Mahmoud M.S. Al-Suod![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In the paper the influence of Ethernet network dynamics on the quality of diesel-generator control is considered. The control quality indicators depend on time delays in the transmission of data packets over the Ethernet network. The optimization task of minimizing such time delays to improve the control quality was resolved. The Lagrange's method of undetermined multipliers and Bellman optimality rule were used for the analytical solution of the problem of minimizing time delays. A Matlab-model was developed for the research of the impact of time delays on the diesel-generator control quality, in which the Ethernet network is used as a data transmission channel between control objects and regulators. The scientific novelty of the results is in the improvement of the analytical method for analysing the characteristics of the automated control systems information processing network to study the influence of network dynamics on the quality of control of diesel-generators and determining the intensity of transmission of information and control packets, as well as using the proposed optimal conflict resolution rule, using which the transmission time delays data are minimal. This reduces the number of conflicts between the processes claiming the resources by almost 2 times and increases the quality of control.
distributed control system, digital state machine, PID regulator, diesel-generator, Ethernet, transient process quality
Modern automated control systems (ACS) of diesel-generator autonomous electric power systems (AEPS) becomes distributed and hierarchical, by analogy with the wind/solar/battery standalone power stations [1], and the information exchange between the elements of the system is carried out using a network. More often it can be found control systems for diesel-generator units (DGU) in which remote PID controllers are used, and in the control loop there is a data link (i.e., network) that introduces non-constant time delays in data transmission. At the same time, the control quality of AEPS facilities directly depends on the quality of the network. At the initial stage of designing the ACS AEPS, the most important is the information survey of the control object, the main task of which is to determine the information flows. In particular, the increase in time delays in data transmission over the network has a negative impact on the control quality of DGU. Therefore, the use of analytical methods for research and improvement of information support for AEPS is relevant.
An increase in both the complexity of modern AEPS and the requirements for the quality of electricity in these systems poses a problem of a thorough study of AEPS at various design stages. Along with the introduction of digital distributed control systems, one has faced the problem of ensuring a given level of control quality [2, 3]. The efficiency of automatic control systems in the event of a significant distance towards the control object is to some extent related to the time delay of signal transfer (i.e., propagation delay) generated by the nodes of the system [4, 5]. The presence of a delay most frequently affects the performance of the system in general. It's not always possible to eliminate delays via technical means. In this case, the need for theoretical assessment and forecasting of delays, as well as determining their impact on the system stability are of primary significance. Increasing amounts of processed and transferred information may result in false distorted data, thus providing for incorrect control modes of operation of the entire system. In addition, a delay in the transfer of information and control datasets via the network may cause a deterioration in the quality of both controls over the excitation of the generator and the speed of the diesel unit, which in turn will cause a deterioration in the quality of electric energy and malfunction of the operating mode of the entire AEPS.
In studies [6-8], methods for calculating the delays in the transmission of data packets over a network are considered. At the same time, the process of controlling an AEPS via the Ethernet network using the developed specialized software is considered. In the example of a specific power plant, numerical values of the time delay were obtained for the transmission of information and control packets over the network. However, the issue of modeling the control process of a diesel generator set as part of an AEPS remained unresolved in terms of assessing the influence of the calculated values of time delays on the control quality indicators. The solution of this problem will make it possible at the design stage of the ACS AEPS not only to calculate the numerical values of possible time delays in data transmission for a specific topology but also to simulate the control process in the presence of such delays and evaluate their impact on the quality of control. This, in turn, will make it possible to determine the admissibility of the values of the calculated time delays in solving the problems of AEPS control, and, if necessary, to take measures to reduce or compensate for them. To compensate for time delays in data transmission during network control, one of the known methods can be used, such as a prediction-based hierarchical delay compensation technique [9] or an adaptive method of time delay compensation in networked control systems [10]. In papers [11-14], the simulation of the operation of DGUs as part of AEPS, including ship power plants, in the presence of emergencies, voltage frequency fluctuations, and instability of the drive diesel speed was done, but control matters in the presence of a signal delay were not considered. The complexity of solving these problems is mainly due to the fact that requests over the network differ from each other not only in the intensity of arrival and quality of service requirements, but also in the number of channels called in the route [15]. A brief overview of issues related to the study of models of multi-resource systems can be found in the study [16]. It is noted [17] that the maximization of the load of network channels can serve as a criterion for optimizing the functioning of the network. However, in this case, the problem of organizing access to the communication channel arises. When data is transmitted simultaneously from two or more nodes, a collision occurs, and the network will become unavailable. In the well-known models of circuit-switched networks with fixed routing [18, 19], an incoming request requires several channels to be serviced simultaneously in each line included in its route. In this case, if at least one line of the route does not have the required number of free channels, then the incoming request is rejected. In the most known research, including [20, 21], it is supposed to use a simple access strategy, according to which a request of any type is accepted into the network if at the time of its arrival there are a sufficient number of channels in each line included in its route. The request type is determined by the number of channels called for service. However, it is obvious that a simple access strategy does not allow optimizing the network operation according to the chosen quality criterion, and most often the criterion is to maximize the load of the network channels [22]. In this case, information flows can be distributed both along different routes and along different channels. The work [23] considers the issues of optimal routing of information flows but does not take into account that there is only one transmission channel between nodes.
The main objective of the paper is to develop a distributed Matlab-model for conducting model studies of the influence of variable time delays in data transmission over the network on the diesel-generator control quality, which occur when using remote PID controllers and the Ethernet network in the control loop and find the ways to improve the control quality, by minimizing the time delays of data transmission over the network and evaluate their effectiveness by analytical means.
In this paper, to simulate the control process in the presence of a non-constant time delay in the transmission of control signals, which more adequately reflects the real situation when transmitting data over the network, it is necessary to switch from continuous transfer functions of diesel speed controllers and the excitation system of a synchronous generator to their discrete forms. In this case, the controllers can be considered as an implementation of digital filters [24] and described by different equations. This, in turn, will make it possible to implement such controllers in Matlab in the form of a digital state machine (finite state machine), as shown in the study [25] using the example of implementing a PID controller. Changing the sampling period in the same range in which the time delay of data transmission over the network varies will allow us to investigate its effect on the quality indicators of diesel generator control. To achieve the aim of the research it is necessary to:
1. Develop the structure of a distributed control system, perform a discrete Z-transform of continuous transfer functions of a diesel engine and a generator to replace them with discrete equivalents presented in the form of digital state machine, which will allow to research the effect of the sampling rate on the control quality, in particular, on transients.
2. Develop a Matlab model of an AEPS with a diesel-generator and a remote PID controller, which contains the Ethernet network in the control channel and evaluate the effect of time delays on the integral quality criterion for diesel generator control.
3. Perform an analysis of the characteristics of the data transmission network by analytical method and formulate an optimization criterion to minimize the resulting time delays in the data transmission.
4. Propose the optimal rule for resolving conflicts arising from simultaneous access to the communication channel of several resources in order to improve the quality of remote control of diesel generators as part of the AEPS and evaluate its effectiveness.
Data transmission over the Ethernet network does not occur instantly, but with some non-constant delay. The time delay τ is the time interval between the moment of sending a data packet (in this case, the error value – the difference between the required and actual values of the controlled parameter), and the moment they are received and fed to the input of the remote PID controller. The time delay of a signal while passing from sender to recipient consists of several parts: the time required for processing at each node, the time required for transfer, as well as the time required for signal propagation. Each stage may differ in duration, which is determined by the network integrity, as well as by various uncontrolled random reasons. In this paper, one assumes that the time delay τ is a continuous random variable having a certain distribution law. Statistical methods of analysis allow the empirical build of a distribution curve for a given random variable. Once it is built, one may find an approximate time delay as the area under the distribution curve is within a given range. Unless one manages to analytically describe the probability density of a given distribution, then the problem of finding out the probability of a delay hitting a given range can be solved using a specified integral:
$P(\alpha <\tau <\beta )=\int\limits_{a}^{b}{f(\tau )d\tau }$,
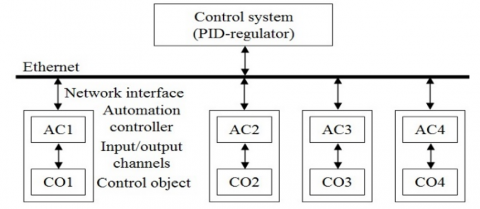
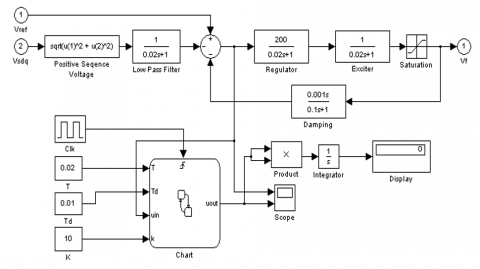
where, τ is the time delay, f(τ) is the probability density of a random variable τ. The control object covers both the field winding of the synchronous generator and a diesel unit equipped with a speed regulator. The diesel generator is controlled via the network interface by the automation regulator, where the control algorithm is implemented in software. Figure 1 shows a block diagram of a distributed control system along with a remote regulator.
The time-delay line introduces a signal delay to a variable T, which depends both on the sampling interval ν (the distance in units of time between which measurements are taken) and the intensity of requests λ:
$T=f(\nu ,\lambda )$.
The intensity of requests in this case is defined as the number of data packets sent over the network within a certain time interval, for instance 1 sec.
Figure 1. Structure of a distributed control system equipped with a PID regulator
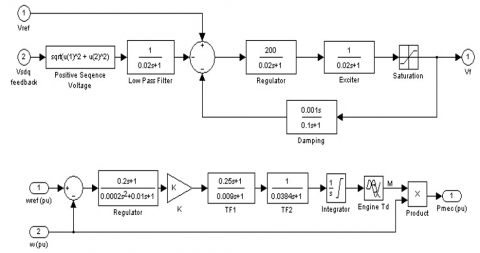
The paper [26] describes the reasons why digital control sampling intervals cannot be considered the same. It is also substantiated here that in this event, the digital control system's behavior would be rather difficult to analyze analytically, thus the simulation modeling is acceptable. Modeling of the control systems operation is done by replacing a continuous regulator with a digital one, which is implemented in software as a digital state machine in a micro regulator, as well as by varying the time intervals between the variation of the state machine states. Models of the synchronous generator and diesel engine excitation system developed in the Matlab Simulink dataset [27, 28] are presented in Figure 2.
Figure 2. Models of synchronous generator excitation system and diesel engine speed control systems
The reference value of the excitation voltage is set at the input Vref of the adder, and the actual value of the generator voltage is input to the input Vsdq, after which a positive sequence voltage is formed, which is fed to the input of the low-pass filter, which is represented by a 1st-order aperiodic link with a time constant of 0.02 s, which corresponds to the period of mains voltage. Signal filtering is necessary to eliminate the influence of high-frequency interference on the generator excitation control process. At the output of the adder, an error signal is generated, which is fed to the input of the excitation controller. Physically, the excitation of a synchronous generator occurs by changing the voltage on the excitation winding, which is an inductance with a negligibly small active resistance and this part of the model is described by an aperiodic link. The saturation block limits the maximum excitation value of the synchronous generator.
The input of the diesel unit speed control system receives the reference speed value and the actually measured one. At the output of the adder, an error signal is generated, equal to the difference between the required and actual values of the diesel engine speed. This signal is fed to the input of the speed controller. At the output of the regulator, a control signal is generated, which is fed to the actuator, which controls the position of the diesel fuel rail. A DC motor is used as an actuator.
A simplified model of a diesel unit is represented by an aperiodic link and an integrator connected in series with it, which considers the inertia of the masses. In addition, the model also has a delay link, which takes into account the delay in the speed control loop, due to the fact that when the position of the fuel rail changes, the combustible mixture enters the cylinders and ignites not immediately, but with some delay, which is due to the design features of diesel engines. The mechanical power value at the output of the diesel model is obtained by multiplying the actual value of the diesel revolutions by the torque.
When replacing continuous regulators with digital ones, the models presented in Figure 2 will be hybrid [29] and characterized by a variable delay value in control signals. That is, the control system will have a digital regulator along with a variable sampling period. The transfer function of the synchronous generator excitation system is as follows:
${{W}_{EX}}(s)=\frac{{{K}_{p}}}{{{T}_{d}}s+1}=\frac{10}{0.01s+1}$
where, Kp is the gain factor, Td is the integration time constant.
To obtain an adequate model of a discrete system, it is necessary to discretize a continuous system. The most common sampling method is sampling using a zero-order extrapolator (Zero order hold device). The zero-order extrapolator generates a continuous signal by fixing the previous discrete value before the impact of the next, i.e.
$u(t)=u[k],k{{T}_{s}}\le t\le (k+1){{T}_{s}}$
The transfer function of the discrete model:
$H(z)=(1-{{z}^{-1}})Z\left\{ \frac{H(p)}{p} \right\}$
where, Z means the operation of the Z-transform of the original continuous system transition function.
After performing the Z-transform, the transfer function WEX(z) of the digital controller of the generator excitation system is:
${{W}_{EX}}(z)=Z\left\{ \frac{1-{{e}^{-s{{T}_{s}}}}}{s}\frac{{{K}_{p}}}{1+{{T}_{d}}s} \right\}=\frac{b{{z}^{-1}}}{1-a{{z}^{-1}}}=\frac{8.65{{z}^{-1}}}{1-0.135{{z}^{-1}}}$
where, the coefficients a and b are calculated using equations:
$a={{e}^{-\frac{{{T}_{s}}}{{{T}_{d}}}}}$
$b={{K}_{p}}(1-a)$
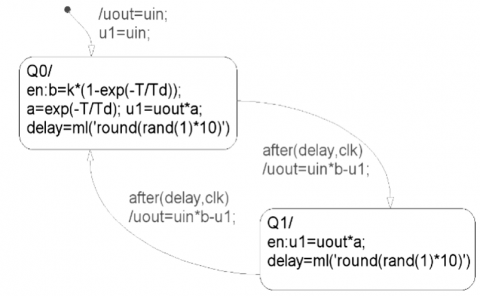
The implementation of a generator excitation digital control system in the form of the digital state machine states diagram is presented in Figure 3(a).
Figure 3(b) shows transition graphs of a digital state machine that implements the given control law alongside the modeling of the control signal time delay.
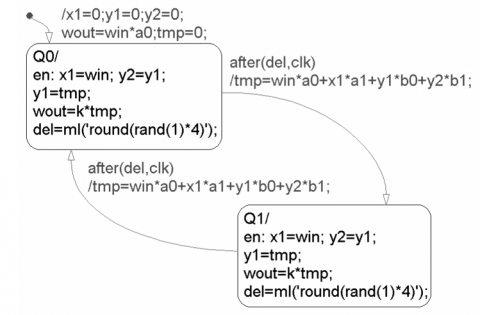
(a) Speed control state machine of diesel unit
(b) Control state machine for the excitation system
Figure 3. Transition graphs of digital state machines for the generator excitation
The transfer function of the diesel unit control system WDG(s) is as follows:
${{W}_{DG}}(s)=\frac{K({{T}_{0}}s+1)}{{{T}_{1}}{{s}^{2}}+{{T}_{2}}s+1}=\frac{40(0.2s+1)}{0.0002{{s}^{2}}+0.01s+1}$
where, K is the gain factor, T1, T2, T3 are the regulator time constants.
Upon performing the Z-transform, the transfer function of the digital regulator at a sampling period of 0.01 seconds is as follows:
${{W}_{DG}}(z)=40\cdot \frac{7.437-7.06{{z}^{-1}}}{1-1.229{{z}^{-1}}+0.606{{z}^{-2}}}$
When the sampling period is reduced by 10 times, the transfer function of the diesel speed regulator is as follows:
${{W}_{DG}}(z)=40\cdot \frac{0.9771-0.9722{{z}^{-1}}}{1-1.946{{z}^{-1}}+0.9512{{z}^{-2}}}$
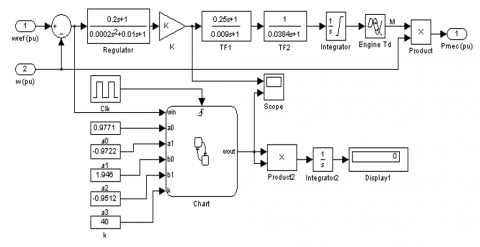
In Figure 4 a model for researching the synchronous generator (SG) excitation system regulator is shown. The sampling frequency for the digital state machine is set using the clock signal generator Clk.
Figure 4. A model for researching a digital regulator of the synchronous generator excitation system
In Figure 5 a model for researching of the diesel engine control system is shown.
Figure 5. A model for researching of the diesel engine digital control system
The average delay variable τ is calculated by the equation:
$\overline{\tau }=\frac{1}{n}\sum\limits_{i=1}^{k}{{{\tau }_{i}}{{n}_{i}}}$
The standard deviation S (a measure of the amount of variation or dispersion of a set of values) and the coefficient of variation VR (a statistical measure of the relative dispersion of data points in a data series around the mean) are taken as the variance features of this parameter. The variables are calculated by the following formulas:
$S=\sqrt{\frac{1}{n}\sum\limits_{i=1}^{k}{{{({{\tau }_{i}}-\overline{\tau })}^{2}}{{n}_{i}}}}$
$V_R=\left|\frac{S}{\bar{\tau}}\right| \cdot 100 \%$
If the coefficient of variation is less than 30%, it means that the sample is quite compact, i.e., the time delay varies within a small range.
The key regulator operation quality indicators, that are calculated from the transition feature, are overcorrection, oscillation, as well as integral assessment [30]. In this paper an integral pointer of the control quality criterion A is used to assess the control quality:
$A=\int\limits_{0}^{\infty }{{{(h(t)-{{h}_{st}}(t))}^{2}}}dt$
where, hst(t) is the parameter value in the steady state, after the end of transients, h(t) deviation of the parameter from the value in the steady state.
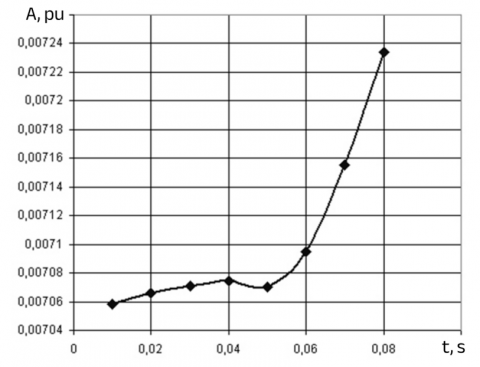
The value of the quality criterion integral indicator of the generator excitation control at the discretization period fluctuations different values are presented in Tables 1 and 2.
Table 1. The value of the integral indicator of the the SG excitation system control quality criterion
|
Δts, sec |
A, pu |
|
0.001 |
0.007058 |
|
0.002 |
0.007058 |
|
0.003 |
0.007058 |
|
0.004 |
0.007058 |
|
0.005 |
0.007058 |
|
0.006 |
0.007058 |
|
0.007 |
0.007058 |
|
0.008 |
0.007058 |
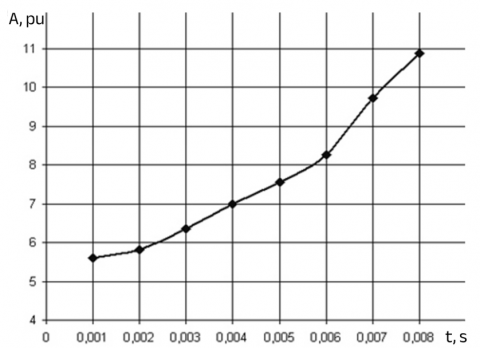
Table 2. The value of the integral indicator of the diesel engine control quality criterion
|
Δts, sec |
A, pu |
|
0.001 |
5.559 |
|
0.002 |
5.817 |
|
0.003 |
6.346 |
|
0.004 |
6.994 |
|
0.005 |
7.549 |
|
0.006 |
8.252 |
|
0.007 |
9.708 |
|
0.008 |
10.871 |
The dependence of the integral pointer of the control quality criterion on the delay in transferring information and control datasets towards the remote regulator of the synchronous generator excitation system is presented in Figure 6(a). The dependence of the integral control quality criterion on the delay in transferring information and control datasets towards the remote diesel unit speed regulator is presented in Figure 6(b).
As one can see from the diagrams, an increase in the delay variable deteriorates control quality. Therefore, to control automation objects in real-time mode one should minimize delays in transferring datasets via the network. This messages, optimizing thread processing algorithms within network nodes, as well as dividing threads into service classes to specify the most priority ones [31]. The paper is focused on reducing the time of information and control datasets to be transferred via the network.
The presence of an Ethernet network in the control loop, which can be considered as a delay line, introduces a signal delay by an amount that depends on the sampling interval and the intensity of requests (i.e., network congestion):
$T=f(\nu ,\lambda )$
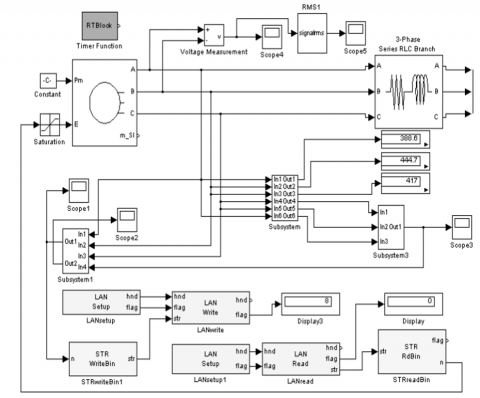
The developed Matlab model for researching diesel generator control processes over the network includes a minimal set of objects that are interconnected and allow external control (Figure 7).
The generator is represented by a model of a synchronous machine with a damper winding. Machine parameters are set in the system of absolute units. The power of the generator is 400 kW, the linear voltage on the stator is 380V. The generator has 2 pairs of poles (nominal frequency of rotation is 1500 rpm). Two computers connected via a local Ethernet network are used to simulate the process.
(a) Synchronous generator excitation system
(b) Diesel unit speed
Figure 6. Dependencies of integral control quality criterion values on the time delays
Figure 7. Matlab model of the studied system
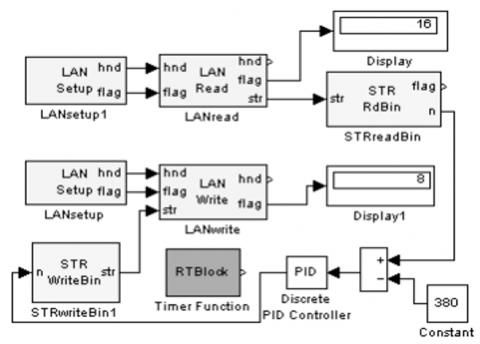
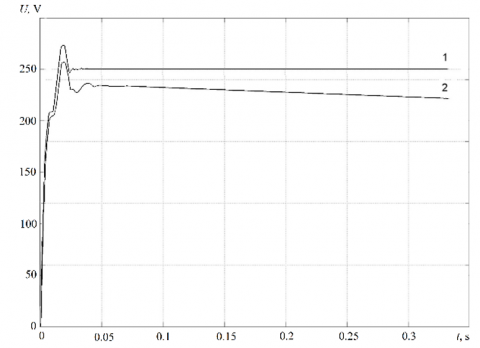
In Figure 8(a), a model of a remote controller is presented, which contains the controller itself, as well as blocks for organizing communication over a local network. In Figure 8(b), the simulation results are presented.
(a) Remote PID controller model
(b) Simulation results
Figure 8. Results of simulation two transition process curves
When creating the model, the CommStr6.5 Blockset libraries were used. This model uses blocks: "LAN Setup", "LAN Write" and "LAN Read". The "STR WriteBin" and "STR RdBin" blocks were used to format the transmitted data. The "LAN Setup" module performs LAN connection setup. In the settings window that opens, it is necessary to set the port number and IP address of the remote computer. The output of this module is a handle to an open port used by other blocks. The "LAN Write" block is used for data transfer. The input of the block receives the data that will be transmitted. In the dialog box for setting the parameters of the "STR WriteBin" block, the mask is specified, according to which the packet for transmission will be generated.
As a result of simulation, two transition process curves were obtained. Curve (2) in Figure 8 is a graph of the transition process when modeling a remote PID controller.
When analyzing the network of a distributed control system, the network topology and communication channels bandwidth are well-known. The objective is to reduce the delay time T of message flow λij under the specified restrictions. Sum of rates in i-th node therefore equals to the following:
$\sum\limits_{j}{{{\lambda }_{ij}}}={{\lambda }^{i}}$
where, $i,j=\overline{1,n}$, $i\ne j,$ n is a number of nodes.
Let's note
${{\lambda }_{k}}=\sum\limits_{\begin{smallmatrix} i=1 \\ j=1\end{smallmatrix}}^{a}{{{\lambda }_{ij}}}k$
as the flow rate within k-th channel. The delay time is expressed by the following formula [2]:
$T=\sum\limits_{k=1}^{m}{\frac{{{\lambda }_{k}}}{U}\cdot \left( \frac{1}{\mu {{C}_{k}}-{{\lambda }_{k}}} \right)},$ (1)
where, m is a number of channels; U is an aggregate rate of receiving messages; Ck is a bandwidth of k-th channel; 1/μ is an average message length (in bits).
Let's put the value λk into Eq. (1):
$T=\sum\limits_{k=1}^{m}{\frac{\sum\limits_{i,j=1}^{n}{{{\lambda }_{ijk}}}}{U}}\cdot \left( \frac{1}{\mu {{C}_{k}}-\sum\limits_{i,j=1}^{n}{{{\lambda }_{ijk}}}} \right)$
Let's provide a restriction:
$\sum\limits_{k\in {{S}_{ij}}}{{{\lambda }_{ijk}}}-{{\lambda }_{ij}}=0$
where, Sij is any cross-section of the graph that divides i-th and j-th nodes. Where λijk >0. By using a well-known method of Lagrange undetermined multipliers, we have the Lagrange function as follows:
${{T}^{'}}=\sum\limits_{k=1}^{m}{\frac{\sum\limits_{i,j=1}^{n}{{{\lambda }_{ijk}}}}{U}}\cdot \left( \frac{1}{\mu {{C}_{k}}-\sum\limits_{i,j=1}^{n}{{{\lambda }_{ijk}}}} \right)+\sum\limits_{i,j=1,i\ne j}^{n}{{}}\sum\limits_{{{S}_{ij}}}{{{\gamma }_{Sij}}}\sum\limits_{K\in {{S}_{ij}}}{{{\lambda }_{ijk}}}-{{\lambda }_{ij}},$ (2)
where, γSij is the Lagrange multiplier.
To search for the optimum, we should differentiate an Eq. (2) and equate it to zero.
The equation is solved with regard to λijk when using a numerical method. Another approach to solving the problem is as follows. A dataset switching network is considered. The network topology is described by a matrix C sized n×n, the elements of which have the variables of the communication channels bandwidth between i-th and j-th nodes. A matrix is symmetric. It has zero nodes and non-negative non-diagonal elements. If Cij – Cji > 0, then there is a communication channel having bandwidth Cij bit/s that binds i-th and j-th network nodes. Message flows are assumed to be of Poisson along with rates of ri messages per second. The average length of messages (datasets) within the network is 1/μ. The average message flow rate is known for each node. When transferring datasets via the communication channel between two nodes the average delay time in queue for processing is determined by the following expression:
${{\bar{t}}_{wait}}=\frac{\mu }{\mu C-u}\cdot \frac{1}{\mu C}$,
where, u is a message flow rate [1/s]; C is an effective bandwidth of the communication channel [bps]; 1/μ is an average message length [bits].
If i-th node is connected by communication channels with other nodes, then the problem of an optimal flow distribution is formulated as follows. Let's note by uij a message flow rate from i-th node to j-th one in [1/s]. Here uij = 0 if Cij (no connection). A stationary mode can only exist within the network given the solution of the following equality:
${{r}_{i}}+\sum\limits_{\begin{smallmatrix} j=1 \\ j\ne i\end{smallmatrix}}^{n}{({{u}_{ji}}-{{u}_{ij}})}={{y}_{i}}$ (3)
and inequality
$\mu {{C}_{ij}}>{{u}_{ij}}\ge 0$ (4)
where, ri is a rate of messages received from i-th node; yi is a rate of messages transferred from one node to another, meaning that all messages must reach the recipients.
A total time delay in queues for transfer in the stationary network mode is determined by the following expression:
$T=\sum\limits_{i=1}^{n}{\sum\limits_{\begin{smallmatrix} j=1 \\ j\ne i\end{smallmatrix}}^{n}{\left( \frac{{{u}_{ij}}}{\mu {{C}_{ij}}-{{u}_{ij}}}\cdot \frac{1}{\mu {{C}_{ij}}} \right)\to \min }}$ (5)
The optimization objective is to specify such variables uij, which satisfy restrictions of Eq. (3) and Eq. (4), as well as reduce functionality to a minimum Eq. (5). The problem is solved analytically using a method of Lagrange multiplier. By differentiating those uij, for which Cji > 0, we get a following system of algebraic equations as a required condition of extremum:
$\left\{ \begin{matrix} \begin{matrix} \frac{1}{(\mu {{C}_{ij}}-{{u}_{ij}})}+{{\lambda }_{i}}=0 \\ \sum\limits_{i=1}^{n}{\left( {{r}_{i}}+\sum\limits_{\begin{smallmatrix} j=1 \\ j\ne i\end{smallmatrix}}^{n}{({{u}_{ji}}-{{u}_{ij}})} \right)=0} \\\end{matrix} & \begin{matrix} i=\overline{1,n} \\ j=\overline{1,n} \\ j\ne i \\ {{C}_{ij}}>0 \\\end{matrix} \\\end{matrix} \right.$ (6)
Eq. (6) is solved using a numerical method, namely Newton's method. The search for a solution is carried out by constructing successive approximations and is based on the principles of simple iteration. The method has quadratic convergence. Attributes associated with data and resources transfer channels, as well as parameters related to routing, together represent a set of control variables that can be modified to ensure proper state of the network.
Another way to reduce the time delay in data transmission is to implement an algorithm for reducing collisions in the Ethernet network, which in this case is used as a data transmission channel between the control system and the control object. Ethernet networks use one of the most efficient methods for managing a local area network - Carrier Sense Multiple Access with Collision Detection (CSMA/CD) [32].
Networks with impact control (with collisions) are used as peer-to-peer non-priority systems [33]. This approach is widely used in computer networks and, in particular, applies in the context of Ethernet and the IEEE 802.3 standard. In a discovery-protected network, everyone is considered equal. However, it is possible to set a priority system based on different approaches. Before transmitting, the station needs to "check" the channel and determine if the channel is active. If the channel is idle, then any station that has data to transmit can send its frames on the channel.
In carrier sense networks, several capture methods are used. One method is the “non-persistent” carrier sensing method. Non-persistent Carrier Sense Multiple Access (CMSA) is a non-aggressive version of protocol that operates in the Medium Access Control (MAC) layer. Using CMSA protocols, more than one user or nodes send and receive data through a shared medium that may be a single cable or optical fiber connecting multiple nodes, or a portion of the wireless spectrum. In non-persistent CSMA, when a transmitting station has a frame to send and it senses a busy channel, it waits for a random period of time without sensing the channel in the interim and repeats the algorithm again. So, this method provides all nodes with the opportunity to start transmitting immediately after it turns out that the channel is free.
Another method used in time-slicing systems is the “p-hard” carrier sensing method. It assumes for each node some waiting algorithm (p means probability). For example, nodes A and B do not immediately start transmission after they detect that the channel is free. In this case, each station calls the program for generating a random number – the waiting time (several microseconds). If the node detects that the channel is busy, it waits for a certain period of time and makes a new attempt. It will send to the freed channel with probability p and delay the transmission with probability 1-p. Both considered methods can only transmit at the start of the procedure (if the channel is idle), but their behavior on a busy channel differs: non-persistent CSMA doesn't attempt to sense the channel and restarts its logical cycle, whilst p=0 necessarily gets stuck in an infinite loop of waiting (since it has zero probability of transmission even if the channel goes back to being idle).
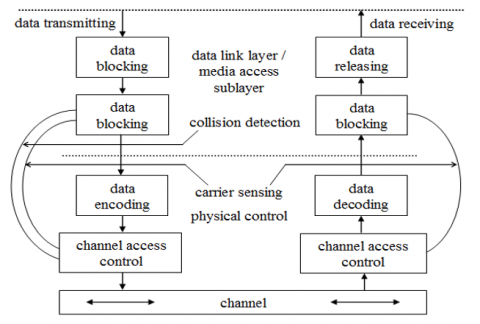
Consider the case of one indivisible resource - a communication channel (Figure 9). The state of the i-th process, in which the i-th process is waiting for the provision of a resource required by several processes, is called the active state and is denoted by $A_{i}^{i}$.
The state in which the i-th process does not require the provision of a resource is called the passive state and is denoted by $A_{0}^{i}$. The state space of the i-th process is denoted by${{L}_{i}}=\{A_{0}^{i},A_{i}^{i}\}$. A conflict occurs when multiple processes are active.
Figure 9. Model OSI for networks CSMA/CD
Control object modelling involves using asynchronous information exchange between applications running on different computers. In this case a client-server-based architecture is used. To control automation objects in real-time mode one should minimize delays in transferring datasets via the network. This can be achieved by searching for the optimal route of transferring messages, optimizing thread processing algorithms within network nodes, as well as dividing threads into service classes to specify the most priority ones. When solving problems of optimizing information flows, one should identify optimization criteria. Optimization criteria may include a variable of dataset transfer delay between two network nodes, the transfer rate, the amount of data transferred, the load of the information channel, as well as the reliability of data transfer. However, optimization of a single parameter may cause a deterioration in the AEPS automation equipment control quality. Optimizing time for dataset transfer via the network requires an increase in the transfer rate and usage of channels with a wide bandwidth along with high-speed routers. Therefore, the load factor of the transfer channel will be minor. Reducing the amount of data transferred may again cause a deterioration in the control quality. Thus, when solving optimization problems, one should consider all factors listed.
Conflict resolution for one process is the provision of a shared resource to one of the conflicting processes and the delay of other conflicting processes that are in the active state. The choice of such a process is determined by rule R of conflict resolution. The probability of exit of the i-th process from the active state is denoted by:
${{P}_{i}}=P_{00}^{i}=P_{10}^{i}$
and in active state:
$1-{{P}_{i}}=P_{01}^{i}=P_{11}^{i}$
where, i is the process number, index 0 means the passive state, and index 1 means the active state.
The rule R0 is optimal if it minimizes the average frequency of conflicts. Let’s find the optimal conflict resolution rule for reducing the average frequency of conflicts for an infinite system operation time. In the study [3], an optimization criterion is given, which has the form:
${{\psi }^{R}}(S,K)=\underset{T\to \infty }{\mathop{\lim }}\,\frac{1}{T}\sum\limits_{t=0}^{T}{M_{S}^{R}\chi ({{S}^{t}},K)\to \underset{\{R\}}{\mathop{\min }}\,}$
where, $M_{S}^{R}$ – expected value at initial state $S\in L$;
R – conflict resolution rule;
St – current state of a set of processes;
$\chi (S,K)=\left\{ \begin{align} & 1,S\in K \\ & 0,S\notin K \\\end{align} \right.$ – characteristic function; K is the set of states in the space L.
To reduce the time delay of packet transmission, optimization of packet routing in the network can also be used, but this approach is applicable for networks with an extensive system of communication channels, if there are alternative data transmission routes. In the problem being solved in this paper, there is only one communication channel, which can be accessed by several resources. Another optimization criterion is to minimize the cost of network equipment for the implementation of control functions. However, the use of the cost optimization criterion will not affect the reduction of time delays in the transmission of data packets and, accordingly, the improvement of the control quality indicators. Therefore, the optimal conflict resolution rule is proposed to use in order to decrease the time delay when using remote controller in a distributed control system with a single communication channel, which is shared between different resources.
The optimal conflict resolution rule R0, when several processes claim the same resource, is the rule according to which, when a conflict occurs, the resource is allocated to the process conflict that has the minimum probability of getting into the active state. This result has the following physical content: in the event of a conflict, preference should be given to one of the conflicting processes, which is less likely to conflict with other processes.
Consider the case of several indivisible resources for two parallel processes. Suppose two processes are running in parallel, but there are several resources due to which they conflict. This situation arises in widespread dual-processor computing systems with shared memory.
Thus, in this case n=2, r=1÷m (number of resources), the i-th process enters the state $A_{r}^{i}$ in the absence of another process with a probability:
$P_{r}^{i},\sum\limits_{r=0}^{m}{P_{r}^{i}}=1$, i=1,2.
The set of conflicts looks like:
$K=\{S\in L,\,\,{{S}_{1}}=A_{r}^{1}\,\,\wedge \,\,{{S}_{2}}=A_{r}^{2},\,\,1\le r\le m\}$,
denote $\alpha _{i}^{n}(A_{r}^{1},A_{r}^{2})$ – the average number of conflicts after n steps based on the states $(A_{r}^{1},A_{r}^{2})$, if at the first step preference is given to the i-th process, and then the optimal conflict resolution rule is used $\alpha _{0}^{n}(A_{r}^{1},A_{r}^{2})$; is the average number of conflicts after n steps, based on the state $(A_{r}^{1},A_{r}^{2})$, with the optimal conflict resolution rule. In accordance with the Bellman optimality rule [34]:
$\begin{align} & \alpha _{0}^{n}(A_{r}^{1},A_{r}^{2})=\min (\alpha _{1}^{n}(A_{r}^{1},A_{r}^{2}),\alpha _{2}^{n}(A_{r}^{1},A_{r}^{2})) \\ & \alpha _{1}^{n}(A_{r}^{1},A_{r}^{2})=1+P_{r}^{1}\alpha _{0}^{n-1}(A_{r}^{1},A_{r}^{2})+(1-P_{r}^{1})\alpha _{0}^{n-1}(N) \\ & \alpha _{2}^{n}(A_{r}^{1},A_{r}^{2})=1+P_{r}^{2}\alpha _{0}^{n-1}(A_{r}^{1},A_{r}^{2})+(1-P_{r}^{2})\alpha _{0}^{n-1}(N) \\ & \alpha _{0}^{n-1}(N)=\sum\limits_{j=1}^{m}{P_{j}^{1}}P_{j}^{2}\alpha _{0}^{n-2}(A_{j}^{1},A_{j}^{2})+(1-\sum\limits_{j=1}^{m}{P_{j}^{1}P_{j}^{2}})\alpha _{0}^{n-2}(N) \\\end{align}$
In the study [34] it is shown that:
$n\alpha _{0}^{n}(A_{r}^{1},A_{r}^{2})\ge \alpha _{0}^{n}(N)$,
from where at $P_{r}^{2}\ge P_{r}^{1}$ we get:
$\alpha _{0}^{n}(A_{r}^{1},A_{r}^{2})=\alpha _{1}^{n}(A_{r}^{1},A_{r}^{2})$.
The optimal conflict resolution rule R for the case where two processes claim multiple resources is the above rule. The effectiveness of the optimal rule can be evaluated analytically. For this, it is necessary to find the average frequency of conflicts with the optimal conflict resolution rule. In the study [35] it is shown that
${{\psi }^{R}}_{0}(S,K)=\sum\limits_{i=1}^{m}{{{\pi }_{{{R}_{0}}}}}(A_{r}^{1},A_{r}^{2})$,
where, ${{\pi }_{{{R}_{0}}}}(A_{r}^{1},A_{r}^{2})$ - stationary state probability with a fixed rule R0.
For the probabilities ${{\pi }_{{{R}_{0}}}}(A_{r}^{1},A_{r}^{2})$, i=1÷m, the following system of equations can be written considering normalization:
$\sum\limits_{i=1}^{m}{{{\pi }_{{{R}_{0}}}}}(A_{r}^{1},A_{r}^{2})+{{\pi }_{{{R}_{0}}}}(N)=1$,
where, N=L/K, that is, a non-conflict state:
${{\pi }_{{{R}_{0}}}}(A_{r}^{1},A_{r}^{2})=\min (P_{r}^{1},P_{r}^{2}){{\pi }_{{{R}_{0}}}}(A_{r}^{1},A_{r}^{2})+P_{r}^{1},P_{r}^{2}{{\pi }_{{{R}_{0}}}}(N),$
whence it follows:
${{\pi }_{{{R}_{0}}}}(A_{r}^{1},A_{r}^{2})=\frac{P_{i}^{1}P_{i}^{2}}{1-\min (P_{i}^{1}P_{i}^{2})}{{\pi }_{{{R}_{0}}}}(N)$,
and therefore:
$\begin{align} & \sum\limits_{i=1}^{m}{{{\pi }_{{{R}_{0}}}}}(A_{r}^{1},A_{r}^{2})=1-{{\pi }_{{{R}_{0}}}}(N)=& \left[ \sum\limits_{i=1}^{m}{\frac{P_{i}^{1}P_{i}^{2}}{1-\min (P_{i}^{1}P_{i}^{2})}} \right]/\left[ 1+\sum\limits_{i=1}^{m}{\frac{P_{i}^{1}P_{i}^{2}}{1-\min (P_{i}^{1}P_{i}^{2})}} \right] \\\end{align}$.
In this case:
${{\psi }^{{{R}_{0}}}}(S,K)=\frac{\sum\limits_{i=1}^{m}{P_{i}^{1}P_{i}^{2}/\left[ 1-\min (P_{i}^{1}P_{i}^{2}) \right]}}{1+\sum\limits_{i=1}^{m}{P_{i}^{1}P_{i}^{2}/\left[ 1-\min (P_{i}^{1}P_{i}^{2}) \right]}}$.
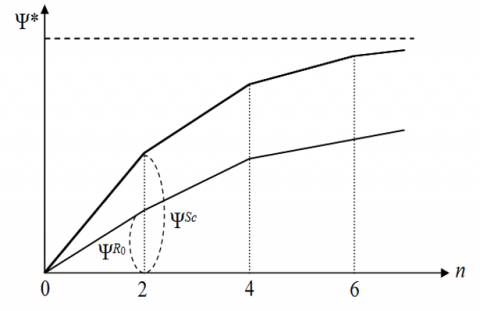
In Figure 10 the ratio of the average frequency of conflicts depending on the number of conflicting processes is shown:
Figure 10. The ratio of the average frequency of conflicts
The use of an optimal rule for conflict resolution reduces the frequency of conflicts by almost half compared to a rule that randomly (equiprobably) selects one of the conflicting processes. The inclusion of the described scheduling algorithm in the functional standards of the application and channel levels, and the construction of a complete machine algorithm will almost halve the frequency of conflicts for the resources of the information-computing system and, in the same way, improve its quality.
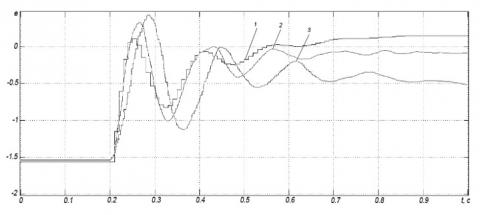
Figure 11 shows waveforms of signals at the digital regulator output at different variables of the time delay.
Thus, as can be seen from the Figure 11, an increase in the delay in the transmission of data packets over the network leads to a significant decrease in the quality of control and an increase in the static error. The presence of a positive static error for the case of the absence of time delays in data transmission (curve 1) is similar to the small value of the integral component of the PID controller, and the oscillation is similar to the small value of the differential component of the controller. At the same time, an increase in the time delay leads to the fact that the static control error becomes negative, which, in fact, is similar to a decrease in the coefficient of the proportional component of the PID controller. However, the figure shows that the nature of the transient processes for different time delays is the same and is determined by the control object itself and the settings of the PID controller coefficients. It should be noted that, theoretically, the use of the considered rule of optimal conflict resolution when accessing several resources to a communication channel reduces the frequency of conflicts in almost 2 times, and, consequently, the value of time delay. This will reduce the static control error. However, this also reduces the natural period of the system and the overshoot. With some delay in the control loop, a situation may arise when the static error is completely absent. Therefore, it is important to tune the PID controller of the control object, considering the delay introduced by the network, in order to obtain the best indicators of control quality.
Figure 11. Waveforms of signals at the digital regulator output at different time delay variables: 1 means there is no time delay; 2 means there is a 40 ms delay; 3 means there is an 80 ms delay
In the paper the influence of Ethernet network dynamics on the quality of diesel-generator control is considered. It has been established that the quality of the transient process depends on the sampling frequency and on time delays in the transmission of data packets over the Ethernet network. To control automation objects in real time, it is necessary to minimize packet transmission delays over the network. For an experimental study of the influence of a real network on control quality indicators, a multicomputer model of a diesel generator and its regulators, between which the network is provided as an element of data transfer, has been developed.
Z-transformation of the continuous transfer functions was performed to simulate digital speed controller of a diesel engine and excitation system of a synchronous generator. A diesel engine speed control system and an excitation system of a synchronous generator are presented in the form of digital state machine. The Lagrange's method of undetermined multipliers and Bellman optimality rule were used for the analytical solution of the problem of minimizing time delays.
A Matlab-model has been developed for the research of the impact of time delays on the diesel-generator control quality, in which the Ethernet network is used as a data transmission channel between control objects and regulators. A feature of the developed model is its distribution, and its individual parts, such as diesel-generators and regulators, can be replaced by real devices. Using the proposed model as a research tool allows to reduce the financial and time costs for setting up the automated control systems and its parts by conducting model studies, setting up and optimizing such systems to improve the efficiency of diesel-generator units in various operating modes.
The scientific novelty of the results obtained lies in the improvement of the analytical method for analyzing the characteristics of the automated control systems information processing network to study the influence of network dynamics on the quality of control of diesel-generators and determining the intensity of transmission of information and control packets, as well as using the proposed optimal conflict resolution rule, using which the transmission time delays data are minimal. In this case, the optimal rule for resolving conflicts that arise when several resources try to access the network at the same time is the rule according to which the resource is allocated to the process that has the minimum probability of becoming active. This reduces the number of conflicts between the processes claiming the resources of the information and computing subsystem of the ACS by almost 2 times. Due to this, an increase in the quality of control of diesel-generators is achieved.
[1] Kong, X.B., Liu, X.J., Ma, L.L., Lee, K.Y. (2019). Hierarchical distributed model predictive control of standalone wind/solar/battery power system. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(8): 1-12. https://doi.org/10.1109/TSMC.2019.2897646
[2] Elshafei, M. (2016). Modern Distributed Control Systems. CreateSpace Independent Publishing Platform, 478.
[3] Riabenkyi, V.M., Yurchenko, О.М., Ushkarenko, O.О., Sopel, М.F. (2012). Information support autonomous distributed control systems of electric power plants. Monograph. Kyiv: Institute of Electrodynamics, 208.
[4] Arti, M. (2015). Network load balancing and its performance measures. International Journal of Computer Science Trends and Technology (IJCST), 3(1): 77-81.
[5] Lacroix, Y., Malbranque, J.F. (2017). A unified approach for naval telecommunication architectures. World Academy of Science Engineering and Technology International Journal of Electronics and Communication Engineering, 11(9): 1-7.
[6] Al-Quteimat, A.M., Al-Soud, M.M., Eial Awwad, A.M., AlHawamleh, A., Zeidan, M., Ushkarenko, O., Dorohan, O. (2020). Research of the data exchange processes during the automated control of autonomous electric power systems. Journal of Electrical and Electronics Engineering, 15(2): 48-52. https://doi.org/10.9790/1676-1502024852
[7] Al-Suod, M.M., Ushkarenko, O., Dorogan, O. (2018). Research on information channel characteristics of a ship electric power system. Przegląd Elektrotechniczny, 94(6): 19-26. https://doi.org/10.15199/48.2018.06.04
[8] Ryabenkiy, V.M., Ushkarenko, A.O. (2015). Experimental investigation of time delays data transmission in automatic control systems. Problems of Information Technologies, 1(17): 42-45.
[9] Zhang, F., Cheng, L., Li, X., Sun, Y.Z. (2019). A prediction-based hierarchical delay compensation (PHDC) technique enhanced by increment autoregression prediction for wide-area control systems. IEEE Transactions on Smart Grid, 11(2): 1253-1263. https://doi.org/10.1109/TSG.2019.2934113
[10] Yong-Gil, K., Kyung-Il, M. (2016). adaptive time delay compensation process in networked control system. International Journal of Advanced Smart Convergence, 5(1): 34-46. https://doi.org/10.7236/IJASC.2016.5.1.34
[11] Stanislavovich, K.O., Sergeevich, K.D., Evgenievich, Y.M. (2020). Power station based on variable speed diesel generator and buffer storage device. Vestnik of Astrakhan State Technical University. Series: Marine Engineering and Technologies, 2020(3): 71-81. https://doi.org/10.24143/2073-1574-2020-3-71-81
[12] Zhang, D.F., Cui, J.H. (2015). Modeling and Simulation of the Emergency Diesel Generator Based on MATLAB. In: Wang, W. (eds) Proceedings of the Second International Conference on Mechatronics and Automatic Control. Lecture Notes in Electrical Engineering, vol 334. Springer, Cham. https://doi.org/10.1007/978-3-319-13707-0_1
[13] Stanislavovich, K.O., Aleksandrovich, T.I., Vadimovich, K.P. (2021). Ship power plant with reversible shaft generator unit operating by dual-power machine scheme and variable speed diesel generator. Vestnik of Astrakhan State Technical University. Series: Marine Engineering and Technologies, 2021(3): 93-100. https://doi.org/10.24143/2073-1574-2021-3-93-100
[14] Cuculić, A., Celic, J., Prenc, R. (2016). Marine diesel-generator model for voltage and frequency variation analysis during fault scenarios. Journal of Maritime & Transportation Science, 51(1): 11-24. https://doi.org/10.18048/2016.51.01
[15] Bijami, E., Farsangi, M.M. (2019). A distributed control framework and delay-dependent stability analysis for large-scale networked control systems with non-ideal communication network. Transactions of the Institute of Measurement and Control, 41(3): 768-779. https://doi.org/10.1177/0142331218770493
[16] Abukhait, J.J., Saleh, M.S. (2023). An adaptive confidentiality security service enhancement protocol using image-based key generator for multi-agent ethernet packet switched networks. International Journal of Electrical and Electronic Engineering & Telecommunications, 12(2): 112-123. https://doi.org/10.18178/ijeetc.12.2.112-123
[17] He, D.Q., Sun, D.L., Chen, Y.J., Liu, G.Q., Guo, S.L., Ma, R., Miao, J., Liu, J.R. (2021). Topology design and optimization of train communication network based on industrial ethernet. IEEE Transactions on Vehicular Technology, 71(1): 844-855. https://doi.org/10.1109/TVT.2021.3128143
[18] Lichtsinder, B.Y. (2022). Ethernet networks with deterministic delays. Vestnik of Samara State Technical University. Technical Sciences Series, 30(3): 81-97. https://doi.org/10.14498/tech.2022.3.6
[19] Oh, S.B., Do, Y.S., Lee, M.J., Kim, J.H., Jeon, J.W. (2023). Performance enhancement of CAN/ethernet automotive gateway with a CAN data reduction algorithm. Electronics, 12(13): 2777. https://doi.org/10.3390/electronics12132777
[20] Abbate, J. (2003). The triumph of ethernet: Technological communities and the battle for the lan standard (review). Technology and Culture, 44(3): 635-637. https://doi.org/10.1353/tech.2003.0099
[21] Bezprozvannych, G.V., Pushkar, O.A. (2023). Ensuring standardized parameters for the transmission of digital signals by twisted pairs at the technological stage of manufacturing cables for industrial operating technologies. Electrical Engineering & Electromechanics, 4: 57-64. https://doi.org/10.20998/2074-272X.2023.4.09
[22] Bai, R.G., Xia, J.Q., Man, Q.F. (2015). Real-time performance analysis of non-saturated and non-slotted Ethernet based on a two-dimensional collision state model. Frontiers of Computer Science, 9: 788-805. https://doi.org/10.1007/s11704-015-3306-z
[23] Dai, W.K., Foerster, K.T., Fuchssteiner, D., Schmid, S. (2023). Load-optimization in reconfigurable data-center networks: Algorithms and complexity of flow routing. ACM Transactions on Modeling and Performance Evaluation of Computing System, 8(3): 1-30. https://doi.org/10.1145/3597200
[24] Al-suod, M.M., Ushkarenka, A.O., Soliman, A.H., Zeidan, M., Eial Awwad, A.M., Al-Quteimat, A.M. (2020). Development of graphical analytical models for digital signal processing system structures. Jordan Journal of Electrical Engineering, 6(2): 140-153. https://doi.org/10.5455/jjee.204-1581484702
[25] Paez, M., Viola, J., Angel, L. (2018). Practical PID controller implementation for the speed control of a motor generator system. IOP Conference Series: Materials Science and Engineering, Bucaramanga, Colombia, 437: 012013. https://doi.org/10.1088/1757-899X/437/1/012013
[26] Jin, C.L., Wang, Q.G., Wang, R. (2022). Exponential stability of sampled-data control systems with enhanced average sampling interval. International Journal of Control, 96(7): 1744-1753. https://doi.org/10.1080/00207179.2022.2069051
[27] Bekishev, A., Toirov, O., Qurbonboyeva, D., Taniyev, M. (2019). Studies of vibrational stability of synchronous generators in MATLAB. Uzbek Journal of The Problems of Informatics and Energetics, 5: 70-77.
[28] Kuznetsov, A.G., Kharitonov, S.V. (2020). Formation of static characteristics of a diesel engine. Proceedings of Higher Educational Institutions Маchine Building, 1(718): 43-50. https://doi.org/10.18698/0536-1044-2020-1-43-50
[29] Fisco, N.R., Adeli, H. (2011) Smart structures: Part II – Hybrid control systems and control strategies. Scientia Iranica, 18(3): 285-295. https://doi.org/10.1016/j.scient.2011.05.035
[30] Kulakov, G., Artsiomenka, K. (2019). Compare of transient quality in automatic control systems with classic PID algorithm and optimal regulator. ENERGETIKA. Proceedings of CIS Higher Education Institutions And Power Engineering Associations, 62(2): 192-200. https://doi.org/10.21122/1029-7448-2019-62-2-192-200
[31] Alkenani, J., Nassar, K. (2022). Network monitoring measurements for quality of service: A review. Iraqi Journal for Electrical and Electronic Engineering, 18(2): 33-42. https://doi.org/10.37917/ijeee.18.2.5
[32] Choi, H.H., Lee, J.R. (2017). Multi-phased carrier sense multiple access with collision resolution and its extension to dynamic multi-phases. Mobile Networks and Applications, 22: 918-930. https://doi.org/10.1007/s11036-017-0855-4
[33] Kupershtein, L., Krentsin, M. (2021). Analysis of peer-to-peer network trends. Herald of Khmelnytskyi National University, 299: 26-29. https://doi.org/10.31891/2307-5732-2021-299-4-26-29
[34] Zhu, Y.J., Jia, G.Y. (2020). Dynamic programming and Hamilton-Jacobi-bellman equations on time scales. Complexity, 2020: 1-11. https://doi.org/10.1155/2020/7683082
[35] Gao, X.Z., Deng, Y. (2023). Inferable dynamic Markov model to predict interference effects. Engineering Applications of Artificial Intelligence, 117(Part A): 105512. https://doi.org/10.1016/j.engappai.2022.105512