Seda Arslan Tuncer | Ahmet Alkan*
© 2019 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Abdominal computed tomography (CT) data are often used in the diagnosis and treatment of patients. Segmentation of viscera on abdominal imaging facilitates diagnosis and focus upon the areas of interest. Kidney segmentation by abdominal imaging is complicated by the proximity of various organs and the similarities between abdominal tissues. Here we propose two fully automated approaches to kidney segmentation and discuss their performance. A fully automated approach was preferred to accelerate the decision-making process of the physician to eliminate the disadvantage of manual and semi-automatic segmentations. Each of the proposed methods essentially consist of three stages. Since the spine was used as reference in the study, the images were first treated to define the coordinates of the spine. Second, kidney fields were obtained using the Connected Component Labeling (CCL) and the K-means clustering algorithms. Last, the kidneys were segmented by applying different filters according to the method. A manual segmentation was then performed by specialist physicians. The performance of the tested algorithms was made by comparison to the manual segmentation results, using the Dice Similarity Coefficient, the Figures of Merit and Jaccard Similarity Index. Based on our analyses, acceptable success rates were achieved by the proposed methodologies. These automated systems are expected to be helpful during clinical diagnosis, medical training and future studies on kidney cancer diagnosis.
biomedical imaging, clustering algorithms, image processing, image segmentation
Imaging for diagnostic purposes has increased in importance because it offers finely detailed anatomic information. Imaging data can be managed with greater ease by delimiting the tissue images in fields of interest. The use of new techniques for image analysis has been increasing along with numerical data display and management. Segmentation and imaging are two narrowly related fields of interest and are used in many radiological applications. Making these techniques convenient and easy is as important as the development of other innovative techniques both for segmentation and three-dimensional imaging. Early diagnosis of diseases can reduce the adverse effects and costs of treatment as well as the resources allocated to such treatment. This has led to an increase in patient survival.
Physicians sometimes fail to establish a satisfactory diagnosis for many reasons including poor resolution imaging data. Therefore, such images have to be analyzed to increase the data content. Segmentation of multiphase, contrast-enhanced CT scans is an efficient method to identify and characterize renal lesions. Kidney images are acquired before the patient holds his or her breath and injection of contrast medium. The abdominal area is repeatedly scanned during the distribution of the contrast. Lesion identification uses differential images acquired during this process.
Segmentation describes separation of any image or part thereof from the remaining parts [1]. Segmentation of images is frequently used in medicine to analyze anatomic structures, to plan treatment or for computer-assisted surgery [2]. This is often difficult in the kidney due to different contrast in the inner regions and image protocols and grayscale levels designed for the kidney. While there are semi-automated protocols, user-interactive methods are preferred despite the high time cost. The specialist therefore always prefers automated segmentation.
In this paper, to get the automatic segmentation we have employed the usage of the anatomical structure of the abdominal CT image. Following a spinal segmentation, the spine coordinates were selected to separate the kidneys. Two different approaches namely CCL and K-means based kidney segmentation were proposed. The success of each was assessed by various evaluation criteria. Part 2 of this article reviews published studies. Part 3 explains the proposed methods in detail and presents the experimental results. In Part 4, each approach is separately assessed for performance using the same evaluation criteria. The results between the two methods are compared. The last section discusses the results.
Kidney segmentation is difficult because the shape and size of the kidney are variable and the contrast of the actual kidney borders is weak. New techniques have been developed to overcome these difficulties [3]. The techniques known in the literature for kidney segmentation are Edge or boundary based [3], Region based [4], Texture based [5], Active contour [6], and model based methods [7]. These studies focus principally on renal segmentation starting from abdominal images. Tuncer et al., used a decision support system for renal cancer detection by performing kidney segmentation [8]. With the SVM based decision support system, the classification success was calculated as 89.3% according to the Dice coefficient. Rudra et al. performed graph cut and pixel-connectivity based kidney segmentation in low contrast abdominal MRI data [9]. Performance evaluation was performed according to Dice coefficient and 98% success was achieved. Cuingnet et al. suggested random forests and template deformation-based segmentation for use in routine clinical applications. Segmentation has been accomplished for as short a time as a few seconds for each of the CT images. Dice coefficient was observed greater than 90% [10].
Sharma et al proposed a deep learning-based segmentation process to monitor kidney development for Autosomal Dominant Polycystic Kidney Disease (ADPKD) disease. According to the method applied to CT images, the Dice coefficient was calculated as 86% [11]. Tsagaan et al. proposed an approach based on a deformable model for the segmentation of medical images in three-dimensional (3D) anatomic volumes [12]. In another study, Tsagaan et al. used statistical data from renal image gray scale values to make a deformable model. Here, 33 abdominal CT images were used. A correspondence ratio of approximately 86.9% between automated and manual segmentation was obtained [13].
Lin et al. developed a computer-supported segmentation system to identify kidney tumours on CT images. The CT images were digitized, and the grayscale thresholding was used for kidney segmentation. Based on tissue analysis performed on kidney tumour sample images, the kidney tumours were used as an algorithm seed point. The means and standard deviation measures were used to identify kidney tumours. The computerized perception system showed 85% sensitivity in identifying kidney tumours [14]. Song et. al proposed the based Fuzzy C-means algorithm with spatial information algorithm and GrowCut algorithm segmentation process [15]. They reported a sensitivity of 95.46% with specificity of 99.82%. Gao Yan characterized the kidney localization with density-based CCL. A method based on region growing was used for kidney segmentation. This method first used an adaptive threshold. Later, CCL was introduced and an estimated starting point obtained for kidney segmentation. Using these starting points, segmentation was performed with the region-growing algorithm [16].
A novel automatic segmentation method was proposed using tissue data-based properties. This approach consists of two steps: finding a set of tissue features via Gabor filters, and performing an imaging segmentation based on the expectation-maximization (EM) algorithm. The system was trained on an Adaboost classifier. The kappa factor assessed system success. It amounted to 0.57 [17]. Natarajan et al. aimed for semi-automatic kidney segmentation on mid-level image processing operations [18]. Akyar et al. presented an automatic segmentation of the kidney followed by registration of segmented kidneys in different phases. The automated kidney segmentation was performed using morphologic operators relative to the calculated position of the spine [19]. Nithya et al. used an artificial neural network and multi-core k-mean clustering algorithms to develop an effective kidney disease detection approach [20]. In the study, the proposed linear + quadratic kernel approach was compared with other methods and maximum accuracy was obtained. Selvathi et al. proposed a novel ultrasound kidney image segmentation. Selvathi et al. proposed a new ultrasound kidney image segmentation [21]. The proposed method is based on Modified Distance Regularized level set and local featured are obtained using Cauchy functions.
So many classification and clustering methods are applied for kidney segmentation in previous studies, but the spine has not been used as reference point for the automatic extraction/segmentation of the kidneys in abdominal images. By selecting the spine as a reference point, abdominal region divided into two pieces and the proposed algorithms are applied on these parts. This application is the one of the most important procedural novelty of this study that increases the kidney segmentation accuracy.
Data were obtained from 30 patients in the Firat University Medical Faculty Radio Diagnostics Department archive system. The area of interest was not present; no images were processed. The material consisted of 5-mm-thick CT images were acquired in DICOM format. The obtained kidney CT images were segmented manually by a radiologist to produce ground truth images. The image matrices were colour matrices 512x512 in size. Since abdominal CT scans have many slices, we selected the slices that display the full range of the kidneys clearly, according to the advice of medical experts.
3.1 Material
Data were obtained from 30 patients in the Firat University Medical Faculty Radio Diagnostics Department archive system. The area of interest was not present; no images were processed. The material consisted of 5-mm-thick CT images were acquired in DICOM format. The obtained kidney CT images were segmented manually by a radiologist to produce ground truth images. The image matrices were colour matrices 512x512 in size. Since abdominal CT scans have many slices, we selected the slices that display the full range of the kidneys clearly, according to the advice of medical experts.
3.2 Methods
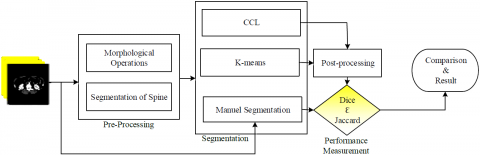
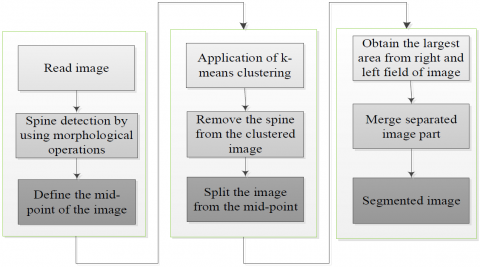
Two different methods were preferred because of they are widely used in gray level CT images and their less time cost to perform automatic kidney segmentation (Fig. 1). Each method consisted of three steps including characterization of the spine in pre-processing, the application of the CCL and K-means algorithms for segmentation and the performance measurement in post-processing. Figure 1 illustrates a flowchart for the proposed kidney segmentation system.
Morphology is the branch of biology that studies the shape and structure of living organisms. Mathematical morphology is a tool based on clustering operations. It is necessary to define and subtract image limits or skeleton-like structures and operations such as noise reduction and segmentation. Such applications are generally used as either preliminary or final operations in image processing including morphologic filtering, refining or pruning [22]. Morphological operations were performed on the images at the preliminary stage to ensure the success of the subsequent kidney segmentation by spinal characterization. The application of filters to the images provided differentiation of closely connected intrarenal cortical and medullary areas and the clear delineation of the spine.
Figure 1. The proposed automatic kidney segmentation system
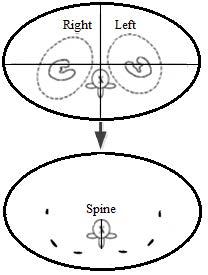
Several methods have been used to characterize the spine within abdominal images [23, 24]. One of these is the definition of the spine via calculation as described by Lin et al [14]. In this approach, the position of the spine is found in the transverse plane by multiplying the coronal maximum diameter of the abdominal region frame by 0.5 and the maximum sagittal diameter by 0.56 (see Figure 2). In this study, the columnar totals were calculated after determining the spine position by morphologic criteria. The column with the highest total value was accepted as the midpoint of the spine, and the image was separated into two halves at that point.
Figure 2. Determination of the point of separation for dividing the image into two sides
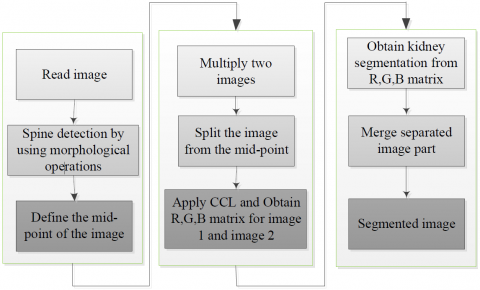
The second step in kidney segmentation was the application of the CCL and K-Means algorithms. CCL is an algorithm that labels objects adjacent or confused together on the image. It groups neighbouring pixels to allow distinguish objects. At the end of the clustering operation, each group on the image is numbered to represent one object. This allows various operations by separating objects according to their group number. The CCL algorithm may be 4-connectivity or 8-connectivity form. The latter of these are generally preferred. These include northeast and northwest pixels [25-27]. A flow chart for segmentation using the CCL algorithm is shown in Figure 3.
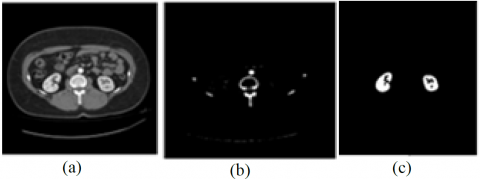
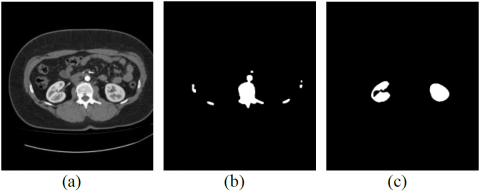
R, G and B values are obtained for each distinct part at the end of the CCL algorithm. Segmented kidney images are obtained by taking advantage of the fact that the kidney is the largest component in the separated parts. An image in the original 512 x 512 size is obtained by reconstructing starting from the division mid-point obtained in the first step. Figure 4 shows a) the original image, b) the segmented spine and spinal cord c) the final segmented kidneys by using CCL algorithm in its original dimensions.
Figure 3. Segmentation steps with CCL
Figure 4. a) Original image b) Segmented spine and spinal cord c) Final segmented kidneys with CCL
The second segmentation method is the K-Means algorithm, which is a multivariate statistical technique. It classifies the used CT images taking into consideration to their similarities and separates them into groups. K-Means is a widely used clustering technique with a non-hierarchical structure [27-29]. The K-Means algorithm may divide and classify over a number C of clusters a number of d variables and a number N of attributed vectors [28]. Operations with this method start by defining the centers of previously identified C clusters. Each variable is allocated to the nearest cluster center using a similarity index. After allocating each variable to a cluster in the initial dataset, the cluster center for each cluster is recalculated. Depending on the new location of these cluster centers, variables may be reassigned to different clusters. The operation is repeated until no changes occur in cluster membership [28].
Figure 5 shows the segmentation steps via the K-Means algorithm while Figure 6 shows step-by-step image segmentation.
Figure 5. Segmentation steps with K-means
Figure 6. a) Original image b) Segmented spine and spinal cord c) Final segmented kidneys with K-means
The criteria used to confirm the accuracy of the segmentation operation were the Dice similarity coefficient, the figure of merit and Jaccard similarity index [30-32]. Dice coefficients, ɛ and Jaccard index are used as the indicators of the success rate. These parameters were determined on CT scans of the right and left kidney as obtained in 30 patients. These accuracy measure parameters are summarized below.
4.1 Dice similarity coefficient
After fully automatic kidney segmentation, obtained results are compared with the ground truth to get the segmentation accuracy of the proposed methodology. For this aim, Dice similarity index is employed. Both segmented areas are represented in pixels. Dice similarity coefficient values vary from 0 to 1. As the similarity increases, this value approaches 1 [8, 30, 31]. Dice coefficient value is calculated by using the expression given in Eq. (1).
Dice Similarity Index $=2 * \frac{A S \cap M S}{A S+M S}$ (1)
In this equation, AS shows a binary mask of automatically segmented area, and MS shows a binary mask of the manually segmented area by the expert.
4.2 Figure of merit
Another parameter used to characterize the success of algorithms is the figure of merit. This is a parameter dependent on the differences between the automatic and manual segmentation of pixel areas. In Eq. (2), the manual and automated segmentation areas are shown with their respective values expressed in pixels as Vmanual and Vautomatic.
$\varepsilon=1-\frac{V_{\text {manual }}-V_{\text {automatic}}}{V_{\text {manual}}}$ (2)
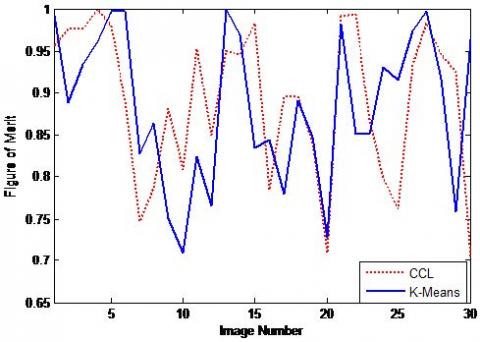
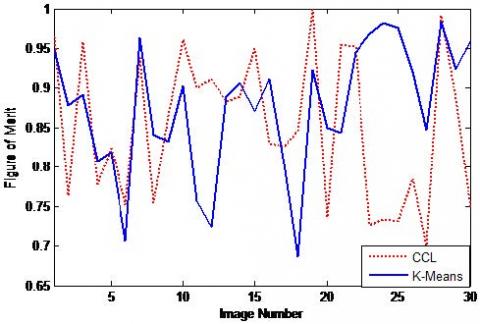
Figure 9 and Figure 10 show the Figure of Merit differences of segmentation results obtained by CCL and K-Means algorithms for the right and the left kidney, respectively.
4.3 Jaccard similarity index
To measure the statistical similarity between two images Jaccard similarity index can be used. In this study, this index is used to calculate similarity between the manually segmented and automatic segmented pixel areas on the CT images. Index value is calculated by using the Eq. (3).
Jaccard Index $=\frac{A S \cap M S}{A S+M S-(A S \cap M S)}$ (3)
where, AS and MS denotes segmented areas automatically and manually [30].
Since the malignant tumours of the kidney do not give any symptoms until the advanced stages of the disease, detection of the kidney tumours in the early stages is very important. By the accurate segmentation of kidneys from abdominal image, it is aimed to focus on the kidney in the abdominal image to improve the success rate prognosticate. For this goal, performance of the work has confirmed by using three evaluation criteria.
The first assessment is done by comparing the segmented areas those are obtained by manual and proposed method by using Dice coefficient. Figure 7 and Figure 8 show the Dice coefficient values of the related images in segmentation obtained by the CCL and K-Means algorithms for the right and left kidney, respectively.
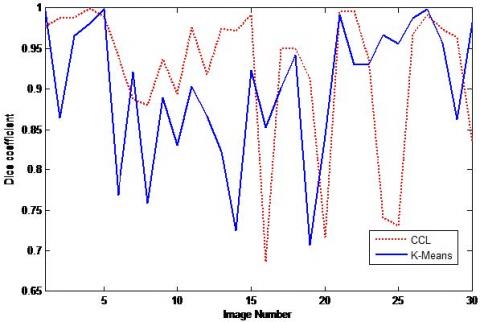
Figure 7. Dice coefficients for the right kidney for both algorithms
The horizontal axis shows the image number and the vertical axis shows the Dice coefficient value of the related image in Figure 7. Since, different success values obtained for the right and left kidney because of the difference in the images of the abdomituinal organs and kidneys, the Dice coefficient performance values are illustrated in the figure separately for the left and right kidneys. If Figure 7 is examined, one can see that, the acceptable Dice coefficient values are obtained with the CCL and K-Means algorithms that changes between 0.7 and 0.99 for the right kidney. The average Dice coefficient values 0.82 and 0.90 are calculated by using the CCL and K-Means algorithms, respectively.
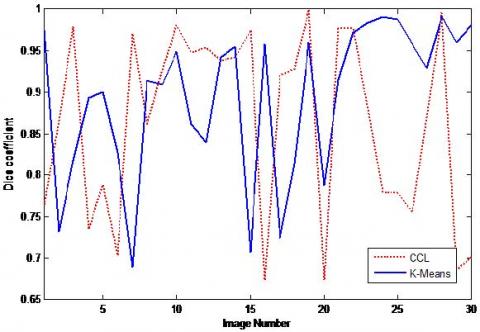
Figure 8. Dice coefficients for the left kidney for both algorithms
Obtained Dice coefficient results for the left kidney by using CCL and K-means algorithms are given in Figure 8. The average Dice coefficient values 0.64 and 0.94 are calculated by using the CCL and K-Means algorithms respectively. Although there are some images that show similar segmentation success with the both algorithm, K-means algorithm is more to successful on the left kidney due to the anatomical features of it. The Dice coefficients get values between 0 and 1. If it has a value greater than 0.7, it can be considered as an excellent segmentation accuracy [31].
Figure 9. The ε values for the right kidney for both algorithms
The results of the other performance evaluation criteria, namely figure of merit (ɛ) is given in Figure 9. For the right kidney segmentation accuracy, while CCL algorithm gives an average ɛ as 0.78, K-means algorithm gives an average value of ɛ as 0.97. These values are similar to the Dice coefficient values calculated for the right kidney in Figure 7. Due to the accuracy evaluation values by using both criteria are similar, it can be concluded that the applied methodology is successful in this topic.
If the Figure 10 is examined, one can see that ɛ values show similarity as in the Dice coefficient values in the left kidney that gives the lower values compared to the right kidney. For the left kidney segmentation, the average ɛ values 0.84 and 0.95 are calculated by using the CCL and K-Means algorithms, respectively.
Figure 9 and Figure 10 show that both segmentation algorithms give acceptable figure of merit values implying good segmentation.
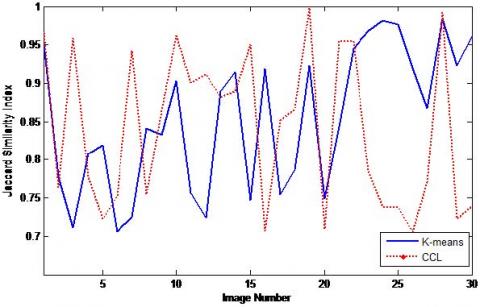
Right kidney segmentation accuracies obtained by using the Jaccard similarity index is summarized in Figure 11. The achievements of the average Jaccard similarity index values are calculated for the techniques CCL and K-means as 0.87 and 0.90, respectively.
Figure 10. The ε values for the left kidney for both algorithms
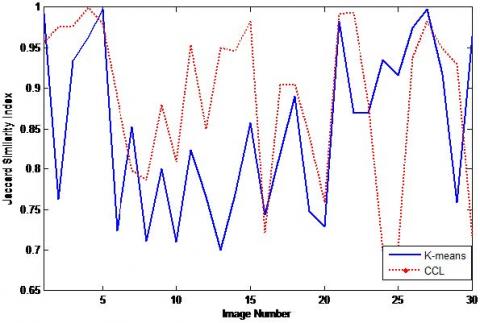
Figure 11. The Jaccard similarity index values for the left kidney for both algorithms
Similar results are calculated for the left kidney segmentation by using the Jaccard similarity index and they are summarized in Figure 12. The achievements of the average Jaccard similarity index values for the left kidney segmentation are calculated as 0.75 and 0.89 for the techniques CCL and K-means, respectively.
Figure 12. The Jaccard similarity index values for the right kidney for both algorithms
To compare the segmentation accuracy results, average performance evaluation values are calculated and given in Table 1. If this table is examined, one can see that, for the all the used performance evaluation techniques, the K-Means approach has higher performance index values than CCL for right and left kidney.
Table 1. Mean values of dice coefficient, Ɛ and Jaccard similarity index parameters for the right and left kidney segmentation via CCL and k-means algorithm
|
|
Right Kidney |
Left Kidney |
||
|
|
CCL |
K-Means |
CCL |
K-Means |
|
Dice |
0.822 |
0.905 |
0.641 |
0.941 |
|
Jaccard |
0.874 |
0.902 |
0.757 |
0.896 |
|
ɛ |
0.785 |
0.977 |
0.848 |
0.952 |
Kidney cancer in the early stages, the tumour may not cause significant complaints very young. Early diagnosis provides easier treatment, as well as increases the possibility of getting rid of the cancer completely. Generally, when the tumour has reached a very large size led to complaints and the tumour grows and expands treatment possibilities are reduced. Therefore, it is very important to realize the masses in the kidneys in the very early stages. For this purpose, clear segmentation of the kidney is the first and very important part of the kidney cancer analysis.
In this study we emphasized the accurate automatic kidney segmentation by using abdominal CT images. To do this, we proposed a novel approach that takes the spine as a reference point to extract the kidneys from the mixed abdominal organs. This methodological approach provides accurate automatic kidney segmentation and will be the initial/important step that can be used for the further studies in this area. The obtained accurate kidney segmentation results show that this methodology can be utilized in Kidney Cancer diagnosis in future studies. Multiple algorithms are applied to get automatic kidney segmentation and a full automatic kidney segmentation method is obtained. After the segmentation, segmentation accuracies of the applied techniques are calculated by using three post-processing techniques, namely Dice similarity coefficient, figure of merit and Jaccard similarity index.
CCL and K-Means algorithms were used to segment contrast-enhanced CT images of the kidney. The two methods were applied to the images independently of each other. The criteria used to confirm the accuracy of the segmentation operation were the Dice coefficient, figure of merit and Jaccard similarity index. A comparison of manual segmentation to those obtained by the proposed algorithms confirmed the success of the automated methods. After the performance evaluation, it can be concluded that, although both CCL and K-Means segmentation gives acceptable segmentation achievements, K-Means based segmentation methodology gives higher segmentation accuracy rates than CCL. The results indicated that the proposed automated segmentation procedure can be used to assist medical diagnosis and medical training. Deep learning-based techniques can be used in the analysis and diagnosis of kidney segmentation and renal-related diseases from abdominal CT images in future studies.
[1] Gonzales, R.C., Woods, R.E. (2001). Digital Image Processing. Prentice Hall.
[2] Torres, H.R., Queirós, S., Morais, P., Oliveira, B., Fonseca, J.C., Vilaça, J.L. (2018). Kidney segmentation in ultrasound, magnetic resonance and computed tomography images: A systematic review. Computer Methods and Programs in Biomedicine, 157: 49-67. https://doi.org/10.1016/j.cmpb.2018.01.014
[3] Ravishankar, H., Annangi, P., Washburn, M., Lanning, J. (2016). Automated kidney morphology measurements from ultrasound images using texture and edge analysis. Proceedings Volume 9790, Medical Imaging 2016: Ultrasonic Imaging and Tomography, San Diego, California, United States. https://doi.org/10.1117/12.2216802
[4] Rahman, T., Uddin, M.S. (2013). Speckle noise reduction and segmentation of kidney regions from ultrasound image. 2013 International Conference on Informatics, Electronics and Vision, ICIEV 2013, pp. 1-5. https://doi.org/10.1109/ICIEV.2013.6572601
[5] Mahmud, W.M.H.W., Izaham, R.M.A.R., Supriyanto, E. (2015). Boundary detection of kidney ultrasound image based on vector graphic approach ARPN. Journal of Engineering and Applied Sciences, 10(19): 8822-8829.
[6] Huang, J., Yang, C., Chen, Y., Tang, L. (2013). Ultrasound kidney segmentation with a global prior shape. Journal of Visual Communication and Image Representation, 24(7): 937-943. https://doi.org/10.1016/j.jvcir.2013.05.013
[7] Noll, M., Li, X., Wesarg, S. (2013). Automated kidney detection and segmentation in 3D ultrasound. Workshop on Clinical Image-Based Procedures CLIP 2013: Clinical Image-Based Procedures. Translational Research in Medical Imaging, pp. 83-90. https://doi.org/10.1007/978-3-319-05666-1_11
[8] Tuncer, S.A., Alkan, A. (2018). A decision support system for detection of the renal cell cancer in the kidney. Measurement, 123: 298-303. https://doi.org/10.1016/j.measurement.2018.04.002
[9] Rudra, A.K., Chowdhury, A.S. Elnakib, A., Khalifa F., Soliman, A., Beache, G., El-Baz, A. (2013). Kidney segmentation using graph cuts and pixel connectivity. Pattern Recognition Letters, 34(13): 1470-1475. https://doi.org/10.1016/j.patrec.2013.05.013
[10] Cuingnet, R., Prevost, R., Lesage, D., Cohen L.D., Mory, B., Ardon, R. (2012). Automatic detection and segmentation of kidneys in 3D CT images using random forests. Medical Image Computing and Computer-Assisted Intervention – MICCAI 2012: 15th International Conference, Nice, France, Proceedings, Part III, pp. 66-74. https://doi.org/10.1007/978-3-642-33454-2_9
[11] Sharma, K., Rupprecht, C., Caroli, A., Aparicio, M.C., Remuzzi, A., Baust, M., Navab, N. (2017). Automatic segmentation of kidneys using deep learning for total kidney volume quantification in autosomal dominant polycystic kidney disease. Scientific Reports, 7: 2049. https://doi.org/10.1038/s41598-017-01779-0
[12] Tsagaan, B., Shimizu, A., Kobatake, H., Miyakawa, K., Hanzawa, Y. (2001). Segmentation of kidney by using a deformable model. International Conference on Image Processing, Greece, 3: 1059-1062. https://doi.org/10.1109/ICIP.2001.958309
[13] Tsagaan, B., Shimizu, A., Kobatake, H., Miyakawa, K. (2002). An automated segmentation method of kidney using statistical information. Proc. Medical Image Computing and Computer Assisted Intervention, 2488: 556-563. https://doi.org/10.1007/3-540-45786-0_69
[14] Lin, D.T., Lei, C.C., Hung, S.W. (2006). Computer-aided kidney segmentation on abdominal CT images. IEEE Transactions on Information Technology in Biomedicine, 10(1): 59-65. https://doi.org/10.1109/TITB.2005.855561
[15] Song, H., Kang, W., Zhang, Q., Wang, S. (2015). Kidney segmentation in CT sequences using SKFCM and improved Grow Cut algorithm. BMC Systems Biology, 9(Suppl 5): S5. https://doi.org/10.1186/1752-0509-9-S5-S5
[16] Yan, G., Wang, B.L. (2010). An automatic kidney segmentation from abdominal CT images. IEEE International Conference on Intelligent Computing and Intelligent Systems, 1: 280-284. https://doi.org/10.1109/ICICISYS.2010.5658676
[17] Nedevschi, S., Ciurte, A., Mile, G. (2008). Kidney CT image segmentation using multi-feature EM algorithm based on Gabor filters. 4th International Conference on Intelligent Computer Communication and Processing, pp. 283-286. https://doi.org/10.1109/ICCP.2008.4648387
[18] Natarajan, P., Singh, B.P., Dwivedi, S., Nancy, S. (2013). Kidney segmentation in CT - scan image. International Journal of Scientific & Engineering Research, 4(6): 221-225.
[19] Akyar, H., Selver, M.A., Demir, K.G. (2008). Segmentation and registration of kidneys from contrast enhanced abdominal MR image. Signal Processing and Communications Applications, 330.
[20] Nithya, A., Appahurai, A., Venkadatri, N., Ramji, D.R., Palagan, C.A. (2020). Kidney disease detection and segmentation using artificial neural network and multi-kernel k-means clustering for ultrasound images. Measurement, 149: 106952. https://doi.org/10.1016/j.measurement.2019.106952
[21] Selvathi, D., Bama, S. (2017). Phase based distance regularized level set for the segmentation of ultrasound kidney images. Pattern Recognition Letters, 86: 9-17. https://doi.org/10.1016/j.patrec.2016.12.002
[22] Banik, S., Rangayyan, R.M., Boag, G.S. (2010). Automatic segmentation of the ribs, the vertebral column, and the spinal canal in pediatric computed tomographic images. J. Dig. Img., 23(3): 301-322. https://doi.org/10.1007/s10278-009-9176-x
[23] Lu, R., Marziliano, P., Hua Thng, C. (2005). Liver tumor volume estimation by semi-automatic segmentation method. In Proceedings of the IEEE Engineering in Medicine and Biology 27th Annual Conference, 3: 3296-9. https://doi.org/10.1109/IEMBS.2005.1617181
[24] Seo, K.S., Ludeman, L.C., Park, S.J., Park, J.A. (2004). Efficient liver segmentation based on the spine. Springer Lecture Notes in Computer Science, pp. 400-409. https://doi.org/10.1007/978-3-540-30198-1_41
[25] Li, M., Zheng, X.L., Wang, X.P., Lin, Y., Zhang, S.X., Tan, L.W. (2011). Segmentation of brain tissue based on connected component labeling and mathematic morphology. 4th International Conference on Biomedical Engineering and Informatics (BMEI), pp. 482-485. https://doi.org/10.1109/BMEI.2011.6098294
[26] He, L., Ren, X., Gao, Q., Zhao, X., Yao, B., Chao, Y. (2017). The connected-component labeling problem: A review of state-of-the-art algorithms. Pattern Recognition, 70: 25-43. https://doi.org/10.1016/j.patcog.2017.04.018
[27] Hossam, M.M., Hassanien, A.E., Shoman, M. (2010). 3D brain tumor segmentation scheme using K-mean clustering and connected component labeling algorithms. 10th International Conference on Intelligent Systems Design and Applications, pp. 320-324. https://doi.org/10.1109/ISDA.2010.5687244
[28] Dhanachandra, N., Manglem, K., Chanu, Y.J. (2015). Image segmentation using K-means clustering algorithm and subtractive clustering algorithm. Procedia Computer Science, 54: 764-771. https://doi.org/10.1016/j.procs.2015.06.090
[29] Han, C.Y. (2017). Improved SLIC imagine segmentation algorithm based on K-means. Cluster Computing, 20(2): 1017-1023. https://doi.org/10.1007/s10586-017-0792-9
[30] Thada, V., Jaglan, V. (2013). Comparison of Jaccard, dice, cosine similarity coefficient to find best fitness value for web retrieved documents using genetic algorithm. IJIET, 2(4): 202-205.
[31] Alkan, A., Tuncer, S.A., Gunay, M. (2014). Comparative MR image analysis for thyroid nodule detection and quantification. Measurement, 47: 861-868. https://doi.org/10.1016/j.measurement.2013.10.009
[32] Bertels, J., Eelbode, T., Berman, M., Vandermeulen, D., Maes, F., Bisschops, R., Blaschko, M. (2019). Optimizing the dice score and Jaccard index for medical image segmentation: Theory and practice. International Conference on Medical Image Computing and Computer-Assisted Intervention, pp. 92-100. https://doi.org/10.1007/978-3-030-32245-8_11