Pedro de Sousa Carneiro*![]() | António Reis Pereira
| António Reis Pereira![]() | Miguel Mira da Silva
| Miguel Mira da Silva![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The deployment of Shared Autonomous Vehicles (SAVs) in urban areas is no longer a futuristic vision. Pilot projects are undeniable realities in various locations, and automakers research agendas are clear about this increasing autonomous trend. An ecosystem that supports the deployment of autonomous mobility is imperative, before this new type of mobility becomes a reality. Trying to understand what is absolutely essential in a city, to allow the operation of SAVs and to attract potential investors, is the aim of this research. This work started with a Systematic Literature Review (SLR), where the main concepts supporting SAVs were identified, and continued using a Topic Modeling approach, specifically Latent Dirichlet Allocation, to reach the most important topics and clusters, that were then modeled in ArchiMate into a possible ecosystem for the deployment of SAVs in urban areas. Finally, the reached model is confronted with a real case in order to establish a gap analysis between the theoretical reference model and what is already happening in Beijing. The result is an improvement of the reference model.
autonomous, mobility, modeling, shared, urban, vehicles
In Phoenix SAVs are already becoming a reality. In fact, at this moment, there are pilot projects in a testing phase in several cities [1].
This testing phase is being fueled by the various stakeholders that are taking steps towards autonomous mobility. The inherent disruption this will create, which is considered here not as a technology problem, but as a business model [2], can bring enormous benefits to society, as identified in the selected literature that is the base of this research.
Related to that, Cavazza et al. [3] observed a study gap related to business models, which the authors confirmed in the SLR phase, where most of found articles were about purely technical features.
Right now, forecast changes are undoubtedly relevant. In fact, according to the study [4], research results in all fields indicate that both short-term and long-term implications of AVs are expected to be significant, including possible adverse effects. So, there is controversy regarding the effects of autonomous mobility.
Wadud et al. [5], researching energy efficiency, concluded that high levels of automation for vehicles can decrease or increase total road transport energy, with the ultimate outcome depending on the extent to which autonomous transportation reduces the energy intensity and energy demand of travel, versus increasing overall demand for travel due to convenience and participation of user groups such as the elderly and disabled.
On the other hand, Soteropoulos et al. [6] highlighted that although private AVs are mostly found to increase vehicle miles travelled and reduce public transport and slow modes share, shared automated vehicle fleets, conversely, could have positive impacts, including reducing the overall number of vehicles and parking space.
Just to present a significant example, the International Transportation Forum has realized a study in the city of Lisbon in 2017, which concluded that the results of replacing private car traffic with new shared mobility services represent 210 football fields of land that can be freed after eliminating unnecessary parking spaces. They also concluded that 90% of the vehicles currently used would no longer be necessary and, as such CO2, emissions could be reduced by 27%.
The problem is that turning these test environments into a reality and spreading them all over the world will not be as simple as having an automaker produce and test Autonomous Vehicles (AVs). It goes well beyond that.
Beyond an automaker producing and testing the basic functionalities, such as perceiving the surrounding environment and making appropriate decisions in real time, using Artificial Intelligence (AI) [7], the urban areas where those cars will move will need to be adapted in order to accept this new type of mobility.
Therefore, the aim of our research is to understand the necessary elements of the ecosystem that a city or an urban area will need, in order to accept autonomous vehicles, i.e., which are the mandatory requirements to introduce them, if people accept this type of mobility. Hence, before we dive deeper into the type of ecosystem needed in order to support a driverless urban offer, we must emphasize people’s acceptance. Although this is not the scope of our research, it is an important assumption for the success of any introduction attempt of a new mobility solution.
With the acceptance pre-requisite in mind, under the EU Horizon 2020 Research and Innovation Program (https://h2020-trustonomy.eu/4-new-projects-on-the-european-horizon-of-the-autonomous-driving/), projects that focused on driver behavior and acceptance of connected, cooperative and automated transport have been supported.
As described, public authorities are quite concerned with the raise of autonomous mobility, allocating public funds in cooperation with private entities to research people’s acceptance, which is the base for the success of the deployment of this new solution.
Besides that, relevant academic research has been published. Etzioni et al. [8] modeled the mode choice between automated and conventional vehicles using a mixed multinomial logit heteroskedastic error component type model. They found that large reservations towards automated vehicles exist in six researched countries, with 70% conventional private car choices and 30% automated vehicles choices. They also concluded that men under the age of 60 with a high income who currently use private car are more likely to be early adopters of automated vehicles.
Through an online survey in eight European countries, Kyriakidis et al. [9] reconfirmed the importance of safety on the acceptance of AVs. Spearman correlations show that age, gender, education level and number of household members have an impact on how people may be using or allowing their children to use the technology, e.g., with or without the presence of a human supervisor in the vehicle. Results on vulnerable road users show the same trend. The elderly would travel in AVs with the presence of a human super- visor. People with disabilities have the same proclivity, however their reactions were more conservative. Next to safety, reliability, affordability, cost, driving pleasure and household size may also impact the uptake of AVs.
Finally, Feys et al. [10] compared the results of two pilots with different target groups in the same city through an online survey after passengers had experienced a ride. Results showed that more than 70% of the passengers expressed no concerns with regards to autonomous vehicles, and majority had a positive experience with an autonomous shuttle and evaluated it positively in terms of driving behavior, entry and exit and comfort. The regression analysis indicated that enjoyment of the ride is an important factor that contributes to the intention to use autonomous shuttles in the future.
The idea of the present research is the creation of a possible model for a SAVs ecosystem. A model that can then be instantiated and used everywhere, sup- porting both political decision makers and investors in their urban mobility strategical options. Naturally, considering region diversity, SAVs will require tailoring to local contexts for safe and efficient operation that will allow them to earn the trust of users [11]. Moreover, according to the same authors, cultural nuances in personal transportation will make ride sharing a business that is service first and technology second, with significant tailoring to local context required.
In order to reach this model, we started by performing a SLR, through which we identified 120 documents that corresponded to our focused subject. Then, supported by the fact that topic models are attractive because they discover groups of words that often appear together in documents [12], we used a Topic Modeling approach, in order to identify the words/ topics that better characterized such an ecosystem. After that, those words were grouped and then matched to ArchiMate Layers and Sub-Layers, enabling us to obtain a possible model, which includes the various stakeholders and their interactions, supporting shared autonomous mobility. Finally, that model is compared with a real situation, with the aim of being validated and improved.
This paper is structured as follows. In Section 2 we will start presenting the research, which includes an SLR, Topic Modeling, Word Similarity and Word Grouping. In Section 3 we continue presenting our research, with the steps to build an ArchiMate model, as well as the resulting model, on Subsection 3.1 and the explanation of the model on Subsection 3.2. In Section 4, we enlighten the main concepts behind Beijing SAV and demonstrate and evaluate the reference model. In Section 5, we present the lessons learned and the main contributions of this work. Lastly, In Section 6 we present our conclusion, including weaknesses, future research and the first effects of the COVID-19 pandemic.
2.1 Systematic literature review
A Systematic Literature Review (SLR) is a means of identifying, evaluating and interpreting all available research relevant to a particular research question, or topic area, or phenomenon of interest. It aims to present a fair evaluation of a research topic by using a trustworthy, rigorous, and auditable methodology [13].
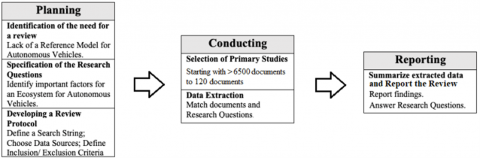
This SLR is based on Kitchenham’s Procedures for Performing Systematic Reviews, which has the following three steps [13].
Figure 1 represents these three steps adapted to our research.
Figure 1. SLR adapted to this research
SLR was chosen as the Research Methodology since our objective was to summarize the existent information on the subject of Modeling Ecosystems for Autonomous Vehicles and answer the specified Research Questions.
From our Systematic Literature Review (SLR) we were able to reach a final set of 120 documents, that focused on the search string topics, and from those documents we were able to get information regarding the main concepts needed to deploy SAVs in urban areas.
The reached results are not surprising since, as referred by the study [14], AV research is heterogeneous and registered a growing demand over time.
There are 120 documents [15-134] that were then used for topic modeling.
2.2 Topic modeling
Topic modeling is a statistical technique for revealing the underlying semantic structure in large collection of documents [135].
In this section we will present the topic modeling steps of this research, according to the study [136], which correspond to Steps 1 to 4, on Table 1. We will also present the steps preformed to prepare our final set of words to be modeled in ArchiMate, which correspond to Steps 5 to 8, on Table 1.
Table 1. Research steps after the SLR
|
Step |
Activity |
Section |
|
1 |
Gather the 120 documents |
2.1 |
|
2 |
Prepare the documents to be loaded in the software |
2.1 |
|
3 |
Run 20,000 iterations |
2.1 |
|
4 |
Get Top Words and Topic List |
2.1 |
|
5 |
Remove duplicates and non-related words |
2.1 |
|
6 |
Calculate similarity between words |
2.2 |
|
7 |
Remove similar words |
2.3 |
|
8 |
Concepts |
2.4 |
|
9 |
Classify words in ArchiMate Layers and Sub-Layers |
3 |
|
10 |
Model words in ArchiMate |
3 |
One example of topic modeling is Latent Dirichlet Allocation (LDA). LDA can be described as a generative probabilistic model for collections of discrete data such as text corpora. It is a three-level hierarchical Bayesian model, in which each item of a collection is modeled as a finite mixture over an underlying set of topics. Each topic is, in turn, modeled as an infinite mixture over an underlying set of topic probabilities. In the context of text modeling, the topic probabilities provide an explicit representation of a document [13].
After gathering all the 120 documents, they had to be prepared to be used on Mimno’s jsLDA (javacript LDA) web tool [136].
The jsLDA web tool is a user-friendly web-based implementation of LDA in javascript language, which offers instant presentation of results accompanied by a graphical view, giving the opportunity to the user to have a clear overview of the experiment [137].
To prepare the documents for upload, the corpus of each document was transformed into a single line and copied to a single file.
After all documents were copied to the file, they were uploaded to jsLDA. The “Document Smoothing” and “Word Smoothing” parameters were set to their default values of 0.1 and 0.01 respectively. We also set the number of topics to the default 36, and each topic to 10 words. Finally, we set up a “Stoplist”, containing a list of stop words, such as “but” and “or”, which was also uploaded to jsLDA.
Then, we ran 20,000 iterations, since that was the value at which we found the results to be more consistent, meaning that after that number of iterations the values remained unchanged.
Table 2. Excerpt of top 500 words
|
Word |
Frequency |
|
vehicles |
4685 |
|
vehicle |
3697 |
|
cars |
2324 |
|
mobility |
2062 |
|
driverless |
1905 |
|
data |
1896 |
|
traffic |
1774 |
|
car |
1655 |
|
transportation |
1591 |
|
technology |
1560 |
|
automated |
1328 |
|
parking |
963 |
|
urban |
961 |
|
automation |
838 |
|
connected |
801 |
|
infrastructure |
773 |
|
network |
707 |
|
smart |
579 |
|
communication |
567 |
|
self-driving |
508 |
|
sensors |
463 |
|
automotive |
413 |
|
sharing |
396 |
Table 3. Excerpt of the raw 360 words extracted from the topic list
|
authorities |
|
authorities |
|
authorities |
|
automaker |
|
automakers |
|
automated |
|
automated |
|
automation |
|
automation |
|
automation |
|
automation |
|
automobile |
|
automotive |
|
automotive |
|
automotive |
|
autonomously |
|
autonomy |
|
autonomy |
|
autonomy |
|
autopilot |
|
autopilot |
|
bao |
|
bikeshare |
|
bikesharing |
|
bluetooth |
|
brito |
|
bumps |
|
caliskan |
|
camera |
|
camera |
At this stage, we were able to reach two different results: a list of the top 500 words that were used more frequently in all the documents, of which a list of the top 20 is presented on Table 2, and a Topic List, containing 36 topics with 10 words each.
Considering that, in topic modeling, a topic provides an explicit representation of a document (in this case a set of documents), we considered that the 360 words that form the 36 topics (36 topics of 10 words each) are the words that best represent our set of 120 documents. An excerpt of those 360 words is presented on Table 3.
It is important to refer that the resulting set of 360 words was still “raw material”, meaning that there were many duplicate words as well as non-related words that had to be removed. After removing the referred duplicate and non-related words, we reached a set of 150 words.
2.3 Similarity
At this stage, we had a set of 150 words and, in order to verify if all those words were relevant to our model, we decided to calculate the similarity between them. This way, we would be able to remove similar words and maximize the chances of reaching a completely relevant set of words.
We then created a Similarity Matrix, where we placed all 150 words across the rows and columns.
To calculate the similarity between words, we used the Wu and Palmer (WUP) semantic similarity measure [138], implemented by the WS4J tool (https://ws4jdemo.appspot.com).
According to the study [139], the WS4J tool provides a pure Java API for several published semantic relatedness/ similarity algorithms for WordNet Search 3.1 (WNS), which is a large lexical database of English, developed by Princeton University [140].
In some cases, where the similarity could not be calculated directly because one of the words (or both words) were not on WNS, we used the root words. Also, we removed multi-word expressions (such as “robot-taxi”), if they could not be found on WNS, since, if decomposed in their root words (in this case “robot” and “taxi”), they would not maintain the same meaning. In these last referred situations, we also tried (unsuccessfully) calculating the similarity using Google “word dumps” together with Gensim (https://radimrehurek.com/gensim/).
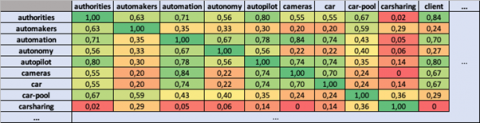
After calculating the similarity between all words, for each case of two different words that had a similarity level of 1 (between 0 and 1, being 1 the highest similarity level), we were able to remove one of them. The method we chose to select the word that should stay on our model was to check the previously referred list of the top 500 words (excerpt presented in Table 2) and to select the word that was more frequently used.
Finally, after removing similar words, we were able to reach a final set of 83 words. An excerpt of the final Similarity Matrix (of 83×83 words) is presented on Figure 2.
Figure 2. Excerpt of the final 83×83 Similarity Matrix
2.4 Concepts
After have reaching the final set of 83 words, we grouped them in Concepts, according their meaning and context.
Table 4. Concepts – Part 1
|
Word |
Concept |
|
automakers |
automakers |
|
vehicle |
car |
|
car |
car |
|
automation |
autonomy |
|
autonomy |
autonomy |
|
self-drive |
autonomy |
|
cameras |
Vehicle detection and positioning hardware |
|
laser |
Vehicle detection and positioning hardware |
|
lidar |
Vehicle detection and positioning hardware |
|
radar |
Vehicle detection and positioning hardware |
|
gpsheightsensors |
Vehicle detection and positioning hardware |
|
sonar |
Vehicle detection and positioning hardware |
|
car-pool |
car-pool |
|
carsharing |
carsharing |
|
ridesharing |
ridesharing |
|
client |
client |
|
travellers |
client |
|
server |
IT Support Infrastructure |
|
cloud |
IT Support Infrastructure |
|
communication |
V2X |
|
telecommunication |
V2X |
|
connections |
V2X |
|
internet |
V2X |
|
connectivity |
V2X |
|
network |
V2X |
|
interconnection |
V2X |
|
data |
data |
|
databases |
data |
|
e-mobility |
e-mobility |
|
electricity |
e-mobility |
|
energy |
e-mobility |
|
environment |
e-mobility |
In this research we are looking for a model that represents an ecosystem of essential stakeholders and components for the deployment of autonomous mobility in urban areas so, having that in mind we were able, at this stage, to identify each ecosystem element, most of the times as a group of more than one word.
Table 5. Concepts – Part 2
|
Word |
Concept |
|
fare |
fare |
|
fee |
fare |
|
firms |
firms |
|
fleet |
fleet |
|
fraud |
fraud |
|
roads |
physical infrastructure |
|
facilities |
physical infrastructure |
|
infrastructure |
physical infrastructure |
|
garage |
physical infrastructure |
|
drop-off |
physical infrastructure |
|
pickup |
physical infrastructure |
|
crosswalk |
physical infrastructure |
|
park |
physical infrastructure |
|
parking |
physical infrastructure |
|
insurance |
insurance |
|
insurers |
insurance |
|
premiums |
insurance |
|
metropolitan |
metropolitan |
|
authorities |
norms |
|
government |
norms |
|
municipality |
norms |
|
law |
norms |
|
political |
norms |
|
legality |
norms |
|
norms |
norms |
|
policy-makers |
norms |
|
regulations |
norms |
|
lawmaker |
norms |
|
researcher |
researcher |
|
privacy |
privacy |
|
protocols |
vehicle protocols |
|
moral |
vehicle protocols |
|
ethics |
vehicle protocols |
|
security |
security |
|
telecom |
telecom |
|
traffic |
traffic |
|
traffic-jam |
traffic |
|
transportation |
mobility |
|
mobility |
mobility |
|
rides |
mobility |
|
commute |
mobility |
|
computation |
vehicle AI platform |
|
autopilot |
vehicle AI platform |
Table 4 and Table 5 present the 83 words mapped to the final 29 Concepts.
In this section we will present the ArchiMate modeling steps and their result, which correspond to steps 8 and 9, on Table 1.
3.1 Reaching a model
The next step was to classify all 29 Concepts into ArchiMate Layers and Sub-Layers, using the ArchiMate 3.1 Specification [141]. Table 6 presents the match between the 29 Concepts and the ArchiMate Layers and Sub-Layers.
After classifying the Concepts, we used Archi – Open Source ArchiMate Modeling (https://www.archimatetool.com) to model them as well as their relationship with each other, according to ArchiMate Relationships [141].
Table 6. Concepts matched to ArchiMate Layers and Sub-Layers
|
Concept |
Layer |
Sub-Layer |
|
automakers |
Business |
Actor |
|
car |
Technology |
Function |
|
autonomy |
Technology |
Process |
|
vehicle detection and positioning hardware |
Technology |
Device |
|
car-pool |
Business |
Service |
|
carsharing |
Business |
Service |
|
ridesharing |
Business |
Service |
|
client |
Business |
Actor |
|
IT support infrastructure |
Technology |
Device |
|
V2X |
Technology |
Node |
|
data |
Strategy |
Resource |
|
e-mobility |
Implementation & Migration |
Deliverable |
|
fare |
Business |
Object |
|
firms |
Business |
Actor |
|
fleet |
Strategy |
Resource |
|
fraud |
Business |
Process |
|
physical infrastructure |
Strategy |
Resource |
|
insurance |
Business |
Product |
|
metropolitan |
Business |
Interaction |
|
norms |
Implementation & Migration |
Work Package |
|
researcher |
Business |
Actor |
|
privacy |
Business |
Contract |
|
vehicle protocols |
Implementation & Migration |
Work Package |
|
security |
Business |
Function |
|
telecom |
Business |
Actor |
|
traffic |
Business |
Interaction |
|
mobility |
Implementation & Migration |
Deliverable |
|
vehicle AI platform |
Technology |
Process |
|
wifi |
Technology |
Node |
It is important to refer that we classified the word “car” as a device because we consider that modern vehicles (and specifically cars) are, in fact, computers on wheels [142].
The resulting model is presented in Figure 3. It intends to systematize a possible ecosystem for SAVs in urban areas, and all the essential elements for the deployment of SAVs, as well as the relations between them, such as the relationships between policy-makers, moral and legal procedures, between firms, services, fleets and fees or between the hardware, software and infrastructure needed to create AVs, operate them and maintain connection with them and amongst them.
Figure 3. ArchiMate reference model to reach a possible ecosystem
3.2 Model description
The model presented in Figure 3 is the overall presentation of the various found stake- holders and elements as well as the relationships among them. It aims to represent the needed ecosystem to support SAVs, that is, what should exist in order to deploy such mobility concept in urban areas.
The way the elements are arranged was a choice of the authors and it could have been done differently (the idea was to show the model in a readable manner). On the other hand, the presented elements were not the authors’ decision, but in turn, the result of the described methodologies.
The scope of this work is shared autonomous solutions in urban areas, and the reached model presents the determinant elements to have a structured offer. There is not a single central element, although “firms” (here understood as the autonomous mobility provider), the “car” and of course the “client” (or end user), are all central and connected in several ways with remaining elements.
It is important to refer that in this predictive model, which is partially based on optimistic reality and will afterwards be confronted with reality, Vehicle-to-Vehicle and Vehicle- to-Infrastructure connections (both included in “V2X”) are available, providing the car with essential inputs for its operation. This means that the car is not only “intelligent” but it is also sourced by continuous information from the other cars and from the urban area infrastructure.
Some concepts, such as “telecom”, “insurers” and “automakers”, are providers, and other elements, such as “physical infrastructure”, “norms” and “traffic” are con- textual, i.e., something that exists in a SAV contextual deployment.
Regarding relationships, the idea was to try to keep them as simple as possible. For example, of course there is a relation between the “researcher” and “insurance”, but that would be an indirect relation, existing even before the deployment of SAVs, so it was skipped, in order to reach a cleaner and “easy to read” model.
“Metropolitan” areas must have the necessary “Physical Infrastructure”, that allows “Cars” to operate. These Cars are operated by “Firms”, in “Fleets”, and as such they need “Insurance”. The Operating Firms charge “Fares” to the “Client”, in order to provide the service of “Mobility” (“e-Mobility” in most cases), using the concept of “Ridesharing”, which includes both “Carsharing” and “Car-Pool”.
There is a relation between “Vehicle detection and positioning hardware”, “Vehicle AI platform” and “Autonomy”, since both first concepts are needed in order to implement the desired level of Autonomy. In the same way, there is a relation between “Vehicle AI platform” and “Vehicle Protocols” since the last concept is used on the first. Also, “Vehicle Protocols” are based on “Norms”.
The concept of “V2X” is used to allow “Cars” to communicate (using “Telecom” companies) with the “IT support infrastructure”, which is part of the operating “Firms”, and is used to keep important “Data”, such as “Client” Data. This Data is stored with the necessary levels of “Security” so that “Fraud” situations may be prevented and high “Privacy” levels are kept.
4.1 Beijing
After presenting a reference model based on scientific research, which is a predictive scenario of a possible future ecosystem supporting a ride-hailing service, based on autonomous vehicles, it is important to demonstrate that such a reference model may in fact work.
A purely theoretical model, with no real-life application lacks contribution value. For that reason, the authors researched real examples of such an offer, and decided to focus primarily on what was identified in Beijing, China since it not a pilot-project, like several existing ones, but instead a real commercial offer.
4.2 Why Beijing?
As referred before, there are already locations where people can take an autonomous cab. An example is the city of Beijing, China, specifically in the Winter Olympic Games area, where service is provided by Baidu.
Baidu is the dominant internet search engine company in China. Its features and services are similar to those of Google, but its focus is on China, where it controls most of the search market.
According Wang Chong, Chief Brand Officer of Baidu Intelligent Driving Group, backed by the company's solid foundation in Artificial Intelligence, Baidu provides a safe, intelligent and efficient autonomous driving technology system, from fully driverless operation to large-scale commercial operation.
It is public that customers can access fully shared autonomous vehicles in three Chinese cities, namely Beijing, Wuhan and Chongqing. After receiving the permit, Baidu became the first provider of fully driverless autonomous ride-hailing services in the capital city of China, without a driver in the car, which was the main reason why the authors decided to choose the Beijing case.
There is not a source presenting the ecosystem that allows the existence of Beijing’s ride-hailing service, which led to authors researching on the available publications what is behind Beijing’s service, with the aim of identifying the main concepts that sustain the Baidu Apollo ride-hailing service offer.
The focus of the scientific literature concerning Beijing trial is generically the technical side of autonomous mobility. The studies [143, 144] are examples of existing research.
Therefore, with the support of the referred documents and strongly based on widespread information found on publications like Motorauthority, Yicaiglobal, Caix- inglobal, Zdnet, Prnewswire, Just-auto or Abcnews, as well as based on the data shared by the automaker FAW and (specially) by Apollo, it was possible to establish the main concepts that allow this type of service in Beijing.
Table 7 presents the several mentioned concepts.
Once the main Beijing concepts were identified, it was possible to move on to a gap analysis between those concepts and reference model concepts.
Table 7. Concepts of Beijing ride-hailing service
|
Concept |
|
FAW |
|
Hongqi E Concept |
|
Level 4 |
|
Baidu/ Appolo Go |
|
Fleet of 10 vehicles |
|
Appolo Hardware Development Platform (Lidar, Radar, Cameras, Navigation, IPC, CAN, ASU, AXU, ACU) |
|
Software is Appolo Computing Unit |
|
V2X |
|
Baidu Appolo HD Map |
|
Appolo Game Engine Based Simulation |
|
More than six million miles of testing, public trials also up and running in the Yizhuang, Haidian and Shunryi areas. |
|
Baidu Shanxi Cloud Center |
|
Baidu Cloud |
|
510km of autonomy |
|
Operating in Beijing’s Shougang Park |
|
The local authority is Beijing’s Transport Commission |
|
Ride-hailing service |
|
Customers can be any person within designated area through an app |
|
Fixed fee CNY30 (US $4.60) per ride |
|
Client Interface is the Apollo Go App, QR code and health code |
|
8 pickup and drop-off stations |
|
Emergency through 5G Remote Driving Service, one person seating in rear seat |
|
44 internet providers in Beijing area |
|
Swiss Re is insurance provider |
|
Cybersecurity through Integrated solutions, products, services and laboratory, including partners |
|
One person seated in the rear seat for safety reasons |
|
Legal authorization to operate is the T4 license |
4.3 Gap analysis
At this stage, the authors attempted to understand if each concept on the reference model has a concept counterpart in Beijing.
Therefore, Table 8 establishes a match between the theoretical model and what was possible to identify in Beijing’s reality.
Table 8. Gap analysis between theoretical model and Beijing’s reality
|
Beijing Concepts |
Gap? |
Aggregated Group Words |
|
FAW |
No |
Automakers |
|
Hongqi E Concept |
No |
Car |
|
Level 4 |
No |
Autonomy |
|
Baidu/ Appolo Go |
No |
Firms |
|
Fleet of 10 vehicles |
No |
Fleet |
|
Appolo Hardware Development Platform (Lidar, Radar, Cameras, Navigation, IPC, CAN, ASU, AXU, ACU) |
No |
Vehicle detection and positioning hardware |
|
Software is Appolo Computing Unit |
No |
Vehicle AI platform |
|
V2X |
No |
V2X |
|
Baidu Appolo HD Map |
Yes |
|
|
Appolo Game Engine Based Simulation |
No |
Data, Researcher |
|
More than six million miles of testing, public trials also up and running in the Yizhuang, Haidian and Shunryi areas. |
No |
Data |
|
Baidu Shanxi Cloud Center |
No |
IT Support Infrastructure |
|
Baidu Cloud |
No |
IT Support Infrastructure |
|
510km of autonomy |
No |
E-mobility |
|
Operating in Beijing’s Shougang Park |
No |
Metropolitan |
|
The local authority is Beijing’s Transport Commission |
No |
Norms, Protocols |
|
Ride-hailing service |
No |
Ridesharing |
|
Customers can be any person within designated area through an app |
No |
Client |
|
Fixed fee CNY30 (US $4.60) per ride |
No |
Fare |
|
Client Interface is the Apollo Go App, QR code and health code |
Yes |
|
|
8 pickup and drop-off stations |
Partial |
Physical Infrastructure |
|
Emergency through 5G Remote Driving Service, one person seating in rear seat |
Yes |
Security |
|
44 internet providers in Beijing area |
No |
Telecom |
|
Swiss Re is insurance provider |
No |
Insurance |
|
Cybersecurity through Integrated solutions, products, services and laboratory, including partners |
No |
Privacy, Security, Fraud |
|
One person seated in the rear seat for safety reasons |
No |
Security |
|
Legal authorization to operate is the T4 license |
No |
Norms, Vehicle Protocols |
|
|
Yes |
Car-pool |
|
|
Yes |
Carsharing |
|
|
Yes |
Traffic |
|
|
Yes |
Mobility |
|
|
Yes |
Wifi |
In a high-level view, there are not many gaps, which might suggest that there is a significant correspondence between the reference model and Baidu’s Apollo ride- hailing service. Notwithstanding, there are mismatches that need to be analyzed, there are concepts in the reference model that were not identified in Beijing and there are concepts found in Beijing that do not exist in the reference model.
4.4 Baidu Apollo HD map (found in Beijing)
In the reference model, vehicles use LiDAR and all the other sensors to know their surroundings. They are also connected with other vehicles (V2V) and with the city infrastructure (V2I). This means that vehicles move based on historical data managed with AI, receiving inputs from sensors, from other vehicles and from the infrastructure. The reference to the mapping of the area where vehicles operate was not identified in research method, which is the opposite of what was found in Beijing, where the area was exhaustively mapped in order to allow vehicles to circulate, establishing if there are differences between what was mapped and what is perceived in each moment. For instance, if a pedestrian is in the middle of the street, that is a difference in comparison with the accurate mapping done before by Baidu Apollo, and therefore vehicle understands immediately there is something wrong, avoiding a trampling.
4.5 Physical infrastructure (partially found in Beijing)
It was not found in Beijing any reference related with a garage, car cleaning and daily preparation or a charging place. Does that mean those structures do not exist? Of course not, those are mandatory requirements that surely exist. However, the authors found pick-up drop-off locations, which means that in Beijing origin and destiny points are fixed.
4.6 Apollo Go App, QR code and health code (found in Beijing)
The access to the ride-hailing service in Beijing is done through an app, which was not identified in the reference model, although nowadays it can be inferred that an app or something similar will exist for sure. What was not definitively found in the reference model is that the app creates a QR code, adding the customer’s health data, and only after clearing the sanitary security will the car be unlocked and trip start. This gap is natural, because this security measure is a reaction to the Pandemic, and the majority of papers that sourced the reference model are from dates before the Pandemic. Nevertheless, it is a concept that should be considered from now on.
4.7 Emergency through 5G remote driving service, one person seated in rear seat (found in Beijing)
In Beijing, there is now one person seated in rear seat, which brings confidence to customers in an introduction phase. Does that mean that person will continue forever in Beijing ride-hailing offer? Surely not, which means that even though it was never identified in the reference model, the existence of that person is not a gap. Regarding the capacity of driving remotely the car, in case of need, that was not found in the reference model and that is a gap, because it is a security measure that not only brings confidence to customers but also avoids further problems if there is an incident on the road and the vehicle does not have the capacity to circulate. In such a case, Baidu Apollo can bring the car remotely to a safe location and solve the problem, which is an advantage vis-`a-vis the reference model.
4.8 Car-pool (found in reference model)
The reference model identified car-pool as a possibility. Considering that Car-pool by definition is the simple practice of different individuals coming together to use a single car for the commute, the concept here would be a different type of sharing, such as a person that owns an AV and shares that AV with other people. This is possible in principle, and it is neither denied nor confirmed by Beijing example.
4.9 Carsharing (found in reference model)
In Beijing, Baidu Apollo offers a ridesharing service, not a carsharing service. Carsharing is usually when the vehicle itself is shared amongst many people whilst, on the other hand, ridesharing is about sharing the route, rather than the vehicle.
Therefore, like car-pool, is possible in principle, and Beijing does not confirm or reject it.
4.10 Traffic and mobility (found in reference model)
The reference model has also these two group words, which are somehow related. Traffic also includes traffic-jam, and mobility comprises transportation, rides and commute, besides mobility itself.
In fact, although not mentioned in the raised concepts of Beijing, those are implicit concepts included in other identified concepts that do not add anything new to the reference model.
4.11 Wi-Fi (found in reference model)
This concept is related to mobile data (on phones) availability, which is a customer perk to promote car usage.
It was not found in Beijing, but it does not deny the reference model, which works without Wi-Fi.
As highlighted in Table 8, from the 29 reference model concepts, 5 were not identified in Beijing, and there were 3 concepts identified in Beijing that are not in the reference model.
Regarding the concepts to add to the reference model, the utilization of a mapping process to support vehicle operation seems to be an important support for vehicles operation, and in addition with V2X can avoid road incidents. In Beijing it is referred the existence of V2X, but that cannot be a complete V2X connection, because not all the vehicles are yet connected. The mapping can therefore play an important role while not all the connections are available. Moreover, an app that creates a QR code that ensures customers without sanitary issues is another addressed topic that can be added to the reference model. The existence of one person seated in rear seat, on the other hand, does not seem to be an indispensable concept that should have been raised in the research method, because although that person can bring some confidence, naturally will not exist after the introduction phase. Regarding the Remote Driving Service, that creates confidence to customers, being an important feature to add to the reference model.
About reference model concepts not identified in Beijing, the non-identification of a full physical infrastructure with garage, cleaning and charging place does not mean it can be avoided to exist. Car-pool and carsharing concepts were not identified in Beijing, which do not reject reference model – model works even without those concepts in place, ride-hailing is the service behind the model. Finally, the absence of counterpart in Beijing for the concept’s mobility, traffic and Wi-Fi does not also signify a correction to the reference model.
Altogether, to the best of our knowledge, Beijing validates and improves the model. The large majority of reference model concepts were found in Beijing, and the analysis of existing Beijing ride-hailing service, adding the mapping, the QR code to unlock the vehicle and the remote driving capability, boosts reference model.
The most relevant contribution of this research is the presented model, which means that the 120 papers that support the SLR, each one having a specific contribution, clearly show the indispensable stakeholders to support the deployment of SAVs in urban areas. Intuitively, it would not be possible in a different way. It is obvious that autonomous cars operated through a mobility-as-a-service scheme would always need a regulatory framework.
Also, a physical infrastructure (streets, garages, parking, pick-up and drop-off areas) is absolutely essential, as well as the existence of an operator, in order to supply and manage the sharing service, and so on. What is innovative in this research is that by selecting scientific documents and following scientific procedures (SLR, Topic Modeling) it was possible to obtain the group of stakeholders essential to the deployment of SAVs in urban areas, which can then be used as a “go/ no-go” decision-making tool for policy-makers and investors in their urban mobility strategical options, avoiding false starts and improving “time to market”.
The output of this research is a possible model that systematizes an ecosystem for SAVs in urban areas. The value proposition of this model is its ability to be instantiated to urban areas, presenting the essential conditions for shared autonomous mobility.
Conceptually, the model is the result of scientific documents and processes (SLR, Topic Modeling), which means it is grounded on a solid basis. However, this work has some limitations, starting with the fact that it begins with an SLR which, according to the study [145], presents relevant threats in terms of validity.
As referred, in this research we used different concepts (SLR, Topic Modeling, ArchiMate) in an area that is constantly changing, which means that the achieved result is only a possible model of an ecosystem for SAVs in urban areas, and not the unique or exclusive model.
Besides, this is a predictive model and not a descriptive model, so the reference model is not based on literature that describes a reality, it is based on literature that anticipates a future reality, and reality always brings news, which means that this model will need to be fine-tuned, incorporating findings from real situations.
That was the reason why the authors introduced a comparison with a real situation, in Beijing, where the reference model concepts were confirmed, and 3 other concepts were introduced, reinforcing the model.
Anyway, even with the validation with a real situation that works as an acid test, SLR that grounds this work was limited to articles launched until March 2021, which means that any paper launched after that date can change the model reached in this research.
Finally, while research for this paper was being done, an extraordinary event emerged (the COVID-19 pandemic), imposing changes on all human activities, and autonomous mobility is not an exception.
In fact, according to the study [4], the pandemic seems to have accelerated the development and use of certain forms of vehicle automation for supporting front-line health care (e.g., by delivering medical supplies to hospitals or elderly groups) and controlling the spread of the corona virus (e.g., by disinfecting public spaces), while the discussion about a significant modal shift from airplanes (i.e., short to mid-range trips) to automated vehicles has recently intensified.
At this stage, all these and others possible positive and negative effects are still in an embryonic stage of evaluation, yet without statistical evidences. Therefore, although there are vast news references, there is not yet data dully collected and researched, which provides ground for more future research.
Pedro de Sousa Carneiro, António Reis Pereira and Miguel Mira da Silva contributed to the design and implementation of the research, to the analysis of the results and to the writing of the manuscript.
On behalf of all authors, the corresponding author states that there is no conflict of interest.
[1] Chatman, D.G., Moran, M. (2019). Autonomous vehicles in the United States: Understanding why and how cities and regions are responding. University of California Institute of Transportation Studies.
[2] Christensen, C.M. (2006). The ongoing process of building a theory of disruption. Journal of Product Innovation Management, 23(1): 39-55.
[3] Cavazza, B.H., Gandia, R.M., Antonialli, F., Zambalde, A.L., Nicolaï, I., Sugano, J.Y., Neto, A.D.M. (2019). Management and business of autonomous vehicles: A systematic integrative bibliographic review. International Journal of Automotive Technology and Management, 19(1-2): 31-54. https://doi.org/10.1504/IJATM.2019.098509
[4] Milakis, D., Thomopoulos, N., Van Wee, B. (2020). Policy Implications of Autonomous Vehicles. Academic Press.
[5] Wadud, Z., MacKenzie, D., Leiby, P. (2016). Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transportation Research Part A: Policy and Practice, 86: 1-18. https://doi.org/10.1016/j.tra.2015.12.001
[6] Soteropoulos, A., Berger, M., Ciari, F. (2019). Impacts of automated vehicles on travel behaviour and land use: An international review of modelling studies. Transport Reviews, 39(1): 29-49. https://doi.org/10.1080/01441647.2018.1523253
[7] Ma, Y., Wang, Z., Yang, H., Yang, L. (2020). Artificial intelligence applications in the development of autonomous vehicles: A survey. IEEE/CAA Journal of Automatica Sinica, 7(2): 315-329. https://doi.org/10.1109/JAS.2020.1003021
[8] Etzioni, S., Hamadneh, J., Elvarsson, A.B., Esztergár-Kiss, D., Djukanovic, M., Neophytou, S.N., Sodnik, J., Polydoropoulou, A., Tsouros, I., Pronello, C., Thomopoulos, N., Shiftan, Y. (2020). Modeling cross-national differences in automated vehicle acceptance. Sustainability, 12(22): 9765. https://doi.org/10.3390/su12229765
[9] Kyriakidis, M., Sodnik, J., Stojmenova, K., Elvarsson, A.B., Pronello, C., Thomopoulos, N. (2020). The role of human operators in safety perception of av deployment—insights from a large European survey. Sustainability, 12(21): 9166. https://doi.org/10.3390/su12219166
[10] Feys, M., Rombaut, E., Vanhaverbeke, L. (2020). Experience and acceptance of autonomous shuttles in the Brussels capital region. Sustainability, 12(20): 8403. https://doi.org/10.3390/su12208403
[11] Sovacool, B.K., Griffiths, S. (2020). The cultural barriers to a low-carbon future: A review of six mobility and energy transitions across 28 countries. Renewable and Sustainable Energy Reviews, 119: 109569. https://doi.org/10.1016/j.rser.2019.109569
[12] Hu, Y., Boyd-Graber, J., Satinoff, B., Smith, A. (2014). Interactive topic modeling. Machine learning, 95: 423-469. https://doi.org/10.1007/s10994-013-5413-0
[13] Blei, D.M., Ng, A.Y., Jordan, M.I. (2003). Latent Dirichlet allocation. Journal of Machine Learning Research, 3: 993-1022.
[14] Gandia, R.M., Antonialli, F., Cavazza, B.H., Neto, A.M., Lima, D.A.D., Sugano, J.Y., Nicolai, I., Zambalde, A.L. (2019). Autonomous vehicles: Scientometric and bibliometric review. Transport Reviews, 39(1): 9-28. https://doi.org/10.1080/01441647.2018.1518937
[15] Wiegand, G., Eiband, M., Haubelt, M., Hussmann, H. (2020). “I’d like an explanation for that!” exploring reactions to unexpected autonomous driving. In 22nd International Conference on Human-Computer Interaction with Mobile Devices and Services, pp. 1-11. https://doi.org/10.1145/3379503.3403554
[16] Unseld, R. (2021). 6th International Conference Automated Driving 2020. ATZelectronics Worldwide, 16(1): 60-61. https://doi.org/10.1007/s38314-021-0581-3
[17] Bajpayee, D., Mathur, J. (2015). A comparative study about autonomous vehicle. In 2015 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, pp. 1-6. https://doi.org/10.1109/ICIIECS.2015.7193002
[18] Shea-Blymyer, C., Abbas, H. (2020). A deontic logic analysis of autonomous systems' safety. In Proceedings of the 23rd International Conference on Hybrid Systems: Computation and Control, pp. 1-11. https://doi.org/10.1145/3365365.3382203
[19] Calderón, F., Miller, E.J. (2020). A literature review of mobility services: Definitions, modelling state-of-the-art, and key considerations for a conceptual modelling framework. Transport Reviews, 40(3): 312-332. https://doi.org/10.1080/01441647.2019.1704916
[20] Fiosins, M., Friedrich, B., Görmer, J., Mattfeld, D., Müller, J.P., Tchouankem, H. (2016). A multiagent approach to modeling autonomic road transport support systems. In: McCluskey, T., Kotsialos, A., Müller, J., Klügl, F., Rana, O., Schumann, R. (eds) Autonomic Road Transport Support Systems. Autonomic Systems. Birkhäuser, Cham. https://doi.org/10.1007/978-3-319-25808-9_5
[21] Raj, A., Kumar, J.A., Bansal, P. (2020). A multicriteria decision making approach to study barriers to the adoption of autonomous vehicles. Transportation Research Part A: Policy and Practice, 133: 122-137. https://doi.org/10.1016/j.tra.2020.01.013
[22] Eilers, S., Boger, J., Fränzle, M. (2013). A path planning framework for autonomous vehicles. In 9th International Workshop on Robot Motion and Control, Kuslin, Poland, pp. 203-208. https://doi.org/10.1109/RoMoCo.2013.6614609
[23] Khoury, J., Khoury, J., Zouein, G., Arnaout, J.P. (2019). A practical decentralized access protocol for autonomous vehicles at isolated under-saturated intersections. Journal of Intelligent Transportation Systems, 23(5): 427-440. https://doi.org/10.1080/15472450.2018.1536859
[24] Durst, P.J., Goodin, C.T., Anderson, D.T., Bethel, C.L. (2017). A reference autonomous mobility model. In 2017 Winter Simulation Conference (WSC), Las Vegas, NV, USA, pp. 4026-4037. https://doi.org/10.1109/WSC.2017.8248112
[25] Bourbakis, N.G., Alamaniotis, M., Tsoukalas, L.H. (2017). A smart car model based on autonomous intelligent agents for reducing accidents. In 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, pp. 767-772. https://doi.org/10.1109/ITEC.2017.7993366
[26] Tan, S.Y., Taeihagh, A. (2021). Adaptive governance of autonomous vehicles: Accelerating the adoption of disruptive technologies in Singapore. Government Information Quarterly, 38(2): 101546. https://doi.org/10.1016/j.giq.2020.101546
[27] Al-Sabaawi, A., Al-Dulaimi, K., Foo, E., Alazab, M. (2021). Addressing malware attacks on connected and autonomous vehicles: Recent techniques and challenges. In: Stamp, M., Alazab, M., Shalaginov, A. (eds) Malware Analysis Using Artificial Intelligence and Deep Learning. Springer, Cham. https://doi.org/10.1007/978-3-030-62582-5_4
[28] Kant, K. (2020). Advanced persistent threats in autonomous driving. ACM SIGMETRICS Performance Evaluation Review, 47(4): 25-28. https://doi.org/10.1145/3397776.3397783
[29] Kim, Y., Park, Y., Seo, H.H., Choi, J. (2021). An empirical investigation of customer acceptance of self-driving cars. In Key Challenges and Opportunities for Quality, Sustainability and Innovation in the FOURTH INDUSTRIAL REVOLUTION: Quality and Service Management in the Fourth Industrial Revolution—Sustainability and Value Co-creation, pp. 73-97. https://doi.org/10.1142/9789811230356_0004
[30] Arena, F., Pau, G., Severino, A. (2020). An overview on the current status and future perspectives of smart cars. Infrastructures, 5(7): 53. https://doi.org/10.3390/infrastructures5070053
[31] Malik, S., Sun, W. (2020). Analysis and simulation of cyber attacks against connected and autonomous vehicles. In 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, pp. 62-70. https://doi.org/10.1109/MetroCAD48866.2020.00018
[32] Lindgren, T., Fors, V., Pink, S., Osz, K. (2020). Anticipatory experience in everyday autonomous driving. Personal and Ubiquitous Computing, 24(6): 747-762. https://doi.org/10.1007/s00779-020-01410-6
[33] Bucaioni, A., Lundbäck, J., Pelliccione, P., Mubeen, S. (2020, March). Architecting and analysing connected autonomous vehicles. In 2020 IEEE International Conference on Software Architecture Companion (ICSA-C), Salvador, Brazil, pp. 5-6. https://doi.org/10.1109/ICSA-C50368.2020.00009
[34] Hussain, R., Lee, J., Zeadally, S. (2018). Autonomous cars: Social and economic implications. IT Professional, 20(6): 70-77. https://doi.org/10.1109/MITP.2018.2876922
[35] Yaqoob, I., Khan, L.U., Kazmi, S.A., Imran, M., Guizani, N., Hong, C.S. (2019). Autonomous driving cars in smart cities: Recent advances, requirements, and challenges. IEEE Network, 34(1): 174-181. https://doi.org/10.1109/MNET.2019.1900120
[36] Cupek, R., Drewniak, M., Fojcik, M., Kyrkjebø, E., Lin, J.C.W., Mrozek, D., Øvsthus, K., Ziebinski, A. (2020). Autonomous guided vehicles for smart industries–the state-of-the-art and research challenges. In Computational Science – ICCS 2020. ICCS 2020. Lecture Notes in Computer Science(), vol. 12141. Springer, Cham. https://doi.org/10.1007/978-3-030-50426-7_25
[37] Bucchiarone, A., Battisti, S., Marconi, A., Maldacea, R., Ponce, D.C. (2020). Autonomous shuttle-as-a-service (ASaaS): Challenges, opportunities, and social implications. IEEE Transactions on Intelligent Transportation Systems, 22(6): 3790-3799. https://doi.org/10.1109/TITS.2020.3025670
[38] Nunes, A., Hernandez, K.D. (2020). Autonomous taxis & public health: High cost or high opportunity cost? Transportation Research Part A: Policy and Practice, 138: 28-36. https://doi.org/10.1016/j.tra.2020.05.011
[39] Konrardy, B., Christensen, S.T., Hayward, G., Farris, S. (2019). Autonomous vehicle parking. U.S. Patent No. 10,386,845. Washington, DC: U.S. Patent and Trademark Office.
[40] Sell, R., Soe, R.M., Wang, R., Rassõlkin, A. (2021). Autonomous vehicle shuttle in Smart City testbed. In: Zachäus, C., Meyer, G. (eds) Intelligent System Solutions for Auto Mobility and Beyond. AMAA 2020. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-030-65871-7_11
[41] Axelrod, C.W. (2019). Autonomous vehicles meet inhospitable roadways. In 2019 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, pp. 1-6. https://doi.org/10.1109/LISAT.2019.8816825
[42] Leonard, J.J., Mindell, D.A., Stayton, E.L. (2020). Autonomous vehicles, mobility, and employment policy: The roads ahead. Massachusetts Inst. Technol., Cambridge, MA, Rep. RB02-2020.
[43] Bagloee, S.A., Tavana, M., Asadi, M., Oliver, T. (2016). Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. Journal of Modern Transportation, 24: 284-303. https://doi.org/10.1007/s40534-016-0117-3
[44] Riggs, W., Beiker, S.A. (2020). Business models for shared and autonomous mobility. In: Meyer, G., Beiker, S. (eds) Road Vehicle Automation 7. AVS 2019. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-030-52840-9_4
[45] Jagst, J. (2020). Challenges impacting the mass deployment of autonomous vehicles. ATZelectronics Worldwide, 15(1): 8-13. https://doi.org/10.1007/s38314-019-0162-x
[46] PE, Y.J.S., Golias, M., Dedes, G., Douligeris, C., Mishra, S. (2019). Challenges, risks and opportunities for connected vehicle services in smart cities and communities. IFAC-PapersOnLine, 51(34): 139-144. https://doi.org/10.1016/j.ifacol.2019.01.056
[47] Dong, Z., Shi, W., Tong, G., Yang, K. (2020). Collaborative autonomous driving: Vision and challenges. In 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, pp. 17-26. https://doi.org/10.1109/MetroCAD48866.2020.00010
[48] Palevičius, V., Ušpalytė-Vitkūnienė, R., Damidavičius, J., Karpavičius, T. (2020). Concepts of development of alternative travel in autonomous cars. Sustainability, 12(21): 8841. https://doi.org/10.3390/su12218841
[49] Wollenstein-Betech, S., Houshmand, A., Salazar, M., Pavone, M., Cassandras, C.G., Paschalidis, I.C. (2020). Congestion-aware routing and rebalancing of autonomous mobility-on-demand systems in mixed traffic. In 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, pp. 1-7. https://doi.org/10.1109/ITSC45102.2020.9294258
[50] Tian, J., Chin, A., Yanikomeroglu, H. (2018). Connected and autonomous driving. IT Professional, 20(6): 31-34. https://doi.org/10.1109/MITP.2018.2876928
[51] Gkoumas, K., van Balen, M., Tsakalidis, A., Pekar, F. (2020). Connected and automated transport: Research and innovation capacity in Europe. Transportation Research Procedia, 48: 1778-1788. https://doi.org/10.1016/j.trpro.2020.08.213
[52] Damaj, I.W., Serhal, D.K., Hamandi, L.A., Zantout, R.N., Mouftah, H.T. (2021). Connected and autonomous electric vehicles: Quality of experience survey and taxonomy. Vehicular Communications, 28: 100312. https://doi.org/10.1016/j.vehcom.2020.100312
[53] Eichhorn, U. (2016). Connected driving: What remains to be done? ATZ worldwide, 118(12): 70-70. https://doi.org/10.1007/s38311-016-0149-7
[54] Pearmine, A. (2017). Connected vehicle, Internet of Things and Data Analytics Handbook, Wiley Online Library.
[55] Chan, C.Y. (2011). Connected vehicles in a connected world. In Proceedings of 2011 International Symposium on VLSI Technology, Systems and Applications, Hsinchu, Taiwan, pp. 1-4. https://doi.org/10.1109/VTSA.2011.5872243
[56] Faiyetole, A.A., Fulani, E.O. (2020). Consideration of users’ needs in regard to planning of intelligent transport solutions in an African Metropolis. Transportation in Developing Economies, 6: 1-12. https://doi.org/10.1007/s40890-020-0097-1
[57] Zou, B., Choobchian, P., Rozenberg, J. (2021). Cyber resilience of autonomous mobility systems: cyber-attacks and resilience-enhancing strategies. Journal of Transportation Security, 14: 137-155. https://doi.org/10.1007/s12198-021-00230-w
[58] Katrakazas, C., Theofilatos, A., Papastefanatos, G., Härri, J., Antoniou, C. (2020). Cyber security and its impact on CAV safety: Overview, policy needs and challenges. Advances in Transport Policy and Planning, 5: 73-94. https://doi.org/10.1016/bs.atpp.2020.05.001
[59] Jung, R., Wernerus, B. (2021). Cybersecurity for automated vehicles. ATZ worldwide, 123(1): 38-43. https://doi.org/10.1007/s38311-020-0605-2
[60] Škorput, P., Mandžuka, S., Bermanec, S., Vojvodić, H. (2020). Cybersecurity of autonomous and connected vehicles. In: Karabegović, I. (eds) New Technologies, Development and Application III. NT 2020. Lecture Notes in Networks and Systems, vol 128. Springer, Cham. https://doi.org/10.1007/978-3-030-46817-0_63
[61] Sorour, S., Abdel-Rahim, A. (2020). Decentralized autonomous electric mobility-on-demand services for individuals with physical and cognitive disabilities. Pacific Northwest Transportation Consortium.
[62] Harrow, D., Gheerawo, R., Boyd Davis, S., Phillips, D., Lockton, D., Mausbach, A., Wu, J., Ramster, G., Johnson, S., Meldaikyte, G., Piliste, P., Quinlan, D., Roberts, E., (2020). Driverless Futures: Design for Acceptance and Adoption in Urban Environments. Royal College of Art, London.
[63] Jellid, K., Mazri, T. (2021). DSRC vs LTE V2X for autonomous vehicle connectivity. In: Ben Ahmed, M., Rakıp Karaș, İ., Santos, D., Sergeyeva, O., Boudhir, A.A. (eds) Innovations in Smart Cities Applications Volume 4. SCA 2020. Lecture Notes in Networks and Systems, vol 183. Springer, Cham. https://doi.org/10.1007/978-3-030-66840-2_29
[64] Andorka, S., Rambow-Hoeschele, K. (2020). Ethical and social aspects of connected and autonomous vehicles: A focus on stakeholders’ responsibility and customers’ willingness to share data. In: José, R., Van Laerhoven, K., Rodrigues, H. (eds) 3rd EAI International Conference on IoT in Urban Space. Urb-IoT 2018. EAI/Springer Innovations in Communication and Computing. Springer, Cham. https://doi.org/10.1007/978-3-030-28925-6_2
[65] Dogan, E., Costantini, F., Le Boennec, R. (2020). Ethical issues concerning automated vehicles and their implications for transport. Advances in Transport Policy and Planning, 5: 215-233. https://doi.org/10.1016/bs.atpp.2020.05.003
[66] Enoch, M.P., Cross, R., Potter, N., Davidson, C., Taylor, S., Brown, R., Huang, H., Parsons, J., Tucker, S., Wynne, E., Grieg, D., Campbell, G., Jackson, A., Potter, S. (2020). Future local passenger transport system scenarios and implications for policy and practice. Transport Policy, 90: 52-67. https://doi.org/10.1016/j.tranpol.2020.02.009
[67] De Lemos, R. (2020). Human in the loop: What is the point of no return? In Proceedings of the IEEE/ACM 15th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, pp. 165-166. https://doi.org/10.1145/3387939.3391597
[68] Norstedt, E., Sahlberg, T. (2020). Human interaction with autonomous machines: Visual communication to encourage trust. Faculty of Engineering, Blekinge Institute of Technology.
[69] Rice, S., Winter, S.R., Mehta, R., Tamilselvan, G., Anania, E.C., Milner, M.N. (2021). Identifying the factors that predict a consumer's willingness to ride in various types of driverless vehicles. Technology in Society, 64: 101476. https://doi.org/10.1016/j.techsoc.2020.101476
[70] Agriesti, S., Brevi, F., Gandini, P., Marchionni, G., Parmar, R., Ponti, M., Studer, L. (2020). Impact of driverless vehicles on urban environment and future mobility. Transportation Research Procedia, 49: 44-59. https://doi.org/10.1016/j.trpro.2020.09.005
[71] Zomarev, A., Rozhenko, M. (2020). Impact of self-driving cars for urban development. Foresight and STI Governance, 14(1): 70-84. https://doi.org/10.17323/2500-2597.2020.1.70.84
[72] Tolmeijer, S., Kneer, M., Sarasua, C., Christen, M., Bernstein, A. (2020). Implementations in machine ethics: A survey. ACM Computing Surveys (CSUR), 53(6): 1-38. https://doi.org/10.1145/3419633
[73] Serova, O.A., Naniev, A.T. (2020). Intelligent Transport System as a Concept of Environmental Innovation in the Transport System. In: Kolmykova, T., Kharchenko, E. (eds) Digital Future Economic Growth, Social Adaptation, and Technological Perspectives. Lecture Notes in Networks and Systems, vol 111. Springer, Cham. https://doi.org/10.1007/978-3-030-39797-5_88
[74] Lee, R.S.T. (2020). Intelligent Transportation, Artificial Intelligence in Daily Life, Springer, Singapore.
[75] Chakraborty, S., He, T. (2020). Introduction to the special issue on transportation cyber-physical systems. ACM Transactions on Cyber-Physical Systems, 4(1): 1-3. https://doi.org/10.1145/3372495
[76] Li, Y., Bao, J., Zhang, Z.L., Benjaafar, S. (2020). Introduction to the special issue on urban computing and smart cities. ACM Transactions on Data Science, 1(3): 1-2. https://doi.org/10.1145/3412392
[77] Shladover, S.E., Lappin, J., Denaro, R.P. (2019). Introduction: The automated vehicles symposium 2017. In: Meyer, G., Beiker, S. (eds) Road Vehicle Automation 5. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-319-94896-6_1
[78] Smuts, M., Scholtz, B., Wesson, J. (2019). Issues in implementing a data integration platform for electric vehicles using the Internet of Things. In: Strous, L., Cerf, V. (eds) Internet of Things. Information Processing in an Increasingly Connected World. IFIPIoT 2018. IFIP Advances in Information and Communication Technology, vol 548. Springer, Cham. https://doi.org/10.1007/978-3-030-15651-0_14
[79] Di, X., Chen, X., Talley, E. (2020). Liability design for autonomous vehicles and human-driven vehicles: A hierarchical game-theoretic approach. Transportation Research Part C: Emerging Technologies, 118: 102710. https://doi.org/10.1016/j.trc.2020.102710
[80] Sagir, F. (2020). Mobility and safety impacts of autonomous vehicles. Doctoral dissertation, Purdue University Graduate School.
[81] Barckmann, J., Herchet, H., Körbel, G. (2020). Mobility concept of a street robot. ATZ Worldwide, 122(3): 16-21. https://doi.org/10.1007/s38311-020-0201-5
[82] Ordoukhanian, E., Madni, A.M. (2019). Model-based approach to engineering resilience in multi-UAV systems. Systems, 7(1): 11. https://doi.org/10.3390/systems7010011
[83] Baumann, F. (2020). New data mindset for autonomous driving. ATZelectronics Worldwide, 15(11): 44-48. https://doi.org/10.1007/s38314-020-0270-7
[84] Prakken, H. (2017). On making autonomous vehicles respect traffic law: A case study for Dutch law. In Proceedings of the 16th edition of the International Conference on Artificial Intelligence and Law, pp. 241-244. https://doi.org/10.1145/3086512.3086542
[85] Antonakoglou, K., Brahmi, N., Abbas, T., Fernandez-Barciela, A., Boban, M., Cordes, K., Fallgren, M., Gallo, L., Kousaridas, A., Li, Z., Mahmoodi, T., Strom, E., Sun, W., Svensson, T., Vivier, G., Alonso-Zarate, J. (2020). On the needs and requirements arising from connected and automated driving. Journal of Sensor and Actuator Networks, 9(2): 24. https://doi.org/10.3390/jsan9020024
[86] Kala, R., Warwick, K. (2012). Planning autonomous vehicles in the absence of speed lanes using lateral potentials. In 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, pp. 597-602. https://doi.org/10.1109/IVS.2012.6232148
[87] Basu, R., Ferreira, J. (2020). Planning car-lite neighborhoods: Examining long-term impacts of accessibility boosts on vehicle ownership. Transportation Research Part D: Transport and Environment, 86: 102394. https://doi.org/10.1016/j.trd.2020.102394
[88] Ukkusuri, S.V., Sezaki, K., Yabe, T., Tsubouchi, K. (2020). PredictGIS 2019 workshop report: Held in conjunction with ACM SIGSPATIAL 2019. SIGSPATIAL Special, 11(3): 34-37. https://doi.org/10.1145/3383653.3383666
[89] Joy, J., Gerla, M. (2017). Privacy risks in vehicle grids and autonomous cars. In Proceedings of the 2nd ACM International Workshop on Smart, Autonomous, and Connected Vehicular Systems and Services, pp. 19-23. https://doi.org/10.1145/3131944.3133938
[90] Sivrikaya, F., Khan, M.A., Bila, C., Albayrak, S. (2017). Reciprocal impact of autonomous vehicles and network resource management. In 2017 IEEE Vehicular Networking Conference (VNC), Turin, Italy, pp. 231-234. https://doi.org/10.1109/VNC.2017.8275640
[91] Tsakiridis, P.G. (2020). Redefining the urban vehicle for smart cities. International Hellenic University.
[92] Boddupalli, S., Ray, S. (2020). REDEM: Real-time detection and mitigation of communication attacks in connected autonomous vehicle applications. In: Casaca, A., Katkoori, S., Ray, S., Strous, L. (eds) Internet of Things. A Confluence of Many Disciplines. IFIPIoT 2019. IFIP Advances in Information and Communication Technology, vol 574. Springer, Cham. https://doi.org/10.1007/978-3-030-43605-6_7
[93] Poliak, M., Baker, A., Konecny, V., Nica, E. (2020). Regulatory and governance mechanisms for self-driving cars: social equity benefits and machine learning-based ethical judgments. Contemporary Readings in Law and Social Justice, 12(1): 58-64. https://doi.org/10.22381/CRLSJ12120208
[94] Dominic, D., Chhawri, S., Eustice, R.M., Ma, D., Weimerskirch, A. (2016). Risk assessment for cooperative automated driving. In Proceedings of the 2nd ACM Workshop on Cyber-Physical Systems Security and Privacy, pp. 47-58. https://doi.org/10.1145/2994487.2994499
[95] Wang, J., Zhang, L., Huang, Y., Zhao, J., Bella, F. (2020). Safety of autonomous vehicles. Journal of Advanced Transportation, 2020: 1-13. https://doi.org/10.1155/2020/8867757
[96] Ferreira, M., Damas, L., Conceicao, H., d'Orey, P.M., Fernandes, R., Steenkiste, P., Gomes, P. (2014). Self-automated parking lots for autonomous vehicles based on vehicular ad hoc networking. In 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, pp. 472-479. https://doi.org/10.1109/IVS.2014.6856561
[97] Narayanan, S., Chaniotakis, E., Antoniou, C. (2020). Shared autonomous vehicle services: A comprehensive review. Transportation Research Part C: Emerging Technologies, 111: 255-293. https://doi.org/10.1016/j.trc.2019.12.008
[98] Hao, M., Yamamoto, T. (2018). Shared autonomous vehicles: A review considering car sharing and autonomous vehicles. Asian Transport Studies, 5(1): 47-63. https://doi.org/10.11175/eastsats.5.47
[99] Segui-Gasco, P., Ballis, H., Parisi, V., Kelsall, D.G., North, R.J., Busquets, D. (2019). Simulating a rich ride-share mobility service using agent-based models. Transportation, 46(6): 2041-2062. https://doi.org/10.1007/s11116-019-10012-y
[100] Yazdizadeh, A., Farooq, B. (2020). Smart mobility ontology: Current trends and future directions. In: Augusto, J.C. (eds) Handbook of Smart Cities. Springer, Cham. https://doi.org/10.1007/978-3-030-15145-4_66-1
[101] Gelbal, S.Y., Guvenc, B.A., Guvenc, L. (2017). SmartShuttle: A unified, scalable and replicable approach to connected and automated driving in a smart city. In Proceedings of the 2nd International Workshop on Science of Smart City Operations and Platforms Engineering, pp. 57-62. https://doi.org/10.1145/3063386.3063761
[102] Legêne, M.F., Auping, W.L., Correia, G.H.D.A., van Arem, B. (2020). Spatial impact of automated driving in urban areas. Journal of Simulation, 14(4): 295-303. https://doi.org/10.1080/17477778.2020.1806747
[103] You, D.Y., Wang, H.Y., Yang, K.M. (2018). State-of-the-art and trends of autonomous driving technology. In 2018 IEEE International Symposium on Innovation and Entrepreneurship (TEMS-ISIE), Beijing, China, pp. 1-8. IEEE. https://doi.org/10.1109/TEMS-ISIE.2018.8478449
[104] Oliveira, C.M.D., Albergaria De Mello Bandeira, R., Vasconcelos Goes, G., Schmitz Gonçalves, D.N., D’Agosto, M.D.A. (2017). Sustainable vehicles-based alternatives in last mile distribution of urban freight transport: A systematic literature review. Sustainability, 9(8): 1324. https://doi.org/10.3390/su9081324
[105] Kirkpatrick, K. (2021). Technological responses to COVID-19. Communications of the ACM, 64(2): 17-19. https://doi.org/10.1145/3441288
[106] Kamargianni, M., Matyas, M. (2017). The business ecosystem of mobility-as-a-service. In transportation research board. 96th Transportation Research Board Annual Meeting, 8-12 January 2017, Washington DC, USA. Transportation Research Board.
[107] Porter, T. (2020). The design, regulation, and adoption of autonomous driving systems in smart sustainable urbanism. Contemporary Readings in Law and Social Justice, 12(1): 30-36. https://doi.org/10.22381/CRLSJ12120204
[108] Ku, S.Y., Conejos, S. Shared design framework for autonomous vehicles and land use interface. https://www.corp.at/archive/CORP2022_78.pdf.
[109] Dimitrakopoulos, G.J., Uden, L., Varlamis, I. (2020). The future of intelligent transport systems. Elsevier.
[110] Seuwou, P., Banissi, E., Ubakanma, G. (2020). The future of mobility with connected and autonomous vehicles in smart cities. In: Farsi, M., Daneshkhah, A., Hosseinian-Far, A., Jahankhani, H. (eds) Digital Twin Technologies and Smart Cities. Internet of Things. Springer, Cham. https://doi.org/10.1007/978-3-030-18732-3_3
[111] Hansen, P. (2021). The Hansen report: On automotive electronics. ATZelectronics worldwide, 16(3): 27. https://doi.org/10.1007/s38314-021-0598-7
[112] Wong, A. (2020). The laws and regulation of AI and autonomous systems. In: Strous, L., Johnson, R., Grier, D.A., Swade, D. (eds) Unimagined Futures – ICT Opportunities and Challenges. IFIP Advances in Information and Communication Technology, vol 555. Springer, Cham. https://doi.org/10.1007/978-3-030-64246-4_4
[113] Golbabaei, F., Yigitcanlar, T., Bunker, J. (2021). The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. International Journal of Sustainable Transportation, 15(10): 731-748. https://doi.org/10.1080/15568318.2020.1798571
[114] Jones, H. (2020). The social ethics of self-driving cars: Public perceptions and predictions of autonomous vehicle safety risks. Contemporary Readings in Law and Social Justice, 12(1): 37-43. https://doi.org/10.22381/CRLSJ12120205
[115] Jayaraman, S.K., Creech, C., Robert Jr, L.P., Tilbury, D.M., Yang, X.J., Pradhan, A.K., Tsui, K.M. (2018). Trust in AV: An uncertainty reduction model of AV-pedestrian interactions. In Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, pp. 133-134. https://doi.org/10.1145/3173386.3177073
[116] Zhang, R. (2020). Understanding customers’ attitude and intention to use driverless cars. University of Northumbria at Newcastle (United Kingdom).
[117] Yuen, K.F., Chua, G., Wang, X., Ma, F., Li, K.X. (2020). Understanding public acceptance of autonomous vehicles using the theory of planned behaviour. International Journal of Environmental Research and Public Health, 17(12): 4419. https://doi.org/10.3390/ijerph17124419
[118] Moniot, M., Ge, Y., Reinicke, N., Schroeder, A. (2020). Understanding the charging flexibility of shared automated electric vehicle fleets. SAE Technical Paper 2020-01-0941. https://doi.org/10.4271/2020-01-0941
[119] Razdan, R. (2020). Unsettled topics concerning automated driving systems and the development ecosystem (No. EPR2020004). SAE Technical Paper. https://doi.org/10.4271/EPR2020004
[120] Krasniqi, X., Hajrizi, E. (2016). Use of IoT technology to drive the automotive industry from connected to full autonomous vehicles. IFAC-PapersOnLine, 49(29): 269-274. https://doi.org/10.1016/j.ifacol.2016.11.078
[121] AIT, K.M., AIT, P.R., Loukea, M., Gaitanidou, E., Bekiaris, E., Giro, C. D1. 1: User clusters, opinion, research hypotheses and use cases towards future autonomous vehicle acceptance.
[122] Emami, A., Sarvi, M., Asadi Bagloee, S. (2019). Using Kalman filter algorithm for short-term traffic flow prediction in a connected vehicle environment. Journal of Modern Transportation, 27: 222-232. https://doi.org/10.1007/s40534-019-0193-2
[123] Reichenbach, M. (2020). ATZ Conference "Vehicles of Tomorrow". ATZ worldwide, 122(2): 70-71. https://doi.org/10.1007/s38311-019-0195-z
[124] Marres, N. (2020). What if nothing happens? Street trials of intelligent cars as experiments in participation. In: Maasen, S., Dickel, S., Schneider, C. (eds) TechnoScienceSociety. Sociology of the Sciences Yearbook, vol 30. Springer, Cham. https://doi.org/10.1007/978-3-030-43965-1_7
[125] Illium, S., Friese, P.A., Müller, R., Feld, S. (2020). What to do in the meantime: A service coverage analysis for parked autonomous vehicles. AGILE: GIScience Series, 1: 7. https://doi.org/10.5194/agile-giss-1-7-2020
[126] Berret, M., Seyger, R., Bernhart, W., Kirstetter, E., Winterhoff, M., Riederle, S. (2017). Tracking disruption signals in the automotive industry. Automotive Disruption Radar, 1.
[127] Moavenzadeh, J., Lang, N.S. (2018). Reshaping urban mobility with autonomous vehicles.
[128] Andersen, M., Dauner, T., Di Domenico, D., Lang, N., Jentzsch, A., Palme, T., Sadek, P. (2018). Where to profit as tech transforms mobility. Boston Consulting Group.
[129] Hawes, M. (2017). Connected and Autonomous Vehicles: Revolutionising Mobility in Society. London: Society of Motor Manufacturers and Traders (SMMT).
[130] Duvall, T., Hannon, E., Katseff, J., Safran, B., Wallace, T. (2019). A new look at autonomous-vehicle infrastructure. McKinsey & Company: Washington, DC, USA.
[131] Matley, J., Gandhi, M., Yoo, E., Jarmuz, B., Peterson, S. (2016). Insuring the Future of Mobility. Deloitte University Press.
[132] Goodall, W., Dovey, T., Bornstein, J., Bonthron, B. (2017). The rise of mobility as a service. Deloitte Review, 20(1): 112-129.
[133] Peter Viechnicki, A.K. (2015). Smart Mobility: Reducing Congestion and Fostering Faster, Greener, and Cheaper Transportation Options. Deloitte University Press.
[134] Shao, E. (2017). Self-driving car technology: When will the robots hit the road? Auto- motive Assembly.
[135] Kherwa, P., Bansal, P. (2019). Topic modeling: A comprehensive review. EAI Endorsed Transactions on Scalable Information Systems, 7(24). http://dx.doi.org/10.4108/eai.13-7-2018.159623
[136] Mimno, D. (2016). jsLDA: An implementation of latent Dirichlet allocation in javascript.
[137] Papachristopoulos, L., Kleidis, N., Sfakakis, M., Tsakonas, G., Papatheodorou, C. (2015). Discovering the topical evolution of the digital library evaluation community. In: Garoufallou, E., Hartley, R., Gaitanou, P. (eds) Metadata and Semantics Research. MTSR 2015. Communications in Computer and Information Science, vol 544. Springer, Cham. https://doi.org/10.1007/978-3-319-24129-6_9
[138] Wu, Z., Palmer, M. (1994). Verb semantics and lexical selection. arXiv preprint cmp-lg/9406033. https://doi.org/10.48550/arXiv.cmp-lg/9406033
[139] Wordnet similarity for java. Ws4j. Https://code.google.com/archive/p/ws4j/.
[140] Wordnet. Https://wordnet.princeton.edu.
[141] ArchiMate® 3.2 Specification. The Open Group. https://pubs.opengroup.org/architecture/archimate3-doc/.
[142] Determann, L., Perens, B. (2017). Open cars. Berkeley Technology Law Journal, 32(2): 915-988.
[143] Fan, H., Zhu, F., Liu, C., Zhang, L., Zhuang, L., Li, D., Zhu, W., Hu, J., Li, H., Kong, Q. (2018). Baidu apollo EM motion planner. arXiv preprint arXiv:1807.08048. https://doi.org/10.48550/arXiv.1807.08048
[144] Li, G., Li, Y., Jha, S., Tsai, T., Sullivan, M., Hari, S.K.S., Kalbarczyk, Z., Iyer, R. (2020). Av-FUZZER: Finding safety violations in autonomous driving systems. In 2020 IEEE 31st International Symposium on Software Reliability Engineering (ISSRE), Coimbra, Portugal, pp. 25-36. https://doi.org/10.1109/ISSRE5003.2020.00012
[145] Zhou, X., Jin, Y., Zhang, H., Li, S., Huang, X. (2016). A map of threats to validity of systematic literature reviews in software engineering. In 2016 23rd Asia-Pacific Software Engineering Conference (APSEC), Hamilton, New Zealand, pp. 153-160. https://doi.org/10.1109/APSEC.2016.031