Mahmood H. Enad![]() | Raaed Faleh Hassan
| Raaed Faleh Hassan![]() | Ali A. Khaleel Mahmoud
| Ali A. Khaleel Mahmoud![]() | Amjad Jaleel Humaidi*
| Amjad Jaleel Humaidi*![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This paper explores the advantages of the Two Degree of Freedom Proportional-Integral-Derivative (2DOF_PID) controller in tracking the reference signal and rejecting the disturbance signal at the same time. Three types of metaheuristic optimization algorithms are employed for tuning the controller’s parameters which are Particle Swarm Optimization (PSO), Genetic Algorithm (GA), and Dragonfly Algorithm (DA). These three algorithms have in common that they combine the exploratory concept (global search) and the exploitative concept (local search) in order to reach the optimal global solution. The effectiveness of these algorithms was taken advantage of to improve the performance of the control system that contains the controller. Second and third order plants were adopted for the purpose of testing, evaluating, and comparing the performance of the control system. This aim was accomplished by using each of the optimization algorithms for each plant. The simulation results showed the superiority of the DA in terms of obtaining the lowest value of the Integral Absolute Error (IAE) as the cost function.
2DOF_PID, optimization, metaheuristic, PSO, genetic, dragonfly
Due to its ease of use and resilience, the three-term, or the Proportional-Integral-Derivative (PID) controller is the most often employed in a wide range of industrial systems. The key advantage is the ease with which a PID controller may be tuned without requiring much control knowledge. Many academics have been inspired to offer design ideas for PID controllers. As a result, there is a wide collection of tuning rules in the literatures [1, 2].
Ziegler-Nichols presented the basic idea for adjusting the PID controller in 1942, and it is based on a mathematical formula that represents the PID parameters as functions of specific process parameters [3], Later, many forms of self-tuning PID controllers were proposed [4-9].
PID controller automatic tuning and stabilization have been the subject of extensive research throughout the years [10-20]. While PID controller tuning procedures have shown efficacy in regulating lower-order processes, they frequently produce unsatisfactory results when applied to higher-order and nonlinear systems. Direct optimization, which frequently involves the solving of a nonconvex problem, is a highly effective method for optimizing PID parameters in such complicated systems [21-25].
On the other hand, fuzzy logic control and neural networks, which are the field of computational intelligence, have been used to deal with the problem of PID controller optimization. In the neural networks, the convergence time at the training cycle become inconvenient. The generation of the fuzzy membership function in the fuzzy logic control system build upon data analysis, model of the system and the designer skills [26-28]. Nowadays, metaheuristic algorithms which are evolutionary and nature-inspired optimization algorithms provide an alternative way to tune PID controllers. These algorithms use natural processes such as species evolution or particle swarm behavior to iteratively search for the best combination of parameters. The goal is to mimic nature's natural selection process or collective behavior to achieve optimal or near-optimal solutions [29, 30]. Despite the rapid development in methods for tuning the conventional PID controller, there remains an obstacle that hinders the effectiveness of the controller and is related to its structure [31, 32]. The PID controller represents a system with one degree of freedom. This means that the closed-loop transfer function of this system depends on only one variable, which is the error (the difference between the measured value and the desired value). However, although this system is robust and effective in many applications, it can face challenges in achieving reference input tracking and disturbance rejection simultaneously. Achieving reference input tracking and disturbance rejection simultaneously can be difficult in some cases, especially when the available information is limited or when the system is highly nonlinear. In those cases, the use of advanced control techniques or more complex models may be considered to achieve the desired performance [33, 34]. In order to overcome this limitation of traditional 1DOF_PID, a two-degree-of-freedom (2DOF_PID) controller has emerged where setpoint tracking and disturbance rejection can be achieved separately. This division increases the system's ability to deal with different challenges and provide an effective response to requirements [35-37].
Combining the robustness of metaheuristic optimization approaches with the advantages of a 2DOF-PID controller is the main task of this paper. In conjunction with concepts of exploration and exploitation, three categories of metaheuristic algorithms are employed, which are PSO, GA, and DA. These algorithms are used to fine-tune the controller's parameters to significantly increase the performance of typical second- and third-order linear time invariant (LTI) plants.
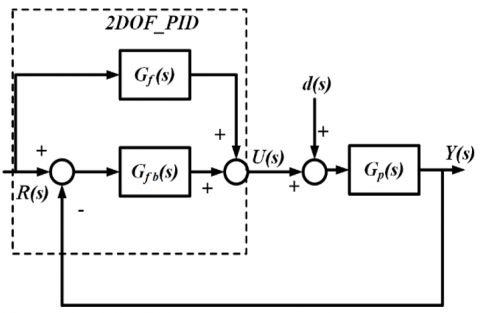
The use of a 2DOF PID controller can result in good performance for both set-point tracking and disturbance rejection. Figure 1 depicts the control system in which the general structure of the proposed 2DOF_PID controller is employed.
Figure 1. General structure of the control system based on 2DOF_PID controller
As its name suggests, 2DOF_PID controller contains an additional degree of freedom compared to the traditional PID controller, as the components of the controller are divided into feedforward Gf(s) compensator and series or feedback Gfb(s) compensator [37]. The series or feedback compensator has the natural form of the conventional PID controller:
${{G}_{fb}}\left( s \right)={{K}_{p}}\left( 1+\frac{1}{{{T}_{I}}s}+{{T}_{D}}s \right)$ (1)
where, ${{K}_{p}}$ is the proportional gain, ${{T}_{I}}$ is the integral time constant, and ${{T}_{D}}$ is the derivative time constant.
The feedforward part has the form of the conventional PD compensator:
${{G}_{f}}\left( s \right)=-{{K}_{p}}\left( \alpha +\beta {{T}_{D}}s \right)$ (2)
where, α and β are the additional two parameters for 2DOF_PID controller. This controller receives two input which are the set point R(s), and $Y_{f}^{'}\left( s \right)$.
$Y_{f}^{'}\left( s \right)=H\left( s \right){Y}'\left( s \right)$, $H\left( s \right)$ is the transfer function of the feedback sensor, and ${Y}'\left( s \right)$ is the system response $Y\left( s \right)$ corrupted with noise signal $N\left( s \right)$. The output of the controller is the control signal $U\left( s \right)$ which drives the controlled process ${{G}_{p}}\left( s \right)$. The system response $Y\left( s \right)$ is governed by the control signal $U\left( s \right)$ and disturbance $d\left( s \right)$. The zero steady state error of the setpoint tracking and disturbance rejection can be achieved if the following assumptions are satisfied:
1) The feedback sensor $H\left( s \right)$ is unity, and the noise $N\left( s \right)$ is zero.
2) The disturbance signal $d\left( s \right)$ is entered directly to the controlled process ${{G}_{p}}\left( s \right)$, i.e., ${{G}_{d}}\left( s \right)$ is unity.
Therefore, the control system will be modified as shown in Figure 2.
Figure 2. Modified structure of the control system based on 2DOF_PID controller
The following relationship will dictate how the system responds: set point tracking and disturbance rejection:
$Y(s)=\left[\begin{array}{c}\frac{G_P(s)\left[G_{f b}(s)+G_f(s)\right]}{1+G_P(s) G_{f b}(s)} \\ \frac{G_P(s)}{1+G_P(s) G_{f b}(s)}\end{array}\right]\left[\begin{array}{l}R(s) \\ d(s)\end{array}\right]$ (3)
where, the ${{G}_{p}}\left( s \right)$ is the controlled plant.
A metaheuristic algorithm is a structure that is generally applied to various optimization problems and needs minor modifications to deal with the specific problem. The need for metaheuristic algorithms has emerged for the following reasons:
1) Metaheuristic algorithms are easy to understand and simple, which increases the ability to make decisions.
2) Metaheuristic algorithms are effective in finding the exact solution [38].
In this paper, three algorithms from the family of metaheuristic algorithms will be adopted for the purpose of studying their effectiveness in tuning the 2DOF_PID controller. These algorithms are:
Genetic Algorithm
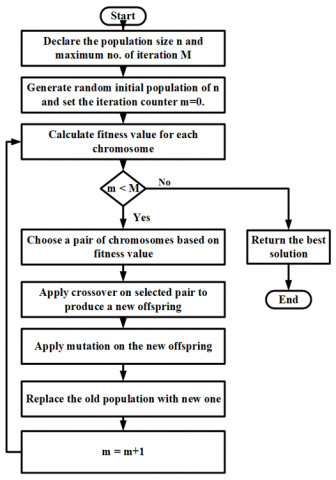
Genetic algorithm is one of the optimization algorithms that relies on a random global search method which simulates the evolution of natural inheritance based on the concept of survival of the fittest. The flowchart of the genetic algorithm behavior is explained as shown in Figure 3 [39].
Figure 3. GA flow chart
Particle Swarm Optimization
This algorithm is originally presented in 1995 by Eberhart and Kennedy, it is a metaheuristic optimization method designed to resemble the social behavior of a swarm of birds or a human group [32, 40]. To employ this algorithm, a collection of particles is used, called a swarm, characterized by their positions and velocities. The swarm is distributed randomly in the solution search area and according to the specified ranges for the elements of the problem targeted in the optimization process. The dimensions of the search space n are determined by the required number of variables in the design, where the speed and position of each particle are represented by the following vectors:
${{V}_{i}}=\left[ {{v}_{i1}},~{{v}_{i2}},\ldots \ldots \ldots \ldots ,{{v}_{in}} \right]$
${{X}_{i}}=\left[ {{x}_{i1}},~{{x}_{i2}},\ldots \ldots \ldots \ldots ,~{{x}_{in}} \right]$
The backbone of the optimization process is to update the position and velocity of each particle in each iteration according to the following relations:
$w={{w}_{up}}-\left( {{w}_{up}}-{{w}_{low}} \right)\left( \frac{t}{{{t}_{max}}} \right)$ (4)
${{v}_{i}}\left( t+1 \right)=C\left( w{{v}_{i}}\left( t \right)+{{c}_{1}}{{r}_{1}}\left( {{P}_{i}}-{{x}_{i}}\left( t \right) \right)+~{{c}_{2}}{{r}_{2}}\left( {{P}_{g}}-{{x}_{i}}\left( t \right) \right) \right)$ (5)
${{x}_{i}}\left( t+1 \right)={{x}_{i}}\left( t \right)+{{v}_{i}}\left( t+1 \right)$ (6)
Table 1 lists the symbols appear in Eqs. (4)-(6).
Table 1. Symbols of Eqs. (4)-(6)
|
Symbol |
Meaning |
|
W |
Balance weight between local and global search |
|
${{w}_{up}}$ |
Upper limit of w |
|
${{w}_{low}}$ |
Lower limit of w |
|
T |
Current iteration |
|
${{t}_{max}}$ |
Maximum no. of iterations |
|
C |
Construction factor |
|
${{c}_{1}}$ |
Cognitive weight |
|
${{c}_{2}}$ |
Social weight |
|
${{r}_{1}},~{{r}_{2}}$ |
Random numbers between 0 and 1 |
|
${{P}_{l}}$ |
Local best position |
|
${{P}_{g}}$ |
Global best position |
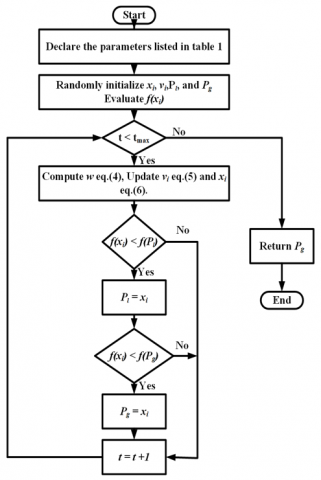
The functional behavior of the PSO algorithm is described by the flowchart depicted in Figure 4.
Figure 4. PSO flow chart
Dragonfly Algorithm
Dragonfly algorithm is an interesting recent optimization algorithm presented in 2016 by Mirjalili [41]. This algorithm is inspired by the dynamic behavior of dragonflies in the migration process, and the static behavior in the feeding process [42, 43]. Migration and feeding processes of a dragonfly swarm create the exploitation and exploration phases, respectively. The behavior of the dragonfly’s swarm consists of the following primitives:
(1) Separation, which is the process of collision avoidance between swarm individuals and can be represented by the following relation:
${{S}_{i}}=-\underset{j-1}{\overset{M}{\mathop \sum }}\,P-{{P}_{j}}$ (7)
where, $P~and~{{P}_{j}}~$are the positions of current and jth neighboring individuals respectively, M is the number of neighboring individuals.
(2) Alignment, which represents the compatibility of the individual’s speed with the speed of individuals in the same group, and it is governed by the following relation:
${{A}_{i}}=\frac{\mathop{\sum }_{j-1}^{M}{{V}_{j}}}{M}$ (8)
where, ${{V}_{j}}$ is the velocity of the jth individual.
(3) Cohesion is the goal of individuals to maintain their position at the center of the group, and its mathematical representation is:
${{C}_{i}}=\frac{\mathop{\sum }_{j-1}^{M}{{P}_{j}}}{M}-P$ (9)
(4) Attraction, which is the movement of individuals towards a food source, and it is mathematically described by:
${{F}_{i}}={{F}_{P}}-P$ (10)
where, ${{F}_{i}}$ is the food source of ith individual, and ${{F}_{P}}$ is the food source position.
(5) Distraction, which is the diversion from the enemies, and its mathematical model is:
${{E}_{i}}={{E}_{P}}+P$ (11)
where, ${{E}_{i}}$ is the position of the ith individual enemy, and ${{E}_{P}}$ is the enemy’s position.
The positions of dragonfly’s individuals are updated inside the search space according to the step vector $P$ which is governed by the following relation:
$\begin{aligned} \Delta P_i(t+1)=s S_i & +a A_i+c C_i+f F_i+e E_i+\omega \Delta P_i(t)\end{aligned}$ (12)
where, s, a, c, f, e are the weights of separation, alignment, cohesion, attraction, and distraction respectively, w is the inertia weight, and t is the iteration number. Therefore, the position of ith individual at the next iteration is described by:
$P_i(t+1)=P_i(t)+\Delta P_i(t+1)$ (13)
Eq. (14) represents the updated dragonfly location, however if there are no adjacent solutions, the following modified equation must be used:
${{P}_{i}}\left( t+1 \right)={{P}_{i}}\left( t \right)+Levy\left( d \right)\times {{P}_{i}}\left( t \right)$ (14)
where, d imply the position vectors' dimension, and the $Levy$ function is determined by:
$Levy\left( d \right)=0.01\times \frac{{{r}_{1}}\times \text{ }\!\!\Gamma\!\!\text{ }\left( \beta \right)}{{{\left| {{r}_{2}} \right|}^{\frac{1}{\beta }}}}$ (15)
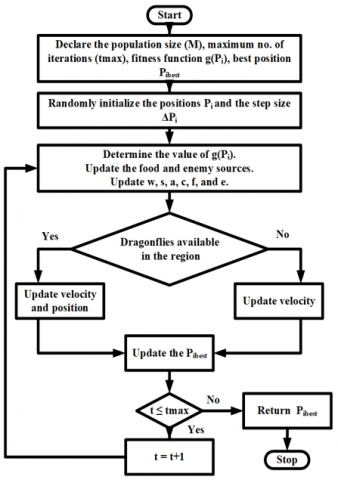
where, ${{r}_{1}}$ and ${{r}_{2}}$ are random numbers between 0 and 1, β is constant. The algorithm of dragonfly is illustrated in flowchart shown in Figure 5.
Figure 5. DA flow chart
The ability of the metaheuristic optimization algorithms to explore complex search spaces, address non-convex objective functions, and continuously adapt to find optimal solutions according to the characteristics of the problem, ensuring a balance between exploration and exploitation. All these characteristics make these algorithms powerful support tools for finding 2DOF-PID controller parameters that contribute to improving the control system in different applications.
The optimization algorithms stated earlier have been adopted individually to tune the 2DOF_PID controller parameters in order to enhance the control system's efficacy and performance, the resulting configured system is illustrated in Figure 6.
The error signal e(t) which is the difference between r(t) and y(t) is delivered to the optimization algorithm block. The optimization algorithm block is adjusting the controller parameter to minimizes the cost function. Two controlled plants ${{G}_{P}}\left( s \right)$ were suggested to validate the performance of the control system. The first plant was a second order plant, while the other was a third order plant. The transfer functions of these plants are described as follows.
${{G}_{P}}\left( s \right)=\frac{0.~438~s+0.03861}{{{s}^{2}}+0.086096~s+0.04215}$ (16)
${{G}_{P}}\left( s \right)=\frac{-0.01261~{{s}^{2}}+335~s+9.967e08}{{{s}^{3}}+6000~{{s}^{2}}+1.1e07~s+6.979e09}$ (17)
Figure 6. Optimization algorithm based control system enhancement
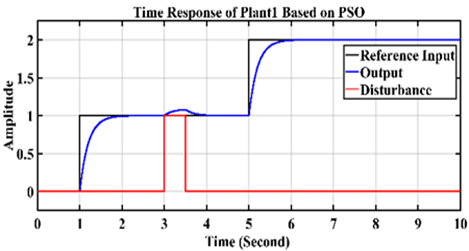
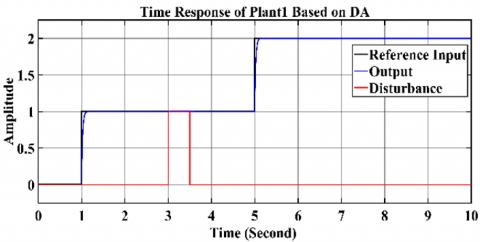
This section presents the results of the simulation conducted on the control system that included the 2DOF_PID controller and the controlled plant. The results showed the performance of the control system when using the two plants described in Eqs. (16) and (17) separately. The three types of optimization algorithms mentioned above were used to adjust the controller elements, which leads to minimizing the Integral Absolute Error (IAE). The behavior of the control system was studied in each case, which is associated with the presence of a stepped reference signal and the appearance of a disturbance signal for a specific period.
The behavior of plant1 with transfer function described in (16) is shown in Figure 7. When the PSO is used, the behavior of the control system based for tracking the reference input and rejecting the disturbance is shown in Figure 7 (a). The effect of using GA on the system’s response is depicted in Figure 7 (b), while Figure 7 (c) shows the effect of using DA on the system’s performance towards the reference input signal and the disturbance signal.
(a)
(b)
(c)
Figure 7. Time Response of Plant1 based on Metaheuristic optimization algorithms
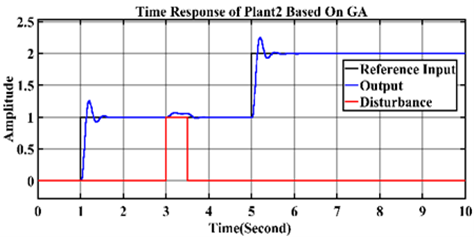
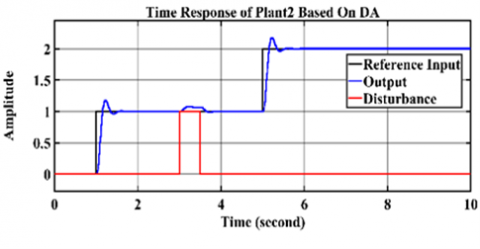
The simulation results of the plant2 which is described in (17) are shown in Figure 8, where the results show the performance of the control system based on the use of optimization algorithms. Figure 8 (a) represent the response of the system for tracking the reference input and rejecting the disturbance when the PSO is employed. The effectiveness of the GA on the system behavior is depicted in Figure 8 (b), and the influence of using DA is shown in Figure 8 (c).
(a)
(b)
(c)
Fgure 8. Time Response of Plant2 based on Metaheuristic optimization algorithms
From observing the simulation results, the response of the system to track the reference signal and reject the disturbancegave acceptable results in terms of low IAE, as shown in Table 2.
Table 2. Comparison of the cost function
|
Cost Function |
Plant1 |
Plant2 |
||||
|
PSO |
GA |
DA |
PSO |
GA |
DA |
|
|
IAE |
0.4456 |
0.148 |
0.0653 |
0.287 |
0.28 |
0.27 |
In this paper, the superiority of the 2DOF_PID controller for tracking the reference input and rejects the disturbance was studied. The influence of employing three types of metaheuristic optimization algorithms in tuning this controller for controlling two types of plants was examined. Simulation results showed the ability of these algorithms to find the controller’s parameters that result in minimizing the cost function IAE (i.e., obtaining the global solution). Although the three optimization algorithms contributed to improving the performance of the control system and produced an acceptable response, the DA algorithm was the best. The advantage of DA resulted from its contribution to finding the lowest value for IAE when using the controller to control both plants. The reason the DA is better is that it focuses on independent moving of the individuals, giving it a greater range of exploration. Also, it is able to promptly adjust to changes in the problem domain, escaping from the local optima and keep looking for the global optimal solution.
The significant outcomes of the simulation procedure indicate that it is imperative to confirm the effectiveness of metaheurestic optimization algorithms in identifying the ideal controller parameters under uncertainty or dynamic system variations. Furthermore, this approach's efficacy needs to be evaluated with Muliple-Input-Multiple-Output (MIMO) systems and/or higher order systems with additional cost functions.
[1] Rodríguez, C., Aranda‐Escolástico, E., Guzmán, J.L., Berenguel, M., Hägglund, T. (2020). Revisiting the simplified IMC tuning rules for low‐order controllers: Novel 2DoF feedback controller. IET Control Theory & Applications, 14(13): 1700-1710. https://doi.org/10.1049/iet-cta.2019.0821
[2] Borase, R.P., Maghade, D.K., Sondkar, S.Y., Pawar, S.N. (2021). A review of PID control, tuning methods and applications. International Journal of Dynamics and Control, 9: 818-827. https://doi.org/10.1007/s40435-020-00665-4
[3] Bennett, S. (1993). Development of the PID controller. IEEE Control Systems Magazine, 13(6): 58-62. https://doi.org/10.1109/37.248006
[4] Fong-Chwee, T., Sirisena, H.R. (1988). Self-tuning PID controllers for dead time processes. IEEE Transactions on Industrial Electronics, 35(1): 119-125. https://doi.org/10.1109/41.3074
[5] Rad, A.B., Lo, W.L., Tsang, K.M. (1997). Self-tuning PID controller using Newton-Raphson search method. IEEE Transactions on Industrial Electronics, 44(5): 717-725. https://doi.org/10.1109/41.633479
[6] Leva, A. (1993). PID autotuning algorithm based on relay feedback. IEE Proceedings. Part D. Control Theory and Applications, 140: 328-338. https://doi.org/10.1049/IP-D.1993.0044
[7] Zhuang, M., Atherton, D.P. (1993). Automatic tuning of optimum PID controllers. In IEE Proceedings D (Control Theory and Applications). IET Digital Library, 140(3): 216-224. https://doi.org/10.1049/ip-d.1993.0030
[8] Åström, K.J., Hägglund, T., Hang, C.C., Ho, W.K. (1992). Automatic tuning and adaptation for PID controllers-A survey. IFAC Proceedings Volumes, 25(14): 371-376. https://doi.org/10.1016/S1474-6670(17)50762-4
[9] Brown, R.E., Maliotis, G.N., Gibby, J.A. (1993). PID self-tuning controller for aluminum rolling mill. IEEE Transactions on Industry Applications, 29(3): 578-583. https://doi.org/10.1109/28.222430
[10] Garcia, R.F., Castelo, F.P. (1996). Fuzzy adaptive PID controller using frequency techniques. In 1996 IEEE International Conference on Systems, Man and Cybernetics. Information Intelligence and Systems (Cat. No. 96CH35929). Beijing, China, 4: 2581-2585. https://doi.org/10.1109/ICSMC.1996.561336
[11] Pirabakaran, K., Becerra, V.M. (2001). Automatic tuning of PID controllers using model reference adaptive control techniques. In IECON'01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 37243), Denver, CO, USA, pp. 736-740. https://doi.org/10.1109/IECON.2001.976706
[12] Chang, M.H., Davison, E.J. (2003). Control of LTI systems subject to unanticipated extreme perturbations using self-tuning 3-term switching controllers. IEEE Transactions on Automatic Control, 48(11): 1975-1985. https://doi.org/10.1109/TAC.2003.819079
[13] Iwai, Z., Mizumoto, I., Liu, L., Shah, S.L., Jiang, H. (2006). Adaptive stable PID controller with parallel feedforward compensator. In 2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, pp. 1-6. https://doi.org/10.1109/ICARCV.2006.345135
[14] Fang, Y., Tan, X., Alici, G. (2008). Robust adaptive control of conjugated polymer actuators. IEEE Transactions on Control Systems Technology, 16(4): 600-612. https://doi.org/10.1109/TCST.2007.912112
[15] Hu, Z., He, Y., Li, W. (2008). Robust PID controller design for multivariable processes. In 2008 Fourth International Conference on Natural Computation. Jinan, China, 4: 427-431. https://doi.org/10.1109/ICNC.2008.390
[16] Yang, F., Yuan, Z., Zhang, W. (2009). Robust adaptive PID control for electromechanical system. In 2009 International Conference on Mechatronics and Automation. Changchun, pp. 391-395. https://doi.org/10.1109/ICMA.2009.5245093
[17] Chang, P.H., Jung, J.H. (2008). A systematic method for gain selection of robust PID control for nonlinear plants of second-order controller canonical form. IEEE Transactions on Control Systems Technology, 17(2): 473-483. https://doi.org/10.1109/TCST.2008.2000989
[18] Xie, X., Liu, J., Zeng, D., Tan, W. (2010). Research of coordinated control system based on robust control. In 2010 the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 4: 47-51. https://doi.org/10.1109/ICCAE.2010.5451791
[19] Zhang, H., Shi, Y., Mehr, A.S. (2011). Robust static output feedback control and remote PID design for networked motor systems. IEEE Transactions on Industrial Electronics, 58(12): 5396-5405. https://doi.org/10.1109/TIE.2011.2107720
[20] Banerjee, S., Halder, K., Dasgupta, S., Mukhopadhyay, S., Ghosh, K., Gupta, A. (2015). An interval approach for robust control of a large PHWR with PID controllers. IEEE Transactions on Nuclear Science, 62(1): 281-292. https://doi.org/10.1109/TNS.2014.2376942
[21] Li, K. (2012). PID tuning for optimal closed-loop performance with specified gain and phase margins. IEEE Transactions on Control Systems Technology, 21(3): 1024-1030. https://doi.org/10.1109/TCST.2012.2198479
[22] Neath, M.J., Swain, A.K., Madawala, U.K., Thrimawithana, D.J. (2013). An optimal PID controller for a bidirectional inductive power transfer system using multiobjective genetic algorithm. IEEE Transactions on Power Electronics, 29(3): 1523-1531. https://doi.org/10.1109/TPEL.2013.2262953
[23] Cruz, N., Moret, J.M., Coda, S., Duval, B.P., Le, H.B., Rodrigues, A.P., Varandas, C.A.F., Correia, C.M.B.A., Gonçalves, B. (2015). An optimal real-time controller for vertical plasma stabilization. IEEE Transactions on Nuclear Science, 62(6): 3126-3133. https://doi.org/10.1109/TNS.2015.2478965
[24] Pradhan, J.K., Ghosh, A. (2015). Multi‐input and multi‐output proportional‐integral‐derivative controller design via linear quadratic regulator‐linear matrix inequality approach. IET Control Theory & Applications, 9(14): 2140-2145. https://doi.org/10.1049/iet-cta.2015.0012
[25] Soltesz, K., Grimholt, C., Skogestad, S. (2017). Simultaneous design of proportional-integral-derivative controller and measurement filter by optimisation. IET Control Theory & Applications, 11(3): 341-348. https://doi.org/10.1049/iet-cta.2016.0297
[26] Tao, Y., Zheng, J., Lin, Y., Wang, T., Xiong, H., He, G., Xu, D. (2015). Fuzzy PID control method of deburring industrial robots. Journal of Intelligent & Fuzzy Systems, 29(6): 2447-2455. https://doi.org/10.3233/IFS-151945
[27] Dettori, S., Iannino, V., Colla, V., Signorini, A. (2018). An adaptive Fuzzy logic-based approach to PID control of steam turbines in solar applications. Applied Energy, 227: 655-664. https://doi.org/10.1016/j.apenergy.2017.08.145
[28] de Moura, J.P., da Fonseca Neto, J.V., Rego, P.H.M. (2019). A neuro-fuzzy model for online optimal tuning of PID controllers in industrial system applications to the mining sector. IEEE Transactions on Fuzzy Systems, 28(8): 1864-1877. https://doi.org/10.1109/TFUZZ.2019.2923963
[29] Bingul, Z., Karahan, O. (2018). A novel performance criterion approach to optimum design of PID controller using cuckoo search algorithm for AVR system. Journal of the Franklin Institute, 355(13): 5534-5559. https://doi.org/10.1016/j.jfranklin.2018.05.056
[30] Joseph, S.B., Dada, E.G., Abidemi, A., Oyewola, D.O., Khammas, B.M. (2022). Metaheuristic algorithms for PID controller parameters tuning: Review, approaches and open problems. Heliyon, 8(5). https://doi.org/10.1016/j.heliyon.2022.e09399
[31] Chen, S.Y., Yang, B.C., Pu, T.A., Chang, C.H., Lin, R.C. (2019). Active current sharing of a parallel DC-DC converters system using bat algorithm optimized two-DOF PID control. IEEE Access, 7: 84757-84769. https://doi.org/10.1109/ACCESS.2019.2925064
[32] Hassan, R.F., Ajel, A.R., Abbas, S.J., Humaidi, A.J. (2022). FPGA based HIL co-simulation of 2DOF-PID controller tuned by PSO optimization algorithm. ICIC Express Letters, 16(12): 1269-1278. https://doi.org/10.24507/icicel.16.12.1269
[33] Leva, A., Seva, S. (2018). Structure-specific analytical PID tuning for load disturbance rejection. IFAC-PapersOnLine, 51(4): 137-142. https://doi.org/10.1016/j.ifacol.2018.06.115
[34] Nie, Z.Y., Zhu, C., Wang, Q.G., Gao, Z., Shao, H., Luo, J.L. (2020). Design, analysis and application of a new disturbance rejection PID for uncertain systems. ISA Transactions, 101: 281-294. https://doi.org/10.1016/j.isatra.2020.01.022
[35] Wang, X., Yan, X., Li, D., Sun, L. (2018). An approach for setting parameters for two-degree-of-freedom PID controllers. Algorithms, 11(4): 48. https://doi.org/10.3390/a11040048
[36] Balaguer, V., González, A., García, P., Blanes, F. (2021). Enhanced 2-DOF PID controller tuning based on an uncertainty and disturbance estimator with experimental validation. IEEE Access, 9: 99092-99102. https://doi.org/10.1109/ACCESS.2021.3095057
[37] Taguchi, H., Araki, M. (2000). Two-degree-of-freedom PID controllers-their functions and optimal tuning. IFAC Proceedings Volumes, 33(4): 91-96. https://doi.org/10.1016/S1474-6670(17)38226-5
[38] Akyol, S., Alatas, B. (2017). Plant intelligence based metaheuristic optimization algorithms. Artificial Intelligence Review, 47: 417-462. https://doi.org/10.1007/s10462-016-9486-6
[39] Katoch, S., Chauhan, S.S., Kumar, V. (2021). A review on genetic algorithm: Past, present, and future. Multimedia Tools and Applications, 80: 8091-8126. https://doi.org/10.1007/s11042-020-10139-6
[40] Arasomwan, M.A., Adewumi, A.O. (2014). Improved particle swarm optimization with a collective local unimodal search for continuous optimization problems. The Scientific World Journal, 2014. https://doi.org/10.1155/2014/798129
[41] Mirjalili, S. (2016). Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Computing and Applications, 27: 1053-1073. https://doi.org/10.1007/s00521-015-1920-1
[42] Meraihi, Y., Ramdane-Cherif, A., Acheli, D., Mahseur, M. (2020). Dragonfly algorithm: A comprehensive review and applications. Neural Computing and Applications, 32(21): 16625-16646. https://doi.org/10.1007/s00521-020-04866-y
[43] Mohammed, A.J., Hassan, R.F. (2022). DTC-SVM control of induction motor based on dragonfly optimization algorithm. In 2022 Second International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, pp. 1-8. https://doi.org/10.1109/ICAECT54875.2022.9807894