncertain upper limit of $W$, and of course we have considered $\widehat{W}$ as an estimate of that upper limit.
Now, to guarantee stability in Lyapunov's concept, it is necessary that its derivative be negative definite or negative semi-definite. For this purpose, it is obtained by deriving the function $V$.
$\dot{V}=S \dot{S}-\frac{1}{\lambda} \tilde{W} \dot{\widehat{W}}$ (10)
In Eq. (10), instead of $\dot{S}$, its equivalent, $(w(x, u)+u)$, can be used. It is obtained by placement.
$\dot{V}=S(w(x, u)+u)-\frac{1}{\lambda} \widetilde{W} \dot{\widehat{W}}$ (11)
Now, to select the sliding mode control signal, we use the signf unction in the rule in the form of (12).
$u=-k \operatorname{sign}(S)-\widehat{W}$ (12)
Substituting Eq. (12) into equation (11) gives a better view of the terms in the derivative of $V$.
$\dot{V}=-k S \operatorname{sign}(S)+S(w(x, u)+\widehat{W})-\frac{1}{\lambda} \widetilde{W} \dot{\widehat{W}}$ (13)
According to Eq. (13), Eq. (14) can be rewritten as follows
$\dot{V} \leq-k|S|+S(W-\widehat{W})-\frac{1}{\lambda} \widetilde{W} \dot{\widehat{W}}$ (14)
Now, the adaptive control method should be included to ensure stability in the controller design. For this purpose, by rewriting Eq. (13) as follows,
$\dot{V} \leq-k|S|+\widetilde{W}\left(S-\frac{1}{\lambda} \dot{\widehat{W}}\right)$ (15)
We can find that in order to eliminate the adaptive error $\widetilde{W}$, its coefficient must be zero. For this purpose, the adaptive law is obtained as follows
$\dot{\widehat{W}}=\lambda S$ (16)
The placement of the obtained control signal guarantees the stability of the microbial fuel cell system in the Lyapunov concept.
$\dot{V} \leq-k|S|$ (17)
Eq. (17) shows that under the control signal of Eq. (12) and using the adaptive law (16), the closed-loop system is stable and the achievement of control objectives is guaranteed. In the next section, simulation in MATLAB environment will be used to show the controller capability.
This part describes the results of the implementation of the proposed method on the microbial fuel cell system under study. The specifications of the selected fuel cell are similar to the reference [45], and of course, for better analysis and evaluation, the results obtained from using the planned method have been compared with the nonlinear adaptive and LMI-MPC methods from references [45, 49].
The simulation was carried out in the 2018a MATLAB simulation environment using a HP Laptop Intel Core i71065G7 8GB DDR4 RAM 512GB SSD. The simulation scenario is similar to [45] and is considered for the worst possible case, i.e. it is assumed that the uncertainty of $\theta_1$ and $\theta_2$ parameters will occur as follows:
$\begin{aligned} & \theta_1=\left\{\begin{array}{l}0.5 \quad \text { if } t>2 \\ 1.4 \quad \text { otherwise }\end{array}\right. \\ & \theta_2=\left\{\begin{array}{l}0.3 \text { if } t>2 \\ 0.1 \quad \text { otherwise }\end{array}\right.\end{aligned}$ (18)
By trial and error, Ka and Lambda control parameters were selected as follows, and of course, they can be optimally selected with meta-heuristic methods.
$k=10^{-3}, \lambda=10^{-4}$ (19)
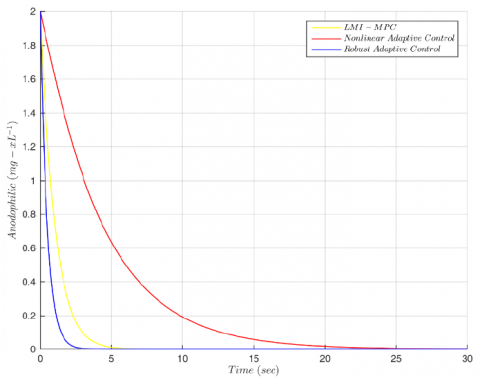
Now, the results of the implementation of control methods are shown in Figures 3, 4 and 5. Figure 3 shows $x_1$ state or Anodophilic. As it is clear from Figure 3, the regulatory action and reaching the equilibrium point occurs as quickly as possible under the projected robust adaptive controller and of course, the LMI-MPC technique performs the control process in a similar way and only in more time. The nonlinear adaptive method introduced in the [49], although it is able to perform regulation, but its performance in terms of time and quality is not comparable to the two proposed robust adaptive and LMIMPC methods.
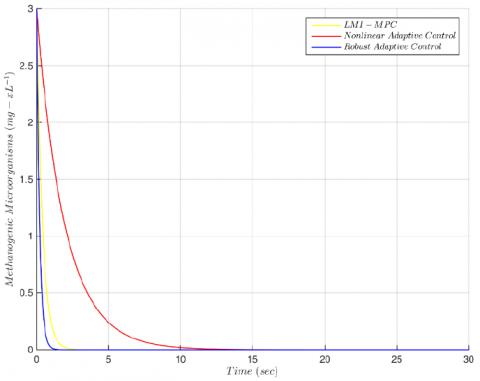
Figure 4 also shows the state of $x_2$ or Methanogenic Microorganisms. The performance of the controllers on the $x_2$ state is exactly the same as their performance on the $x_1$ state, and the behavior of the $x_2$ state is exactly the same as the $x_1$ state. It is important to note that in the $x_2$ state, all controllers are able to perform regulation and achieve the control goal in less than 15 seconds, and of course, the proposed adaptive and LMI-MPC techniques have performed the regulatory action in about two seconds.
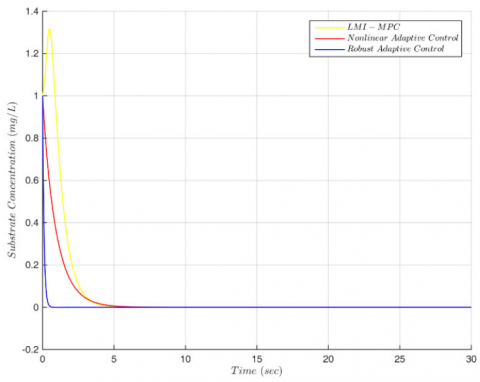
Figure 5 also shows the behavior of the $x_3$ state or the Substrate Concentration under the three control methods used in this study. From this figure, it is clear that the fastest regulatory with the best stable response and the shortest settling time occurs under the proposed adaptive method, and the $x_3$ state also reaches its equilibrium value in the fastest possible time. Unlike $x_1$ and $x_2$ states, LMI-MPC and nonlinear adaptive methods are able to perform the regulatory action of $x_3$ state in almost the same time and at the same speed, and of course, it is important to mention that under the LMI-MPC method, the state of the system initially moves away from its equilibrium value, and then with the passage of time, the regulatory action takes place. All three Figures 3, 4 and 5 show that the lowest settling time, the highest regulatory speed, the stability of the states and the lowest regulatory error of all states are obtained by applying the planned robust adaptive control method and LMI-MPC and non-linear adaptive methods are placed in the next ranks, respectively.
Figure 3. Trajectory of $x_1$ state or Anodophilic under three robust adaptive (planned), LMI-MPC and nonlinear adaptive control methods
Figure 4. Trajectory of $x_2$ state or Methanogenic Microorganisms under three robust adaptive (planned), LMIMPC and nonlinear adaptive control methods
As it can be seen from the above Figures, the planned robust adaptive control scheme is able to reduce the effects of disasters and track the desired functional values in the fastest possible time, and it shows a much higher ability than the other two techniques for improving the transient and lasting response. For a better understanding of this concept, the regulatory error values obtained from the application of control methods, according to the definition of error criteria, are given in Table 1. The definition of error criteria used for this study are ISE (integral square error), IAE (integral absolute error), ITSE (integral time square error) and ITAE (integral time absolute error).
Figure 5. Trajectory of $x_3$ state or the Substrate Concentration under three robust adaptive (planned), LMIMPC and nonlinear adaptive control methods
Table 1. Error values of fuel cell system states under three robust adaptive (planned), LMI-MPC and nonlinear adaptive control methods
|
Controllers |
State |
ISE |
IAE |
ITSE |
ITAE |
|
Robust Adaptive Control |
$x_1$ |
0.9894 |
0.9854 |
0.2430 |
0.4832 |
|
$x_2$ |
0.8975 |
0.5983 |
0.0895 |
0.1193 |
|
|
$x_3$ |
0.0495 |
0.1037 |
0.0025 |
0.0854 |
|
|
|
$x_1$ |
8.9555 |
8.7089 |
19.1430 |
36.5688 |
|
Nonlinear Adaptive Control |
$x_2$ |
8.6535 |
5.8522 |
8.5180 |
11.6213 |
|
$x_3$ |
0.4606 |
0.9413 |
0.2190 |
0.9137 |
|
|
LMI MPC |
$x_1$ |
2.0540 |
2.0266 |
1.0416 |
2.0039 |
|
$x_2$ |
1.7773 |
1.1847 |
0.3508 |
0.4677 |
|
|
$x_3$ |
1.6079 |
1.7821 |
1.0314 |
1.6604 |
As it is clear from Table 1, the error values obtained underthe application of the planned robust adaptive technique are significantly lower than the error values obtained from non- linear adaptive and LMI-MPC methods and this huge error difference is clear and obvious from the point of view of all four defined error criteria.
This study aimed to optimize the performance of the microbial fuel cell system in the conditions of disturbance and uncertainty presence. Considering the destructive effects of disturbance elements as well as the serious impact of environmental changes on the accuracy of the model, the design of a robust control approach was presented to mitigate these effects. Bearing in mind the completely non-linear dynamics of the microbial fuel cell, which is affected by chemical reactions, plus the concentration and density of materials and microorganisms for energy production and wastewater treatment, this paper presented a novel robust adaptive control method by utilizing the capabilities of adaptive and sliding mode techniques. In order to guarantee the stability and to assurance the extraction of more power from the fuel cell, adaptive and sliding mode robust techniques were used in a combined scheme and along with guaranteeing stability, overcoming adversities caused by uncertainty and disturbance effects were also met. The simulation results showed the high skill and ability of the planned method in meeting the control objectives and improving the transient and permanent responses of the system states. Optimizing the selection of controller parameters by meta-heuristic and inventive methods along with considering the effects of noise and of course practical limitations on the control signal can be a suitable path for future studies.
This work was financially supported by Scientific Research Project of Education Department of Jilin Province (Grant No. JJKH20230303KJ), and Research on Teaching Reform of Higher Education in Jilin Province (Grant No. JLJY202290776933).
[1] Gao, J., Gu, H., Yang, Y.W., Yuan, P., Poloei, H. (2022). Improve microbial fuel cell efficiency using receding horizon predictive control. Journal of New Materials for Electrochemical Systems, Vol. 25, No. 1, pp. 72-78. https://doi.org/10.14447/jnmes.v25i1.a10.
[2] Gu, H., Banki, T., Soleymani, A. (2023). Robust frequency control of additive manufacturing based microgrid considering delayed fuel cell dynamics. Journal of New Materials for Electrochemical Systems, Vol. 26, No. 4, pp. 304-311. https://doi.org/10.14447/jnmes.v26i4.a09
[3] Gao, J., Yang, Y.W., Gu, H. (2021). Improving the output power of PEM fuel cell with PI + ASM combined controller designed for boost converter. Journal of New Materials for Electrochemical Systems, Vol. 24, No. 4, pp. 261-269. https://doi.org/10.14447/jnmes.v24i4.a05
[4] Gu, H., Gao, J., Yang, Y.W., Fu, X.W. (2023). Fault detection of uncertain nonlinear additive manufacturing based single chamber two-population microbial fuel cell using adaptive observer based on linear matrix inequality. Journal of New Materials for Electrochemical Systems, Vol. 26, No. 1, pp. 26-31. https://doi.org/10.14447/jnmes.v26i1.a04
[5] Soto, E. A., Hernandez-Guzman, A., Vizcarrondo-Ortega, A., McNealey, A., & Bosman, L. B. (2022). Solar Energy Implementation for Health-Care Facilities in Developing and Underdeveloped Countries: Overview, Opportunities, and Challenges. Energies, 15(22), 8602, https://doi.org/10.3390/en15228602.
[6] Breyer, C., Khalili, S., Bogdanov, D., Ram, M., Oyewo, A. S., Aghahosseini, A., ... & Sovacool, B. K. (2022). On the history and future of 100% renewable energy systems research. IEEE Access, 10, 78176-78218, https://doi.org/10.1109/ACCESS.2022.3193402.
[7] Kaygusuz, K. A. M. İ. L. (2009). The role of hydropower for sustainable energy development. Energy Sources, Part B, 4(4), 365-376, https://doi.org/10.1080/15567240701756889.
[8] Yuan, Y., Wang, J., Yan, X., Shen, B., & Long, T.(2020). A review of multi-energy hybrid power system for ships. Renewable and Sustainable Energy Reviews, 132, 110081, https://doi.org/10.1016/j.rser.2020.110081.
[9] Zhang, Y., Huang, Z., Zou, B., & Bian, J. (2023). Conceptual design and analysis for a novel parallel configuration-type wave energy converter. Renewable Energy, 208, 627-644, https://doi.org/10.1016/j.renene.2023.03.086.
[10] Talaat, M., Farahat, M. A., & Elkholy, M. H. (2019). Renewable power integration: Experimental and simulation study to investigate the ability of integrating wave, solar and wind energies. Energy, 170, 668-682, https://doi.org/10.1016/j.energy.2018.12.171.
[11] Aleixandre-Tudó, J. L., Castelló-Cogollos, L., Aleixandre, J. L., & Aleixandre-Benavent, R. (2019). Renewable energies: Worldwide trends in research, funding and international collaboration. Renewable energy, 139, 268-278, https://doi.org/10.1016/j.renene.2019.02.079.
[12] Alrikabi, N. K. M. A. (2014). Renewable energy types. Journal of Clean Energy Technologies, 2(1), 61-64, DOI: 10.7763/JOCET.2016.V4.254.
[13] Liang, X. (2016). Emerging power quality challenges due to integration of renewable energy sources. IEEE Transactions on Industry Applications, 53(2), 855-866, https://doi.org/10.1109/TIA.2016.2626253 .
[14] Wang, H., Lei, Z., Zhang, X., Zhou, B., & Peng, J.(2019). A review of deep learning for renewable energy forecasting. Energy Conversion and Management, 198, 111799, https://doi.org/10.1016/j.enconman.2019.111799 .
[15] Li, M., Zhou, M., Tian, X., Tan, C., McDaniel, C. T., Hassett, D. J., & Gu, T. (2018). Microbial fuel cell (MFC) power performance improvement through enhanced microbial electrogenicity. Biotechnology advances, 36(4), 1316-1327. https://doi.org/10.1016/j.biotechadv.2018.04.010.
[16] Franks, A. E., & Nevin, K. P. (2010). Microbial fuel cells, a current review. Energies, 3(5), 899-919 https://doi.org/10.3390/en3050899, .
[17] Rahimnejad, M., Adhami, A., Darvari, S., Zirepour, A., & Oh, S. E. (2015). Microbial fuel cell as new technology for bioelectricity generation: A review. Alexandria Engineering Journal, 54(3), 745-756, https://doi.org/10.1016/j.aej.2015.03.031.
[18] Silveira, G., de Aquino Neto, S., & Schneedorf, J. M.(2020). Development, characterization and application of a low-cost single chamber microbial fuel cell based on hydraulic couplers. Energy, 208, 118395, https://doi.org/10.1016/j.energy.2020.118395.
[19] Ali, J., Wang, L., Waseem, H., Sharif, H. M. A., Djellabi, R., Zhang, C., & Pan, G. (2019). Bioelectrochemical recovery of silver from wastewater with sustainable power generation and its reuse for biofouling mitigation. Journal of Cleaner Production, 235, 1425-1437, https://doi.org/10.1016/j.jclepro.2019.07.065.
[20] Hwang, J. H., Kim, K. Y., Resurreccion, E. P., & Lee, W. H. (2019). Surfactant addition to enhance bioavailability of bilge water in single chamber microbial fuel cells (MFCs). Journal of hazardous materials, 368, 732-738, https://doi.org/10.1016/j.jhazmat.2019.02.007.
[21] Rathour, R., Patel, D., Shaikh, S., & Desai, C. (2019). Eco-electrogenic treatment of dyestuff wastewater using constructed wetland-microbial fuel cell system with an evaluation of electrode-enriched microbial community structures. Bioresource technology, 285, 121349, https://doi.org/10.1016/j.biortech.2019.121349.
[22] Nawaz, A., Raza, W., Gul, H., Durrani, A. K., Algethami, F. K., Sonne, C., & Kim, K. H. (2020). Upscaling feasibility of a graphite-based truncated conical microbial fuel cell for bioelectrogenesis through organic wastewater treatment. Journal of colloid and interface science, 570, 99-108, https://doi.org/10.1016/j.jcis.2020.02.099.
[23] Liu, B., Lei, Y., & Li, B. (2014). A batch-mode cube microbial fuel cell based “shock” biosensor for wastewater quality monitoring. Biosensors and Bioelectronics, 62, 308-314, https://doi.org/10.1016/j.bios.2014.06.051 .
[24] Logan, B., Cheng, S., Watson, V., & Estadt, G. (2007). Graphite fiber brush anodes for increased power production in air-cathode microbial fuel cells. Environmental science & technology, 41(9), 3341-3346, https://doi.org/10.1021/es062644y.
[25] Rabaey, K., Clauwaert, P., Aelterman, P., & Verstraete, W. (2005). Tubular microbial fuel cells for efficient electricity generation. Environmental science & technology, 39(20), 8077-8082, https://doi.org/10.1021/es050986i.
[26] Zhang, J. N., Zhao, Q. L., You, S. J., Jiang, J. Q., & Ren, N. Q. (2008). Continuous electricity production from leachate in a novel upflow air-cathode membrane-free microbial fuel cell. Water Science and Technology, 57(7), 1017-1021, https://doi.org/10.2166/wst.2008.063.
[27] Flimban, S. G., Ismail, I. M., Kim, T., & Oh, S. E. (2019). Overview of recent advancements in the microbial fuel cell from fundamentals to applications: Design, major elements, and scalability. Energies, 12(17), 3390, https://doi.org/10.3390/en12173390.
[28] Song, Y. C., Kim, D. S., Woo, J. H., Subha, B., Jang, S. H., & Sivakumar, S. (2015). Effect of surface modification of anode with surfactant on the performance of microbial fuel cell. International Journal of Energy Research, 39(6), 860-868, https://doi.org/10.1002/er.3284 .
[29] Min, B., & Logan, B. E. (2004). Continuous electricity generation from domestic wastewater and organic substrates in a flat plate microbial fuel cell. Environmental science & technology, 38(21), 5809-5814, https://doi.org/10.1021/es0491026 .
[30] Ringeisen, B. R., Ray, R., & Little, B. (2007). A miniature microbial fuel cell operating with an aerobic anode chamber. Journal of Power Sources, 165(2), 591-597, https://doi.org/10.1016/j.jpowsour.2006.10.026.
[31] Rabaey, K., & Verstraete, W. (2005). Microbial fuel cells: novel biotechnology for energy generation. TRENDS in Biotechnology, 23(6), 291-298, https://doi.org/10.1016/j.tibtech.2005.04.008 .
[32] Manohar, A. K., & Mansfeld, F. (2009). The internal resistance of a microbial fuel cell and its dependence on cell design and operating conditions. Electrochimica Acta, 54(6), 1664-1670, https://doi.org/10.1016/j.electacta.2008.06.047.
[33] Rozendal, R. A., Hamelers, H. V., & Buisman, C. J.(2006). Effects of membrane cation transport on pH and microbial fuel cell performance. Environmental science & technology, 40(17), 5206-5211, https://doi.org/10.1021/es060387r.
[34] Wei, J., Liang, P., & Huang, X. (2011). Recent progress in electrodes for microbial fuel cells. Bioresource technology, 102(20), 9335-9344, https://doi.org/10.1016/j.biortech.2011.07.019 .
[35] Pant, D., Van Bogaert, G., Diels, L., & Vanbroekhoven, K. (2010). A review of the substrates used in microbial fuel cells (MFCs) for sustainable energy production. Bioresource technology, 101(6), 1533-1543, https://doi.org/10.1016/j.biortech.2009.10.017 .
[36] Jang, J. K., Pham, T. H., Chang, I. S., Kang, K. H., Moon, H., Cho, K. S., & Kim, B. H. (2004). Construction and operation of a novel mediator-and membrane-less microbial fuel cell. Process biochemistry, 39(8), 1007-1012, https://doi.org/10.1016/S0032-9592(03)00203-6.
[37] Zhuang, L., Zhou, S., Li, Y., & Yuan, Y. (2010). Enhanced performance of air-cathode two-chamber microbial fuel cells with high-pH anode and low-pH cathode. Bioresource technology, 101(10), 3514-3519, https://doi.org/10.1016/j.biortech.2009.12.105.
[38] Cristiani, P., Carvalho, M. L., Guerrini, E., Daghio, M., Santoro, C., & Li, B. (2013). Cathodic and anodic biofilms in single chamber microbial fuel cells. Bioelectrochemistry, 92, 6-13, https://doi.org/10.1016/j.bioelechem.2013.01.005.
[39] Velasquez-Orta, S. B., Head, I. M., Curtis, T. P., & Scott, K. (2011). Factors affecting current production in microbial fuel cells using different industrial wastewaters. Bioresource technology, 102(8), 5105-5112, https://doi.org/10.1016/j.biortech.2011.01.059.
[40] Ma, F., Fu, C., Yang, J., & Yang, Q. (2020). Control strategy for adaptive active energy harvesting in sediment microbial fuel cells. Journal of Energy Engineering, 146(1), 04019034, https://doi.org/10.1061/(ASCE)EY.1943-7897.0000640.
[41] Yan, M., & Fan, L. (2013). Constant voltage output in two-chamber microbial fuel cell under fuzzy PID control. International Journal of Electrochemical Science, 8(3), 3321-3332, https://doi.org/10.1016/S1452-3981(23)14393-8.
[42] Fan, L., Zhang, J., & Shi, X. (2015). Performance improvement of a microbial fuel cell based on model predictive control. International Journal of Electrochemical Science, 10(1), 737-748, https://doi.org/10.1016/S1452-3981(23)05028-9 .
[43] Fu, L., Fu, X., & Imani Marrani, H. (2021). Robust adaptive fuzzy control for single-chamber single-population microbial fuel cell. Systems Science & Control Engineering, 9(1), 98-108, https://doi.org/10.1080/21642583.2020.1870580.
[44] Fu, L., Fu, X., & Imani Marrani, H. (2022). Finite Time Robust Controller Design for Microbial Fuel Cell in the Presence of Parametric Uncertainty. Journal of Electrical Engineering & Technology, 1-11, https://doi.org/10.1007/s42835-021-00919-x
[45] Gao, J., Gu, H., Yang, Y., Yuan, P., & Poloei, H. (2022). Improve microbial fuel cell efficiency using receding horizon predictive control. Journal of New Materials for Electrochemical Systems, 25(1), https://doi.org/10.14447/jnmes.v25i1.a10.
[46] Fu, X.W., Fu, L., Marrani, H.I. (2021). Stabilization of a single chamber single population microbial fuel cell by using of a novel nonlinear adaptive sliding mode control. Journal of New Materials for Electrochemical Systems, Vol. 24, No. 1, pp. 14-20. https://doi.org/10.14447/jnmes.v24i1.a03
[47] Fan, L., Zhang, J., & Shi, X. (2015). Performance improvement of a microbial fuel cell based on model predictive control. International Journal of Electrochemical Science, 10(1), 737-748, https://doi.org/10.1016/S1452-3981(23)05028-9.
[48] Patel, R., & Deb, D. (2018). Parametrized control- oriented mathematical model and adaptive backstepping control of a single chamber single population microbial fuel cell. Journal of Power Sources, 396, 599-605, https://doi.org/10.1016/j.jpowsour.2018.06.064.
[49] Patel, R., & Deb, D. (2019). Nonlinear adaptive control of microbial fuel cell with two species in a single chamber. Journal of Power Sources, 434, 226739, https://doi.org/10.1016/j.jpowsour.2019.226739.
[50] Patel, R., & Deb, D. (2017, October). Control-oriented parametrized models for microbial fuel cells. In 2017 6th International Conference on Computer Applications In Electrical Engineering-Recent Advances (CERA) (pp. 152-157). IEEE, https://doi.org/10.1109/CERA.2017.8343318.
[51] Patel, R., Deb, D., Dey, R., & Balas, V. E. (2020). Adaptive and intelligent control of microbial fuel cells. Cham, Switzerland: Springer International Publishing, https://doi.org/10.1007/978-3-030-18068-3.
[52] Li, B., Guan, T., Guan, X., Zhang, K., & Yiu, K. C. (2023). Optimal Fixed-Time Sliding Mode Control for Spacecraft Constrained Reorientation. IEEE Transactions on Automatic Control. https://doi.org/10.1109/TAC.2023.3341975
[53] Tan, J., Zhang, K., Li, B., & Wu, A. (2023). Event- Triggered Sliding Mode Control for Spacecraft Reorientation With Multiple Attitude Constraints. IEEE Transactions on Aerospace and Electronic Systems, 59(5), 6031-6043. https://doi.org/10.1109/TAES.2023.3270391
[54] Xu, B., Wang, X., Zhang, J., Guo, Y., & Razzaqi, A. A. (2022). A novel adaptive filtering for cooperative localization under compass failure and non-gaussian noise. IEEE Transactions on Vehicular Technology, 71(4), 3737-3749. https://doi.org/10.1109/TVT.2022.3145095
[55] Lu, Y., Tan, C., Ge, W., Zhao, Y., & Wang, G. (2023). Adaptive disturbance observer-based improved super-twisting sliding mode control for electromagnetic direct-drive pump. Smart Materials and Structures, 32(1), 17001. https://doi.org/10.1088/1361-665X/aca84e
[56] Feng, J., Wang, W., & Zeng, H. (2024). Integral Sliding Mode Control for a Class of Nonlinear Multi- Agent Systems With Multiple Time-Varying Delays. IEEE Access, 12, 10512-10520. https://doi.org/10.1109/ACCESS.2024.3354030 (Grant No. JLJY202290776933).