© 2018 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
To solve the problems of traditional fingerprint acquisition method (e.g. image deformation, alignment difficulty and low resolution), this paper proposes a multi-view fingerprint image acquisition method and a matching recognition algorithm based on the fingerprint direction field. Focusing on the legitimacy probability of a single fingerprint match, the multi-view fingerprint acquisition method can effectively prevent the deformation of fingerprint images, and simultaneously acquire multiple fingerprint images. Meanwhile, the proposed matching recognition algorithm was contrasted with the traditional fingerprint recognition algorithm. The results show that the proposed algorithm outperformed the traditional one thanks to its ability to differentiate between legitimate and illegitimate matching scores, and its ability to acquire the specific direction field and texture near the details when the image has extremely few details or a low quality. Further comparison with other algorithms reveals that the proposed algorithm can accurately distinguish between matched and unmatched details, thereby enhancing the accuracy of fingerprint recognition and matching.
fingerprint recognition, fingerprint image, direction field, matching, multi-view
Because of its uniqueness and convenience in acquisition, fingerprint has become one of the most important ways for identification, and has been widely used in various social environments. With the continuous technological development, the fingerprint recognition technology has become more mature and robust. High-quality fingerprints can be well pre-processed and recognized; however, low-quality ones acquired are often hard to correctly recognize with the current technology. There are two major reasons for the poor acquisition quality of fingerprints: the finger is pressed and deformed during the acquisition process, and as a result, it is difficult to align the input fingerprint with the sample in the fingerprint database (Dass and Jain, 2007; Shi et al., 2018; Tripathy and Harish, 2018; Zhu et al., 2005; Zhang et al., 2007); the contact area between the finger and the sampler is too small, so the fingerprint minutiae acquired are not adequate, or the dirt on the finger reduces the quality of the image captured (Nguyen et al., 2013; Yang and Park, 2008; Qi et al., 2005; Wang and Niu, 2007).
In order to improve the quality of fingerprints acquired, researchers proposed a number of improved methods, including the matching of fingerprint feature points and minutiae (Tong et al., 2005; Feng, 2008; Cao et al., 2012; Que et al., 2001); matching based on fingerprint ridgeline or texture (Le and Van, 2012); fingerprint recognition methods based on non-linear fusion algorithms like BP neural network and support vector machine (SVM) (Chang and Fan, 2002; Zhang and Yan, 2004); and fingerprint recognition classification algorithms (Prk and Park, 2005; Liu et al., 2011; Cappelli et al., 2012).
In light of the problems like deformation of images, difficult alignment of fingerprints and low resolution of fingerprint images in the traditional fingerprint acquisition method, this paper proposes a multi-view fingerprint image acquisition method and a fingerprint direction field matching recognition algorithm to improve the above problems in the hope of providing useful references for the research on fingerprint recognition and matching.
2.1. Multi-view non-contact fingerprint recognition
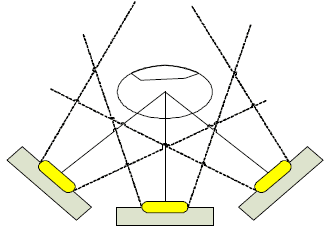
The principle for multi-view fingerprint image acquisition is shown in Figure 1, which shows the fingerprint is acquired from 3 views. The finger enters the system from above, and below it there are 3 cameras set at three angles to capture the images from three views.
Figure 1. System principle of multi-view fingerprint acquisition
The authentication template and the query sample in the acquisition system can be expressed as follows:
$\left\{ \begin{array} { l } { \left\langle T _ { i } , Q _ { i } \right\rangle 1 \leq i \leq N } \\ { T _ { i } = \left\langle t _ { i } ^ { l } , t _ { i } ^ { m } , t _ { i } ^ { r } \right\rangle } \\ { Q _ { i } = \left\langle q _ { i } ^ { l } , q _ { i } ^ { m } , q _ { i } ^ { r } \right\rangle } \end{array} \right.$ (1)
til and qil represent the features of the template and the input feature values of the query sample under different views in the i-th fingerprint image match. The same is for other elements. So the following equation holds:
$s=f\left( {{T}_{i}},{{Q}_{i}} \right)=f\left( \left\langle t_{i}^{l},t_{i}^{m},t_{i}^{r} \right\rangle ,\left\langle q_{i}^{l},q_{i}^{m},q_{i}^{r} \right\rangle \right)$ (2)
S is the feature matching score within [0,1]. The closer s is getting to 1, the higher probability there will be that the user inputting the fingerprint features is a legitimate user. The collection of the multi-view fingerprint feature matches proposed based on Equation (2) is as follows:
${{S}_{i}}=\left\{ s_{i}^{ll},s_{i}^{mm},s_{i}^{rr},s_{i}^{lm},s_{i}^{ml},s_{i}^{ml},s_{i}^{mr},s_{i}^{rm} \right\}$ (3)
sill stands for the matching score of the input fingerprint and the sample in the system under the first perspective in the i-th match in the system. sill can be expressed as follows:
$\begin{matrix} s_{i}^{ll}=f\left( t_{i}^{l},q_{i}^{l} \right) & 0\le \\\end{matrix}s_{i}^{ll}\le 1$ (4)
Accordingly, the expressions for the other 7 matching scores in Equation (3) can be obtained. Si can be obtained from the fusion result of Equation (3). So the multi-view fingerprint recognition problem can be converted to a fusion algorithm problem for matching score.
Based on the above theory, this paper proposes an improved multi-view non-contact clustering fingerprint recognition algorithm. This algorithm consists of four parts - image preprocessing, fingerprint feature extraction, feature parameter matching and image fusion. Fingerprint image preprocessing mainly includes image denoising, segmentation and edge detection to finally separate the fingerprint from the environment. Fingerprint feature extraction is to modify and segment the features of the fingerprint pattern based on the pre-processed result and enhance the image and extract the feature values; feature matching is to match the input fingerprint features based on non-linear algorithms like the neural-network-based algorithm.
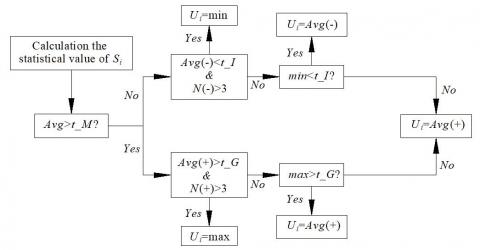
Figure 2. Flow chart of the proposed algorithm
This paper proposes the improved multi-view non-contact clustering fingerprint recognition algorithm by integrating and improving the above image processing technologies. The flow chart of this algorithm is shown in Figure 2. The matching scores in Equation (3) are divided into 2 categories - the results with a larger average are classified as a category and denoted as S{+1}; the reset with a smaller average are denoted as S{-1}. Let the number of elements in S{+1} and S{-1} be N(+) and N(-), respectively. When N(+)>N(-), there is a large probability that the input fingerprint is legitimate; otherwise, the probability for illegitimate fingerprint is high. It can be seen from Figure 2 that, after the matching set is classified, it needs to be determined whether the average matching score Avg>t_M holds and the matching score should be determined based on the size relationship of the N(+) and N(-), that is to say, the core function of the improved multi-view non-contact clustering fingerprint recognition algorithm proposed in this paper is to determine the probability of fingerprint legitimacy during a single match.
2.2. Test results and analysis
1000 fingers were selected and each finger was sampled from 3 views, so a total of 3000 fingerprint samples were collected. The fingerprint to be input was captured in 3 stages, and 3 times for each stage, at an stage interval of 10d. The multi-view fingerprint image recognition system matched the input fingerprints and the samples in the image library. The matching threshold was set at ρ. If the matching calculation result>ρ, the two fingerprints would be regarded as matched and the input fingerprint would be legitimate; otherwise, the two would be regarded as not matched. At the same time, the following indicators were given:
(1) False acceptance rate (FAR): probability that the system determines a fingerprint is legitimate when it is not the same as the sample fingerprint;
(2) False rejection rate (FRR): probability that the system determines a fingerprint is illegitimate when it is the same as the sample fingerprint;
(3) Equal error rate (EER): probability that FAR=FRR.
Area under the sensitivity curve AUC:
$AU{{C}_{R}}=\int{\left( 1-FRR\left( t \right) \right)dFAR\left( t \right)}$ (5)
Evaluation index for feature recognition of overall performance d_prime:
$d\_prime=\frac{\left| {{\mu }_{gen}}-{{\mu }_{imp}} \right|}{\sqrt{{\sigma _{gen}^{2}}/{2}\;+{\sigma _{imp}^{2}}/{2}\;}}$ (6)
μgen and μimp are the mean matching scores of legitimate users and illegitimate users, respectively; σ2gen and σ2imp are the variances of the matching scores of legitimate users and illegitimate users, respectively. From the above analysis, it can be seen that the smaller the EER is, the larger the AUC and d_prime will be and the better the recognition matching performance of the multi-view fingerprint image acquisition system will be.
The fingerprints from 3 perspectives (L, M and R) are matched in pairs and there are a total of 9 combinations. The EER, AUC and d_prime values of the 7 combinations are calculated, with the results shown in Table 1. It can be seen that, the recognition matching rate is low for the LR and RL combination, and thus they are not suitable as fusion classifiers. Therefore, LL, MM, RR, LM, ML, MR and RM combinations are used as the basic fusion classifiers.
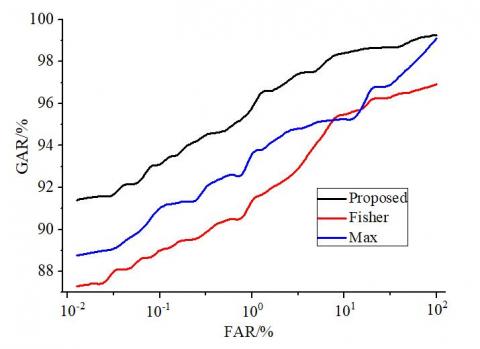
In order to verify the effectiveness of the proposed multi-view non-contact fingerprint recognition algorithm, this paper calculates the above indices of the proposed method and traditional fingerprint recognition methods (SVM, Fisher, Sum and Max) and obtains the values of various indices, as shown in Table 2, where Sum represents the average of all matching scores; and Max is the maximum value of all matching scores. Figure 3 shows the ROC curves of the proposed algorithm, Fisher algorithm and Max algorithm.
Judged from Table 2 and Figure 3, the SVM algorithm has the worst overall performance, followed by Fisher algorithm. Sum and max algorithms have relatively good fingerprint recognition performances, and the proposed method is the one with the highest recognition accuracy among the 5 fingerprint recognition methods.
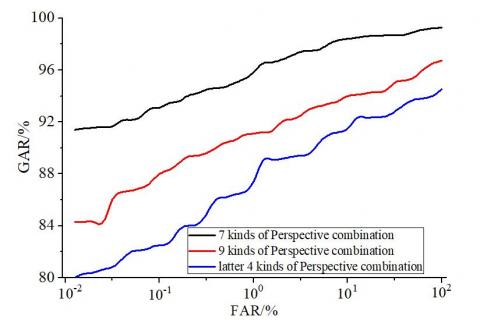
The combinations of different perspectives in Table 1 are matched to compare the fingerprint recognition performance. The different ROC curves are shown in Figure 4, which lists the fingerprint recognition fusion result of the first 7 combinations of perspectives in Table 1, all combinations and the last 4 combinations. From this figure, it can be seen that the fusion of the first 7 combinations has achieved the best fingerprint matching effect, followed by the matching effect of the 9 combinations, and that the matching effect of the last 4 combinations is the worst.
Table 1. Calculation indices of combinations from different perspective
|
Number |
Perspective combination |
EER/% |
d_prime |
AUC |
|
1 |
LL |
7.893 |
3.156 |
0.973 |
|
2 |
MM |
5.448 |
4.219 |
0.992 |
|
3 |
RR |
6.011 |
4.276 |
0.982 |
|
4 |
vLM |
19.492 |
1.584 |
0.861 |
|
5 |
ML |
23.381 |
1.903 |
0.876 |
|
6 |
MR |
16.216 |
2.342 |
0.927 |
|
7 |
RM |
12.189 |
2.529 |
0.913 |
|
8 |
LR |
43.285 |
0.602 |
0.606 |
|
9 |
RL |
42.589 |
0.597 |
0.628 |
Table 2. Comparison of calculation indices between the proposed method and other methods
|
Number |
Algorithm |
AUC |
EER |
d_prime |
|
1 |
SVM |
0.987 |
2.785 |
6.199 |
|
2 |
Fisher |
0.982 |
3.967 |
5.291 |
|
3 |
Max |
0.991 |
3.565 |
4.262 |
|
4 |
Sum |
0.989 |
2.608 |
4.993 |
|
5 |
Proposed method |
0.998 |
1.918 |
7.105 |
Figure 3. ROC curves of 3 multi-view fingerprint acquisition methods
Figure 4. Comparison of multi-view fingerprint acquisition methods with different combinations of perspectives
3.1. Direction field matching recognition algorithm
The common practice of fingerprint recognition is to match the minutiae and feature points of the input fingerprints and those in the fingerprint database. When the fingerprint image resolution is low, minutiae and feature points often include false values, and some feature information is lost, making it hard to achieve satisfactory fingerprint matching results. Therefore, an improved fingerprint image recognition matching algorithm is proposed to improve the above problem and increase the local matching recognition rate.
The following sampling point structure is defined: with a random minutia L in the fingerprint as the center of a circle, there are a number of sampling points evenly distributed around it, and then the interval of adjacent sampling points can be regarded as the periodic value of the fingerprint ridgeline. Let the direction of the minutia be α, and the direction field of the k-th sampling point around the minutia can be expressed as αl,k, and thus the relative direction between α and αl,k can be expressed as:
$\left\{ \begin{array} { l } { \beta _ { l , k } = \lambda \left( \alpha - \alpha _ { l , k } \right) } \\ { \lambda ( \theta ) = \left\{ \begin{array} { l l } { \theta - \pi } & { ( \theta \geq \pi / 2 ) } \\ { \theta + \pi } & { ( \theta < - \pi / 2 ) } \\ { \theta } & { \text { others } } \end{array} \right.} \end{array} \right.$ (7)
According to Equation 1, it can be seen that the local direction field of each minutia can be expressed with βl,k of the sampling points in its neighborhood, i.e.:
$\begin{matrix} {{D}_{o}}\left( p \right)=\left\{ {{\beta }_{l,k}} \right\} & \left( k=0,1,...,{{K}_{l}}-1;l=0,1,...,L-1 \right) \\\end{matrix}$ (8)
When the number of sampling points in a minutia area is less than 1/5 of the total sampling points, it is considered that the sampling points around the minutia can provide too little direction field feature information. So the calculation is terminated and the sampling points are re-selected.
Set the translation parameter (Δx, Δy) and the rotation parameter (Δθ). If the two parameters can make the input fingerprint image and that in the fingerprint image database fully match with each other, then the local direction fields of the two are considered aligned. Let a minutia in the input fingerprint image be Qp, and the corresponding minutia in the fingerprint image in the database be Tq. Record the direction field of each sampling point around Qp and Tq and the relative direction value sets of the minutiae. Then the direction value difference Δij between the location of each sampling point can be expressed as:
${{\Delta }_{ij}}=\beta _{i,j}^{Q}-\beta _{i,j}^{T}$ (9)
When there are large differences between two images, Qp and Tq need to be staggered for alignment, and at the same time, the Qp direction value should be adjusted by an angle of θ1. So the difference value can be expressed as:
${{\Delta }_{ij}}=\beta _{i,(j+1)\bmod 10}^{Q}-\beta _{i,j}^{T}-{{\theta }_{1}}$ (10)
According to Equation (7)-(9), it can be considered that, when the rotation angle is θ1, the two images have the best match. Calculate the similarity of Qp and Tq according to Equation (10):
${{S}_{o}}\left( {{Q}_{p}},{{T}_{q}} \right)=mean\left( {{s}_{o}}\left( {{p}_{l,k}},{{q}_{l,k}} \right) \right)$ (11)
3.2. Analysis of test results
In order to verify the effectiveness of the proposed fingerprint image direction field matching algorithm, this paper designs a verification test. The test data were selected from the 2014 International Fingerprint Database, which include fingerprints of 500 fingers in total, with 8 images for each finger.
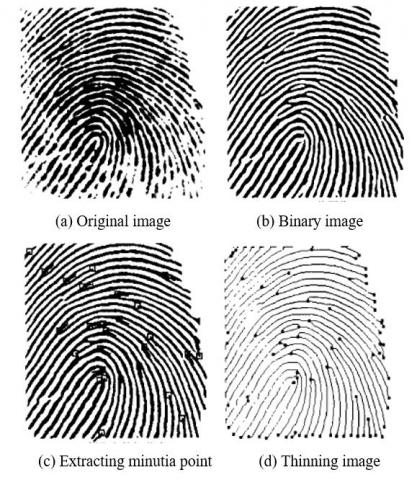
Figure 5. Principle of multi-view fingerprint acquisition system
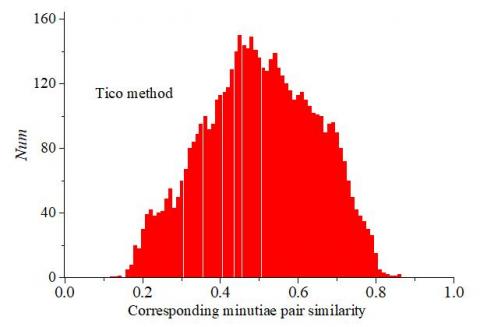
(a) Tico method
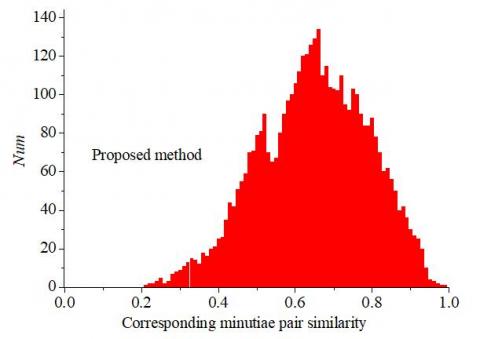
(b) Proposed method
Figure 6. Distribution of similarity values of non-corresponding minutiae pairs using different methods
Images affected by nonlinear deformations were chosen for processing and analysis. One of the original images input is shown in Figure 5(a), denoted as Q, and the corresponding input image is recorded as T. Figure 5(b) is the pre-processed binary image. Figure 5(c) and Figure 5(d) are the refined images after the extraction of the direction field. As can be seen from the figure, due to the impacts of nonlinear deformation, there are great differences in local parts of the image.
Figure 6 lists the similarity distributions under the proposed algorithm and the traditional classical algorithm (Tico algorithm) when there is no match in the neighborhood of minutiae. It can be seen that, compared with that under the Tico algorithm, most similarities of all minutiae under the proposed algorithm are distributed within the range of 0.6-0.8, and the main part of the minutiae is more concentrated. Therefore, the method proposed in this paper can better distinguish between matched and unmatched minutiae and thus more accurately recognize and match local direction fields of the minutiae and finally realize the correct matching of fingerprint images.
This paper compares the equal error rate (EER) of the proposed method, the Tico algorithm, the traditional support vector machine (SVM) algorithm and the BP neural network method in fingerprint matching, as shown in Table 3. It can be seen that the method proposed in this paper is better than the other three methods and better improves the fingerprint recognition matching function.
Table 3. Equal error rates of 4 fingerprint matching algorithms
|
|
SVM |
BPNN |
Tico method |
Proposed method |
|
EER/% |
3.015 |
3.528 |
2.649 |
1.547 |
In light of the problems like deformation of images, difficult alignment of fingerprints and low resolution of fingerprint images in the traditional fingerprint acquisition method, this paper proposes a multi-view fingerprint image acquisition method and a fingerprint direction field matching recognition algorithm to improve the above problems. The conclusions of this paper are as follows:
(1) The multi-view fingerprint acquisition method can effectively prevent fingerprint images from deforming and acquire multiple fingerprint images at the same time, which is more helpful to fingerprint recognition and that its core function is to determine the legitimacy probability of a single fingerprint match. Through the comparison between the proposed algorithm and the traditional fingerprint recognition algorithm, it is found that, with the ability to distinguishes between the legitimacy and illegitimacy of matching scores, the proposed algorithm can achieve better fingerprint recognition results.
(2) The fingerprint direction field matching recognition algorithm proposed in this paper can acquire information about the direction field and texture in the neighborhood of a minutia when there are very few minutiae in the fingerprint image and the quality of that image is low, so that it can distinguish and recognize effective minutiae. Through comparison with other algorithms, it is found that the fingerprint direction field based matching recognition algorithm can more accurately distinguish between matched and unmatched minutiae, and in this way the fingerprint recognition and matching function is improved
This work is supported by the National Natural Science Foundation of China (No. 61473108), the Public Projects of Zhejiang Province (No. 2013C33082), Zhejiang Provincial Natural Science Foundation (No. LY15F020038 and No. LQ13F020005) and the research foundation of the Education Department of Zhejiang Province (No. Y201430884).
Cao K., Yang X., Chen X., Tao X., Zang Y., Liang J. (2012). Minutia handedness: a novel global feature for minutiae-based fingerprint matching. Pattern Recognition Letters, Vol. 33, No. 10, pp. 1411-1421. https://doi.org/10.1016/j.patrec.2012.03.007
Cappelli R., Ferrara M., Maltoni D. (2012) Minutiae-Based Fingerprint Matching. In: Cross Disciplinary Biometric Systems. Intelligent Systems Reference Library, Vol. 37. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-28457-1_7
Chang J. H., Fan K. C. (2002). A new model for fingerprint classification by ridge distribution sequences. Pattern Recognition, Vol. 35, No. 6, pp. 1209-1223. https://doi.org/10.1016/s0031-3203(01)00121-2
Dass S. C., Jain A. K. (2007). Fingerprint-based recognition. Technometrics, Vol. 81, No. 3, pp. 175-187. https://doi.org/10.1111/insr.12017
Feng J. (2008). Combining minutiae descriptors for fingerprint matching. Pattern Recognition, Vol. 41, No. 1, pp. 342-352. https://doi.org/10.1016/j.patcog.2007.04.016
Le T. H., Van H. T. (2012). Fingerprint reference point detection for image retrieval based on symmetry and variation. Pattern Recognition, Vol. 45, No. 9, pp. 3360-3372. https://doi.org/10.1016/j.patcog.2012.02.017
Liu F., Zhao Q., Zhang D. (2011). A novel hierarchical fingerprint matching approach. Pattern Recognition, Vol. 44, No. 8, pp. 1604-1613. https://doi.org/10.1016/j.patcog.2011.02.010
Nguyen T. H., Wang Y., Li R., Nguyen T. H., Wang Y., Li, R. (2013). An improved ridge features extraction algorithm for distorted fingerprints matching. Journal of Information Security & Applications, Vol. 18, No. 4, pp. 206-214. https://doi.org/10.1016/j.jisa.2013.11.001
Park C. H., Park H. (2005). Fingerprint classification using fast fourier transform and nonlinear discriminant analysis. Pattern Recognition, Vol. 38, No. 4, pp. 495-503. https://doi.org/10.1016/j.patcog.2004.08.013
Qi J., Shi Z., Zhao X., Wang, Y. (2005). A robust fingerprint matching method. Pattern Recognition, Vol. 38, No. 10, pp. 1665-1671. https://doi.org/10.1016/j.patcog.2005.03.002
Que C., Tan K. B., Sagar V. K. (2001). Pseudo-outer product based fuzzy neural network fingerprint verification system. Neural Networks, Vol. 14, No. 3, pp. 305-323. https://doi.org/10.1016/s0893-6080(00)00091-5
Shi Y., Xiao X. J., Lu F. Q., Yang X. F. (2018). Fingerprint positioning based on piecewise filtering of received signal strength indices and space-scene constraints. Review of Computer Engineering Studies, Vol. 5, No. 2, pp. 40-44. https://doi.org/10.18280/rces.050203
Tong X., Huang J., Tang X., Shi D. (2005). Fingerprint minutiae matching using the adjacent feature vector. Pattern Recognition Letters, Vol. 26, No. 9, pp. 1337-1345. https://doi.org/10.1016/j.patrec.2004.11.012
Tripathy D. P., Harish Y. N. (2018). Prevention of illegal transportation using ANPR and biometric fingerprint in mining industry. Mathematical Modelling of Engineering Problems,Vol. 5, No. 3, pp. 249-255. https://doi.org/10.18280/mmep.050318
Wang X., Li J., Niu Y. (2007). Fingerprint matching using orientationcodes and polylines. Pattern Recognition, Vol. 40, No. 11, pp. 3164-3177. https://doi.org/10.1016/j.patcog.2007.02.020
Yang J. C., Park D. S. (2008). A fingerprint verification algorithm using tessellated invariant moment features. Neurocomputing, Vol. 71, No. 10-12, pp. 1939-1946. https://doi.org/10.1016/j.neucom.2007.12.034
Zhang Q., Yan H. (2004). Fingerprint classification based on extraction and analysis of singularities and pseudo ridges. Pattern Recognition, Vol. 37, No. 11, pp. 2233-2243. https://doi.org/10.1016/j.patcog.2003.12.020
Zhang Y., Yang X., Su Q., Tian J. (2007). Fingerprint recognition based on combined features. Lecture Notes in Computer Science, Vol. 4642, pp. 281-289. https://doi.org/10.1007/978-3-540-74549-5_30
Zhu E., Yin J., Zhang G. (2005). Fingerprint matching based on global alignment of multiple reference minutiae. Pattern Recognition, Vol. 38, No. 10, pp. 1685-1694. https://doi.org/10.1016/j.patcog.2005.02.016