Punyavathi Ramineni* | Alagappan Pandian
© 2021 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Many pollution-related issues are raising due to the usage of conventional internal combustion engines (ICEs) vehicles. Electric Vehicles/ Hybrid electric vehicles (EVs/HEVs) are the finest solutions to overcome those problems associated with ICE-based vehicles. The EVs are introduced with a signal energy source (SES), which is not a successful attempt, especially during transient vehicles, driving, etc. Multiple energy sources (MES) EVs are introduced to attain better performance than the SES vehicles, which is obtained by combining two sources like battery/fuel cells, ultracapacitor. In this contest, energy management (EMNG) plays a vital role in sharing the load to the sources as per the EVs requirement. In the case of MES-based EVs, the controller always plays a significant role in the related EMNG system because it is the key factor in improving vehicle efficiency. In this article, a study has mainly been done related to several conventional, intelligent controllers and control algorithms to do the proper EMNG between sources present in the EV.
energy management system (ESS), electric vehicles, multiple energy source, controllers, battery/fuel cell, ultracapacitor
The clean energy system is motivated, works towards the development of the EVs/HEVs. This attempt will reduce conventional fuel consumption by vehicles that cause a green environment in the society. Nowadays, the EVs/HEVs are more popular in usage and are the alternative source to the traditional transportation system vehicles. The main part of any type of vehicle is the energy source. Normally, capable energy sources can deliver power to the vehicle during all road conditions. Size, cost, and efficiency are the major problems associated with battery-powered electric vehicles. Reducing unreliable current delivery by the battery is the better solution to overcome the problems associated with battery-based electric vehicles. Initially, one energy source model is introduced by combining the battery in parallel with the ultracapacitor (UC). The UC can deliver huge amounts of energy during transient and starting periods of the electric vehicle. On the Other Hand, the battery can store a bulk amount of energy and not deliver the current like UC. After successfully combining two energy sources, the need for peak and normal current of the load is attained.
1.1 Literature survey
An ADVISOR-Based Model is used to split the current between two energy sources battery/ultracapacitor. The control strategy (CS) used for the battery is to maintain the state of charge (SoC) between 60%–70% of its maximum capacity based on ADVISOR's standard for a parallel driven vehicle. The parallel combination of the two sources is initially to reduce the current in the battery to decrease the cost and increase efficiency. The main concentration is related to reducing the current delivery burden on the battery and not associated with the precise transition between energy sources [1]. A neural network (NNs) based energy management is developed and applied to the electric vehicle (EVs)/ hybrid electric vehicles (HEVs) for optimal power-sharing between energy sources. The developed model reduces the burden on the main source like battery/fuel cell by diverting transient current to the auxiliary source UC. This indicating that the auxiliary source supporting the main source during transient periods by reducing the crest power burden. The batteries/fuel cells have poor energy recovery character during regenerative braking, which is the main drawback associated with single-source powered vehicles. Generally, the generating power is utilized during fast acceleration timings of the EVs, which can only be achieved with HESS-powered EVs. In this, a standard test cycle is utilized during the overall system's experimental setup by taking sources as battery and UC. The brushless dc motor has chosen to propel the electric vehicle during all road conditions with a nominal rating and peak power rating of 32 kW, 53 kW. To measure and store the vehicle's data and the energy sources like the voltage, speed, current, and SOC, a digital signal processor (DSP) based measurement is used. The entire control technique is done based on the buck-boost converter operation.
Furthermore, the optimization of UC current and SOC is done with existed and proposed control techniques. Only a buck-boost converter is utilized, and the load is connected between two energy sources, whereas the UC is connected through the non-isolated buck-boost converter [2]. From a space application point of view, the conventional boost converter is not a desirable device. To achieve the continuous power transfer from DC to AC loads, a dual-mode bidirectional inverter (BDI) is proposed. The maximum power point tracking (MPPT) controller can develop the required signals of the BDI. The perturbation and observation (P&O) approach is adopted to develop required signals to the MPPT controller [3]. The hybrid series vehicle is designed with a supercapacitor as a supporting source. The proposed method's test bench prototype includes two diesel engines through individual alternators and two batteries separately. Here supercapacitors are used to support the batteries from sure currents supply which is required by the load like sudden load change and stating period. Another main advantage of the supercapacitor is to provide a high amount of power to the DC link with a short period based on the load condition on the overall circuit. Many DC/DC topologies are adopted and implemented to the main circuit to attain the electric/hybrid electric vehicle's optimal operation. In this various converter, topologies are discussed along with the conventional controller action. Moreover, no advanced/intelligent controllers are adopted here because the chosen model is difficult for practical implementation [4].
An optimized topology was proposed to reduce the components' size in the MES system of the plug-in hybrid electric vehicle (PHEV). To identify the size optimization factor of the proposed work, a battery-sourced vehicle (BSV) has been taken as the reference of comparison, and the dynamic programming algorithm is utilized for this scenario. With this approach, the maximum power the over obtained, and based on this factor the battery and supercapacitors' maximum capacities are allocated optimally. The adopted model also reduces the fuel consumption of the vehicle, which further improves the batteries. Two different control algorithms, deep learning (DP) and linear programming (LP) improve the fuel economy and battery lifetime. Multiple control algorithms optimize vehicle performance by reducing the burden on the battery and sharing the crest load current from the supercapacitor.
Moreover, to obtain the overall optimized system model exclusive model for supercapacitor is required [5]. The Fractional Order PID (FOPID) and PID controller are used to obtain the microgrid applications closed-loop operation. After that, a suitable control scheme is proposed for the particular application [6].
To meet the electric vehicles' load requirement, two different character electrical sources are adopted, for the MES system is considered with battery and ultracapacitor. An enhanced frequency algorithm was proposed to the MES system to obtain a better delay time during switching of the energy source as per the vehicle requirements. The delay in responding to the energy source mainly impacts the system's transient response, which again limits the bandwidth of the inner current loops. This slow response will affect the DC link voltage settling time, which is not a desired phenomenon to the entire system model. To obtain a faster response from the system, the transient current was delivered by the UC utilizing the proposed optimal algorithms. To maintain the nominal voltage level and other constraints in the system, an energy management strategy was proposed, enabling the safe and efficient operation of the overall system. In the entire scenario, the UC voltage loop plays a vital role in maintaining the DC link voltage as desirable as the electric vehicles' requirement. Various bandwidth-based analyses are done related to the UC voltage control loop. After that, the experimental set is carried out with a microcontroller to know the proposed methodology's effectiveness. In the entire work scenario, UC response time plays the main role and is mostly concentrated on maintaining UC current responses as optimal using the control algorithm. This has been done with different bandwidths using separate devices like digital bandwidth changes [7]. An improved Z-source converter is used to obtain the variable DC voltage from the fixed DC to avoid the voltage stress at switches and obtaining continuous input current value. The intended converter is used to perform buck and boost operation, diminishing the inrush current in the circuit [8].
In electric vehicles application, supervisory energy management plays a key role in switching the energy source to attain optimal performance. The low pass filter design also plays an important role in the energy management system because it does not require complete design specifications of passband and stopband capacities. In this, a step-by-step method was adopted for designing the digital low pass filter for energy management control. The battery and supercapacitor's mathematical model are developed based on the impedance functions of the system. In the final set of control, the digital low pass filter is integrated with the fuzzy logic controller to get better results during energy management control and ensure the supercapacitors' safe operation. A SOC monitoring scheme was also developed. An Urban Dynamometer Driving Schedule model is considered to perform the MATLAB/Simulink based on the proposed scheme. In work, two different models are considered to do energy management between battery and supercapacitor. In that rule-based FLC is required, and another one is a digital low pass filter. The successful execution of the proposed scheme system's impedance model is required along with the predetermined vehicle conditions, which can be obtained from the standard test drive cycle [9]. Optimal allocation of distribution generation (DG) is one of the key issues to attain better power quality with reliable power transmission. The localized generation is done with PV and wind power generation. Several controller schemes are utilized to do the proper DG allocation, including traditional techniques, which are used to know the better-performed controller [10].
Real-time combined power flow and speed control schemes are proposed for the battery/supercapacitor of the electric vehicle by considering a nonlinear control scheme. In this HESS, the sizing model is developed for optimal power-sharing between the battery and supercapacitor and the electric vehicle's control model. The main intention of the designed controller is to measure and track the speed of the electric vehicles; with that ability to know the current requirement of the load based on this, the controller will reduce the stress on the battery. To carry out the MATLAB/Simulink model of the proposed model, a standard urban dynamometer driving schedule and a recorded actual city driving cycle are considered. A compound control scheme is used for speed tracking and hybrid energy storage system (HESS) sizing. This proposed scheme is effectively working in urban area roads only. These schemes will not work in hilly and high-slope areas [11]. Three-phase to five transition advantage has considered designing the five-phase induction drive. This designed model's main advantage is to obtain the degrade less performance even one failure case also [12]. The cost of and performance of a HESS-based electric vehicle system mainly depends upon the sizing of battery, UC, and control of the energy flow from source to the load. In the plug-in electric vehicle, the combined research problem associated with sizing and control still existed in that particular area.
A novel control structure is formulated to minimize the operating cost of the system. To find the transient behavior of the battery, one deprivation model is utilized, which is used to know the loss and life cycle of the battery. To get the optimal current sharing between the battery and the UC Dynamic programming algorithm is used. The sizing of HESS and optimal power distribution is treated as a single cost minimization problem. Using the Dynamometer Driving Schedule MATLAB/Simulink model of the proposed model is resolved.
Moreover, during the real-time implementation of the proposed technique Markov chain and stochastic dynamic programming methods are utilized. A novel dual-loop framework is used to minimize the system has minimized cost and optimal power-sharing between sources. However, this approach not concentrating on reducing the computing time and enhancing the optimization accuracy of stochastic dynamic programming [13]. Identification of faulty areas in a multi-terminal transmission line is very difficult and shows more impact on the system's continuous supply. A deep NN (DNN) based model has been derived from achieving the proper fault location, making the design of a reliable system model [14].
Using the switched capacitor structure, a novel bidirectional converter is proposed for HESS-powered electric vehicles. The intended converter model reduces voltage stress on the switching devices with high voltage gains used in the system. To improve the efficiency of the overall system, the synchronous rectification method is utilized. All those simulation models are carried out for high power ratings; on the other hand, the experimental prototype model is done with scale-down values. For the successful operation of the proposed model, a total of six switches are used for boost mode and buck mode of operation of the circuit, for charging and discharging periods of the energy sources. These features allow the converter to operate efficiently at high voltage gains without the need to operate at extreme values of duty cycle values, making the presented topology an excellent interface for electric vehicles' energy storage units and the dc-link of the inverter. The six switches cause extra switching losses, hike the overall system cost [15]. A combination of battery and UC forms HESS; likewise, two semi-active HESS are considered and done in an electric vehicle application. The comparison of two semi-active HESS is done based on the battery and UC sizing as per the applied load on the electric vehicle. The low pass filter model is prescribed for proper current sharing between two energy sources. All component losses are notified in the circuit to the identified difference between the proposed two semi-active HESS.
Moreover, for the configurations, a common control technique is used for proper load sharing based on the standard NEDC driving cycle. Finally, one better controller is suggested based on the losses present in the two configurations used for the final model representation in real-time implementation. In this work, the authors mainly concentrated on developing various HESS with common control structures for proper load between two energy sources [16]. An ANN-based MPPT is adopted to attain the maximum power from the PV system. This phenomenon improves the overall system efficiency corresponding to the all-weather conditions [17].
The FLC-based energy management is done in the case of HESS powered electric vehicle. A real-time model is developed on different semi-active HESS, consisting of battery and supercapacitor as a main supporting source. The filter is also used along with the fuzzy logic controller for more accuracy to control the power flow from source to load. With the arrangement, the battery's peak current burden is diverted to the supercapacitor by maintaining the voltage levels within the desired levels. The comparative analysis is mainly done based on the corrected model and the old model of the battery. The total tree predetermined driving cycles, new European drive cycle, highway driving cycle, and Indian urban driving cycle are considered to know the derived model's effectiveness. The work research mainly focuses on improving the battery's lives, and this phenomenon was proved by considering three different driving cycles to know the predetermined data of the vehicle [18]. The self-tuning PI controller, including PSO, is considered to obtain the induction motor's ripple-free torque and better control [19].
To extend the plug-in vehicle's driving range, a semi-active HESS is considered with battery and capacitor banks as per the load requirements. The model's complete structure includes two electrical motors, a gearbox, a gas engine, and a clutch to move the vehicle forward successfully. In this arrangement, the capacitor banks are connected to the vehicle directly. The Li-ion battery is connected to the capacitor bank through the DC-DC converter, which helps determine and share the current between the battery and capacitor bank optimally. Here, the power-sharing between two sources happens because of the chosen real-time controller; on the other hand, the entire model's optimal solution is calculated using dynamic programming. A separate structure Kalman Filter is used for the Estimation of Li-ion Capacitor open-circuit voltage. Furthermore, for experimental validation, a US06 Drive Cycle was taken to identify the predetermine road conditions, which are useful to know the proposed method's performance effectively [20]. The FLC-based control technique reduces the harmonic content and controls the output side DC voltage of the active power filter. The switches' required pulse is produced based on the Space Vector Pulse Width Modulation (SVPWM) [21].
A real-time control technique is proposed for plug-in electric vehicle applications to obtain the proper power distribution between the battery and UC of the energy storage system. Here the two energy sources consisting of complementary characteristics in the view of power and energy densities. The proposed model's key objective is to improve the battery's life cycle, vehicle driving range and maintain the UC voltage within limits during peak current delivering timings. A multi-objective optimization problem is formulated; after that, three objective functions are converted into a single problem to reduce the complexity. To solve the final problem, the Karush-Kuhn-Tucker conditions are utilized. Final simulation work is carried out to a single battery source case and multiple energy storage cases using different predetermined driving cycles with a real-time controller, which helps find the better-performed storage system. The entire work was done related to the single power source comparisons with HESS performance with a single controller. The multiple energy driving cycles are considered with a single control technique [22]. An operational control scheme is required to meet the improved energy-efficient factors of HESS-sourced electric vehicles. It is evident that, before implementing the proposed control schemes into the real-time world, the test bench evaluation is mandatary based on the successfully obtained simulation model parameters. Two optimized control model is proposed in the MATLAB/Simulink environment, to apply real-time implementation to the electric vehicle. Pre-programmed load values are utilized to know the better control technique among all proposed [23]. A new high gain 3-port converter is modeled for fuel cell and battery-powered HEV to the micro-grid to get the better-performed output values [24].
The battery age was improved with the HESS, which includes UC as an extra power source used to supply peak currents to the load during abnormal conditions. To achieve this, an effective real-time energy management scheme is required corresponding to a real-time driving cycle. A novel Pontryagin’s minimum principle is applied to the HESS system to optimize the energy storage system. However, this proposed method is carried out for the offline model, and to evaluate the same data online, it should require an extra device that might improve the overall system cost a little bit. Further, the adopted model scheme results are compared with the other relevant model outcomes performed in Simulink and real-time environment [25].
Due to the power electronic devices' presence, the harmonic content in the overall system will increase, which again affects the quality of the power. To overcome those hazards, and improved ANN and neuro-fuzzy control model are used [26].
Figure 1. Chart representation related to carbon emissions in the world
Production of the carbon content causes many environmental uses, which will affect the greenery of the particular country. Figure 1 shows the chart represents the carbon share of an individual country, in which 28% of carbon emissions are produced from china, and 7% of emissions are produced from India. The ICE-based vehicle is one of the major responsible factors for producing the atmosphere's carbon emission due to fossil fuels used for its successful drive. To reduce the carbon emissions percentage, the world moved words development of HEVs/EVs, and here EVs are responsible for zero-emission, which is not possible with HEVs. Because the HEVs include ICE plus electric motor, which will develop little bit lesser carbon emissions than the conventional ICE vehicles.
The EVs or hybrid electric vehicles (HEVs) era has mainly been stated to suppress conventional fuel consumption, reducing the pollution effect in the environment. During this proposal, several configured HEVs/EVs are made to meet the people's requirements.
Figure 2 illustrates the structure of the series HEV. In these two different character energy sources, these are associated in series. This type of design is most suitable for urban area roads, and this will work approximately 25% of efficiency. Here, the ICE works up to its maximum efficiency by maintaining relationships with the battery's state of charge (SOC).
Figure 2. Block diagram representation of the series HEV model
Figure 3. Block diagram representation of parallel HEV model
Figure 3 shows the HEV parallel configuration. Two different sources are connected in parallel, which feeds the corresponding engines/motors again as per the drive load conditions. This structure's main advantage is attaining better efficient performance than a series combination that will approximately equal to 50%. Due to its construction view of this structure, the vehicle's overall weight will reduce, which means the fuel tank and battery size also reduce drastically compared to the series combination structure. However, this type of structure is more suitable for vehicles moving freely without speed-breakers like highways.
Another structure for HEV is introduced by combining previous combinations named as a series-parallel combination to get all benefits from two configurations. With this arrangement, vehicles will be able to run smoothly in urban and highway areas, but which increases the overall weight of the system and affects the overall efficiency. In all the mentioned scenarios, the transition between energy sources is difficult as per the power train requirement. To make an easy transition between the sources, several control techniques are introduced on the application. At the time of EVs' invention, they are modeled with a signal energy source like a battery called battery-powered EVs (BPEVs). Electrical motor and power electronics switches are utilized to propel the vehicle successfully instead of conventional ICE-based vehicles. However, this attempt is not successful mainly due to driving range and cost. After that, hybridized energy source EVs are introduced, combining the main source with an alternating source like UC, which provides better outputs than the BPEVs. This happens due to the high power capacitor of the UC, which is very much useful during transient times. The power required by the load is captured from the two sources during acceleration periods. Moreover, the energy sources take power from the load during regenerative breaking periods through the DC-DC converters [27].
The DC-DC converters play the finest role in HEV/EV application converters to reduce the energy sources' size and control the energy flow from source to load depending upon the vehicle requirement. Different models are used for specific applications that may be non-isolated or isolated converters with MOSFETs/IGBTs.
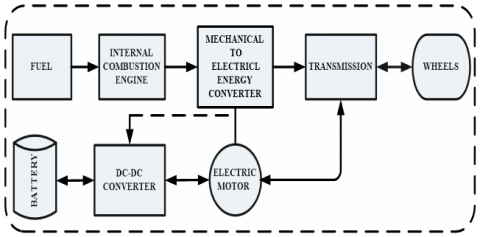
Figure 4 shows one type of hybridized model of EV with converters and energy sources. In this case, UC is connected to the DC bus through a bidirectional converter (BDC), whereas the battery is connected directly to the DC bus. Depending upon the electric motor type DC-AC converter is also connected between the DC bus and the motor. In this configuration, eight switches are required in that two are for BDC, and the remaining six are for inverter operation. The traditional DC-DC converters model for the buck, boost, and buck/boost operation usually comes under the non-isolation category. In the EV's complete operation, the BDC operation plays a crucial role in sending power from the source to load vice versa. Generally, MES contains battery/fuel cell as the main source and UC as the auxiliary source, which is used to give support to the main source during transient load behavior. The parallel connection of two energy sources is the most perforable and economical approach, reducing the overall system cost.
Figure 4. Block diagram representation of series-parallel HEV model
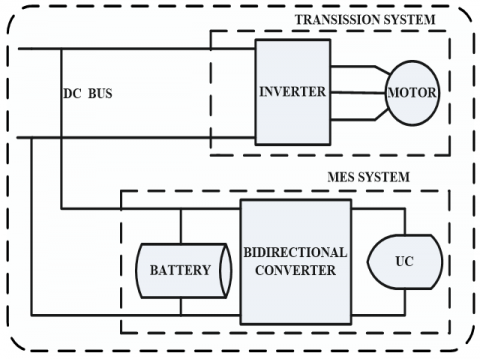
plications, especially for MES system power-sharing as per the vehicle requirement. Normally, the EMS is required where two or more sources are present to drive the vehicle, which is used to control the power flow among the energy source depending upon the EV requirement. For example, in an HEV vehicle, the battery will act as an auxiliary source. The ICE is the main model to propel the vehicle; because of hybridization, the ICE's fuel will be reduced to a considerable quantity. Moreover, the battery charging is done through converters at the changing stations' end; here, the charging and discharging time of the battery is controlled by the SOC. This means the SOC of the battery plays an important role in absorbing and delivering power from the battery. In pure EVs, the fuel cell/battery acts as the main source, and other sources like UC will act as the supporting sources; in this scenario also for proper distribution of power between the source, one efficient control technique is required. The control techniques are very complicated, implemented in the EVs/HEVs due to the vehicle's composite design. Figure 5 illustrates the various control methods used in EVs/HEVs application, making less fuel consumption by the vehicle [28, 29].
Figure 5. Traditional block diagram representation of the EVs/HEVs with MES system
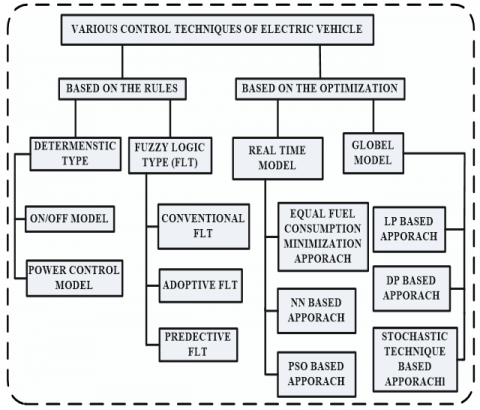
Figure 6. Illustrating the various control techniques of the HEVs/EVs
Figure 6 representing the various control approaches of the EM system to achieve the proper power-sharing of energy sources as per the EV requirement.
Several control techniques are available, which main adopted corresponding to rule-based and optimization-based techniques. Those are discussed one by one in a short form as follows.
4.1 Rule-based control strategies
The circuit operation is the main parameter to implement this technique, and with this simple power, flow can be achieved in the vehicle's hybridized energy system. This comes under the static controller category; without prior information of the drive cycle, the rules are famed based on the mathematical models or human intelligence. To meet the EV/HEV driver's driver requirements in a precise way, the plot points are chosen at the motor, generator, and ICE engine end, and the final decision of the proposed method was worked based on the instantaneous inputs of the vehicle [30].
4.2 Deterministic rule-based control strategy
In this, the rules are framed based on the fuel consumed, the number of emissions produced, the power flow, and the vehicle's driving data. The power demand between the electric motor and ICE rules is framed based on the lookup table obtained from the driver data. An effective control approach is developed for the parallel HEV for consuming less fuel during the dynamic operation of the EV/HEV [31].
4.3 Fuzzy rule-based control (FLC) strategy
This strategy deals with the numerical data and linguistic labels separately, represented in several sets like big, very big, small, very small, zero, negative big, negative small, etc. The FLC is realization and implementation are easy to compare to other approaches and has a strong structure. The FLC's logic is obtained from several fuzzy sets, which mainly deals with the output of the system, not with the accuracy. The intelligent controller is evaluated from the FLC from the rule base behavior of the system. To frame the various rules of a particular system, expert knowledge is required; based on these expertise rules, the decision is taken.
4.4 Optimization-based control strategy
This method's key feature is obtaining the cost-effective, objective function, which includes consuming the fuel and emission produced by the EV/HEV. Normally, fixed DC is adopted to obtain the individual system's solution using the Global optimum solution. The system's control model uses this type of strategy, not a realistic one, which is obtained from the instantaneous cost function.
4.5 Global optimization
This optimization technique requires complete data of the driving cycle without knowing the prior information; this technique cannot be applied to the system. The driving cycle information means SOC of the energy source, driver requirements, etc. This fact increases the complexity level of the global optimization during computation time, thus restricting the implementation of real-time applications. To set the proper EM of the EV/HEV, several programming methods are introduced based on the global optimization technique, which reduces the cost of the fuel and emission produced by the vehicles [32].
4.6 Real-time optimization
This technique overcomes the problems associated with global optimization due to the instantaneous dependency of the system. In this, the present state of the cost function is considered with the difficulty of achieving a real-time solution. In this case, the real-time value of the SOC is considered and done the precise power-sharing between the source as per the dynamics of the vehicle [33].
Table 1. A comparison chart of different control techniques
|
Controller type Parameter |
FLC |
GA |
PSO |
DP |
NN |
Power control model |
Model predictive |
Pontryagin’s minimum principle |
Stochastic dynamic programming |
|
Prior Knowledge |
Required |
Not Required |
Not Required |
Required |
Required |
Not Required |
Not Required |
Required |
Not Required |
|
Design complexity |
Easy |
Difficult |
Easy |
Difficult |
difficult |
difficult |
Easy |
Easy |
difficult |
|
Solution time |
Less |
More |
More |
More |
Less |
Less |
Less |
Less |
More |
|
Solution type |
Global |
Global |
Global |
Global |
Global |
Global |
Global |
Local |
Global |
Table 1 illustrating the different rule-based and optimization techniques caparisons based on the four factors. In which solution time, construction during complexity, type of solution, and driver cycle predetermined values are projected, the controller's predictive model performs better. The PSO-based technique provides not many rousts as per the project four parameters point of view [34-39].
Several possible solutions and approaches are formulated for precise EM between the sources as per the vehicle dynamics. The method is from a conventional controller to the rule-based models and optimization models. All of the mentioned models are unable to fulfill battery advantages like reliability and thermal stability. This happens because of communication parameters identification between the drive cycle and the developed control model. To overcome this problem, effective work is done related to the vehicle's dynamics and power demand by the driver cycle. For most of the proposed techniques, real-time implementation is a difficult task, which considered several parameters like current, voltage, SOC as an input to attain the proper power distribution between sources. This takes more time response from the adopted controller; to avoid this situation, more focus is shown towards fewer parameters based inputs to the controller, which provides the fast response.
In the case of all EVs/HEVs, the control technique depends upon the converter topology and nature of the source connected in the MES. This indicates that the selected control technique is based on the converters' nature in the HEV/EV structure. The ESS is one of the primary issues related to the HEVs/EVs for its successful propulsion. Several control techniques are proposed based on the rules/mathematics/real-time models/prediction of the driver requirements to obtain the power-optimized vehicle model. Among all the techniques, the rule-based one is easily implemented to the MES vehicles; this model cannot give better results in optimized fuel consumption. Better fuel optimization is possible with the global optimization approach, but which required real-time prior information, the vehicle is required. Moreover, all real-time techniques can provide good results with strong construction.
|
SES |
Signal Energy Source |
|
ICEs |
Internal Combustion Engines |
|
EVs/HEVs |
Electric Vehicles/ Hybrid Electric Vehicles |
|
MES |
Multiple energy sources |
|
EMNG |
Energy Management |
|
UC |
Ultracapacitor |
|
CS |
Control strategy |
|
SOC |
State of Charge |
|
NNs |
Neural Networks |
|
DSP |
Digital Signal Processor |
|
PHEV |
Plug-In Hybrid Electric Vehicle |
|
BSV |
Battery-Sourced Vehicle |
|
DP |
Deep Learning |
|
LP |
Linear Programming |
|
FLC |
Fuzzy Logic Controller |
|
HESS |
Hybrid Energy Storage System |
|
BPEVs |
Battery-Powered EVs |
|
DC |
Direct Current |
|
ESS |
Energy Storage System |
|
BDI |
Bidirectional Inverter |
|
P&O |
Perturbation and Observation |
|
MPPT |
Maximum Power Point Tracking |
|
FOPID |
Fractional Order PID |
|
DG |
Distribution Generation |
|
SVPWM |
Space Vector Pulse Width Modulation |
[1] Baisden, A.C., Emadi, A. (2004). ADVISOR-based model of a battery and an ultra-capacitor energy source for hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 53(1): 199-205. https://doi.org/10.1109/TVT.2003.822004
[2] Moreno, J., Ortúzar, M.E., Dixon, J.W. (2006). Energy-management system for a hybrid electric vehicle, using ultracapacitors and neural networks. IEEE Transactions on Industrial Electronics, 53(2): 614-623. https://doi.org/10.1109/TIE.2006.870880
[3] Srikanth, M., Pakkiraiah, B., Upadhyay, P., Kalyani, S.T. (2019). Dual-mode photovoltaic bidirectional inverter operation for seamless power transfer to DC and AC loads with the grid interface. International Journal of Photoenergy. https://doi.org/10.1155/2019/8498435
[4] Camara, M.B., Gualous, H., Gustin, F., Berthon, A. (2008). Design and new control of DC/DC converters to share energy between supercapacitors and batteries in hybrid vehicles. IEEE Transactions on Vehicular Technology, 57(5): 2721-2735. https://doi.org/10.1109/TVT.2008.915491
[5] Bai, Y., Li, J., He, H., Dos Santos, R.C., Yang, Q. (2020). Optimal design of a hybrid energy storage system in a plug-in hybrid electric vehicle for battery lifetime improvement. IEEE Access, 8: 142148-142158. https://doi.org/10.1109/ACCESS.2020.3013596
[6] Srinivasarao, B., Lalitha, S.V.N.L., Sreenivasarao, Y. (2019). Evaluation of Closed-Loop-PID, Fractional-Order-PID and proportional resonant controlled micro-grid-schemes. Journal of Computational and Theoretical Nanoscience, 16(5-6): 2479-2487. https://doi.org/10.1166/jctn.2019.7919
[7] Joshi, M.C., Samanta, S. (2020). Energy management with improved frequency sharing based control for battery/ultracapacitor hybrid energy system in the presence of delay. IET Power Electronics, 13(10): 2019-2028. https://doi.org/10.1049/iet-pel.2018.5118
[8] Pakkiraiah, B., Dharani, P., Jaswanth, V., Prasad, N.D., Agarwal, A., Ravikiran, K. (2018). Dynamic performance and analysis of an asynchronous motor drive with the interface of z-source isolated Bi-directional DC-DC converter. 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, pp. 1403-1408. https://doi.org/10.1109/RTEICT42901.2018.9012543
[9] Salari, O., Hashtrudi-Zaad, K., Bakhshai, A., Youssef, M. Z., Jain, P. (2020). A systematic approach for the design of the digital low-pass filters for energy storage systems in EV applications. IEEE Journal of Emerging and Selected Topics in Industrial Electronics, 1(1): 67-79. https://doi.org/10.1109/JESTIE.2020.2999508
[10] Sridevi, J., Rani, V.U., Rao, B.L. (2019). Integration of renewable DGS to radial distribution system for loss reduction and voltage profile improvement. 2019 1st International Conference on Electrical, Control and Instrumentation Engineering (ICECIE), Kuala Lumpur, Malaysia, pp. 1-6. https://doi.org/10.1109/ICECIE47765.2019.8974670
[11] Zhang, L., Ye, X., Xia, X., Barzegar, F. (2020). A real-time energy management and speed controller for an electric vehicle powered by a hybrid energy storage system. IEEE Transactions on Industrial Informatics, 16(10): 6272-6280. https://doi.org/10.1109/TII.2020.2964389
[12] Jyothi, B., Rao, V.G. (2017). M. Fabrication of 3-phase to 5-phase conversion and analysis of laboratory five phase induction drive. J. Electr. Eng., 17(1): 496-503.
[13] Lu, X., Wang, H. (2019). Optimal sizing and energy management for cost-effective PEV hybrid energy storage systems. IEEE Transactions on Industrial Informatics, 16(5): 3407-3416. https://doi.org/10.1109/TII.2019.2957297
[14] Rao, Y.S., Varma, P.S. (2019). Combination of MW and deep neural network based fault location identification for multi-terminal transmission systems. International Journal of Simulation--Systems, Science & Technology, 20(1): 1-6.
[15] Elsayad, N., Moradisizkoohi, H., Mohammed, O.A. (2019). A new hybrid structure of a bidirectional DC-DC converter with high conversion ratios for electric vehicles. IEEE Transactions on Vehicular Technology, 69(1): 194-206. https://doi.org/10.1109/TVT.2019.2950282
[16] Asensio, M., Magallan, G., Amaya, G., De Angelo, C. (2018). Efficiency and performance analysis of battery-ultracapacitor based semi-active hybrid energy systems for electric vehicles. IEEE Latin America Transactions, 16(10): 2581-2590. https://doi.org/10.1109/TLA.2018.8795138
[17] Bhupanapati, P., Pallam, P., Haribabu, C.H., Hemanth, V.K., Gubba, S., Arisetti, M., Sreelatha, E. (2019). Asynchronous motor drive's improved performance and analysis with a new modified artificial neural network based MPPT controller. 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, pp. 1-6. https://doi.org/10.1109/ICACCP.2019.8882880
[18] Zhang, Q., Li, G. (2019). Experimental study on a semi-active battery-supercapacitor hybrid energy storage system for electric vehicle application. IEEE Transactions on Power Electronics, 35(1): 1014-1021. https://doi.org/10.1109/TPEL.2019.2912425
[19] Rekha, M., Malligunta, K.K. (2019). Variable frequency drive optimization using torque ripple control and self-tuning PI controller with PSO. International Journal of Electrical and Computer Engineering, 9(2): 802.
[20] Kollmeyer, P.J., Wootton, M., Reimers, J., Opila, D.F., Kurera, H., Kadakia, M., Emadi, A. (2019). Real-time control of a full scale Li-ion battery and Li-ion capacitor hybrid energy storage system for a plug-in hybrid vehicle. IEEE Transactions on Industry Applications, 55(4): 4204-4214. https://doi.org/10.1109/TIA.2019.2911057
[21] Somlal, J., Rao, M.V.G., Karthikeyan, S.P. (2016). Experimental investigation of an indirect current controlled Fuzzy-SVPWM based shunt hybrid active power filter. 2016 IEEE Region 10 Conference (TENCON), Singapore, pp. 801-806. https://doi.org/10.1109/TENCON.2016.7848115
[22] Lu, X., Chen, Y., Fu, M., Wang, H. (2019). Multi-objective optimization-based real-time control strategy for battery/ultracapacitor hybrid energy management systems. IEEE Access, 7: 11640-11650. https://doi.org/10.1109/ACCESS.2019.2891884
[23] Herrera, V.I., Milo, A., Gaztañaga, H., González-Garrido, A., Camblong, H., Sierra, A. (2018). Design and experimental comparison of energy management strategies for hybrid electric buses based on test-bench simulation. IEEE Transactions on Industry Applications, 55(3): 3066-3075. https://doi.org/10.1109/TIA.2018.2886774
[24] Srilatha, A., Pandian, A. (2018). A high-gain three port converter integrated with PV/fuel cell/battery sources designed for HEV & dc-micro grid. HELIX, 8(2): 3036-3040.
[25] Nguyen, B.H., German, R., Trovão, J.P.F., Bouscayrol, A. (2018). Real-time energy management of battery/supercapacitor electric vehicles based on an adaptation of Pontryagin's minimum principle. IEEE Transactions on Vehicular Technology, 68(1): 203-212. https://doi.org/10.1109/TVT.2018.2881057
[26] Somlal, J., Rao, M.V.G. (2016). Performance analysis of artificial neural network and neuro-fuzzy controlled shunt hybrid active power filter for power conditioning. Advances in Human Factors, Business Management, Training and Education, pp. 287-302. https://doi.org/10.1007/978-81-322-2671-0_28
[27] Katuri, R., Gorantla, S. (2020). Realization of prototype hardware model with a novel control technique used in electric vehicle application. Electrical Engineering, 102(4): 2539-2551. https://doi.org/10.1007/s00202-020-01052-0
[28] Tie, S.F., Tan, C.W. (2013). A review of energy sources and energy management system in electric vehicles. Renewable and Sustainable Energy Reviews, 20: 82-102. https://doi.org/10.1016/j.rser.2012.11.077
[29] Panday, A., Bansal, H.O. (2014). A review of optimal energy management strategies for hybrid electric vehicle. International Journal of Vehicular Technology. http://dx.doi.org/10.1155/2014/160510
[30] Shaohua, L., Changqing, D., Fuwu, Y., Jun, W., Zheng, L., Yuan, L. (2012). A rule-based energy management strategy for a new BSG hybrid electric vehicle. 2012 Third Global Congress on Intelligent Systems, Wuhan, China, pp. 209-212. https://doi.org/10.1109/GCIS.2012.63
[31] Kim, C., NamGoong, E., Lee, S., Kim, T., Kim, H. (1999). Fuel economy optimization for parallel hybrid vehicles with CVT. SAE transactions, 2161-2167.
[32] Delprat, S., Guerra, T.M., Paganelli, G., Lauber, J., Delhom, M. (2001). Control strategy optimization for an hybrid parallel powertrain. Proceedings of the 2001 American Control Conference. (Cat. No.01CH37148), Arlington, VA, USA, pp. 1315-1320. https://doi.org/10.1109/ACC.2001.945905
[33] Johnson, V.H., Wipke, K.B., Rausen, D.J. (2000). HEV control strategy for real-time optimization of fuel economy and emissions (No. 2000-01-1543). SAE Technical Paper.
[34] García, P., Torreglosa, J.P., Fernández, L.M., Jurado, F. (2013). Control strategies for high-power electric vehicles powered by hydrogen fuel cell, battery and supercapacitor. Expert Systems with Applications, 40(12): 4791-4804. https://doi.org/10.1016/j.eswa.2013.02.028
[35] Silva, M.A., de Melo, H.N., Trovao, J.P., Pereirinha, P.G., Jorge, H.M. (2013). An integrated fuzzy logic energy management for a dual-source electric vehicle. IECON 2013 - 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, pp. 4564-4569. https://doi.org/10.1109/IECON.2013.6699871
[36] Song, Z., Hofmann, H., Li, J., Hou, J., Han, X., Ouyang, M. (2014). Energy management strategies comparison for electric vehicles with hybrid energy storage system. Applied Energy, 134: 321-331. https://doi.org/10.1016/j.apenergy.2014.08.035
[37] Kraa, O., Ghodbane, H., Saadi, R., Ayad, M.Y., Becherif, M., Aboubou, A., Bahri, M. (2015). Energy management of fuel cell/supercapacitor hybrid source based on linear and sliding mode control. Energy Procedia, 74: 1258-1264. https://doi.org/10.1016/j.egypro.2015.07.770
[38] Dusmez, S., Khaligh, A. (2014). A supervisory power-splitting approach for a new ultracapacitor–battery vehicle deploying two propulsion machines. IEEE Transactions on Industrial Informatics, 10(3): 1960-1971. https://doi.org/10.1109/TII.2014.2299237
[39] Ortúzar, M., Moreno, J., Dixon, J. (2007). Ultracapacitor-based auxiliary energy system for an electric vehicle: Implementation and evaluation. IEEE Transactions on industrial electronics, 54(4): 2147-2156. https://doi.org/10.1109/TIE.2007.894713