Badri Rekik![]() | Azzeddine Dekhane*
| Azzeddine Dekhane*![]() | Abdelhak Djellad
| Abdelhak Djellad![]() | Nacer Bouderres
| Nacer Bouderres![]() | Nadir Benamira
| Nadir Benamira![]() | Aya Soltana
| Aya Soltana![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This research addresses the critical role of control systems in wind turbine power management, focusing on three control methodologies: Proportional-Integral (PI), fuzzy logic, and sliding mode. These methods are applied to a dual-fed asynchronous generator (DFIG) in a horizontal-axis wind turbine with three blades. The study emphasizes the optimization and reliability of these control systems in enhancing the turbine's overall capacity and ensuring consistent energy output. A key finding is the effectiveness of the sliding mode control in reducing the static error and response time compared to PI and fuzzy logic controls, demonstrating its potential for improving wind turbine efficiency. This comparative analysis contributes to a deeper understanding of the most effective control mechanisms for wind turbines, offering valuable insights for future turbine design and implementation. The results of this study not only enrich the academic discussion but also have significant implications for the renewable energy industry.
wind turbine, DFIG, control, PI, fuzzy, sliding mode control
The global energy landscape is in the midst of a significant transformation, prompted by the growing recognition of the detrimental impacts of fossil fuels on the environment [1]. This has necessitated a shift towards more sustainable and eco-friendly energy sources [2], with wind energy emerging as one of the most promising and rapidly expanding sectors [3]. The Global Wind Energy Council reports that the capacity of wind power has experienced exponential growth over the past decade [4], highlighting its crucial role in the transition to a cleaner, greener energy future [5].
However, harnessing wind energy has its challenges [6]. The intermittent and unpredictable nature of wind necessitates developing and implementing advanced control systems to ensure the efficient and reliable operation of wind turbines [7]. These control mechanisms are integral to optimizing the conversion of wind energy into electrical power [8], managing the dynamic behavior of turbines [9], and ensuring compatibility with the electrical grid.
Over the years, a range of control strategies have been proposed and explored in this context [10-14]. Among them, Proportional-Integral (PI) control [15], fuzzy logic [16], and sliding mode control [17] have attracted considerable attention due to their potential to effectively address the unique challenges posed by wind energy systems [3]. While each method offers distinct advantages, there remains a notable gap in the literature concerning a comprehensive comparison clearly delineating their respective strengths and weaknesses in wind turbine control [18].
This article seeks to address this gap by conducting a thorough comparative analysis of these control methodologies, utilizing a doubly-fed asynchronous generator (DIFG) as our testbed. Our investigation is grounded in academic rigor and practical relevance to provide valuable insights that can inform future research endeavors and practical implementations in wind energy.
We chose the Proportional-Integral (PI) control, fuzzy logic, and sliding mode control strategies for our study due to their distinct advantages in wind turbine applications [19]. The PI controller, known for its simplicity and effectiveness in steady-state error reduction, is widely used in industrial applications, including wind turbine control [20]. On the other hand, fuzzy logic control offers a robust performance in the face of system uncertainties and nonlinearities, which are common in wind energy systems. Lastly, sliding mode control is selected for its high precision and ability to efficiently handle system disturbances and dynamic changes. This combination of methods allows for a comprehensive analysis that covers a broad range of scenarios encountered in wind turbine operation [21].
The DFIG is particularly favored in wind energy applications due to its unique characteristics [22]. These include its ability to operate over a wide range of wind speeds, its efficiency in energy conversion, and its flexibility in controlling both active and reactive power. Additionally, the DFIG's variable speed operation allows for a detailed examination of different control strategies under varying conditions, making it an ideal choice for assessing the effectiveness of PI, fuzzy logic, and sliding mode control methods in a dynamic and realistic wind energy scenario.
Furthermore, the article will delve into the intricacies of each control strategy, elucidating the theoretical underpinnings and practical applications. In doing so, we hope to shed light on the nuances that make each method suitable for specific aspects of wind turbine control while highlighting potential areas for improvement and further research.
The remainder of the paper is organized into several sections: Section 2 provides a detailed description of the doubly-fed asynchronous generator (DFIG), outlining its significance in industrial applications and various operating regimes, and delves into the active and reactive power control methods, discussing the classic Proportional-Integral (PI) regulator, the fuzzy regulator, and the sliding mode approach for controlling the wind system. Section 3 presents the simulation results, and compares the results obtained from PI, fuzzy, and sliding-mode controllers for DFIG control. Section 4's discussion evaluates each control mechanism's performance in terms of accuracy and response speed, while Section 5 concludes the paper, summarizing the essential findings and suggesting avenues for future research.
2.1 Doubly-fed asynchronous generator (DFIG)
The double-fed asynchronous machine is significant in industrial applications owing to its numerous advantages [23]. Among its benefits [24] is easy access to both the rotor and the stator, allowing for the measurement and control of currents. This provides excellent flexibility and precision for managing the flux and electromagnetic torque [25]. It offers several reconfiguration possibilities, making it applicable in various fields. It can operate at constant torque beyond the nominal speed with a slip (±30%) [26].
The double-fed induction machine (DFIM) exhibits diverse operating regimes, characterized by the slip, which denotes the speed difference between the rotor and the stator magnetic field. These regimes include stationary (g=1), sub-synchronous (0<g<1), synchronous (g=0), super-synchronous (g<0) [27]. Figure 1 depicts the mathematical model of the DFIG.
Figure 1. Used model of the DFIG
2.2 Methods presentation
2.2.1 Active and reactive power controls by the classic regulator (PI)
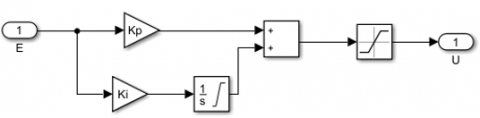
The temporal description of the traditional PI regulator consists of directly linking the control signal u(t) to the error signal e(t) [28]:
$u(t)=k_p\left(e(t)+\frac{1}{T_i} \int_0^n e(t) d t\right)$ (1)
Figure 2. Structure of a PI regulator in block diagram
The classic PI controller is characterized by its proportional and integral parameters (kp and ki), which determine its performance (Figure 2). An increase in kp speeds up the process response and reduces the static error (e) but can result in excessive oscillations.
Finding the optimal kp value is necessary for a fast and well-damped response. Integral action eliminates steady-state error. However, excessive ki (decrease in Ti ) increase leads to system instability.
These two parameters must be adjusted to optimize the system's response without introducing instability [29].
We can formulate the gains of the correctors using the machine parameters and the response time as follows [30]:
$k_p=\frac{1}{\tau_x} \frac{L_{s t}\left(L_{r t}-\frac{M^2}{L_{s t}}\right)}{M V_s} ; k_i=\frac{1}{\tau_r} \frac{R_{r t} L_{s t}}{M V_s}$ (2)
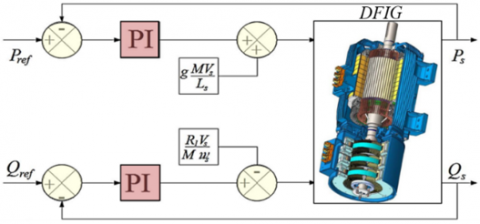
- The direct method [31] is as shown in Figure 3.
Figure 3. Block diagram of the direct control
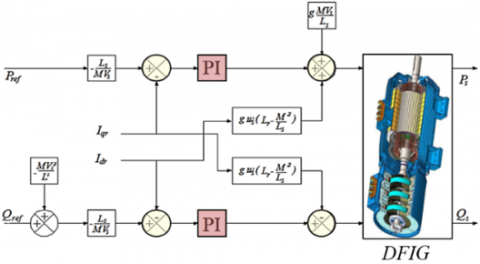
- The indirect method: Control without a power loop [32], which is as illustrated in Figure 4.
Figure 4. Block diagram of indirect control without power loop
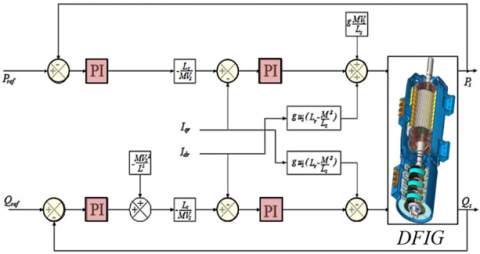
- The indirect method: Control with a power loop [31, 32]. which is as depicted in Figure 5.
Figure 5. Block diagram of indirect control with power loop
2.2.2 Active and reactive power controls by the fuzzy regulator
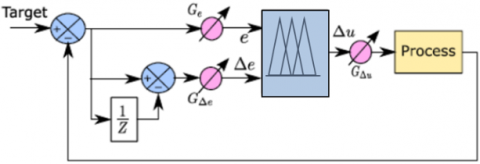
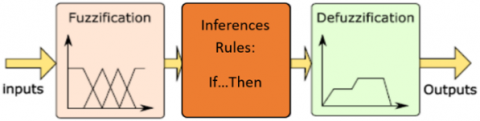
Originating from the work of Lotfi Zadeh in the 1960s at the University of Berkeley, fuzzy logic stands as a vital branch of artificial intelligence that manages the representation and processing of uncertain and imprecise knowledge through linguistic variables and fuzzy sets, making it adept at handling nonlinear and ambiguous processes [33]. As outlined in Figure 6 and 7, the design of a fuzzy regulator is intricate, demanding the delineation of regulatory strategies based on objectives and input-output observations while navigating challenges in selecting linguistic formalism and mathematical operators for undefined variables. Despite these complexities, fuzzy logic, by harnessing expert knowledge, can achieve remarkable results without requiring a detailed mathematical model of the system [34].
To further elucidate the application of fuzzy logic in DFIG control, it's crucial to delve into the specifics of its implementation. The selection of linguistic variables, rule bases, and defuzzification methods is based on the unique characteristics and requirements of DFIG systems. Linguistic variables are chosen to represent critical parameters of the DFIG accurately, while the rule base is tailored to capture the system's dynamic behavior under varying conditions. The defuzzification method is selected to balance response accuracy and computational efficiency. This detailed approach underlines the adaptability and precision of fuzzy logic in managing the complexities inherent in DFIG control.
Figure 6. Synoptic diagram of a fuzzy regulator
Figure 7. Block diagram for fuzzy control
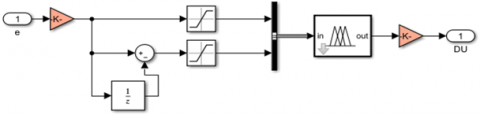
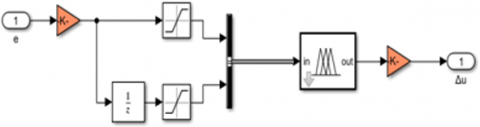
Courtesy of Figures 8, 9 and 10, we will integrate fuzzy controllers into the DFIG vector control block for direct and indirect methods, ensuring independent active and reactive power control.
- The direct method
Figure 8. Block diagram of the fuzzy regulator used in direct control
Figure 9. Description of fuzzy logic control in direct control of the DFIG
- The indirect command
Figure 10. Description of the fuzzy logic control in the indirect control of the DFIG
Table 1 shows the notations that characterize the linguistic values used for the "fuzzification" of inputs in direct control. Table 2 shows the inference matrix of the regulator used in direct control.
Table 1. The inference matrix
|
|
|
|
|
e |
|
|
|
Δu |
|
B.N. |
SN |
AZ |
SP |
BP |
|
|
B.N. |
B.N. |
B.N. |
SN |
SN |
AZ |
|
|
SN |
B.N. |
SN |
SN |
AZ |
SP |
|
Δe |
AZ |
B.N. |
SN |
AZ |
SP |
BP |
|
|
SP |
B.N. |
AZ |
SP |
SP |
BP |
|
|
BP |
AZ |
SP |
SP |
BP |
BP |
2.2.3 Control of the wind system using the sliding mode approach
According to a study by El-Alami et al. [17], sliding mode control is a technique that guides the state trajectory of a system towards a sliding surface, rendering the system robust against uncertainties and disturbances by creating a surface that facilitates tracking, management, and stability, and defining a control rule that attracts and sustains state trajectories on this surface, with the design involving the formulation of the sliding surface as a scalar function, typically based on the errors between the variables to be controlled [35].
$S(x)=\left(\lambda+\frac{d}{d t}\right)^{r-1} e(x)$ (3)
e(x) the difference between the reference and measured value, r the relative degree of the system, λ positive constant, its value is linked to the speed of convergence of the state trajectories.
Convergence conditions are pivotal in ensuring the system's dynamics converge towards the sliding surfaces and remain unaffected by external disturbances, a process fundamentally grounded in driving the sliding surface towards zero through a convergence dynamic, typically expressed in a specific form.
$\left\{\begin{array}{l}\dot{\mathrm{S}}(x)>0 \text { if } S(x)<0 \\ \dot{\mathrm{S}}(x)<0 \text { if } S(x)>0\end{array}\right.$ (4)
It can also be used to demonstrate the existence and stability of the system [17, 36]. The concept consists of selecting a positive scalar function V(x)>0 to ensure the attraction of the variable to be controlled towards its reference value.
Then, a U command is developed to reduce this function $\dot{V}$(x)<0. The Lyapunov function V(x) is used, defined as follows:
$V(x)=\frac{1}{2} \mathrm{~S}(\mathrm{x})^2$ (5)
It is possible to express the derivative in the following form:
$\dot{V}(x)=S(x) S(x)$ (6)
The SMC control law U(t) is composed of two main parts, $U_c(t)$ and $U_d(t)$. These two parts are determined as follows:
$U(t)=U_c(t)+U_d(t)$ (7)
$U_c(t)$: The continuous part of the controller. This part maintains the system's output on the sliding surface. $U_d(t)$: The discontinuous part of the SMC control law includes the nonlinear switching element of the control law and is characterized by its erratic nature on the sliding surface.
In this part, we will control the active and reactive power of the DFIG by replacing the PI regulator with a nonlinear regulator SMC of order 1 (r=1).
And reactive $Q_S$ power sliding surfaces $P_S$ are determined using the rotor current tracking errors $\left(I_{d r}, I_{q r}\right)$ respectively by El Alami et al. [17]:
$\left\{\begin{array}{l}S\left(I_{q r}\right)=e_{I_{q r}}=I_{q r}{ }^*-I_{q r} \\ S\left(I_{d r}\right)=e_{I_{d r}}=I_{d r}{ }^*-I_{d r}\end{array}\right.$ (8)
The derivative of our sliding surface:
$\left\{\begin{array}{l}\dot{S}\left(I_{q r}\right)=\dot{e}_{I_{q r}}={I^·}_{q r}{ }^*-{I^·}_{q r} \\ \dot{S}\left(I_{d r}\right)=\dot{e}_{I_{d r}}={I^·}_{d r}{ }^*-{I^·}_{d r}\end{array}\right.$ (9)
Lyapunov function will then be:
$\left\{\begin{array}{l}V\left(S_{I_{q r}}\right)=\frac{1}{2} S_{I_{q r}}{ }^2 \\ V\left(S_{I_{d r}}\right)=\frac{1}{2} S_{I_{d r}}{ }^2\end{array}\right.$ (10)
The derivative of the Lyapunov function:
$\left\{\begin{array}{l}\dot{V}\left(S_{I_{q r}}\right)=S_{I_{q r}} \dot{S}_{I_{q r}} \\ \dot{V}\left(S_{I_{d r}}\right)=S_{I_{d r}} \dot{S}_{I_{d r}}\end{array}\right.$ (11)
By substituting the expression for the derivative of the currents $\left(I_{q r}, I_{d r}\right)$ of the rotor voltage equations $\left(V_{q r}, V_{d r}\right)$, we obtain the following formulation [36]:
$\left\{\begin{array}{c}\dot{S}_{I_{q r}}=\dot{I}_{q r}{ }^*-\frac{1}{s i g L_{r t}}\left(V_{q r}-R_{r t} I_{q r}-sig L_{r t} \omega_r I_{d r}-\omega_r \frac{M V_s}{\omega_s L_{s t}}\right) \\ \dot{S}_{I_{d r}}=\dot{I}_{d r}{ }^*-\frac{1}{sigL_{rt}}\left(V_{d r}-R_{r t} I_{d r}-sigL_{rt} \omega_r I_{d r}\right)\end{array}\right.$ (12)
The control law consists of the combination of the equivalent switching control and the discontinuous regulation:
$\left\{\begin{array}{c}\dot{S}_{I q r}={I^·}_{q r}{ }^*-\frac{1}{s i g L_{r t}}\left(\begin{array}{c}\left(V_{q r}^{e q}+V_{q r}^d\right)-R_{r t} I_{q r}-sigL_{rt} \omega_r I_{d r}-\omega_r \frac{M V_s}{\omega_s L_{s t}}\end{array}\right) \\ \dot{S}_{I_{d r}}={I^·}_{d r}{ }^*-\frac{1}{s i g L_{r t}}\left(\begin{array}{c}\left(V_{d r}^{e q}+V_{d r}^d\right)-R_{r t} I_{d r} -sigL_{rt} \omega_r I_{d r}\end{array}\right)\end{array}\right.$ (13)
In steady state, we obtain:
$\left\{\begin{array}{l}S\left(I_{q r}\right)=0 ; \dot{S}\left(I_{q r}\right)=0 ; V_{q r}^d=0 \\ S\left(I_{d r}\right)=0 ; \dot{S}\left(I_{d r}\right)=0 ; V_{d r}^d=0\end{array}\right.$ (14)
To ensure the convergence of the Lyapunov function, an assumption is made on the form of the discontinuous law function, as defined in [37], with:
$\left\{\begin{array}{l}V_{q r}^d=K_{I_{q r}} Sign\left(S\left(I_{q r}\right)\right) \\ V_{d r}^d=K_{I_{d r}} Sign\left(S\left(I_{d r}\right)\right)\end{array}\right.$ (15)
Finally, the DFIG order formula is as follows:
$\left\{\begin{array}{l}\begin{gathered}V_{q r}=K_{I_{q r}} Sign\left(S\left(I_{q r}\right)\right)+\operatorname{sig} L_{r t}\left({I^·}_{q r}{ }^*+\frac{R_{r t}}{sig L_{r t}} I_{q r}\right. \left.+\omega_r I_{d r}+\omega_r \frac{M V_s}{\omega_s L_{s t}}\right)\end{gathered} \\ \begin{gathered}V_{d r}=K_{I_{d r}} Sign\left(S\left(I_{d r}\right)\right)+sig L_{r t}\left({I^·}_{d r}{ }^*+\frac{R_{r t}}{sigL_{r t}} I_{d r}\right. \left.-\omega_r I_{q r}\right)\end{gathered}\end{array}\right.$ (16)
Applying sliding mode control (SMC) in DFIG systems offers distinct advantages, particularly in robustness and stability. SMC's ability to counteract system uncertainties and disturbances makes it highly suitable for DFIGs, which often operate under variable and unpredictable conditions. The introduction of the Lyapunov function in this context is pivotal, as it provides a mathematical foundation to ensure system stability. By demonstrating that the system's energy decreases over time according to the Lyapunov function, we can assert the stability of DFIG systems under the influence of SMC. This connection underscores the relevance of SMC in maintaining consistent performance and reliability of DFIG systems in diverse operational scenarios.
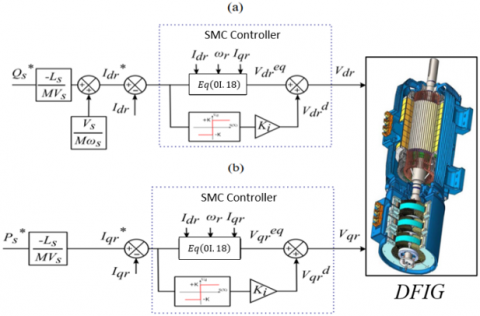
Figure 11 shows a block diagram of the SMC command we used to control the DFIG.
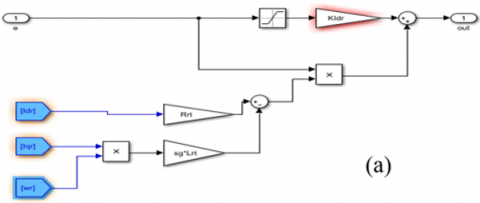
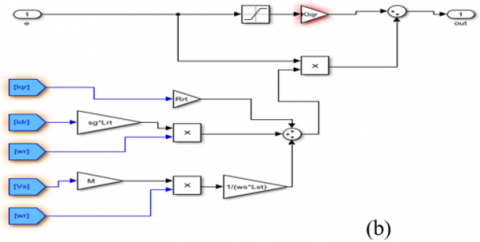
Figure 12 shows the block diagram that we created using MATLAB Simulink.
Figure 11. The DFIG control diagram with control (SMC):
Figure 12. The DFIG control diagram with control (SMC): (a) Control of reactive power Qs; (b) Controls the active power Ps
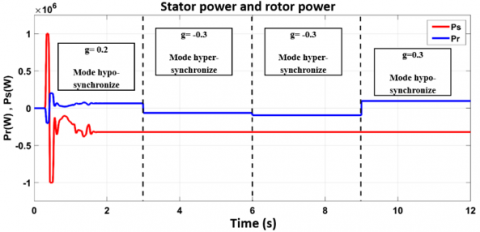
We will conduct simulations with varying slip values, encompassing both operating modes of the DFIG: sub-synchronous and super-synchronous per Figure 13.
Figure 13. Simulation results of the DFIG model with different slip values
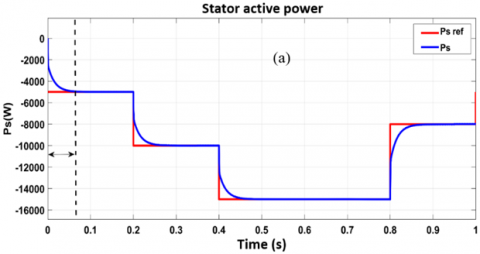
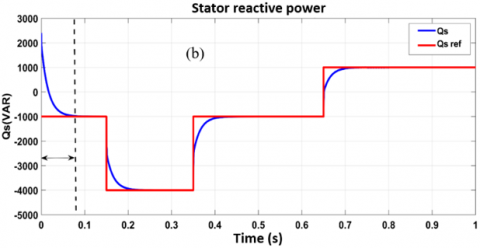
Figure 14. FIG control simulation results with the PI regulator using the direct method: (a) Controls the active power Ps; (b) Control of reactive power Qs
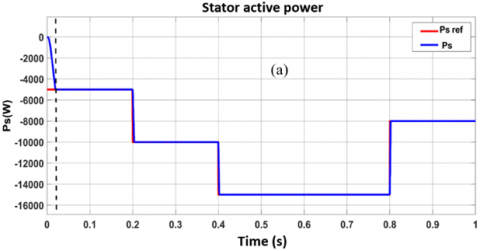
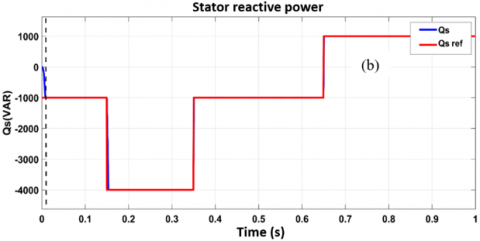
Figure 15. PI indirect method without power loop: (a) Ps; (b) Qs
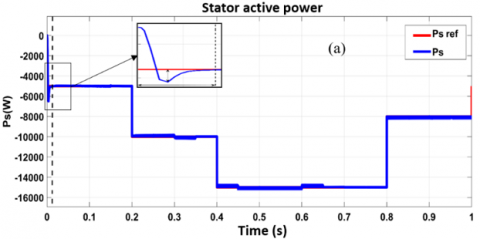
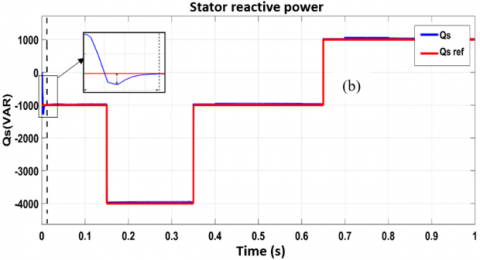
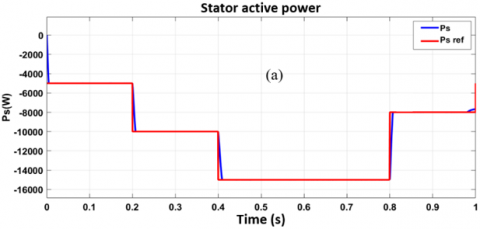
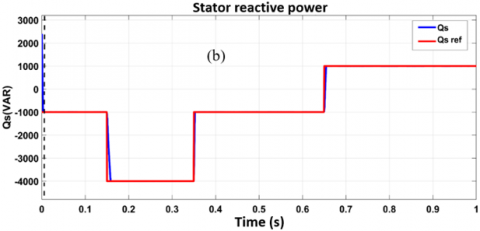
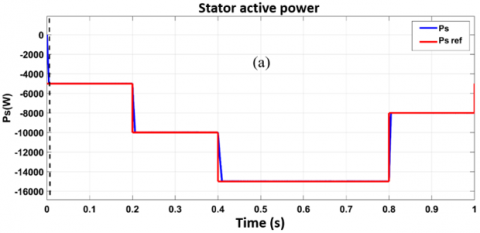
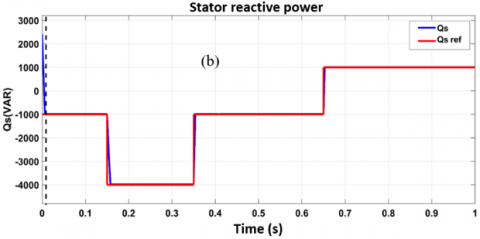
Having presented the simulation results for each of the three controllers (PI, fuzzy, and sliding mode) in the separate DFIG control across Figures 14-19, we will now evaluate the performance of each controller in terms of accuracy and response speed. Static error analysis measures the controller's accuracy in terms of reference tracking, while response time measures how quickly the system responds to load variations. These performance criteria are essential to assess each controller's suitability and determine which suits the system's needs best.
Table 2 compares the performance of the three controllers (PI, fuzzy, and sliding mode) in the separate control of the DFIG based on the criteria of accuracy and speed. Where: D (%) is the ratio between the first peak and the consignment.
Figure 16. PI indirect method with power loop: (a) Ps; (b) Qs
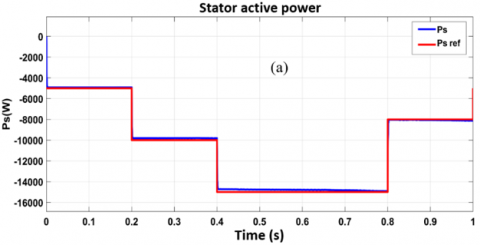
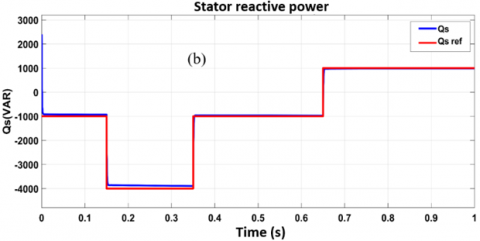
Figure 17. DFIG control simulation results with the fuzzy regulator using the direct method: (a) Controls the active power Ps; (b) Control of reactive power Qs
From the analysis in the table, the indirect control without a power loop offers better performance than the direct method, particularly in overshoot. In addition, it proved less complex and presented a shorter response time than the indirect control with a power loop, which offered a long response time due to its complexity. Regarding the fuzzy controller, a direct method by this controller produced results similar to the indirect rule but with a slight difference. This controller produced very satisfactory results without requiring detailed mathematics.
Analysis of the system and succeeded in reducing static error and improving system performance by reducing response time. However, it should be noted that the design and implementation of this controller require expertise in the field of fuzzy logic. Compared with the sliding-mode controller, we note that it is based on mathematical equations and requires a detailed mathematical model of the system. Although this controller has a slightly longer response time than the fuzzy controller, it still outperforms the PI controller.
Figure 18. DFIG control simulation results with the fuzzy regulator using the indirect method: (a) Controls the active power Ps; (b) Control of reactive power Qs
Figure 19. DFIG control simulation results with sliding mode controller: (a) Controls the active power Ps; (b) Control of reactive power Qs
Table 2. Performance criteria for DFIG control
|
Performance Criteria: Active Power |
||||||
|
Performance |
Vector control with PI regulator |
Fuzzy controller control |
SMC |
|||
|
Direct |
Indirect without power loop |
Indirect with power loop |
Direct control |
Indirect control |
||
|
D (%) |
30 |
0 |
0 |
0 |
0 |
0 |
|
Static error (%) |
1.787 |
1.627 |
0.0631 |
0.01 |
0.01 |
0.17 |
|
Response time (s) |
0.012 |
0.0025 |
0.0625 |
0.0065 |
0.0053 |
0.006125 |
|
Performance Criteria: Reactive Power |
||||||
|
Performance |
Vector control with PI regulator |
Fuzzy controller control |
SMC |
|||
|
Direct |
Indirect without power loop |
Indirect with BP |
Direct control |
Indirect control |
||
|
D (%) |
28.8 |
0 |
0 |
0.25 |
0 |
0 |
|
Static error AVG (%) |
4.356 |
5.281 |
0.11 |
0.05 |
0.04 |
0.912 |
|
Response time (s) |
0.00755 |
0.003 |
0.095 |
0.00312 |
0.00445 |
0.0054 |
|
Implem-entation |
Simple |
Moderately complex |
Complex |
Complex (Requires an expert) |
Complex (Based on equations) |
|
Control Mechanisms for DFIG: Harnessing the full potential of wind energy necessitates advanced control systems, especially when dealing with the complexities of a doubly-fed induction generator (DFIG). Our investigation evaluated three distinct regulators: Proportional-Integral (PI), fuzzy logic, and sliding mode.
PI Control: The PI control mechanism, a traditional approach, offers stability and simplicity. While it is adept at handling linear systems and disturbances, its performance can be compromised in nonlinear scenarios or during rapid wind fluctuations.
Fuzzy Logic Control: Fuzzy logic, a more modern approach, is designed to handle uncertainties and nonlinearities inherent in wind energy systems. Employing linguistic variables and rule-based systems offers a more adaptive control mechanism. However, its performance relies heavily on the rule base, and designing an optimal rule base can be challenging.
Sliding Mode Control: Sliding Mode is a nonlinear control strategy that offers robustness against system uncertainties and external disturbances. Its main advantage lies in its insensitivity to parameter variations and external disturbances. However, the challenge with sliding mode control is the chattering phenomenon, which can introduce high-frequency oscillations in the system.
Comparative Analysis: Our comparative analysis revealed that while each regulator has its strengths, their performance is context-dependent. The PI control offers reliable performance for steady wind conditions and linear scenarios. However, fuzzy logic and sliding mode controls exhibit superior adaptability and robustness in systems with rapid wind fluctuations or nonlinearities. This confirms the findings of the comparative studies [36, 37], which concluded that the sliding-mode control and fuzzy controller are capable of enhancing system robustness to parameter variations and wind speed fluctuations compared to classical vector control (PI).
It's worth noting that the optimal choice of regulator is also influenced by other factors, such as implementation complexity, computational requirements, and system specifications. For instance, while fuzzy logic offers adaptability, it might require more computational resources than PI control.
The choice of control mechanism for DFIG in wind turbines should be based on a holistic evaluation considering the operational conditions and system requirements. Our study provides a foundation for such assessments, shedding light on the intricacies of each control strategy and their applicability in real-world scenarios.
In exploring control mechanisms for doubly-fed induction generators (DFIG) in wind turbines, we delved into three distinct regulators: PI, fuzzy logic, and sliding mode. Each regulator exhibited unique strengths and challenges, emphasizing the importance of context in selecting an optimal control strategy. While the PI control offers simplicity and reliability in linear scenarios, fuzzy logic and sliding mode controls provide adaptability and robustness in more complex, fluctuating conditions.
Our research contributes to the growing knowledge of wind turbine control systems, offering insights that can guide academic research and practical implementations. However, it's essential to acknowledge that the real-world application of these control strategies might be influenced by factors beyond the scope of this study, such as specific turbine designs, local wind conditions, and grid requirements.
Future investigations could delve deeper into hybrid control strategies, combining the strengths of the regulators studied here. Additionally, as wind energy technology evolves, there will be a continuous need to adapt and refine control mechanisms to harness wind power efficiently and sustainably.
This comparison provides valuable insights into the relative effectiveness of these controllers in terms of response time, system complexity, and overall performance. While this analysis offers a foundational understanding of the different control strategies under specific conditions, we acknowledge the potential for a more comprehensive quantitative evaluation. Future research should expand upon this groundwork by incorporating a more comprehensive range of performance metrics, detailed benchmarking against industry standards, and possibly integrating real-world case studies. Such an extended analysis would not only reinforce the findings presented herein but also provide a more nuanced understanding of the applicability and efficiency of these control systems in diverse operational scenarios of wind energy management.
From a broader perspective, optimizing control strategies for wind turbines is not just a technical challenge but a crucial step toward a sustainable energy future. As the world grapples with the pressing need for clean energy, research like this plays a pivotal role in ensuring we harness the full potential of available renewable resources.
[1] O'Shaughnessy, E., Heeter, J., Shah, C., Koebrich, S. (2021). Corporate acceleration of the renewable energy transition and implications for electric grids. Renewable and Sustainable Energy Reviews, 146: 111160. https://doi.org/10.1016/j.rser.2021.111160
[2] Ibrahim, I.D., Hamam, Y., Alayli, Y., Jamiru, T., Sadiku, E.R., Kupolati, W.K., Ndambuki, J.M., Eze, A.A. (2021). A review on Africa energy supply through renewable energy production: Nigeria, Cameroon, Ghana and South Africa as a case study. Energy Strategy Reviews, 38: 100740. https://doi.org/10.1016/j.esr.2021.100740
[3] Sadorsky, P. (2021). Wind energy for sustainable development: Driving factors and future outlook. Journal of Cleaner Production, 289: 125779. https://doi.org/10.1016/j.jclepro.2020.125779
[4] Mostafaeipour, A. (2010). Productivity and development issues of global wind turbine industry. Renewable and Sustainable Energy Reviews, 14(3): 1048-1058. https://doi.org/10.1016/j.rser.2009.10.031
[5] Triantafyllou, P., Kaldellis, J.K. (2022). 2.16-Wind Power Industry and Markets. In Comprehensive Renewable Energy (Second Edition), Letcher, T.M. Ed., Oxford: Elsevier, pp. 497-566. https://doi.org/10.1016/B978-0-12-819727-1.00157-6
[6] Farfan, J., Breyer, C. (2017). Structural changes of global power generation capacity towards sustainability and the risk of stranded investments supported by a sustainability indicator. Journal of Cleaner Production, 141: 370-384. https://doi.org/10.1016/j.jclepro.2016.09.068
[7] Gadouche, Z., Belfedal, C., Allaoui, T., Denai, M., Bey, M. (2022). Hybrid renewable energy system controlled with intelligent direct power control. Journal Européen des Systèmes Automatisés, 55(4): 467-475. https://doi.org/10.18280/jesa.550405
[8] Bouziane, Y.S., Henini, N., Tlemçani, A. (2022). Energy management of a hybrid generation system based on wind turbine coupled with a battery/supercapacitor. Journal Européen des Systèmes Automatisés, 55(5): 623-631. https://doi.org/10.18280/jesa.550507
[9] El Zoghby, H.M., Ramadan, H.S. (2022). Enhanced dynamic performance of steam turbine driving synchronous generator emulator via adaptive fuzzy control. Computers & Electrical Engineering, 97: 107666. https://doi.org/10.1016/j.compeleceng.2021.107666
[10] Saeed, M.A., Khan, H.M., Ashraf, A., Qureshi, S.A. (2018). Analyzing effectiveness of LVRT techniques for DFIG wind turbine system and implementation of hybrid combination with control schemes. Renewable and Sustainable Energy Reviews, 81: 2487-2501. https://doi.org/10.1016/j.rser.2017.06.054
[11] Menezes, E.J.N., Araújo, A.M., Da Silva, N.S.B. (2018). A review on wind turbine control and its associated methods. Journal of Cleaner Production, 174: 945-953. https://doi.org/10.1016/j.jclepro.2017.10.297
[12] Apata, O., Oyedokun, D.T.O. (2020). An overview of control techniques for wind turbine systems. Scientific African, 10: e00566. https://doi.org/10.1016/j.sciaf.2020.e00566
[13] Hu, R., Le, C., Gao, Z., Ding, H., Zhang, P. (2021). Implementation and evaluation of control strategies based on an open controller for a 10 MW floating wind turbine. Renewable Energy, 179: 1751-1766. https://doi.org/10.1016/j.renene.2021.07.117
[14] Tasneem, Z., Al Noman, A., Das, S.K., Saha, D.K., Islam, M.R., Ali, M.F., Badal, M.F.R., Ahamed, M.H., Moyeen, S.I., Alam, F. (2020). An analytical review on the evaluation of wind resource and wind turbine for urban application: Prospect and challenges. Developments in the Built Environment, 4: 100033. https://doi.org/10.1016/j.dibe.2020.100033
[15] Ahlem, C., Benretem, A., Dobrev, I., Barkati, B. (2020). Comparative study of two control strategies proportional integral and fuzzy logic for the control of a doubly fed induction generator dedicated to a wind application. International Journal of Power Electronics and Drive Systems, 11(1): 263-274. https://doi.org/10.11591/ijpeds.v11.i1.pp263-274
[16] Zhao, J., Fang, Y., He, Y., Fang, J., Wen, L., Liang, Y., Xiao, S. (2021). Active power control strategy of wind farm considering fatigue load of wind turbines. Energy Reports, 7: 1466-1476. https://doi.org/10.1016/j.egyr.2021.09.096
[17] El Alami, H., Bossoufi, B., Motahhir, S., Alkhammash, E.H., Masud, M., Karim, M., Taoussi M, Bouderbala M, Lamnadi M, El Mahfoud, M. (2021). FPGA in the loop implementation for observer sliding mode control of DFIG-generators for wind turbines. Electronics, 11(1): 116. https://doi.org/10.3390/electronics11010116
[18] Yin, X., Zhang, W., Zhao, X. (2019). Current status and future prospects of continuously variable speed wind turbines: A systematic review. Mechanical Systems and Signal Processing, 120: 326-340. https://doi.org/10.1016/j.ymssp.2018.05.063
[19] Maheshwari, Z., Kengne, K., Bhat, O. (2023). A comprehensive review on wind turbine emulators. Renewable and Sustainable Energy Reviews, 180: 113297. https://doi.org/10.1016/j.rser.2023.113297
[20] Reddy, K., Saha, A.K. (2022). A review of swarm-based metaheuristic optimization techniques and their application to doubly fed induction generator. Heliyon, 8(10): e10956. https://doi.org/10.1016/j.heliyon.2022.e10956
[21] Mousavi, Y., Bevan, G., Kucukdemiral, I.B., Fekih, A. (2022). Sliding mode control of wind energy conversion systems: Trends and applications. Renewable and Sustainable Energy Reviews, 167: 112734. https://doi.org/10.1016/j.rser.2022.112734
[22] Desalegn, B., Gebeyehu, D., Tamrat, B. (2022). Wind energy conversion technologies and engineering approaches to enhancing wind power generation: A review. Heliyon, 8(11): e11263. https://doi.org/10.1016/j.heliyon.2022.e11263
[23] Morel, L., Godfroid, H., Kauffmann, J.M. (1997). Field oriented control of a double fed asynchronous machine: Modelling and implementation. IFAC Proceedings Volumes, 30(6): 1101-1106. https://doi.org/10.1016/S1474-6670(17)43510-5
[24] Zemmit, A., Messalti, S., Harrag, A. (2018). A new improved DTC of doubly fed induction machine using GA-based PI controller. Ain Shams Engineering Journal, 9(4): 1877-1885. https://doi.org/10.1016/j.asej.2016.10.011
[25] Kang, J.K., Sul, S.K. (1999). New direct torque control of induction motor for minimum torque ripple and constant switching frequency. IEEE Transactions on Industry Applications, 35(5): 1076-1082. https://doi.org/10.1109/28.793368
[26] Jenkal, H., Bossoufi, B., Boulezhar, A., Lilane, A., Hariss, S. (2020). Vector control of a doubly fed induction generator wind turbine. Materials Today: Proceedings, 30: 976-980. https://doi.org/10.1016/j.matpr.2020.04.360
[27] Bossoufi, B., Karim, M., Lagrioui, A., Taoussi, M., Derouich, A. (2015). Observer backstepping control of DFIG-Generators for wind turbines variable-speed: FPGA-based implementation. Renewable Energy, 81: 903-917. https://doi.org/10.1016/j.renene.2015.04.013
[28] Shinskey, F.G. (2005). Special rules for tuning level controllers (part-1). Control (Chicago, Ill), 18(5): 51-54.
[29] Chaillet, A., Loría, A., Kelly, R. (2007). Robustness of PID-controlled manipulators vis-à-vis actuator dynamics and external disturbances. European Journal of Control, 13(6): 563-576. https://doi.org/10.3166/ejc.13.563-576
[30] Egiguren, P.A., Caramazana, O.B., Hernández, I.G., Hernández, A.J.G. (2008). Robust adaptive variable structure control of induction motor drives. In 2008 IEEE International Symposium on Industrial Electronics, Cambridge, UK, pp. 582-587. https://doi.org/10.1109/ISIE.2008.4676940
[31] Shu, J., Zhang, B.H., Cheng, L.Y., Wang, C.G., Li, P., Bo, Z.Q., Klimek, A. (2009). Doubly fed induction wind generator model and its operation investigation. In 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, pp. 1-5. https://doi.org/10.1109/APPEEC.2009.4918293
[32] Tamalouzt, S., Belkhier, Y., Sahri, Y., Bajaj, M., Ullah, N., Chowdhury, M.S., Titseesang, T., Techato, K. (2021). Enhanced direct reactive power control-based multi-level inverter for DFIG wind system under variable speeds. Sustainability, 13(16): 9060. https://doi.org/10.3390/su13169060
[33] Krichen, L., Francois, B., Ouali, A. (2008). A fuzzy logic supervisor for active and reactive power control of a fixed speed wind energy conversion system. Electric Power Systems Research, 78(3): 418-424. https://doi.org/10.1016/j.epsr.2007.03.010
[34] Jerbi, L., Krichen, L., Ouali, A. (2009). A fuzzy logic supervisor for active and reactive power control of a variable speed wind energy conversion system associated to a flywheel storage system. Electric Power Systems Research, 79(6): 919-925. https://doi.org/10.1016/j.epsr.2008.12.006
[35] Bekakra, Y., Attous, D.B. (2011). Sliding mode controls of active and reactive power of a DFIG with MPPT for variable speed wind energy conversion. Australian Journal of Basic and Applied Sciences, 5(12): 2274-2286.
[36] Krim, Y., Abbes, D., Krim, S., Mimouni, M.F. (2018). Classical vector, first-order sliding-mode and high-order sliding-mode control for a grid-connected variable-speed wind energy conversion system: A comparative study. Wind Engineering, 42(1): 16-37. https://doi.org/10.1177/0309524X17723202
[37] Belaimeche, F.Z., Bentaallah, A., Massoum, S., Wira, P. (2018). A comparative study between a simplified fuzzy PI and classic PI input-output linearizing controller for the wind-turbine doubly fed induction generator. ELEKTRO TEHNIŠKI VESTNIK, 85(4): 142-148. https://doi.org/10.1504/IJAAC.2017.080819