Asma'a S. Hatmi*![]() | Tasneem Dawahdeh
| Tasneem Dawahdeh![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The study explores a Load Frequency Control (LFC) system using a Fractional Order Proportional-Integral-Derivative (FOPID) controller. The study focuses on a three-area system with LFC, and the parameters of the proposed FOPID controller (kp, ki, kd) are improved using the transit search method. Through comprehensive MATLAB simulations, the response of the LFC system is rigorously investigated, with a particular focus on frequency stability and tie-line power variations. A comparison study is performed, and the results obtained with the FOPID controller are compared to those of standard control approaches. Highlighting the efficacy of the FOPID controller tuned via Transit Search Optimization. Results of the two controllers show the optimized FOPID controller can improve the dynamic response of the system frequency and the tie-line power. The study offers knowledge of power system stability and control, demonstrating the efficacy of sophisticated control in boosting the operational dependability of complex multi-area power systems.
Load Frequency Control, Fractional Order Proportional-Integral-Derivative controller, transit search optimization algorithm, tie-line power
The quality of the electrical power system is one of the main concerns for electrical engineers. Over the years, the power system has become more complicated and nonlinear because of the high power demand and increased use of nonlinear devices. The voltage and frequency are the two main variables that should remain at their prescribed values. Any deviations in these two variables reflected negatively on the operation of the network and customer devices, especially the power electronic devices that are very sensitive to voltage and frequency variations. The losses in the power system can also be considered as one of the problems resulting from the poor quality of the energy.
In addition, the significant deviation in voltage and frequency becomes a stability problem that threatens the power system and may lead to blackouts. Thus, power system engineers nowadays witness real issues related to the quality and stability of the network, which enhances them to introduce new techniques to sustain the system frequency and voltages at their allowable limits.
The present paper is interested in the control of the frequency of the power system, or what is called Load Frequency Control. The active power in the network has a direct effect on the frequency. The new intelligent control methods aim to deal with active power in the lines and power generated from the generator with the mechanical power input of the synchronous generator.
The function of Load Frequency Control is maintaining the frequency and absolute power of the single-area or multi-area system within its prescribed values. In addition, LFC also distributes the load demand between generators in one region or multiple regions and controls the scheduled tie-line power between areas [1]. The control scheme used should be able to maintain the frequency and tie-line power within its limits and return zero steady-state error. The joint controllers used for this purpose are the conventional PI or PID controllers [2-4]. The conventional PID control can’t perform efficiently with the system's nonlinearity. FOPID controller is an updated version of the PID control but with different tuning parameters that give better dynamic performance of the LFC system. However, FOPID has five parameters to be designed. Innovative optimization techniques are used to design the optimum parameters of the controller. Different mathematical algorithms are adopted to better deal with the power system nonlinearity and give fast and more accurate results for system response. Particle Swarm Optimization, Artificial Neural Networks, and Genetic Algorithms are well-known smart methods for dealing with power system nonlinearity problems [5-10].
Pandit et al. [11], describe other intelligent algorithms applied to power system problems. The proposed controller in the paper is an FOPID controller with the optimal tuning of the controller parameters using the transit search optimization algorithm. The function of the controller is to give better system performance. The results come with the use of the proposed control with optimized parameters to emphasize the robustness and high-quality features of the control [12-15].
The proposed control scheme in the work employs the transit search algorithm to optimize the FOPID parameters to improve its performance. The FOPID controller improves the system's performance by reducing the overshoot in the speed response and reducing the time taken to reach the steady state value of the speed. Leads to a more stable and robust system.
The primary purpose is to harness the advantages of FOPID controllers, as revealed in the study conducted by Prakash et al. [16]. FOPID controllers, by adding fractional-order calculus into the control loop, offer higher resilience and increased transient response, making them well-suited for the complexity of modern power systems. By adopting and extending the FOPID framework, the study intends to achieve precise and adaptive load frequency control. The second objective is to optimize the FOPID controller parameters using the Transit Search Optimization technique. Transit Search Optimization is a recently developed metaheuristic algorithm inspired by the movement patterns of public transit vehicles [13, 16]. The algorithm exhibits excellent efficiency in addressing complicated optimization issues. By using Transit Search Optimization in the FOPID controller, the study intends to fine-tune the controller parameters, ensuring optimal performance under different operating situations.
Load Frequency Control (LFC) is a crucial part of power system operation, ensuring real-time balance between generation and consumption. Historically, it used Proportional-Integral-Derivative (PID) controllers to respond to frequency changes. Modern systems, like renewable energy integration and smart grids, present new challenges and opportunities for LFC. Tuning these components is essential for optimal functioning.
Load Frequency Control (LFC) is a critical aspect of power system operation, preserving the real-time balance between generation and consumption. It serves a key function in maintaining system frequency and tie-line power flows within acceptable limits following unexpected load changes or outages [17, 18]. LFC prevents frequency variations, which, if not managed, can cause grid instability and blackouts. Historically, LFC was mainly achieved through Proportional-Integral-Derivative (PID) controllers, which give a simple and effective technique of controlling the power output of generators to match the demand.
PID controllers are widely used in industrial applications due to their simplicity and effectiveness. They consist of three components: Proportional (P), Integral (I), and Derivative (D) terms. Proper tuning is crucial for optimal control performance. Voltage and frequency variations pose significant challenges in power systems, potentially leading to instability and equipment damage. These variations can disrupt synchronization and cause cascading failures and blackouts. Load Frequency Control (LFC) and PID controllers help minimize these variations by balancing power generation and load demand. PID controllers, with their proportional, integral, and derivative components, stabilize the system by altering generator outputs in response to frequency fluctuations [18]. In the ever-changing landscape of power systems, guaranteeing steady functioning, particularly in multi-area systems, is paramount. Load Frequency Control (LFC) is crucial for maintaining frequency stability, which is vital for the reliable operation of linked electricity grids [19]. Advanced control techniques, such as Fractional Order Proportional-Integral-Derivative (FOPID) controllers, are becoming increasingly popular due to their capacity to manage complicated and nonlinear systems. Additionally, including optimization methods, like Transit Search Optimization, boosts the adaptability and efficiency of these controllers.
The work conducted by Hossam-Eldin et al. [20] focuses on the dynamic performance of Load Frequency Control in a three-area system utilizing a novel FOPID controller optimized by Transit Search Optimization. The research addresses a crucial gap in the field by evaluating the effectiveness of sophisticated control techniques in multi-area power systems. The study intends to analyze how the FOPID controller, coupled with sophisticated optimization approaches, may improve the dynamic response and stability of the system under diverse operating settings and disturbances.
The introduction discusses the importance of Load Frequency Control (LFC) in power system stability, particularly in multi-area systems. Traditional methods face challenges in handling complex and nonlinear systems. The study introduces Fractional Order Proportional-Integral-Derivative (FOPID) controllers and Transit Search Optimization to enhance dynamic performance. The study uses mathematical models and simulations to evaluate the dynamic performance of a three-area system, showing the effectiveness of the FOPID controller.
The study Prakash et al. [16] proposed an advanced LFC model that uses Fractional Order Proportional-Integral-Derivative (FOPID) controllers and Transit Search Optimization to enhance system dynamic performance. Understanding the model's significance requires a deeper understanding of LFC and the need for more sophisticated control strategies.
Regulating System Frequency: The fundamental purpose of an LFC model is to maintain system frequency within a specified range. Frequency variances can come from changes in load demand, fluctuations in renewable energy output, or disturbances in the power system. These deviations need to be corrected promptly to prevent grid instability.
Multi-Area System Considerations: The LFC model is created for a three-area system in the study framework. In multi-area systems, the coordination of LFC becomes more difficult due to the interconnections between multiple regions. Effective control mechanisms are essential to ensure minimal frequency variations and the power flow between zones is well-balanced.
FOPID Controller: The paper introduces the usage of Fractional Order Proportional-Integral-Derivative (FOPID) controllers. Unlike traditional PID controllers, FOPID controllers can capture and respond to complex, fractional-order dynamics. Provides for a more precise and adaptive control response, particularly in systems with nonlinearities and uncertainties.
Transit Search Optimization: Transit Search Optimization is employed to further increase the LFC model's performance. Optimization approaches, including Transit Search Optimization, assist in fine-tuning controller parameters to produce the desired system response. Optimization ensures that the control strategy reacts efficiently to different operating scenarios.
Dynamic Performance Assessment: The LFC model's success is evaluated based on dynamic performance parameters, including settling time, overshoot, and steady-state inaccuracy. The study examines how effectively the model can maintain system stability and adapt to disruptions by assessing these characteristics.
Load Frequency Control in a single area is one of the two essential schemes on the generator unit, which includes the LFC and the Automatic Voltage Regulator AVR. Whereas the LFC is responsible for the frequency and absolute power, the AVR function maintains the generator's terminal voltage on its allowable limits by controlling the injected flux from the excitation system [1]. As the actual power output from the generator is changed by increasing or decreasing the load demand, the frequency according to the swing equation is changed, mismatch is sensed, and the speed governor in the LFC system adjusts the valve position, which allows for a less or more amount of input energy to flow to the turbine to balance the change occurs in the output [21].
The Swing Equation: Commonly known as the synchronous machine transient stability equation, is a crucial equation used in power system analysis. It describes the dynamic behavior of synchronous generators in power systems during transient stability investigations. Transient stability refers to the ability of a power system to retain synchronism following a disruption, such as a malfunction or a quick shift in demand.
Delta (Δ) in Power Systems: In power systems, "delta" (Δ) often refers to the change or difference in a parameter, such as frequency, voltage, or power, from its nominal or beginning value. For example, Δf denotes the change in frequency from the nominal frequency. Delta values are critical indicators of system departures from the planned state. Monitoring and regulating these delta values within certain limits are essential in LFC to maintain stable frequency and voltage levels.
The model of the generator is derived from the swing equation. Applying the equation of synchronous machine to small perturbation:
$\frac{2 H}{\omega_s} \frac{d^2 \Delta \delta}{d t^2}=\Delta P_m-\Delta P_e$ (1)
Or in terms of small deviations in speed:
$\frac{d \Delta \omega}{d t}=\frac{1}{2 H}\left(\Delta P_m-\Delta P_e\right)$ (2)
Taking the Laplace transform of the previous equation,
$\Delta \omega(s)=\frac{1}{2 H s}\left[\Delta P_m(s)-\Delta P_e(s)\right]$ (3)
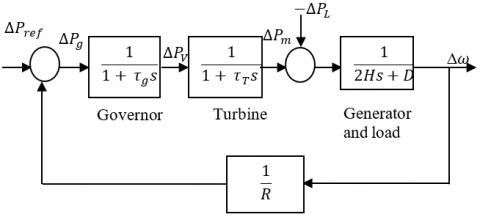
The block diagrams for the Load Frequency Control (LFC) of an isolated power station are shown in Figure 1. The block diagrams of the governor and turbine in the scheme use the linear transfer function of the two devices in the simplest form, as seen in the figure.
Figure 1. The LFC model for single area system
The expression 1:
$\frac{1}{2 H s+D}$
Represents a transfer function in the Laplace domain, where s is the complex frequency variable, H represents the inertia constant, and D represents the damping factor. The transfer function is often used in control systems and power system stability studies to represent the dynamics of a synchronous generator connected to an electrical grid.
The transfer function describes the relationship between an input signal (for example, a disturbance in the electrical grid) and the generator's response regarding angular velocity (or frequency) variations.
The expression 2:
$\frac{1}{1+\tau_g S}$
Represents a transfer function in the Laplace domain, where S is the complex frequency variable, and τg is a time constant. The transfer function is a first-order system commonly used in control systems and dynamics analysis.
The expression 3:
$\frac{1}{1+\tau_T \boldsymbol{S}}$
Represents a transfer function in the Laplace domain, where S is the complex frequency variable, and τT is a time constant. The transfer function is a first-order system often used in control systems, signal processing, and other areas of engineering.
The expression 4:
$K_p+K_d+\frac{K_i}{s}$
Represents a transfer function in the Laplace domain for a control system. In the expression:
Represents a transfer function in the Laplace domain, where s is the complex frequency variable, H represents the inertia constant, and D represents the damping factor. The transfer function is often used in control systems and power system stability studies to depict the dynamics of a synchronous generator connected to an electrical grid.
LFC maintains the system frequency within an acceptable range (typically 50 Hz or 60 Hz) by adjusting generation in response to load variations. Deviations in frequency can harm equipment and disrupt operations. LFC ensures that the total generation matches the total load demand in real-time. Sudden imbalances can lead to blackouts or equipment breakdowns. LFC supports the integration of demand response algorithms, allowing the grid to respond to changes in demand patterns [20].
LFC optimizes the generation mix to minimize costs while fulfilling demand. It assists in economic dispatch when generators with lower running costs are employed more, conserving fuel and reducing operational expenses. With the advent of renewable energy sources like wind and solar, LFC become crucial in managing changes in their output, providing grid stability despite variability. LFC can coordinate energy storage systems' charging and discharging cycles, boosting grid reliability. LFC can execute load shedding in a regulated manner, preventing widespread blackouts during severe disturbances. It helps sustain crucial services even in crisis conditions. LFC enables a rapid response to disturbances such as unexpected demand shifts or generator outages, preventing cascading failures and maintaining grid resilience [22]. By maximizing generating and avoiding inefficient operation, LFC indirectly assists in reducing greenhouse gas emissions. It aids in accomplishing environmental goals and supporting sustainable behaviors. Studying LFC models helps specialists replicate numerous scenarios and understand how the system responds to disturbances and control tactics. Researchers may build, test, and tune LFC controllers for real-world deployment, assuring the stability and reliability of power grids under varied scenarios. With the integration of smart grid technologies, micro grids, and renewable energy sources, analyzing and developing LFC models are vital for planning future grids that are dependable, robust, and environmentally benign.
The Proportional Integral Derivative (PID) controller is a commonly utilized feedback control mechanism in different engineering applications, including temperature control systems. It is designed to autonomously control a process or system to attain a desired state or set point by continuously calculating and modifying the control input. In the PID controller, the control output is the sum of three terms: the proportional term (Kp), the integral term (Ki), and the derivative term (Kd). Each phrase is distinct in determining the controller's response [23]—proportional Term (Kp).
The term is proportional to the present error, which is the difference between the desired set point and the current system state. A higher KP value results in a stronger response to the current error. It gets the system closer to the specified point but might lead to overshooting if set too high. The proportional term immediately reacts to the error, exerting more control effort when the error is significant.
In the study, Tong [23] likely analyses the PID controller's parameters (Kp, Ki, and Kd) to optimize the furnace's temperature control. The PID controller effectively manages temperature variations and ensures heating stability by adjusting settings based on the furnace's response to varied conditions. A logic adaptive optimization model allows dynamic parameter modification based on real-time feedback.
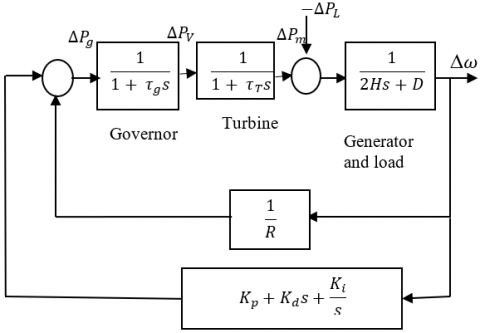
With the above LFC model in Figure 1, there is a steady state deviation in the speed (frequency) due to a change in the load power. To improve the system behaviour, an additional proportional, integral, and derivative control action (PID controller) should be installed in the feedback of the LFC scheme. The effect of critical control is to eliminate the steady-state deviation in the speed. The derivative management aims to reduce the overshoot in the response. Figure 2 shows the block diagram of the LFC improved with the PID controller.
Figure 2. LFC improved with the PID controller
The comparison between the PID (Proportional Integral Derivative) controller and the FOPID (Fractional Order Proportional Integral Derivative) controller, as highlighted in the research of Izci and Ekinci [24], Energy, demonstrates the advancements made by adopting the FOPID controller. Here's the comparison of the two control systems based on the research:
PID Controllers: PID controllers are effective in various applications but struggle with complex or nonlinear systems due to their integer-order structure. High precision requires substantial tuning, and they can be resilient in steady situations but struggle with rapid changes or shifting conditions. Tuning parameters for adaptability can be challenging, and they can handle linear systems but may struggle with highly nonlinear systems.
FOPID Controller: FOPID controllers utilize fractional calculus to accurately simulate complex and nonlinear systems, enhancing control precision and adaptability to changing dynamics. Their fractional order structure provides stability margins and robustness against system changes and uncertainties. FOPID controllers accurately represent and regulate nonlinear systems, making them suitable for a wider range of systems due to their flexible method for capturing nonlinear behavior [25]. The study by Daraz et al. [26] favors the Fractional Order Proportional Integral Derivative (FOPID) controller over the regular PID controller due to its advantages. FOPID controllers can accurately describe and regulate systems with fractional order behavior, which is common in complex and nonlinear systems, such as renewable energy systems. They can manage highly nonlinear systems ideal for stable and efficient control. FOPID controllers also offer improved adaptability to changing system dynamics and diverse operating situations, particularly in hybrid systems with conventional and renewable sources. Additionally, FOPID controllers provide increased stability margins and robustness against uncertainties and disturbances, ensuring constant frequency regulation under diverse conditions.
3.1 Fractional order proportional - integral-derivative controller FOPID
The fractional order proportional integral and derivative (FOPID) controller deals with the orders of the derivative and is necessary as a fraction of integers. The control parameters in the scheme are the conventional gains Ki, Kp, Kd, in addition to the parameter λ, which is the order of the integral, and parameter μ, which is the order of the derivative. The transfer function of the FOPID is written in the form.
$K_p+\frac{K_i}{s^\lambda}+K_d s^\mu$ (4)
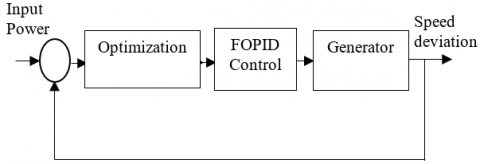
The FOPID controller is used to enhance the performance of the LFC during minor disturbances applied to the system. As seen in Figure 3, a slight increase in the absolute power by 0.2pu is applied to the generator to simulate the input disturbance. The controller improves the frequency response of the system to remove the deviation in the speed and reduce the settling time required by the system to reach the steady state condition. The transit search algorithm optimizes the controller parameters to attain better performance.
Figure 3. FOPID scheme for the LFC system
3.2 Transit search algorithm
Transit search is a meta-heuristic optimization algorithm based on the famous exoplanet exploration method used to discover a new planet. The technique detects the new world depending on the radiation change from the nearest star to that planet in a specific interval.
The search for the best solution in the proposed mathematical algorithm is the same as the search for a new planet from several solutions.
Two parameters in the transit search algorithm are known: the number of host stars and the signal-to-noise ratio. The product of the two parameters is equal to the amount of the initial population (Location) Lr of the algorithm [27].
There are five phases for implementing the TS, which include the phases of galaxy, star, transit, planet, neighbor, and exploitation.
The process begins with choosing a galaxy of random location Lr,
$\begin{aligned} & L_{r, l}=L_G+D-\text { Noise } \\ & l=1, \ldots \ldots,\left(n_s \times S N\right)\end{aligned}$
where, $L_G$ is the center of the galaxy,
D is the distance between the random location $L_r$ and the center of the galaxy $L_G$.
The location $L_r$ is updated by calculating the brightness radiating from the star through a mathematical formula and comparing the two areas where the planet can be detected. In such a way, the possible solution could be found between two updated location values.
The global solution of the technique is the best planet between the whole $n_s$ detected. Another investigation about the algorithm is found in study [27].
3.3Load Frequency Control in three area system
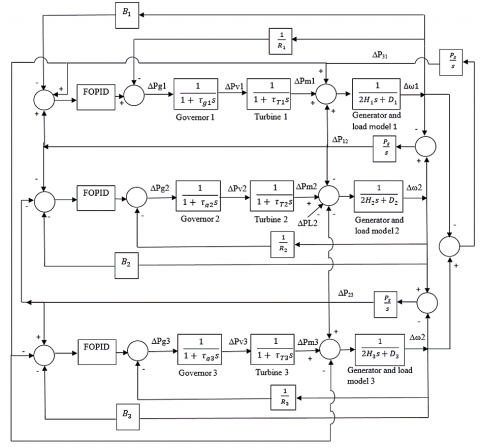
A multi-area system has more than one region and is connected through the tie-line. The control scheme function here is extended to be responsible not only for the frequency and the power in each area, but it should maintain the tie-line power on its mutual agreement. Each area should be able to meet its load demand. But in case of a shortage in one place, the demand should be compensated from the other regions through the tie-line, and the frequency change in one area affects the frequency in the rest of the system regions [28, 29]. A simple configuration of the LFC in an area system is shown in Figure 4, in which each area is represented by its generator main elements and load transfer function model. More details about the model are included in study [1].
Figure 4. LFC in three area system representation [1]
The FOPID controller in the scheme is used to remove the steady-state error (deviation) in the speed response. Also, it keeps the scheduled power flow in the tie-line within its limits. The controller has an input signal from the area bias factor B; the other signals come from the tie lines powers. The Area Control Error ACE for the area is written as
$A C E_i=\Delta P_{i j}+B_i \Delta \omega_i$ (5)
where, $\Delta P_{i j}$ is the tie-line power deviation between area i and area j, and $B_i$ is the frequency bias factor of area i, is equal to:
$B_i=\frac{1}{R_i}+D_i$ (6)
The study compares the performance of a regular PID controller and an improved Fractional Order Proportional Integral Derivative (FOPID) controller in a three-area Load Frequency Control (LFC) system using MATLAB Simulink. The simulation includes generators, loads, and tie-line connections, with a load adjustment of 0.2 per unit in Region 2. The system data are included in Table 1. The improved FOPID controller shows superior dynamic responses regarding system frequency and tie-line power. The study uses graphical representations to highlight the variations in system responses between the two controllers. The statistics and analysis aim to demonstrate the differences in responses produced by the traditional PID controller and the improved FOPID controller. The paper presumably analyzes the ramifications of these differences, illustrating how the enhanced dynamic responses produced with the optimized FOPID controller might boost the stability and performance of the three-area system under load variations. Fractional Order Controllers, notably FOPID, can more precisely simulate and manage complicated systems with fractional order dynamics. Systems with fractional order behavior are ubiquitous in power systems, especially with incorporating renewable energy sources. FOPID controllers offer versatility in capturing integer and fractional order dynamics, making them appropriate for various systems, including those with non-linear or time-varying features.
Table 1. The system under study parameters
|
Parameters |
Area 1 |
Area 2 |
|
Governor time constant $\tau_g$/sec |
0.2 |
0.3 |
|
Turbine time constant $\tau_T$/ sec |
0.5 |
0.6 |
|
Inertia constant H/pu |
5 |
4 |
|
Sensitive load frequency coefficient D |
0.6 |
0.9 |
|
Speed regulation R |
0.05 |
0.05 |
The study aims to optimize the FOPID controller for a three-area system, focusing on dynamic responses in system frequency and tie-line power during load variations. This is particularly important for power systems with complex and non-linear characteristics.
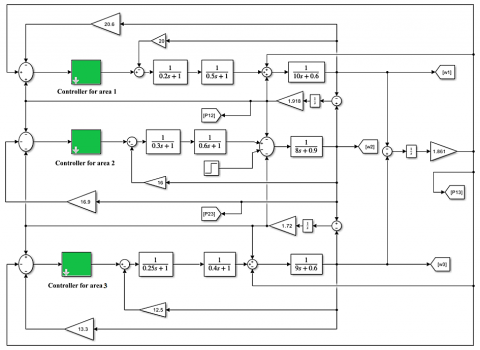
The system used in the work includes an area system simulated using Matlab Simulink, as seen in Figure 5. The LFC system is simulated with conventional PID and the optimized FOPID controller under a load change in area 2 by 0.2 pu. The results of the two controllers show how the optimized FOPID controller can improve the dynamic response of the system frequency and the tie-line power. The comparison in the figures aims to show the difference in the responses when using the two controllers’ schemes.
Figure 5. The studied three area systems with the FOPID controller
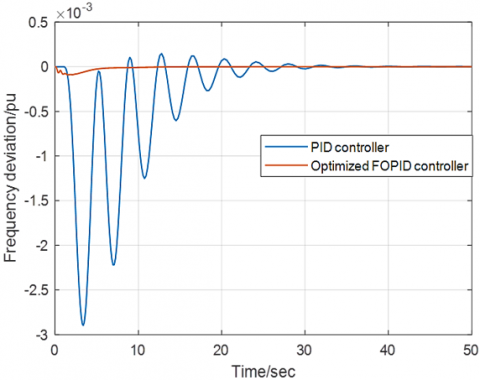
Figure 6. Response of frequency deviation in area 1
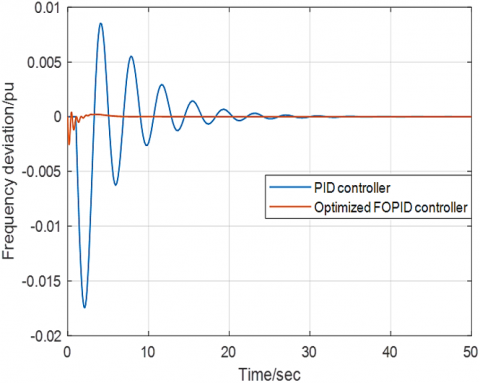
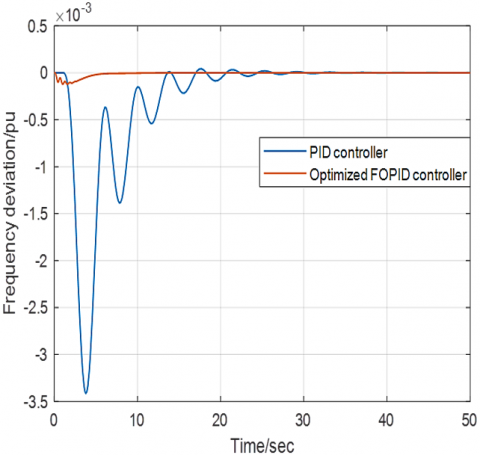
Figure 6, which shows the response of frequency deviation for area 1, implies how the peak overshoot and the peak undershoot are reduced very clearly by using the FOPID controller. The number of overshoots and undershoots also is fewer with the FOPID. The same advantage is shown from the response of frequency deviation for area 2 and area 3 in Figures 7 and 8 respectively. The settling time is also reduced in the frequency response for all three regions when using the FOPID controller.
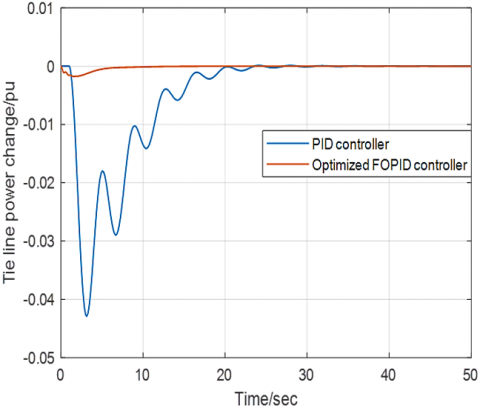
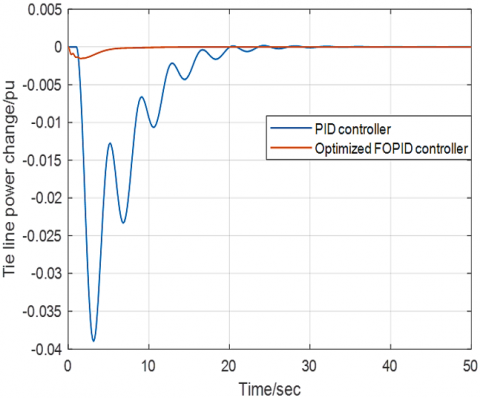
The response of the tie-line power change shown in Figures 9-11 illustrate how the dynamic response is improved when using the FOPID controller.
Figure 7. Response of frequency deviation in area 2
Figure 8. Response of frequency deviation in area 3
Table 2 shows a comparison in the overshoots in speed response of areas 1, 2 and 3.
Table 2. Comparison in overshoot of responses in area 1, area 2, and area 3
|
Controller |
Area 1 |
Area 2 |
Area 3 |
|
PID |
0.0029 |
0.0175 |
0.0034 |
|
Optimized FOPID |
0.00001 |
0.0025 |
0.000013 |
Figure 9. Response of tie-line 1-2 power change
Figure 10. Response of tie-line 2-3 power change
Figure 11. Response of tie-line 3-1 power change
Load Frequency Control (LFC) is crucial for power system stability and dependability, especially in three-area systems. A Fractional Order Proportional Integral Derivative (FOPID) controller optimized with Transit Search Optimization offers advantages like overshoot and settling time reduction. Overshoot occurs when the system reaction briefly exceeds the expected steady-state value, leading to instability or component damage. Minimizing overshoots smooths the system response and ensures stability by preventing extreme deviations from desired values. Stable systems minimize equipment malfunctions and maintain constant performance, reducing resource loss and optimizing energy source exploitation.
Table 3. Comparison in settling time of responses in area 1, area 2, and area 3
|
Controller |
Area 1 |
Area 2 |
Area 3 |
|
PID |
30.0 |
36.0 |
30 |
|
Optimized FOPID |
8 |
10 |
8 |
Table 4. Comparison in settling time of responses in Tie lines powers
|
Controller |
Line 1-2 |
Line 2-3 |
Line 3-1 |
|
PID |
35.0 |
36.0 |
30 |
|
Optimized FOPID |
12 |
12 |
10 |
Settling time is the timeframe for a system to reach and stay within a specified percentage of its final value after a disruption. Shorter settling times indicate quicker response to shocks, while faster settling times can quickly restore stability and operational parameters. Reduced settling time makes systems more resilient against sudden load changes or external perturbations. Stable systems are essential for reliable electricity grid operation, ensuring power delivery even in variable loads and unforeseen events. Efficient and stable systems optimize power generation resources, reduce waste, and reduce wear and tear on equipment, leading to lower maintenance costs and longer system lifespans.
Tables 3 shows comparison in the settling time of response of areas 1, 2, and 3. Whereas Table 4 shows a comparison in the tie line power settling time responses.
Looking for a comparison between the results of the dynamic performance of Load Frequency Control (LFC) using a Fractional Order Proportional Integral Derivative (FOPID) controller optimized with Transit Search Optimization in the context of a three-area system with results from other similar studies.
Comparing the precise configurations of the FOPID controller applied in the current study with those used in similar investigations:
The use of the FOPID controller comes with several advantages in different applications. The present work illustrates how the FOPID controller optimized with the transit search algorithm can improve the system's dynamic performance. Two schemes are studied in the paper for the LFC system; the first is the simple LFC with the conventional PID controller, and the other is the FOPID controller scheme. The parameters of the FOPID controller are optimized to minimize the frequency error (speed) and the tie line power change. A transit search optimization algorithm is employed to optimize the FOPID controller parameters. The comparison between the two controllers implies that the LFC system has better dynamic performance when using the FOPID controller. The overshoot, undershoot, and settling time of the frequency response are reduced by the aid of the fuzzy controller. The tie-line power response is also improved with the proposed controller.
The FOPID controller significantly reduces peak overshoot and undershoot in frequency deviation responses for all three sections, resulting in a more stable and controlled response. This reduces the potential for system instability or oscillations. The FOPID controller also significantly reduces settling time, the time taken to reach a stable condition following a disturbance, indicating a faster system response. The paper's "Dynamic Performance of Load Frequency Control of Three Area System Using FOPID Controller with Transit Search Optimization" findings are significant in power systems and control engineering. The improved stability prevents power grid failures, ensures continuous power supply, and minimizes blackout risks. A reliable and responsive Load Frequency Control system promotes effective utilization of energy resources. By minimizing errors and enhancing control dynamics, the system may optimize both conventional and renewable energy sources, resulting in energy conservation and reduced waste. The findings are particularly relevant in the context of renewable energy integration. Renewable energy sources often generate changes in power supply due to their dependence on environmental conditions. As demonstrated in the study, a robust LFC system ensures the smooth integration of renewables, promoting a sustainable and greener energy mix. The study focuses on the importance of stable power supply regulation for equipment wear and tear, reducing stress on components, and boosting the efficiency of the electrical grid. It suggests that power utilities and grid operators can use the enhanced FOPID controller with Transit Search Optimization to improve Load Frequency Control mechanisms, improving power system stability and dependability. However, the optimization process can be computationally intensive, especially in large-scale power systems. The study also acknowledges that the simulation model may not fully capture real-world complexities and variables, such as regulatory constraints, market dynamics, and environmental policies. The study suggests future research to implement the optimized FOPID controller on real-time hardware platforms and address issues related to computing resources, communication latency, and hardware limits for real-world applications.
|
∆Pref |
A change in the reference real power output of a generator or a power plant |
|
∆PV |
Change in valve position |
|
∆Pm |
It often denotes a change or deviation from the initial or nominal mechanical power input, which can be positive. |
|
Δω |
Speed deviation |
|
-∆PL |
This means that the active power demand has decreased by a certain amount |
|
R |
Speed regulation |
|
∆δ |
Rotor angle deviation |
|
Ps |
Synchronizing power coefficient between two areas |
|
∆Pl |
Non-frequency-sensitive load change |
|
∆Pg |
Change in governor power |
|
H |
Inertia constant |
|
B |
Frequency bias factor |
|
ACE |
Area control error |
|
D |
frequency-sensitive load coefficient |
|
τg |
Governor time constant |
|
τT |
Turbine time constant |
|
ωs |
Synchronous speed |
|
ki |
Integral controller gain |
|
kp |
Proportional controller gain |
|
kd |
Derivative controller gain |
[1] Hadi Saadat. (2002). Power System Analysis. Tata McGraw Hill 2002 Edition, New Delhi, India.
[2] Prakash, S., Sinha, S.K. (2011). Application of artificial intelligence in Load Frequency Control of interconnected power system. International Journal of Engineering, Science and Technology, 3(4): 264-275. https://doi.org/10.4314/ijest.v3i4.68558
[3] Dhanalakshmi, R., Palaniswami, S. (2011). Load Frequency Control of wind diesel hydro hybrid power system using conventional PI controller. European Journal of Scientific Research, 60(4): 630-641. https://doi.org/10.33263/Materials23.311317
[4] Hote, Y.V., Jain, S. (2018). PID controller design for load frequency control: Past, present and future challenges. IFAC-PapersOnLine, 51(4): 604-609. https://doi.org/10.1016/j.ifacol.2018.06.162
[5] Wu, Y., Song, Q. (2021). Improved particle swarm optimization algorithm in power system network reconfiguration. Mathematical Problems in Engineering, 2021: 1-10. https://doi.org/10.1155/2021/5574501
[6] Haque, M.T., Kashtiban, A.M. (2007). Application of neural networks in power systems; A review. International Journal of Energy and Power Engineering, 1(6): 897-901.
[7] Najim, S.A., Al-Omari, Z.A., Said, S.M. (2008). On the application of artificial neural network in analyzing and studying daily loads of Jordan power system plant. Computer Science and Information Systems, 5(1): 127-136. https://doi.org/10.2298/CSIS0801127N
[8] BaniMustafa, A., Al-Omari, Z. (2022). Trends of Electricity Consumption in Jordan. In 2022 International Engineering Conference on Electrical, Energy, and Artificial Intelligence (EICEEAI), Zarqa, Jordan, pp. 1-7. https://doi.org/10.1109/EICEEAI56378.2022.10050498
[9] Mishra, S.K., Panda, G., Meher, S. (2009). Chebyshev functional link artificial neural networks for denoising of image corrupted by salt and pepper noise. International Journal of Recent Trends in Engineering, 1(1): 413-417. https://www.researchgate.net/publication/254169394.
[10] Pedapenki, K.K., Swathi, G. (2017). Application of genetic algorithm in electrical engineering. International Journal of Pure and Applied Mathematics, 114(8): 35-43.
[11] Pandit, M., Dubey, H.M., Bansal, J.C. (Eds.). (2020). Nature Inspired Optimization for Electrical Power System. Springer, Singapore.
[12] He, H., Zhou, S., Zhang, L., Lin, J., Chen, W., Wu, D. (2020). Beetle swarm optimization algorithm-based load control with electricity storage. Journal of Control Science and Engineering, 2020: 1-8. https://doi.org/10.1155/2020/8896612
[13] Ayalew, M.F., Hussen, S., Pasam, G.K. (2018). Optimization techniques in power system. International Journal of Engineering Applied Sciences and Technology, 3(10): 2455-2143.
[14] Rehiara, A.B., Chongkai, H., Sasaki, Y., Yorino, N., Zoka, Y. (2017). An adaptive IMC-MPC controller for improving LFC performance. In 2017 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), Auckland, New Zealand, pp. 1-6. https://doi.org/10.1109/ISGT-Asia.2017.8378403
[15] Shouran, M., Anayi, F., Packianather, M. (2021). A state-of-the-art review on LFC strategies in conventional and modern power systems. In 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, pp. 268-277. https://doi.org/10.1109/ICACITE51222.2021.9404653
[16] Prakash, N.B., Karuppiah, N., Kumar, V., Vishnu, R.M., Yousuf, Z.M. (2018). Load Frequency Control of three area system using FOPID controller. WSEAS Transactions on Computer Research, 6: 36-42.
[17] Alhelou, H.H., Hamedani-Golshan, M.E., Zamani, R., Heydarian-Forushani, E., Siano, P. (2018). Challenges and opportunities of Load Frequency Control in conventional, modern and future smart power systems: A comprehensive review. Energies, 11(10): 2497. https://doi.org/10.3390/en11102497
[18] Raj, T.D., Kumar, C., Kotsampopoulos, P., Fayek, H.H. (2023). Load Frequency Control in two-area multi-source power system using bald eagle-sparrow search optimization tuned PID controller. Energies, 16(4): 2014. https://doi.org/10.3390/en16042014
[19] AboRas, K.M., Ragab, M., Shouran, M., Alghamdi, S., Kotb, H. (2023). Voltage and frequency regulation in smart grids via a unique Fuzzy PIDD2 controller optimized by Gradient-Based Optimization algorithm. Energy Reports, 9: 1201-1235. https://doi.org/10.1016/j.egyr.2022.12.054
[20] Hossam-Eldin, A.A., Negm, E., Ragab, M., AboRas, K.M. (2023). A maiden robust FPIDD2 regulator for frequency-voltage enhancement in a hybrid interconnected power system using Gradient-Based Optimizer. Alexandria Engineering Journal, 65: 103-118. https://doi.org/10.1016/j.aej.2022.10.029
[21] Kundur, P. (1994). Power System Stability and Control. New York: McGraw-Hill.
[22] Khan, I.A., Mokhlis, H., Mansor, N.N., Illias, H.A., Awalin, L.J., Wang, L. (2023). New trends and future directions in Load Frequency Control and flexible power system: A comprehensive review. Alexandria Engineering Journal, 71: 263-308. https://doi.org/10.1016/j.aej.2023.03.040
[23] Tong, X. (2023). Logic adaptive optimization model for dynamic temperature compensation of heating furnace based on proportion-integral-derivative position algorithm. The Journal of Engineering, 2023(4): e12261.
[24] Izci, D., Ekinci, S. (2023). Fractional order controller design via gazelle optimizer for efficient speed regulation of micromotors. e-Prime-Advances in Electrical Engineering, Electronics and Energy, 6: 100295. https://doi.org/10.1049/tje2.12261
[25] Liu, X., Qiao, S., Liu, Z. (2023). A survey on Load Frequency Control of multi-area power systems: Recent challenges and Strategies. Energies, 16(5): 2323. https://doi.org/10.3390/en16052323
[26] Daraz, A., Malik, S.A., Basit, A., Aslam, S., Zhang, G. (2023). Modified FOPID controller for frequency regulation of a hybrid interconnected system of conventional and renewable energy sources. Fractal and Fractional, 7(1): 89. https://doi.org/10.3390/fractalfract7010089
[27] Mirrashid, M., Naderpour, H. (2022). Transit search: An optimization algorithm based on exoplanet exploration. Results in Control and Optimization, 7: 100127. https://doi.org/10.1016/j.rico.2022.100127
[28] Zeng, H.B., Zhou, S.J., Zhang, X.M., Wang, W. (2022). Delay-dependent stability analysis of Load Frequency Control systems with electric vehicles. IEEE Transactions on Cybernetics, 52(12): 13645-13653. https://doi.org/10.1109/TCYB.2022.3140463
[29] Aravindh, D., Sakthivel, R., Kaviarasan, B., Anthoni, S. M., Alzahrani, F. (2019). Design of observer-based non-fragile Load Frequency Control for power systems with electric vehicles. ISA Transactions, 91: 21-31. https://doi.org/10.1016/j.isatra.2019.01.031