Sri Wahyuni*![]() | Muhammad Fuad
| Muhammad Fuad![]() | Yonathan Ferry Hendrawan
| Yonathan Ferry Hendrawan![]() | Faikul Umam
| Faikul Umam![]() | Junaidi
| Junaidi![]() | Lailatus Sya’diyah | Vivi Tri Widyaningrum
| Lailatus Sya’diyah | Vivi Tri Widyaningrum![]()
© 2026 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Evacuate task is one of the crucial applications for mobile robots in the human environment. This field of research involved the fundamental problem of path planning to provide an efficient and smooth path to guide the robot from the entry position to one or several victims and finally to the exit location. This research aims to develop a novel path planning-smoothing method for generating evacuation paths in accessible Search-and-Rescue (SAR) environments for non-holonomic mobile robots. This paper presents a modified, rapidly-explored random tree (RRT) with the virtual robot. This paper introduces a novel modification of the RRT algorithm that incorporates a virtual Ackermann-steering mobile robot to improve path smoothness and efficiency. The RRT path consists of several sharp turns tracked by a virtual mobile robot with an Ackermann-steering kinematics model. The trace of this virtual agent transforms sharp turns into smoother, more navigable paths, making them suitable for non-holonomic mobile robots in structured environments. The proposed path planning-smoothing method produced a more efficient distance magnitude than the path of previous studies. The virtual Ackermann-steering mobile robot-based modified RRT successfully shortened the path and improved its smoothness.
non-holonomic mobile robots, rapidly-explored random tree, evacuate path, evacuation navigation, virtual Ackermann-steering kinematics
Mobile robots play a significant role in supporting humans in their daily activities, particularly in hazardous environments. In diseased zones, these robots offer critical services such as transporting logistics, monitoring support, and performing disinfection tasks [1]. The robot executes these services with human operator supervision or is accomplished fully autonomously by the robot itself. These services can be performed under human supervision or autonomously. Robots capable of fully autonomous operations are known as Autonomous Mobile Robots (AMRs) [2]. Robots working in hospitals typically provide passive services, operating by waiting for patients to come to them. In contrast, Search-and-Rescue (SAR) robots actively seek out and save victims, providing crucial assistance in dangerous environments [3].
These SAR robots have some important applications in exploring a jeopardized environment. In civil domains, SARs were deployed to support SAR operations [4, 5]. SAR robots have been deployed in civil domains to support rescue operations, aiding in the rescue of humans and wild animals [6, 7]. They are especially useful in collapsed structures, as they can reach survivors in areas inaccessible to human rescue teams [8-11]. These robots are often required to seek the survivors in inaccessible areas that are hard for human rescue teams to explore, such as investigated in Robots in SAR environments must have suitable kinematics models to increase their manoeuvrability and efficiency to reach the victim [10, 11].
The effectiveness of SAR robots heavily depends on their kinematic models, which enhance maneuverability and efficiency. There are two main types of SAR robots based on kinematic constraints: holonomic and non-holonomic [12]. A kind of SAR used in rescue operations must be able to handle lateral slip. Non-holonomic SARs have the characteristic of taking slip in the lateral direction [13]. Non-holonomic SARs, which handle lateral slip, include differential steering robots and skid-steering robots. Differential steering robots are lightweight and simple but have issues with dynamic stability [14, 15]. Skid-steering robots, while excellent for rough terrain, consume high power during turns [6, 8, 9, 16]. Although this platform has good mobility for driving in rough-terrain, it requires high power usage when turning [16].
In some scenarios, the primary task of a SAR robot is to evacuate victims to safe areas, especially when direct rescue is not feasible [17]. To carry out the evacuation task, it is desirable to equip SAR with a simple medical kit. A SAR with the Ackermann-steering platform is chosen to transport heavy loads such as medical equipment. For such evacuation tasks, SAR robots equipped with simple medical kits are essential. Ackermann-steering platforms are particularly suitable for transporting heavy loads like medical equipment, as they reduce the transient rollover risk associated with heavy loads [18, 19]. Unlike other non-holonomic models, the Ackermann steering model has smoother and more stable movement characteristics due to its limited turning radius and continuous directional changes. These characteristics make the Ackermann model more suitable for evacuation tasks that require load stability and realistic vehicle behaviour representation, while reducing the risk of instability [18].
The critical first step in SAR evacuation operations is path planning [20]. In this function, SAR must plan a prudent and simplistic evacuation path from an entry position to every victim location. SAR robots must plan and execute efficient evacuation paths from entry points to victims and from victims to exits [21]. The evacuation path in the SAR environment must be followed easily by a SAR equipped with a medical kit. This research proposes a novel evacuation path planning and smoothing method based on the Ackerman-steering kinematic model and partial map for solving evacuation exploration in SAR structured environment by generating the shortest and smoothest path. These paths must be easily navigable by SAR robots equipped with medical kits. This research proposes a novel path planning and smoothing method using the Ackermann-steering kinematic model and partial maps. The goal is to generate the shortest and smoothest paths for SAR robots in structured environments. Once path planning is established, other navigation functions such as path following and map construction are necessary for successful execution [22, 23]. This study focuses on the first function of SAR navigation: path planning [24]. The aim is to develop a new method to create the shortest and smoothest paths, enhancing the efficiency of evacuation operations in accessible environments.
2.1 Relate work
A comprehensive survey on path planning for AMRs categorizes methods into reactive computing, soft computing, configuration-space (c-space) search, and optimal control [25]. Path planning for evacuation and general exploration tasks can be divided into two main problems based on the availability of environmental information and the timing of path planning: online and offline path planning [25, 26]. Online path planning addresses exploration tasks without prior environmental data [27], whereas offline path planning occurs with some pre-existing environmental information [28-32].
In scenarios where prior environmental data is available, paths can be generated to avoid static obstacles efficiently [33]. However, these paths are often difficult for non-holonomic mobile robots to follow [34]. Sample-based algorithms from the c-space search category are suitable for high-dimensional path planning. The Probabilistic Road Map (PRM) algorithm, for instance, has been used for path planning in environments with static obstacles [28] and for global path planning with non-linear moving objects [29, 35]. Modifications to PRM have included replacing constant distances between nodes with functions based on several node samples [30].
Each PRM version connects the initial and target positions through several transitional waypoints [36, 37]. The resulting paths often contain sharp angles that need smoothing for non-holonomic mobile robots to follow easily [38]. Previous research on emergency evacuation without robotic assistance has focused on handling static obstacles [31, 39]. Studies involving differential-steering mobile robots in evacuation processes have not thoroughly addressed path planning [32]. This study to develop a path planning-and-smoothing method for supporting search-and-evacuate navigation tasks, it inspired by [31, 32]. Reviews on previous research in offline path planning of mobile robots are summarized in Table 1. Path planning method, path smoothing availability, the objective of the robot task, type of obstacle, and kinematics model of the mobile robot are used as parameters in comparing several works on offline path planning in a structured environment.
Table 1. Reviews of offline path planning
|
Path Planning Method |
Path Smoothing |
The Objective of the Task |
Type of Obstacle |
Kinematics |
|
PRM [30] |
No |
Exploration |
Static |
Differential-steering |
|
PRM [31] |
No |
Exploration |
Static |
Differential-steering |
|
Modified PRM [32] |
No |
Exploration |
Static |
Differential-steering |
|
Cellular Ant Optimization [33] |
No |
Evacuation |
Static |
No kinematics |
From previous research, no study investigates path planning for solving search-evacuate paths in supporting search-rescue exploration [40]. This study aims to develop a sample-based algorithm to solve search-evacuate routes connecting several victims' locations to the safe exit position. This paper proposes a modified rapidly-explored random tree (RRT) [41] that grows with each victim being found to answer the challenge of planning a search-evacuate path. This paper introduces a virtual non-holonomic mobile robot with an Ackermann-steering kinematics model for smoothing the search-evacuate path to generate a path that is easy to follow by a non-holonomic SAR mobile robot.
2.2 The problem of evacuation navigation tasks in a structured environment
Evacuation involves relocating people from a jeopardized zone to a more secure area in response to an emergency [42]. In most disaster occurrences, a total loss of lives happens because of inappropriate evacuation tasks. Evacuation plays an essential role in saving lives from troubles that could occur [43]. To execute the evacuation task flawlessly, it is necessary to plan the evacuation plan. The evacuation plan generates a sequential waypoint with characteristics in the shortest and safest evacuation path from each victim's location to the secure area [44]. This path should be planned before a disaster happens and must be updated [45, 46]. In this study, the evacuation navigation task consists of locating several victim objects and guiding them to a more stable environment.
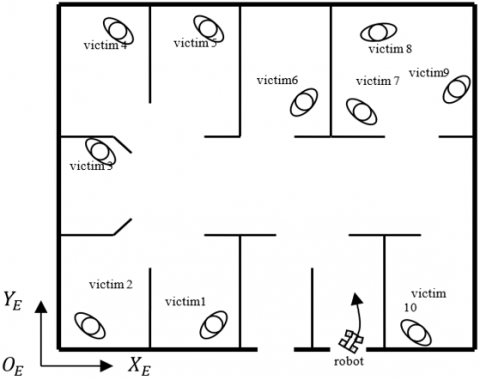
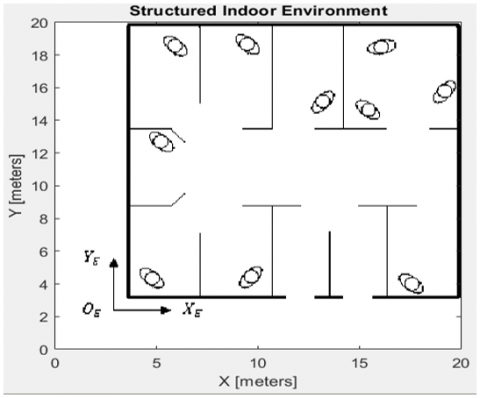
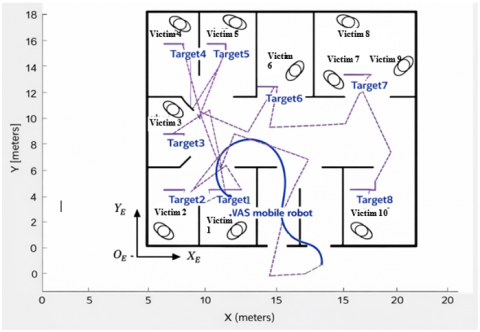
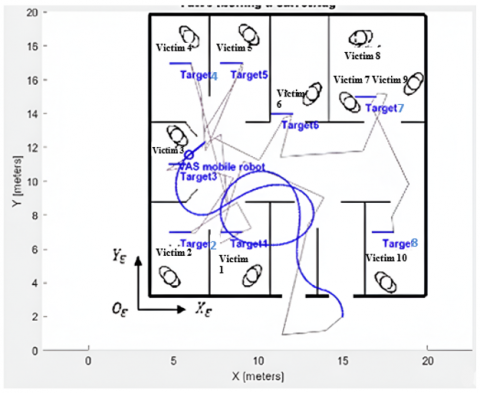
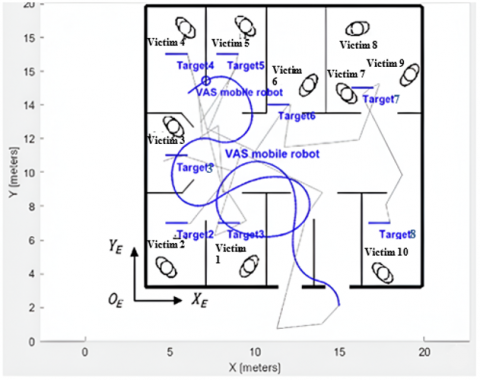
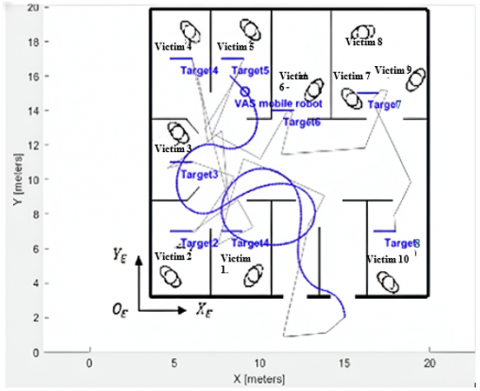
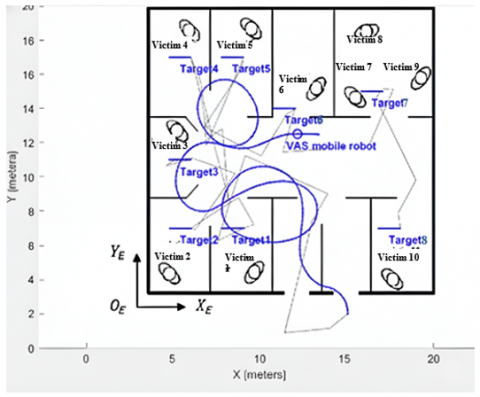
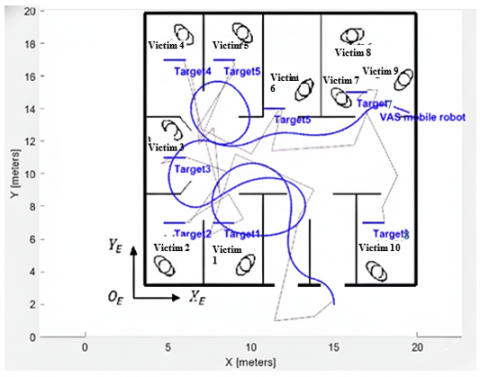
Figure 1 illustrates a situation when a mobile robot operates in an indoor structured environment that has several rooms and contains some possible people to be victims. Environment with structured configuration is represented in a cartesian coordinate system $\left\{O_E, X_E, Y_E\right\}$. There are ten possible persons to be victims that spread in several rooms. Each victim and robot are labelled. The arrow of the robot indicates the trajectory that guides it to each victim.
Figure 1. A Search-and-Rescue (SAR) mobile robot and some victims in an indoor structured environment
The robot has to evacuate several victims with spread locations to a specific defined safe target exit position. To save some lives in such an environment with a structured configuration, the robot must be supported by the ability to plan the evacuation path. The path for the guiding robot from the entry point to each victim and the exit point must be calculated to define the shortest and smoothest path to be followed by the SAR robot.
2.3 Path planning and smoothing using a modified rapidly-explored random tree with a partial map
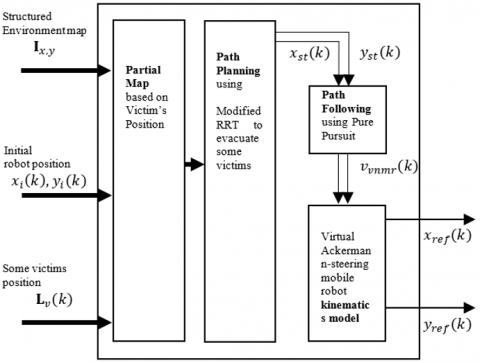
This research proposes a modified rapidly exploring random tree (RRT) based on the virtual non-holonomic mobile robot (VNMR). The design of the proposed method is presented in Figure 2. There are three subsystems in this proposed system, shown in Figure 2. These subsystems are path planning, path following, and virtual plant. The path planning subsystem creates the path connecting the robot's initial position to several victims and the exit point. This path is forced to comprise some sharp turns to connect these points within a short distance. To generate this guide path, this research modifies RRT to plan an entire route from the entry point to several victim positions and the exit location.
The next two subsystems are used for path smoothing. These subsystems involve path following and the kinematics model of the plant [47, 48]. The idea is to use a virtual non-holonomic mobile robot to follow the guidance path that still comprises the sharp turns. Path following function is implemented by using the Pure Pursuit algorithm. This method is applied to a selected virtual non-holonomic mobile robot kinematics model. Ackermann-steering [49] is chosen as the virtual non-holonomic mobile robot to transport heavy medical equipment in the real world [50].
This study improved the original RRT to have the ability to generate a path that interconnects some victim's positions from an entry point and to an exit point. The robot workspace based on the map of structured $\mathrm{I}_{x, y}$ is simplified through a partial map subsystem that utilizes the initial robot position $\left[x_i(k) \quad y_i(k)\right]^T$ and victim locations $\mathrm{L}_v(k)$. The partial map subsystem will divide the original structured map into several simpler map segments based on victim positions $\mathrm{L}_v(k)$. This is aimed at reducing the complexity of the RRT mapping, in order to enhancing the efficiency of RRT processing time. The map from partial results is subsequently utilized for executing path planning using a modified RRT. This early generated path of modified RRT still contained sharp turn $\left[\begin{array}{ll}x_{s t}(k) & y_{s t}(k)\end{array}\right]^T$ in each connected guided position. This sequence of positions that have a function to guide the robot is known as waypoints. The waypoints were used in Pure Pursuit of the following subsystem to generate linear and steering velocity commands $\left[\begin{array}{ll}v_{v n m r}(k) & \dot{\psi}_{v n m r}(k)\end{array}\right]^T$ to be executed by the virtual non-holonomic mobile robot. As a result of following the modified RRT path, this virtual robot left the trajectory $\left[\begin{array}{ll}x_{r e f}(k) & y_{r e f}(k)\end{array}\right]^T$ that forms the smooth path. This path was used for the real SAR mobile robot to guide evacuation navigation tasks in an accessible SAR environment.
Figure 2. The proposed path planning-smoothing based on a virtual non-holonomic mobile robot and partial map
2.4 Modified rapidly-explored random tree-based path planning
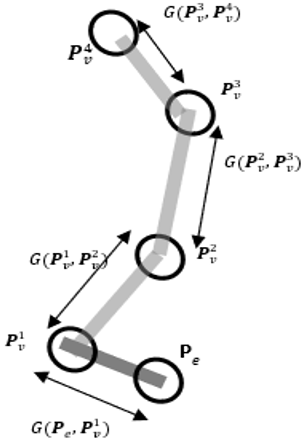
This research contributes by modifying RRT to construct the interconnection path to link some victim locations to entry/exit points with the shortest distance and no collision with static obstacles. The generated evacuation path results with respect to the objective function as follows:
$f(G)=g\left(P_e, P_v^1\right)+\sum_{i=2}^n g\left(P_v^{i-1}, P_v^i\right)$ (1)
where, objective function $f(G)$ minimizes the sum of gap distance $g()$ between entry/exit point $\mathrm{P}_e$ and some number of victim position $\mathrm{P}_v^i$. The total gap distance of the complete path of the modified RRT from entry/exit point $\mathrm{P}_e$ to several victim positions $\mathrm{P}_v^i$ is depicted in Figure 3. In this illustration, there are four victims with arbitrary positions that were known to the robot before the evacuation path planning based on modified RRT is executed. This study differs from previous research in considering several targets represented as victims. Based on this illustration, four gap distances exist between four pairs of initial target points. The gap distance of each pair $g\left(\mathrm{P}_v^{i-1}, \mathrm{P}_v^i\right)$ is computed by using Euclidean distance regarding the following objective function:
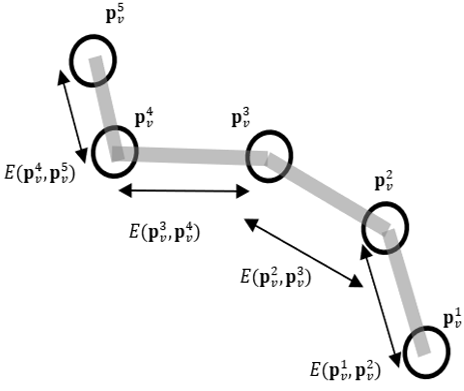
$f(g)=\sum_{j=1}^m E\left(\mathrm{p}_v^{j-1}, \mathrm{p}_v^j\right)$ (2)
where, objective function $f(g)$ minimizes the path between interval point $\mathrm{p}_v^j$, each pair of initial-target positions is connected by a path consisting of some arbitrary interval points $\mathrm{p}_v^j$, as illustrated in Figure 4.
Figure 3. Objective function implementations of modified rapidly-explored random tree (RRT) for evacuation path planning with four victims
Figure 4. The first pair of initial target points in the enlarged view
2.5 Pure pursuit-based path following
To smooth the generated RRT path that still contains sharp turns $\left[x_{s t}(k) \quad y_{s t}(k)\right]^T$, this study proposes using a virtual non-holonomic mobile robot to follow the path using a pure pursuit path with the following algorithm. Some parameters must be defined before the pure pursuit algorithm processes the sharp turns-contained RRT path. Three parameters of the pure pursuit algorithm are the distance of the look-ahead, the preferred linear velocity, and the highest angular velocity. The results of the pure pursuit algorithm are linear and angular velocities $\left[v_{v n m r}(k) \quad \dot{\psi}_{v n m r}(k)\right]^T$. These velocities are used to reach the forward point based on the virtual non-holonomic mobile robot's location and orientation.
2.6 Virtual non-holonomic mobile robot
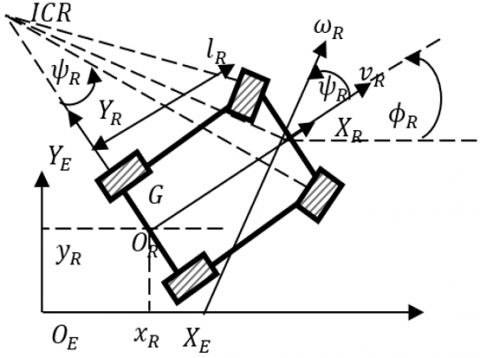
Using its kinematics model, the path-following algorithm guides the virtual non-holonomic mobile robot to move from the entry/exit point to each victim's location [51]. The Ackermann-steering mobile robot kinematics model is proposed in this study to navigate the evacuation task of several victims in an indoor, unstructured environment [52]. The kinematics configuration of the virtual Ackermann-steering mobile robot in the Cartesian coordinate system [53] is illustrated in Figure 5. The indoor structured environment is represented by an environment frame and symbolized with $\left\{O_E, X_E, Y_E\right\}$. The virtual non-holonomic mobile robot is depicted using the Ackermann-steering body frame [54] and denoted with $\left\{O_R, X_R, Y_R\right\}$.
Figure 5. The configuration of Ackermann-steering
The origin of the robot frame $O_R$ coincides with the middle of the rear wheel axis and overlaps with the center of mass $G$. The origin position of the robot frame relative to the environment frame describes the coordinate of the robot $\left[\begin{array}{ll}x_R & y_R\end{array}\right]^T$. The length of the wheelbase is represented by $l_R$. The virtual non-holonomic mobile robot moves with linear and steering wheel velocity $\left[v_R(k) \quad \omega_R(k)\right]^T$. The orientation and the steering angle of the virtual non-holonomic mobile robot are represented by $\phi_R$ and $\psi_R$, respectively.
The steering angle $\psi_R$ is used to turn its body with respect to the instantaneous center of rotation (ICR) [55]. The pose and its first derivatives of the virtual non-holonomic mobile robot are respectively expressed as follows:
$\mathrm{P}_R=\left[\begin{array}{llll}x_R & y_R & \phi_R & \psi_R\end{array}\right]^T$, (3)
$\dot{\mathrm{P}_R}=\left[\begin{array}{llll}\dot{x}_R & \dot{y}_R & \dot{\phi}_R & \dot{\psi}_R\end{array}\right]^T$ (4)
The rear-wheel driving Ackermann-steering [56] as the virtual non-holonomic mobile robot has a kinematics model as follows:
$\left[\begin{array}{c}\dot{x}_R \\ \dot{y}_R \\ \dot{\phi}_R \\ \dot{\psi}_R\end{array}\right]=\left[\begin{array}{cc}\cos \phi_R & 0 \\ \sin \phi_R & 0 \\ \tan \psi_R / l_R & 0 \\ 0 & 1\end{array}\right]\left[\begin{array}{c}v_R \\ \omega_R\end{array}\right]$ (5)
The next robot poses is $\mathrm{P}_R(k+1)$ determined by using the current pose $\mathrm{P}_R(k)$ and the velocities $\left[v_R(k) \quad \omega_R(k)\right]^T$ such as described as follows:
$\left[\begin{array}{l}x_R(k+1) \\ y_R(k+1) \\ \phi_R(k+1) \\ \psi_R(k+1)\end{array}\right]=\left[\begin{array}{l}x_R(k) \\ y_R(k) \\ \phi_R(k) \\ \psi_R(k)\end{array}\right]+k T\left[\begin{array}{c}v_R(k) \cos \phi_R \\ v_R(k) \sin \phi_{\quad R} \\ v_R(k) \tan \psi_R / l_R \\ \omega_R(k)\end{array}\right]$ (6)
2.7 Algorithm description, convergence analysis, and complexity
This process begins with the input structured environmental map data and known victim positions, then simplifying the map using a partial map strategy. This simplification aims to limit the search space so that path planning can be carried out more efficiently. Subsequently, a modified RRT algorithm as described in Section 2.6 is employed as global path planning by generating collision-free paths connecting the robot's entry point, victim locations, and the exit point. One of the characteristics of RRT is that the resulting global planning path still contains sharp turns, so it is smoothed using the Pure Pursuit algorithm implemented on a virtual non-holonomic robot. This process produces a smoother and kinematically feasible path, which is then used as the reference trajectory for victim evacuation.
In terms of convergence, the proposed method inherits the probabilistic completeness property of the RRT algorithm. With an increasing number of samples, the probability of finding a collision-free evacuation path will also increase. The modifications made in this study do not change the basic convergence property because they focus on the construction of the evacuation path.
Regarding computational complexity, the main computational load comes from the global path planning stage using RRT. The overall complexity is dominated by the sampling and tree expansion processes, while the path smoothing process using the Pure Pursuit algorithm only adds linear computational load. Therefore, this computational process does not have a significant effect on the overall complexity of the method.
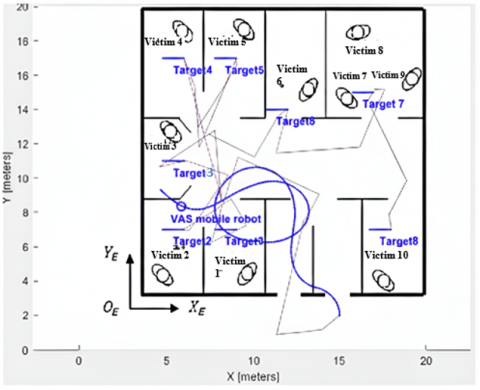
The effectiveness of the proposed path planning–smoothing method based on a modified RRT for a virtual non-holonomic mobile robot with an Ackermann-steering kinematics model (VNMR) [57-59] was evaluated through several simulation scenarios. The proposed approach was applied to a virtual mobile robot operating in a structured environment, as illustrated in Figure 6. The performance of the proposed method was then compared with that of the probabilistic roadmap (PRM) method applied to the same virtual mobile robot in the same environment. The corresponding simulation results are presented in the subsequent figures. All simulations were conducted in an indoor office environment with dimensions of 20 m × 20 m.
3.1 Path planning in a structured environment with modified-RRT and partial map
Initially, the mobile robot was set outside of the building. There are ten victims spread across several rooms inside the building, as illustrated in Figure 6.
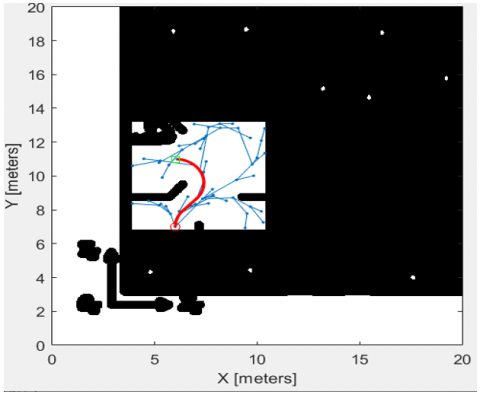
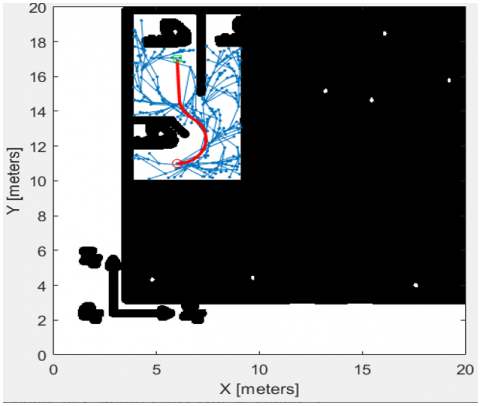
Before the simulation of the virtual mobile robot in a structured environment, the working area is divided so that the mobile robot can work optimally. The simulation is done with mobile robot movement and route planning from the starting point of room 1 to room 8. The beginning of the mobile robot movement starts in room 1, as illustrated in Figure 7.
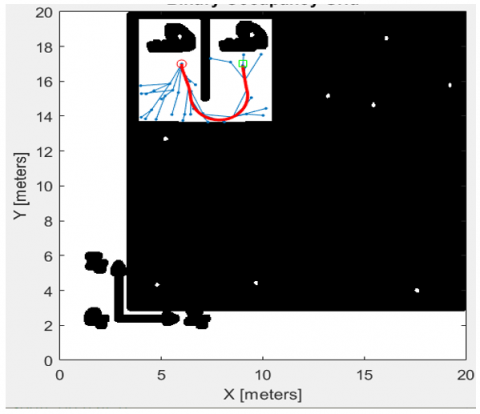
After moving from room 1, the mobile robot will move to room 2 to look for the victim. An illustration of the movement can be seen in Figure 8.
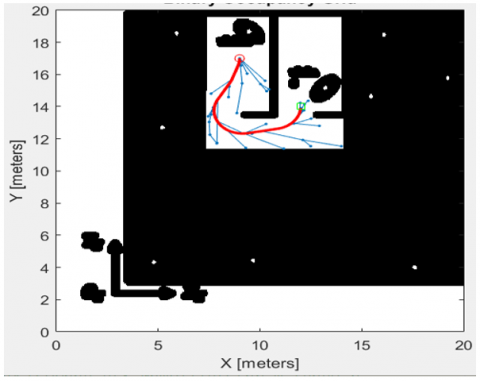
The mobile robot continues its movement from room 2 to room 3 in search of the other victims. An illustration for the simulation of mobile robot movement, like Figure 9.
Figure 6. The structured environment with several victims
Figure 7. Mobile robot moves into room 1
Figure 8. Mobile robot moves from room 1 to room 2
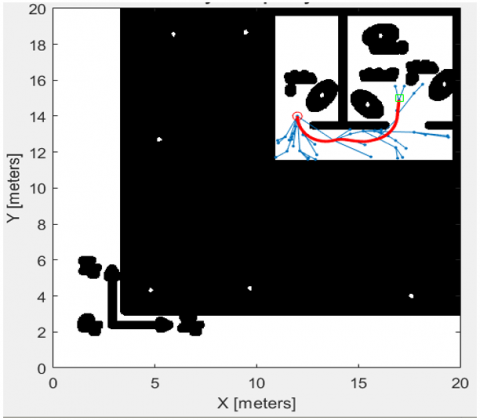
The mobile robot movement continued to look for the victims in room 4. An illustration of the movement of the robot is shown in Figure 10.
Next, the mobile robot will move from room 4 to room 5 to look for the next victim. Illustration of the mobile robot movement in Figure 11.
Figure 9. Robot mobile moves from room 2 to room 3
Figure 10. Mobile robot moves towards room 4
Figure 11. Robot mobile movement from room 4 to room 5
The advanced robot mobile moves looking for victims in room 6. An illustration of route planning and mobile robot movement, like Figure 12.
After searching for the victim in room 6, the mobile robot will proceed to search for victims in room 7 with a scheduled route. An illustration of the mobile robot movement is shown in Figure 13.
Figure 12. A mobile robot moves from room 5 to room 6
Figure 13. Mobile robot movement to find victims in room 7
Figure 14. Last mobile robot to find the victims
The last movement of the mobile robot in search of victims occurred in room 8. The mobile robot moves from room 7 to room 8. An illustration of the mobile robot movement, like Figure 14.
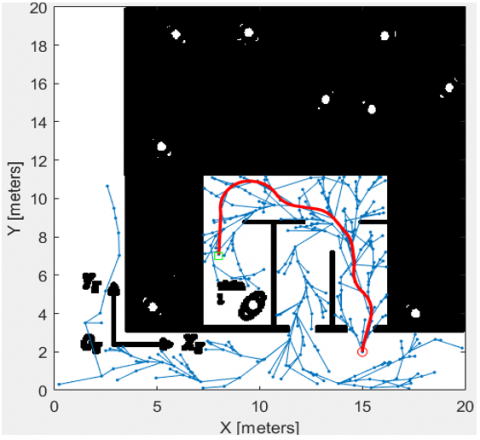
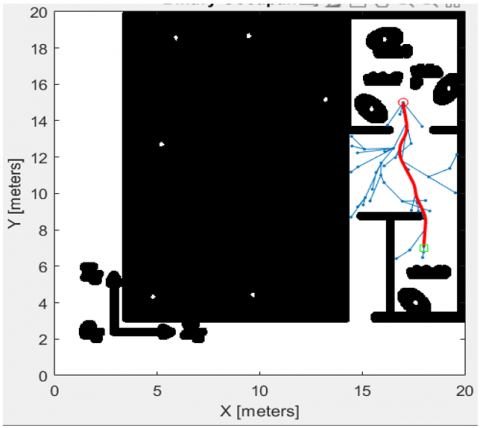
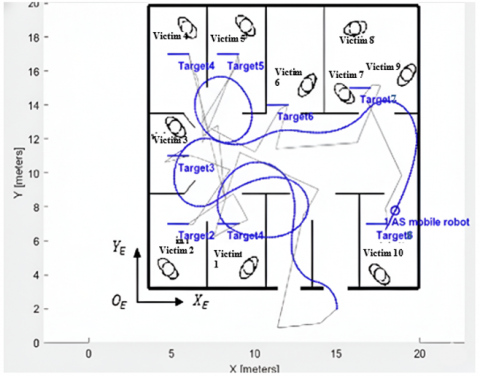
After the mobile robot moves to look for the victim in the structured room, it will then return to the starting point of room 8. An illustration for a mobile robot moving from room 8 to the start point that simultaneously displays the robot’s mobile path in carrying out the evacuation of the victims using the modified RRT algorithm as shown in Figure 15.
Figure 15. The mobile robot returns to the start point while showing a path for the evacuation of victims from room 1 to room 8
3.2 Path planning in a structured environment with probabilistic road map
Other simulations were performed using the PRM algorithm to compare the mobile robot movements in searching for victims in a structured environment [60]. The simulation was done using maps such as Figure 16. The mobile robot movement was performed in several steps.
Figure 16. Mobile robot movement from the starting point to room 1
Then the mobile robot moves from room 1 to room 2. When it moves towards the mobile robot, it still rotates, hitting obstacles to reach room 2. An illustration of the movement of the mobile robot from room 1 to room 2 is shown in Figure 17.
The mobile robot continues to search for victims from room 2 to room 3. Illustration as in Figure 18.
Then the mobile robot moves from room 3 to room 4 to search for victims, but when it moves to room 4, the mobile robot still approaches room 5. An illustration can be seen in Figure 19.
Figure 17. Mobile robot movement from room 1 to room 2
Figure 18. Movement of the mobile robot from room 2 to room 3
Figure 19. Movement of the mobile robot from room 3 to room 4
The mobile robot moves to room 5, which previously moved from room 3, because the mobile robot makes a rotating movement so that the mobile robot moves from room 3 to room 5, which should go to room 4, as illustrated in Figure 20.
Figure 20. Movement of the mobile robot from room 3 to room 5, which should go to room 4
Next, the mobile robot moves from room 4 to room 6 to search for the next victim, as illustrated in Figure 21.
Figure 21. Mobile robot movement from room 4 to room 6 to look for victims
The mobile robot will continue its movement from room 6 to room 7 to search for victims in room 7. Illustration of the movement of the robot car as shown in Figure 22.
Figure 22. Movement of the mobile robot from room 6 to room 7
The mobile robot will make its final movement to search for victims in room 8. When the mobile robot moves from room 7 to room 8, it is still rotating so that it hits an obstacle in the form of a wall. Illustration like Figure 23.
Figure 23. Movement of the mobile robot in searching for victims from room 7 to room 8
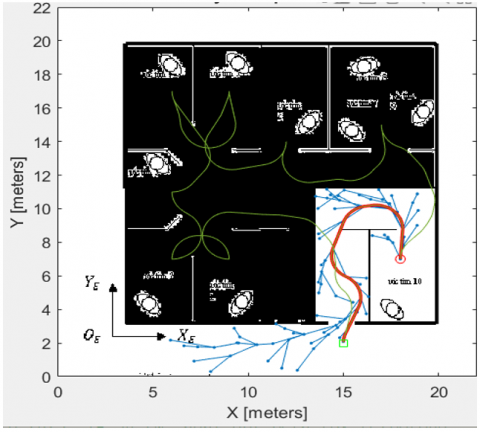
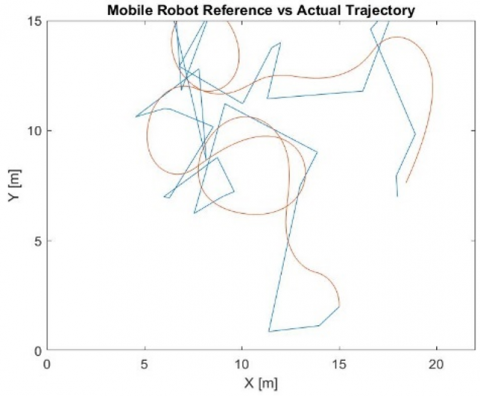
The following are the results of comparing the actual trajectory with the mobile robot reference trajectory, as illustrated in Figure 24.
Figure 24. Comparison results between the robot reference (blue) and the actual trajectory (red)
3.3 Quantitative performance evaluation
To complement the qualitative trajectory visualization, a quantitative comparison between the proposed modified RRT and the PRM method was conducted using four key metrics: path length, path smoothness, computational runtime, and collision occurrence. The evaluation was performed in the same structured indoor environment (20 m × 20 m) with identical victim configurations.
The results show that the modified RRT produces a shorter evacuation path, indicating higher navigation efficiency. Path smoothness is significantly improved, as reflected by the 63.1% reduction in curvature variation, confirming the effectiveness of the virtual Ackermann-steering-based smoothing process.
In terms of computational efficiency, the proposed method achieves a processing time reduction of 25.7% compared with PRM, as data presented in Table 2, due to the partial map strategy that limits the search space. Most importantly, no collisions were observed during the evacuation task, whereas PRM experienced multiple obstacle contacts, which may compromise safety in SAR operations.
Table 2. Quantitative comparison between modified rapidly-explored random tree (RRT) and Probabilistic Road Map (PRM)
|
Metric |
Modified RRT (VNMR) |
PRM |
Improvement |
|
Path length (m) |
92.4 |
118.7 |
22.1% |
|
Curvature variance (rad²/m²) |
0.031 |
0.084 |
63.1% |
|
Runtime (s) |
1.62 |
2.18 |
25.7% |
|
Number of collisions |
0 |
6 |
Eliminated |
Although this study focuses on comparison with PRM as a representative sample-based baseline, other RRT variants, such as RRT and Informed RRT, share similar piecewise-linear characteristics that require additional smoothing to be feasible for non-holonomic robots. Optimization-based smoothing methods, such as B-spline, typically improve geometric smoothness but do not explicitly account for Ackermann kinematic constraints. The proposed approach addresses this limitation by embedding the smoothing process within a virtual non-holonomic robot model.
Based on several simulations using the modified RRT algorithm on partial map and PRM algorithm, as in Figure 8 to Figure 15 for RRT and Figure 17 to Figure 24 for PRM. Based on this comparison, it can be seen that in carrying out the navigation task of some victim’s evacuation in a structured room, the modified RRT algorithm on partial map shows better performance compared to the PRM algorithm. It can be validated in Figure 16 for RRT and Figure 24 for PRM, with the results that the movement in Figure 16 looks smooth and does not experience collisions with static obstacles during victim evacuation in a structured room. On the other hand, in Figure 24 it can be seen that the movement of the mobile robot with the PRM algorithm often touches obstacles, which can affect the performance of the mobile robot. These results show that the modified RRT algorithm provides advantages in the context of casualty evacuation, with more efficient and safe movement in structured spaces. This validation is supported by the visualization of simulation results in Figure 16 and Figure 24. Although the proposed method has been validated through simulations, further validation on real robotic platforms and standardised benchmark environments will be considered for future work to strengthen its applicability in real-world SAR scenarios. Quantitative evaluation confirms that the proposed modified RRT outperforms the PRM approach for evacuation navigation tasks. Compared to PRM, the proposed method reduced path length by 22.1%, decreased curvature variation by 63.1%, shortened computation time by 25.7%, and completely eliminated obstacle collisions.
Future work will include quantitative comparison with other RRT variants and optimization-based smoothing methods to further validate the generality of the proposed approach.
We extend our deepest gratitude to the LPPM UTM for their generous funding provided towards our independent research under Grup Riset scheme, contract number 5836/UN46.4.1/PT.01.03/2023.
[1] Holland, J., Kingston, L., McCarthy, C., Armstrong, E., O’Dwyer, P., Merz, F., McConnell, M. (2021). Service robots in the healthcare sector. Robotics, 10(1): 47. https://doi.org/10.3390/robotics10010047
[2] Piemngam, K., Nilkhamhang, I., Bunnun, P. (2019). Development of autonomous mobile robot platform with mecanum wheels. In 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, pp. 90-93. https://doi.org/10.1109/ICA-SYMP.2019.8646085
[3] Güllü, A., Kuşçu, H. (2021). Evaluation of search strategy for autonomous rescue mobile robot. In 2021 International Conference Automatics and Informatics (ICAI), Varna, Bulgaria, pp. 328-332. https://doi.org/10.1109/ICAI52893.2021.9639868
[4] Murphy, R.R. (2004). Human-robot interaction in rescue robotics. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 34(2): 138-153. https://doi.org/10.1109/TSMCC.2004.826267
[5] Queralta, J.P., Taipalmaa, J., Pullinen, B.C., Sarker, V.K., Gia, T.N., Hannu. (2020). Collaborative multi-robot search and rescue: Planning, coordination, perception, and active vision. IEEE Access, 8: 191617-191643. https://doi.org/10.1109/ACCESS.2020.3030190
[6] Wirth, S., Pellenz, J. (2007). Exploration transform: A stable exploring algorithm for robots in rescue environments. In 2007 IEEE International Workshop on Safety, Security and Rescue Robotics, Rome, Italy, pp. 1-5. https://doi.org/10.1109/SSRR.2007.4381274
[7] Macwan, A., Vilela, J., Nejat, G., Benhabib, B. (2015). A multirobot path-planning strategy for autonomous wilderness search and rescue. IEEE Transactions on Cybernetics, 45(9): 1784-1797. https://doi.org/10.1109/TCYB.2014.2360368
[8] Murphy, R.R., Tadokoro, S., Nardi, D., Jacoff, A., Fiorini, P., Choset, H., Erkmen, A.M. (2008). Search and rescue robotics. In Springer Handbook of Robotics, pp. 1151-1173. https://doi.org/10.1007/978-3-540-30301-5_51
[9] Linder, T., Tretyakov, V., Blumenthal, S., Molitor, P., Holz, D., Murphy, R. (2010). Rescue robots at the Collapse of the municipal archive of Cologne City: A field report. In 2010 IEEE Safety Security and Rescue Robotics, Bremen, Germany, pp. 1-6. https://doi.org/10.1109/SSRR.2010.5981550
[10] Wong, C., Yang, E., Yan, X.T., Gu, D.B. (2018). Autonomous robots for harsh environments: A holistic overview of current solutions and ongoing challenges. Systems Science & Control Engineering, 6(1): 213-219. https://doi.org/10.1080/21642583.2018.1477634
[11] Koledoye, M.A., De Martini, D., Carvani, M., Facchinetti, T. (2017). Design of a mobile robot for air ducts exploration. Robotics, 6(4): 26. https://doi.org/10.3390/robotics6040026
[12] Xu, Z.X., Tian, D.Y., Yan, F. (2023). A quasi-differential type event-triggered MPC for non-holonomic robots with coupled constraints and bounded disturbances. In 2023 IEEE 2nd Industrial Electronics Society Annual On-Line Conference (ONCON), SC, USA, pp. 1-6. https://doi.org/10.1109/ONCON60463.2023.10431318
[13] Chae, H.W., Choi, J.H., Song, J.B. (2020). Robust and autonomous stereo visual-inertial navigation for non-holonomic mobile robots. IEEE Transactions on Vehicular Technology, 69(9): 9613-9623. https://doi.org/10.1109/TVT.2020.3004163
[14] Niroui, F., Zhang, K., Kashino, Z., Nejat, G. (2019). Deep reinforcement learning robot for search and rescue applications: Exploration in unknown cluttered environments. IEEE Robotics and Automation Letters, 4(2): 610-617. https://doi.org/10.1109/LRA.2019.2891991
[15] Deng, W.B., Huang, K.H., Chen, X., Zhou, Z.Q., Shi, C.H., Guo, R.B. (2020). Semantic RGB-D SLAM for rescue robot navigation. IEEE Access, 8: 221320-221329. https://doi.org/10.1109/ACCESS.2020.3031867
[16] He, B., Xu, F.Z., Zhang, P.C. (2022). Kinematics approach to energy efficiency for non-holonomic underactuated robotics in sustainable manufacturing. The International Journal of Advanced Manufacturing Technology, 119: 1123-1138. https://doi.org/10.1007/s00170-021-08305-7
[17] Guan, Z., Sun, Z.C., Wu, J.J., Yang, J.Y. (2023). Resource allocation and optimization of multi-UAV SAR system. In 2023 IEEE Radar Conference (RadarConf23), San Antonio, TX, USA, pp. 1-5. https://doi.org/10.1109/RadarConf2351548.2023.10149786
[18] Veneri, M., Massaro, M. (2021). The effect of Ackermann steering on the performance of race cars. Vehicle System Dynamics, 59(6): 907-927. https://doi.org/10.1080/00423114.2020.1730917
[19] Ackermann, J., Odenthal, D. (1999). Damping of vehicle roll dynamics by gain scheduled active steering. In 1999 European Control Conference (ECC), Karlsruhe, Germany, pp. 4100-4106. https://doi.org/10.23919/ECC.1999.7099975
[20] Yu, X.D., Pei, J.F., Sun, Y.X., Huo, W.B., Huang, Y.L., Zhang, Y. (2022). A multi-view SAR ATR optimal observation path planning method. In IGARSS 2022 - 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, pp. 1536-1539. https://doi.org/10.1109/IGARSS46834.2022.9884308
[21] Zhang, L.J., Liu, J.C., Tan, S.B. (2021). Evacuation navigation strategy in complex building fires. In 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, pp. 7176-7181. https://doi.org/10.1109/CCDC52312.2021.9602789
[22] Fan, J., Mion, L.C., Beuscher, L., Ullal, A., Newhouse, P.A., Sarkar, N. (2022). SAR-connect: A socially assistive robotic system to support activity and social engagement of older adults. IEEE Transactions on Robotics, 38(2): 1250-1269. https://doi.org/10.1109/TRO.2021.3092162
[23] Tang, Y., Zhao, H., Yang, L. (2021). A fast map construction method for indoor mobile robot. In 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, pp. 110-113. https://doi.org/10.1109/DTPI52967.2021.9540121
[24] Keung, K.L., Xia, L., Lee, C.K.M., Leung, C.Y. (2022). A shortest path graph attention network and non-traditional multi-deep layouts in robotic mobile fulfillment system. In 2022 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Kuala Lumpur, Malaysia, pp. 0655-0659. https://doi.org/10.1109/IEEM55944.2022.9989607
[25] Sanchez-Ibanez, J.R., Perez-del-Pulgar, C.J., Garcia-Cerezo, A. (2021). Path planning for autonomous mobile robots: A review. Sensors, 21(23): 7898. https://doi.org/10.3390/s21237898
[26] Gismondi, F., Possieri, C., Tornambe, A. (2022). A solution to the path planning problem via algebraic geometry and reinforcement learning. Journal of the Franklin Institute, 359(2): 1732-1754. https://doi.org/10.1016/j.jfranklin.2021.12.003
[27] Papachristos, C., Kamel, M., Popović, M., Khattak, S., Bircher, A., Oleynikova, H., Dang, T., Mascarich, F., Alexis, K., Siegwart, R. (2019). Autonomous exploration and inspection path planning for aerial robots using the robot operation system. In Robot Operating System (ROS). Studies in Computational Intelligence, pp. 67-111. https://doi.org/10.1007/978-3-319-91590-6_3
[28] Fuad, M., Agustinah, T., Purwanto, D. (2020). Autonomous indoor vehicle navigation using modified steering velocity obstacles. In 2020 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, pp. 83-88. https://doi.org/10.1109/ISITIA49792.2020.9163776
[29] Fuad, M., Agustinah, T., Purwanto, D. (2020). Collision avoidance of multi-modal moving objects for mobile robot using hybrid velocity obstacles. International Journal of Intelligent Engineering and Systems, 13(3): 407-421. https://doi.org/10.22266/ijies2020.0630.37
[30] Fuad, M., Agustinah, T., Purwanto, D. (2021). Modified headed social force model based on hybrid velocity obstacles for mobile robot to avoid disturbed groups of pedestrians. International Journal of Intelligent Engineering and Systems, 14(3): 222-241. https://doi.org/10.22266/ijies2021.0630.20
[31] Wang, P.L., Zhang, T., Xiao, Y.J. (2020). Emergency evacuation path planning of passenger ship based on cellular ant optimization model. Journal of Shanghai Jiaotong University (Science), 25: 721-726. https://doi.org/10.1007/s12204-020-2215-y
[32] Wagner, A.R. (2021). Robot-guided evacuation as a paradigm for human-robot interaction research. Frontiers in Robotics and AI, 8: 701938. https://doi.org/10.3389/frobt.2021.701938
[33] Das, S.K., Dutta, A.K., Debnath, S.K. (2019). Operative critical point bug algorithm - local path planning of mobile robot avoiding obstacles. In 2019 International Conference on Computer, Electrical & Communication Engineering (ICCECE), Kolkata, India, pp. 1-8. https://doi.org/10.1109/ICCECE44727.2019.9001824
[34] Ou, Y.Q., Fan, Y.X., Zhang, X.L., Lin, Y.H., Yang, W.J. (2022). Improved A* path planning method based on the grid map. Sensors, 22(16): 6198. https://doi.org/10.3390/s22166198
[35] Dang, C.V., Ahn, H., Lee, D.S., Lee, S.C. (2022). A path planning method based on theta-star search for non-holonomic robots. In 2022 Joint 12th International Conference on Soft Computing and Intelligent Systems and 23rd International Symposium on Advanced Intelligent Systems (SCIS&ISIS), Ise, Japan, pp. 1-6. https://doi.org/10.1109/SCISISIS55246.2022.10002141
[36] Elkin, M., Neiman, O. (2022). Centralized, parallel, and distributed multi-source shortest paths via hopsets and rectangular matrix multiplication. In 39th International Symposium on Theoretical Aspects of Computer Science (STACS 2022). Leibniz International Proceedings in Informatics (LIPIcs), pp. 27:1-27:22. https://doi.org/10.4230/LIPIcs.STACS.2022.27
[37] Ortner, R., Kurmi, I., Bimber, O. (2021). Acceleration-aware path planning with waypoints. Drones, 5(4): 143. https://doi.org/10.3390/drones5040143
[38] Mondal, S., Nandy, S., Ray, R. (2022). Parametric output function based path following controller for nonholonomic robotic systems. In 2022 IEEE Global Conference on Computing, Power and Communication Technologies (GlobConPT), New Delhi, India, pp. 1-6. https://doi.org/10.1109/GlobConPT57482.2022.9938286
[39] Rasheed, A.A.A., Al-Araji A.S., Abdullah, M.N., (2022). Static and dynamic path planning algoritms design for a wheeled mobile robot based on a hybrid technique. International Journal of Intelligent Engineering & Systems, 15(4): 167-181, https://doi:10.22266/ijies2022.0831.16
[40] Rejith, G., Lakshmi, P., Toby, T., Shibu, N.B.S., Rao, S.N. (2022). Machine learning based criticality estimation algorithm for search & rescue operations in collapsed infrastructures. In 2022 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, pp. 364-369. https://doi.org/10.1109/WiSPNET54241.2022.9767179
[41] Abidin, Z., Muis, M., Djuriatno, W. (2019). Omni-wheeled robot with rapidly-exploring random tree (RRT) algorithm for path planning. In 2019 International Conference on Advanced Mechatronics, Intelligent Manufacture and Industrial Automation (ICAMIMIA), Batu, Indonesia, pp. 288-292. https://doi.org/10.1109/ICAMIMIA47173.2019.9223369
[42] Zhang, L.J., Liu, J.C., Tan, S.B. (2023). Research on knowledge navigation strategy for complex building fire evacuation. In 2023 9th International Conference on Electrical Engineering, Control and Robotics (EECR), Wuhan, China, pp. 229-234. https://doi.org/10.1109/EECR56827.2023.10149988
[43] Maghaydah, S., Maheshwari, P., Alomari, K.M. (2023). Agent-based modelling and simulation of crowd evacuation: Case study for electric train cabin. In 2023 International Conference on Business Analytics for Technology and Security (ICBATS), Dubai, United Arab Emirates, pp. 1-7. https://doi.org/10.1109/ICBATS57792.2023.10111239
[44] Jindal, A., Agarwal, V., Chanak, P. (2022). Emergency evacuation system for clogging-free and shortest-safe path navigation with IoT-enabled WSNs. IEEE Internet of Things Journal, 9(13): 10424-10433. https://doi.org/10.1109/JIOT.2021.3123189
[45] Wang, C.B., Zhang, X.Y., Wang, L.H. (2021). Navigation situation adaptive learning-based path planning of maritime autonomous surface ships. In 2021 6th International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, pp. 342-347. https://doi.org/10.1109/ICTIS54573.2021.9798502
[46] Zhang, Z.A., Wu, R.Z., Pan, Y., Wang, Y., Li, G. (2021). Initial pose estimation and update during robot path planning loop. In 2021 China Automation Congress (CAC), Beijing, China, pp. 5396-5401. https://doi.org/10.1109/CAC53003.2021.9728030
[47] Zhao, B., Wu, C.D., Jiang, Y., Yu, M.H., Sun, R.H. (2022). Research on reflector navigation algorithm and optimization smoothing critical path trajectory. In 2022 China Automation Congress (CAC), Xiamen, China, pp. 4476-4480. https://doi.org/10.1109/CAC57257.2022.10054889
[48] Weng, X., Zhang, J.T., Ma, Y. (2021). Path following control of automated guided vehicle based on model predictive control with state classification model and smooth transition strategy. International Journal of Automotive Technology, 22: 677-686. https://doi.org/10.1007/S12239-021-0063-X
[49] Doroodgar, B., Liu, Y., Nejat, G. (2014). A learning-based semi-autonomous controller for robotic exploration of unknown disaster scenes while searching for victims. IEEE Transactions on Cybernetics, 44(12): 2719-2732. https://doi.org/10.1109/TCYB.2014.2314294
[50] Din, Z.M.U., Razzaq, W., Arif, U., Ahmad, W., Muhammad, W. (2019). Real time ackerman steering angle control for self-driving car autonomous navigation. In 2019 4th International Conference on Emerging Trends in Engineering, Sciences and Technology (ICEEST), Karachi, Pakistan, pp. 1-4. https://doi.org/10.1109/ICEEST48626.2019.8981710
[51] Wang, J., Fader, M.T.H., Marshall, J.A. (2023). Learning-based model predictive control for improved mobile robot path following using Gaussian processes and feedback linearization. Journal of Field Robotics, 40(5): 1014-1033. https://doi.org/10.1002/rob.22165
[52] Xiao, X., Liu, B., Warnell, G., Stone, P. (2022). Motion planning and control for mobile robot navigation using machine learning: A survey. Autonomous Robots, 46(5): 569-597. https://doi.org/10.1007/s10514-022-10039-8
[53] Hernanda, T.Y., Rosa, M.R., Fuadi, A.Z. (2022). Mobile robot-ackerman steering navigation and control using localization based on kalman filter and PID controller. In 2022 5th International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, pp. 154-159. https://doi.org/10.1109/ISRITI56927.2022.10052911
[54] Zhang, J.Q., Zhang, Y., Xu, X.D., Wu, Z., Ye, B. (2022). An autonomous fire-fighting robot with ackermann steering mechanism. In 2022 IEEE International Conference on Real-time Computing and Robotics (RCAR), Guiyang, China, pp. 612-617. https://doi.org/10.1109/RCAR54675.2022.9872258
[55] Skurjat, A. (2019). Steering kinematics and turning resistance experimental investigation of articulated rigid body vehicles. Materials Research Proceedings, 12: 131-138. https://doi.org/10.21741/9781644900215-19
[56] Ren, Z., Chen, J. (2025). Reinforcement-learning-based navigation and path tracking control for orchard unmanned vehicles. In 30th International Conference on Automation and Computing (ICAC), Loughborough, United Kingdom, pp. 1-6, https://doi.org/10.1109/ICAC65379.2025.11196331
[57] Ojha, P. Thakur, A. (2021). Real-time obstacle avoidance algorithm for dynamic environment on probabilistic road map. In 2021 International Symposium of Asian Control Association on Intelligent Robotics and Industrial Automation (IRIA), Goa, India, pp. 57-62. https://doi.org/10.1109/IRIA53009.2021.9588792
[58] Uddin, N., Nugraha, H., Manurung, A., Hermawan, H., Darajat, T.M. (2022). Kinematics modeling and motions analysis of non-holonomic mobile robot. In 2022 5th International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, pp. 220-225. https://doi.org/10.1109/ICOIACT55506.2022.9971911
[59] Mirzae, M.R., Karimi, N., Najafi, E. (2020). ROS-based motion planner for gazebo-simulated rescue robots in RoboCup. In 2020 21st International Conference on Research and Education in Mechatronics (REM), Cracow, Poland, pp. 1-5. https://doi.org/10.1109/REM49740.2020.9313070
[60] Gopika, M.P., Bindu, G.R., Ponmalar, M., Usha, K., Haridas, T.R. (2022). Smooth PRM implementation for autonomous ground vehicle. In 2022 IEEE 1st International Conference on Data, Decision and Systems (ICDDS), Bangalore, India, pp. 1-5. https://doi.org/10.1109/ICDDS56399.2022.10037275