Mohamed Jasim Mohamed![]() | Layla H. Abood*
| Layla H. Abood*![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The main issue in electrical system is providing a stable voltage values in order to obtain best devices performance for this reason controlling the automatic voltage regulation (AVR) system becoma more helpful to achieve this requirments, in this paper three controllers are suggested for maintaining the terminal voltage level value of the generator part in AVR system that supplied to custumers, these controllers are (Conventional PID, ArcTan PID and Nonlinear PID), all gains of these controllers is tuned by using an intelligent sun flower optimization (SFO) algorithm. The objective of the design is finding suitable values of these gains that give a stable response based on minimizing error value and testing it using the Integral Time Absolute Error (ITAE) fitness function, the numerical results exhibited that the ArcTan PID controller give the best results values with a lower settling time (0.698) and its faster than conventional PID 5.034 % and faster than nonlinear PID by 5.163% for 5 second simulation time also its reach its peak value in 0.513 sec. and an expectable overshoot value equal to 0.513 with a small error value (0.000645) at its steady state case and then small error value when working at normal state without any disturbance or any uncertainty cases applied but when a disturbances signal is applied with a value equal to ± 0.3 to the system, the NLPID and the conventional PID presents a best response by returning the system to its desired value in just 2 second in the two cases applied and when change the gain values of two parts of AVR system( amplifier & sensor) the NLPID behaves as a the more suitable one and give a superior robust performance in facing this unwanted signals and then a desired response is achieved after small period time with satisfied and acceptable values for woring in this enviroment.
AVR system, terminal voltage, PID, sun flower optimization algorithm
In power system, stability of the supplied voltage value is regarded as a major and very important issue in order to achieve quality of customer requirements and to protect any equipments and devices from any fluctuations may happen which is reflected on their performance an may be could not work again, for this reason using automatic voltage regulator (AVR) will increase the reliability of power system by regulating the boundaries of the terminal voltage in the generator to a suitable level. The major challenge of AVR system will be facing the variations of costumer loads and working with any complex power system. Therefore, various controllers have been suggested to maintain AVR systems to obtain a stable behavior with best evaluations parameters [1].
Different studies have suggested various controllers' types for controlling AVR system and solving the terminal voltage regulation issue like using the PID classical controller due to its simple structure with the benefits of using the new optimization algorithms, in Çelik and Öztürk [2], a combination between simulated annealing algorithm and symbiotic organisms algorithm is suggested for tune the PID controller gains to enhance its performance while in Mosaad et al. [3] two controllers are adopted PID and PID with acceleration PIDA; these two types are tuned using different algorithms like Local Unimodal Sampling (LUS),Teaching Learned Based Optimization (TLBO) and Harmony search Algorithm (HSA) and a robustness test is done to check system performance based on changing its load as happen in any regulator circuits. In the study [4], a Tree-Seed Algorithm (TSA) is used for tuning PID gains and various tests are done to verify system response and enhance system tracking until reach to a stable level while in the study [5], a two optimization method is hybridized together the Simulated Annealing (SA) and Gorilla Troops Optimization (GTO) with a novel cost function is adopted for best optimal values choice. Other studies proposes the generalized form of PID controller which is named the Fractional order PID (FOPID) controller in this type of controller gains will be five parameters, two values are added with a fractional values [6, 7], Ayas and Sahin [8] suggest a novel FOPID controller combined with fractional filter which increase controller gains to seven parameters which are all tuned using Sine Cosine Algorithm(SCA) and its compared with different classical controller then two analysis is done one of them is done by changing AVR system parameter and the other is done by applying external disturbances while in Mok and Ahmad [9] a modified smoothed function algorithm (MSFA) is proposed with the FOPID controller to enhance system regulating facility based on different objective functions.
In this paper a comparison analysis is utilized for three optimal proposed controllers (PID, NLPID, Arc Tan PID) and these three controllers are adopted to reflect the benefits gained when adding a nonlinear function or changing the structure of the conventional controller to modify system performance then a comparison analysis is utilized to show the suitable controller that can be used for maintain AVR system. The smart and unique SFO algorithm is firstly and efficiently used with AVR system which it enhances its performance, then test AVR system robustness by adding external disturbances in two different periods and changing the parameter values for the two parts of AVR system to specify the robust controller based on its response and its transient analysis. The paper is organized as indicated: Section 2 indicates the AVR system model while section 3 describes the suggested controllers. Section 4 explains the SFO method for choosing the optimal controllers gains, section 5 analyzes the simulation results for all controllers then the conclusions are presented in section 6.
The essential idea of an AVR system is to retain the level of terminal voltage in the generator in a stable and constant value. AVR system has four essential parts: an amplifier, an exciter, a generator, and a sensor, it's a closed loop system in which the voltage value of the synchronous generator is checked by sensor. The sensor voltage is the feedback that is modified and smoothed to be tested and then compared with the reference voltage, and then the error is evaluated by taking the difference between the sensor voltage value and input voltage value. This value of error was amplified and sent to the exciter to maintain the current of the excitation in the exciter part. The exciter modifies the current of the rotor field save the terminal voltage value to reach to its accepted value wanted. These parts are represented by equations that represent the transfer function equations which are adopted to simulate the dynamic behavior of an AVR system parts using Matlab/Simulink. Each part has its gain and time constant appeared together in a first-order equation and regarded as the transfer function for each part as indicted below in Table 1 and its block diagram without using any controller is shown in Figure 1 [10, 11].
Table 1. AVR system main parts [10, 11]
|
AVR Part |
Gain Value |
Time Constant |
Transfer Fun. |
|
Amplifier |
Ka=10 |
Ta=1sec. |
Ka/sTa+1 |
|
Exciter |
Ke=1 |
Te=0.4sec. |
Ke/sTe+1 |
|
Generator |
Kg=1 |
Tg=1sec. |
Kg/sTg+1 |
|
Sensor |
Ks=1 |
Ts=0.01sec. |
Ks/sTs+1 |
Figure 1. Block diagram of AVR system
Eq. (1) below represents the AVR system transfer function [11]:
$\frac{\Delta V t(s)}{\Delta V r e f(s)}=\frac{0.1 s+10}{0.0004 s^4+0.0454 s^3+0.555 s^2+1.51 s+11}$ (1)
This section discuss the scheme of three different controllers was adopted for controlling the terminal voltage value and keeping it in a stable level by minimizing error value and achieve a robust response, the controllers suggested are tested in normal enviroment and when there is unwanted signal applied to the system to verify there performance when use another structures like use nonlinear function or ading arc tan function.
3.1 Conventional PID controller with filter
A conventional proportional–integral–derivative (PID) controllers are commonly adopted in different engineering applications due to its simplicity and can give efficient results by reducing the system error and obtain stable response values [12, 13], the first term named proportional will calculate the controller output depending on the proportional error value, with a high coefficient value, in this case the PID controller will behave more fastly and give a faster target value. The integral error will depend on the integral of the error value then calculated for the error found and for its duration value, in this case the integral appraises time, it can find the current error and the past error values in which the proportional part alone cannot find it. Higher integral value can to minimize error levels in the steady state, the last term is the derivative that depends on the slope of detected error as ist variation during working over time, it is adopted for expect system response then modify its performance by regulating the settling time and system stability, the PID transfer function equation is shown in Eq. (2) below and its block diagram in Figure 2.
$u(t)=K_p e(t)+K_i \int e(t) d t+K_d \frac{N}{D+N} \frac{d e(t)}{d t}$ (2)
Figure 2. PID controller block diagram
3.2 ArcTan PID controllers with filter
The use of different mathematic relations like trigonometric, anti trigonometric and hyperbolic functions equations enhance the system behavior and give accurate and stable response [14] due to this many researcher adopts different types of these equations, in this paper the second type was done by utilizing the ARC Tan PID control law which is represented by changing the integral for the error function in the conventional PID control law with an integral for the arc tan relation to the error, as shown in equation. When increasing system complexity the conventional PID controller is not sufficient enough to save system dynamics stable and constant this will make the control signal not able to track the desired value needed efficiently and may attenuate system performance, according to this adopted controller suggests to use the arc tan of error value and the ARC Tan PID controller transfer function is explained in Eq. (3) [15]:
$\begin{gathered}u(t)=K_p e(t)+K_i \int \tan ^{-1}(\gamma e(t)) d t +K_d \frac{N}{D+N} \frac{d e(t)}{d t}\end{gathered}$ (3)
where, γ is design parameter.
3.3 The nonlinear PID controller with filter
The Nonlinear PID controller has been developed to get a best satisfied response [16] for the nonlinear system, where it uses on each term of the linear PID controller a nonlinear function f(.) which is a nonlinear formula of sign function in which it will indicate whether the relation is positive, negative, or zero. For the function f(x) on an period equal to 1 , the sign is positive if f(x)>0 for all x in 1 , the sign is negative if f(x)<0 for all x in 1, while the exponential function is as its name suggests, involves exponents, it has a function with a constant as its base and a variable as its exponent but not the other way round, the exponention function of the error and its derivative and its integral as given below:
$u(t)=f_1(e)+f_2(\dot{e})+f_3\left(\int e\, d t\right)$ (4)
$f_n(\beta)=k_n(\beta)|\beta|^{\alpha_n} \operatorname{sign}(\beta)$ (5)
$k_n(\beta)=k_{n 1}+\frac{k_{n 2}}{1+\exp \left(\mu_n \beta^2\right)}$ (6)
for n=1, 2, 3.
where, $\beta$ could be e, $\dot{e}$, or $\int e\, d t, \alpha_i \in R^{+}$, the function $k_n(\beta)$ is a positive term with variables $k_{n 1}, k_{n 2}, \mu_{n 1} \in R^{+}$. For enhance the nonlinear controller sensitivity for small errors values, the nonlinear variable $k_n(\beta)$ is utilized. For low error values close to zero, the value of the nonlinear term $k_n(\beta)$ approaches the upper bound $k_{n 1}+k_{n 2} / 2$, and for large valuesof error, the nonlinear gain term $k_n(\beta)$ approaches the lower bound $k_{n l}$, this explains the boundaries of nonlinear gain term $k_n(\beta)$, it is laid in the region $\left[k_{n 1}, k_{n 1}+\frac{k_{n 2}}{2}\right]$. The equations of nonlinear PID controller are shown below [17]:
$e(t)=\operatorname{input}(t)-$ output $(t)$ (7)
Derivative term
$\dot{e}(t)=\frac{N p}{D+N_p} \frac{d e(t)}{d t}$ (8)
$k_d(\dot{e})=k_{d 1}+\frac{k_{d 2}}{1+\exp \left(\mu_d \dot{e}^2\right)}$ (9)
Integral term
$k_i\left(\int e\, d t\right)=k_{i 1}+\frac{k_{i 2}}{1+\exp \left(\mu_i\left(\int e \,d t\right)^2\right)}$ (10)
$f_1(e)=k_p(e)|e|^{\alpha_p} {sign}(e)$ (11)
$f_2(\dot{e})=k_d(\dot{e})|\dot{e}|^{\alpha_d} {sign}(\dot{e})$ (12)
$\left.\left.\left.f_3\left(\int e\, d t\right)\right)=k_i\left(\int e\, d t\right) \mid \int e \,d t\right)\left.\right|^{\alpha_i} {sign}\left(\int e\, d t\right)\right)$ (13)
$u(t)=f_1(e)+f_2(\dot{e})+f_3\left(\int e\, d t\right)$ (14)
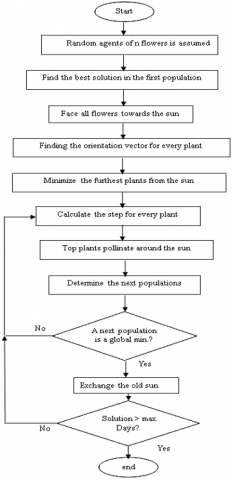
The sunflower optimization method is regarded as a new tuning algorithm, it is a population-based algorithm presented in the study [18], it is used in this study due to its systematic process and smart flow which can guarantee better exploitation and exploration capability and this can be reflected on enhance system efficiency and decreased computational time process. SFO simulate the sunflowers movement to the sunlight direction by using the pollination between near sunflowers, if the space between them and sun increases, the intensity of radiation will minimize and vice versa based to equations below:
$S_{{rad }}=\frac{S_{ {power }}}{4 \pi d^2}$ (15)
where, Spower is the sun power, and Srad depicts the sun radiation intensity that depends on the solar intensity and the square of distance (d) between sun and the palnt. Every sunflower movement direction to the sun is expressed by:
$S_i=\frac{X_*-X_i}{\left|X_*-X_i\right|}$ (16)
i=1, 2, 3, 4, ……. n.
where, Xi and X* are the present and best sunflowers places, n explains the size of population; every one sunflower is moved by (di) distance to the sun path as indicated:
$d_i=\lambda *\left(\left|X_i+X_{i-1}\right|\right) *\left|X_i+X_{i-1}\right|$ (17)
where, λ is the sunflowers' inertial displacement, $P i\left(\left\|X_i+X_{i_{-1}}\right\|\right)$ represents the probability of pollination of two near flowers. Each sunflower’s step is specific and it is as shown:
$d_{\text {max }}=\left\|X_{\text {max }}-X_{\text {min }}\right\|^2 * N_{\text {pop }}$ (18)
The places of the sunflower are being within the boundaries' Xmin and Xmax, where Xmin and Xmax explain the lowest and highest levels respectively. Npop represents the size of population and the equation below indicates the next population towards the sun:
$X_i+\overline{1}=X^{\rightarrow \rightarrow \rightarrow}+d_i * s_i$
The SFO algorithm like the other swarm intellegent algorithms suffers from slow convergence and it can be trapped easily in local minima. The SFO flow chart is shown in Figure 3 below.
Figure 3. The SFO algorithm flowchart
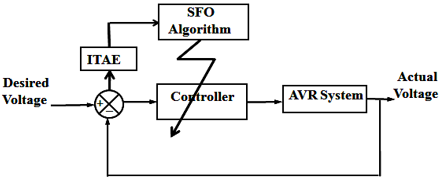
The simulation analysis of the AVR system based on various optimal controllers is discussed in this section; the three controllers are studied and investigated to obtain a stable and robust system response based on SFO algorithm, Table 2 below lists the SFO algorithm parameter and the AVR system block diagram is indicated in Figure 4.
Table 2. SFO algorithm parameter
|
Description |
Value |
|
Sunflower numbers |
20 |
|
pollination rate |
0.05 |
|
mortality rate |
0.1 |
|
Maximum number of iteration |
100 |
Figure 4. Block diagram of AVR based on SFO algorithm
For efficient monitoring and tracking to the desired response and to achieve best controlling to the terminal voltage value, an Integral Time Absolute Error (ITAE) function [19] is adopted as a fitness function, it is represented by a mathematical formula that depends on error value calculated between desired and actual values wanted and the instanteous time when running the algorithm to find the optimal prameters, its variables are the error and the time as indicated in Eq. (19), it is adopted as a cost function [20, 21] to test the error when the SFO is run until reach to the most suitable gains values and that make the sysetm give a stable wanted behavior, as indicated in Figure 5 below.
$I T A E=\int_0^{\infty} t|\mathrm{e}| d t$ (20)
Figure 5. AVR system response for the three different controllers
The optimal gains of all controllers are listed in Table 3, its arranged for each controller based on its structure indicated in section 3 and all these gains are calcualted using the SFO algorithm.
Table 3. Optimal gains of suggested controllers
|
Controller Type |
Kp |
Ki |
Kd |
N |
γ |
|
Con_PID |
0.20868 |
5.65316 |
0.25490 |
100.0 |
- |
|
ArcTan_PID |
0.26574 |
7.53114 |
0.29308 |
100.0 |
1 |
|
NL_PID |
Kp1 0.106797 Kp2 3.31709 μp 0.5367 αp 0.77941 |
Ki1 0.00805 Ki2 9.0 μi 1.76899 αi 0.86079 |
Kd1 0.76485 Kd2 0.02617 μd 0.00284 αp 0.64616 |
100.0 |
- |
The step response analysis in Table 4 is used to demonstrate the evaluation parameters for the controllers used with AVR system.
Table 4. Evaluation parameters for all controllers
|
Evaluation Parameter |
Con_PID |
ArcTan_PID |
NL_PID |
|
Rise time |
0.425 |
0.366 |
0.332 |
|
Over shoot / Under shoot % |
3.25 |
4.808 |
3.16/8.24 |
|
Peak Time |
0.589 |
0.513 |
0.4/0.598 |
|
Settling time |
0.735 |
0.698 |
0.736 |
|
Steady state Error |
0.000727 |
0.000645 |
0.00130 |
|
ITAE |
0.034456954 |
0.030291026 |
0.037403491 |
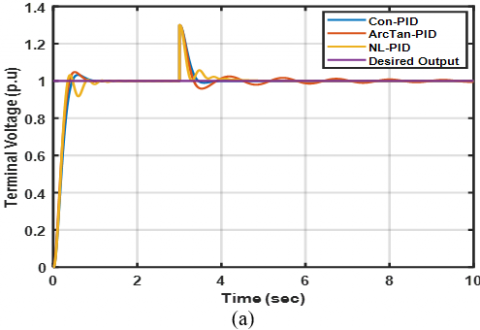
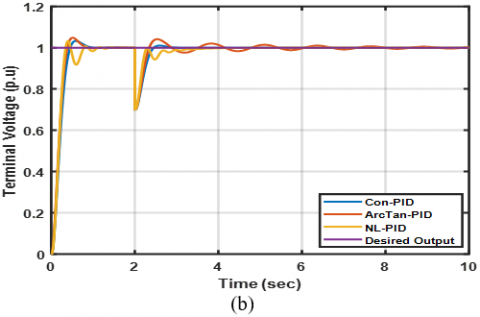
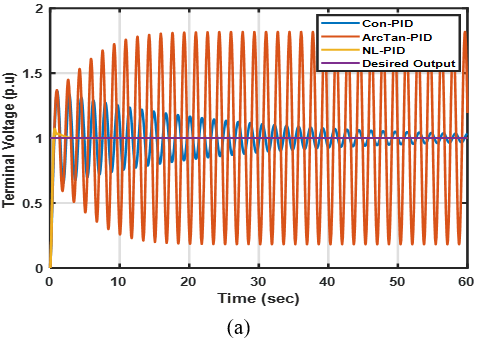
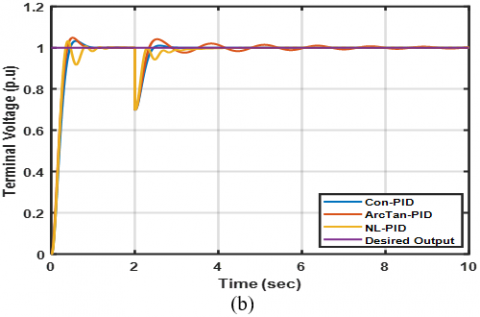
As indicated in Table 4 the ArcTan PID controller have the best performance when it is compared to the two other controllers used, it is superior in its rise time but it has an overshoot higher than others but it is faster in reaching to the desired value with a lower settling time (0.698 sec.) even there is an over shoot value with (4.808), with a smaller error value and a low ITAE (0.030291026) while the NLPID controller have a higher error value (0.00130) also a higher ITAE (0.037403491) also its suffer from overshoot and undershot value at its start working then reach to settling time at (0.736 sec.), finally the conventional PID will have a higher rise and settling time with acceptable overshoot value (3.25), due to this the ArcTan is considered as the best controller when the simulation is done with normal environment without any disturbances or any change in its parameters this in fact return to the use of the mathematic anti trigonometric relation (ArcTan) also to the best values tuned using the intelligent SFO algorithm. Then to test the controllers robust response two steps will done the first one is when the AVR system terminal voltage generated from generator part is increased or decreased during real working and this issue will translated by applying an unexpected increase or decrease in its desired value due to any reason may happen during real working of the AVR system, two types of signals is applied as an external disturbance in positive and negative values (± 0.3 volt) in two different time periods as shown in Figure 6.
Figure 6. a) Add +0.3 volt at t=3 sec; b) Add -0.3 volt at t=2 sec
The second step is done by changing the gain value of the sensor and the amplifier parts from the AVR system by a value equal to ± 25% from its original values to see the behavior of the controllers at this condition, the response of the controllers is indicated in Figure 7.
Figure 7. a) - 25% in amplifier gain; b)+25% in amplifier gain; c) - 25% in sensor gain; b) +25% in sensor gain amplifier
It is obvious from Figure 6 the PID and nonlinear PID give a robust response as shown, they are need 2 second to return to their responses in the two cases of adding disturbances signal(Positive ,Negative), this small value in not sensed when the system is in continues supply for the terminal voltage in long time periods while in Figure 7 when changing the amplitude of the gain of two parts of AVR system(amplifier and sensor) the NLPID controller show the best robust response when compared with Conventional PID and the ArcTan PID controllers, it suffer from little fluctuation in its value but it face this change and give a best response after acceptable time period.
In this study, three types of controller's schemes are presented for controlling AVR system with the benefits use of a smart SFO algorithm to regulate the supplied voltage from AVR system by adopting ITAE function for minimizing error value during the whole simulation process. The comparison between these controllers is utilized; ArcTan controller is superior in different evaluation parameters with a small settling time equal to 0. 698 as compared with other controllers and an acceptable overshoot value equal to 0.408 also a small eeror valu noticed at its steady state with a value equal to 0.000645, all these evaluation parameter is appeared on its efficient system response. Then for check their performance in facing different signal regarded as a disturbances signal and the changing of its parameter value during supply voltage for system distribution, a positive and negative disturbances signals is given to the AVR system and their values are ± 0.3 v in two period (t=2 sec., t=3 sec.); the nonlinear PID controller and the conventional PID give a best behavior in solving these matter in 2 sec. and returning the system to its wanted voltage level value and reflecting a stable desired response, and when changing the gain of two of AVR system parts (amplifier and sensor) with a value equal to ± 25% from its original values, the NLPID controller fix this issue after a small time duration. Finallly for future work different ideas can be utilized to enhance system effeciency like using a cascade controller structure or use an intelligent method combined with convention controller or use another more recent optimization algorithm which can give best tunable gains values in which it can be reflected on system performance.
[1] Abood, L.H., Oleiwi, B.K. (2021). Design of fractional order PID controller for AVR system using whale optimization algorithm. Indonesian Journal of Electrical Engineering and Computer Science, 23(3): 1410-1418.
[2] Çelik, E., Öztürk, N. (2018). A hybrid symbiotic organisms search and simulated annealing technique applied to efficient design of PID controller for automatic voltage regulator. Soft Computing, 22: 8011-8024. https://doi.org/10.1007/s00500-018-3432-2
[3] Mosaad, A.M., Attia, M.A., Abdelaziz, A.Y. (2018). Comparative performance analysis of AVR controllers using modern optimization techniques. Electric Power Components and Systems, 46(19-20): 2117-2130. https://doi.org/10.1080/15325008.2018.1532471
[4] Köse, E. (2020). Optimal control of AVR system with tree seed algorithm-based PID controller. IEEE Access, 8: 89457-89467. https://doi.org/10.1109/ACCESS.2020.2993628
[5] Alghamdi, S.; Sindi, H.F.; Rawa, M.; Alhussainy, A.A.; Calasan, M.; Micev, M.; Ali, Z.M.; Abdel Aleem, S.H.E. (2022). Optimal PID controllers for AVR systems using hybrid simulated annealing and gorilla troops optimization. Fractal and Fractional, 6(11): 682. https://doi.org/10.3390/fractalfract6110682
[6] Abood, L.H., Haitham, R. (2022). Design an optimal fractional order PI controller for congestion avoidance in internet routers. Mathematical Modelling of Engineering Problems, 9(5): 1321-1326.
[7] Abood, L.H., Ali, I.I., Oleiwi, B.K. (2022). Design a robust fractional order TID controller for congestion avoidance in TCP/AQM system. In 2022 26th International Computer Science and Engineering Conference (ICSEC), pp. 366-370. https://doi.org/10.1109/ICSEC56337.2022.10049311
[8] Ayas, M.S., Sahin, E. (2021). FOPID controller with fractional filter for an automatic voltage regulator. Computers & Electrical Engineering, 90: 106895. https://doi.org/10.1016/j.compeleceng.2020.106895
[9] Mok, R., Ahmad, M.A. (2022). Fast and optimal tuning of fractional order PID controller for AVR system based on memorizable-smoothed functional algorithm. Engineering Science and Technology, an International Journal, 35: 101264. https://doi.org/10.1016/j.jestch.2022.101264
[10] Padiachy, V., Mehta, U., Azid, S., Prasad, S., Kumar, R. (2022). Two degree of freedom fractional PI scheme for automatic voltage regulation. Engineering Science and Technology, an International Journal, 30: 101046. https://doi.org/10.1016/j.jestch.2021.08.003
[11] Abood, L.H. (2022). Optimal modified PID controller for automatic voltage regulation system. In AIP Conference Proceedings, 2415(1): 030007. https://doi.org/10.1063/5.0092583
[12] Hattim, L., Karam, E.H., Issa, A.H. (2018). Implementation of self tune single neuron PID controller for depth of anesthesia by FPGA. In New Trends in Information and Communications Technology Applications: Third International Conference, NTICT 2018, Baghdad, Iraq, Proceedings 3, pp. 159-170. http://doi.org//10.1007/978-3-030-01653-1_10
[13] Shneen, S.W., Sulttan, M.Q., Jaber, M.H. (2020). Variable speed control for 2Ph-HSM in RGS: A comparative simulation study. International Journal of Electrical and Computer Engineering, 10(3): 2285.
[14] Ali, E.H., Reja, A.H., Abood, L.H. (2022). Design hybrid filter technique for mixed noise reduction from synthetic aperture radar imagery. Bulletin of Electrical Engineering and Informatics, 11(3): 1325-1331. https://doi.org/10.11591/eei.v11i3.3708
[15] Al-shamarraie, S.A., Abbas, Y.K. (2012). Design of electronic throttle valve position control system using nonlinear PID controller. International Journal of Computer Applications, 59(15): 27-34.
[16] Abood, L.H., Oleiwi, B.K., Humaidi, A.J., Al-Qassar, A.A., Al-Obaidi, A.S.M. (2023). Design a robust controller for congestion avoidance in TCP/AQM system. Advances in Engineering Software, 176: 103395. https://doi.org/10.1016/j.advengsoft.2022.103395
[17] Najm, A.A., Ibraheem, I.K. (2019). Nonlinear PID controller design for a 6-DOF UAV quadrotor system. Engineering Science and Technology, an International Journal, 22(4): 1087-1097. https://doi.org/10.1016/j.jestch.2019.02.005
[18] Gomes, G.F., da Cunha, S.S., Ancelotti, A.C. (2019). A sunflower optimization (SFO) algorithm applied to damage identification on laminated composite plates. Engineering with Computers, 35: 619-626. https://doi.org/10.1007/s00366-018-0620-8
[19] Abood, L.H., Kadhim, N.N., Abd Mohammed, Y. (2023). Dual stage cascade controller for temperature control in greenhouse. Bulletin of Electrical Engineering and Informatics, 12(1): 51-58. https://doi.org/10.11591/eei.v12i1.4328
[20] Abd Mohammed, Y., Abood, L.H., Kadhim, N.N. (2023). Design and simulation an optimal enhanced PI controller for congestion avoidance in TCP/AQM system. TELKOMNIKA (Telecommunication Computing Electronics and Control), 21(5): 997-1004. https://doi.org/10.12928/TELKOMNIKA.v21i5.24872
[21] Abood, L.H., Oleiwi, B.K., Ali, E.H. (2022). Optimal backstepping controller for controlling DC motor speed. Bulletin of Electrical Engineering and Informatics, 11(5): 2564-2572. https://doi.org/10.11591/eei.v11i5.3940