Bellal Belkacemi | Salah Saad* | Zine Ghemari | Fares Zaamouche | Adel Khazzane
© 2020 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The present paper deals with healthy and improper bearing lubrication signals analysis using Discrete Wavelet Transform (DWT) enhanced by MATLAB/ Wavelets toolbox analysis. The identification of bearing faults from the time or the frequency domain are difficult due to non stationary vibration signal. Therefore, for more accurate faults information and identification of bearing with lubrication defects (improper or absence of lubrication), the DWT is used. The validation of this procedure is conducted by an experimental setup designed for vibration signal acquisition and the complete analysis is finalized by MATLAB/ Wavelets toolbox. The recorded data used for the validation are the signals of healthy and un-lubricated bearing driven at a rotation speed of 1500 rpm by 0.78 KW three phase induction motor. From the obtained results it can be observed that, for medium speeds DWT decomposition enhanced by MATLAB Wavelets Toolbox procedure is efficient for improper lubricated bearing related faults diagnosis and detection.
induction motor, fault diagnosis, lubrication defects, discrete wavelet transforms (DWT), MATLAB wavelets toolbox
Rotating machines such as induction motors reliability depends on bearing elements and components condition. In bearing, the reduced quantity or the absence of lubrication will produce high friction and vibration level due to contact between bearing elements. Thus, bearing wear occurs, leading to an increase in temperature and eventually bearing failure. Different defects in bearing are mainly inner race, outer race, balls and lubrication. Therefore, the lubricant defect can cause important bearing elements damage with downtime consequences so, it is an interesting issue in monitoring rotating machines. In the reported literature many works have studied and methods were proposed to solve the problems related to bearing defects in induction motors.
Vibratory signal analysis was applied in many mechanical faults detection and localization such as bearing elements (outer race, inner race, ball and train cage of the bearing) [1-3] and gear damage [4]. Many works carried out on bearing defects were reviewed [3, 5] and have showed that defects in bearings are identified with the help of signal parameters for the sound and vibration signals. Discrete Wavelet Transform (DWT) was also used to detect defect features from defected bearings as they produce vibrations [6], stator current signature analysis is also used [7]. Some techniques such as dual-tree complex wavelet transform (DTCWT), permutation entropy (PE) using the fuzzy means clustering (FCM) to identify fault types [8] and shaft-bearing model is also developed in order to investigate the rolling element vibrations [9]. Signal processing tools such as Gaussian function, convolution, Fast Fourier transform and comparison of methods of short-circuit fault diagnostic based on FFT and DWT approaches [10-15] were conducted to detect various bearing faults. Recent developments and applications of computational intelligence to condition monitoring and fault diagnosis are presented in ref. [16-19].
As lubrication failures are the primary cause of bearing elements defects. This interesting and important issue is studied in the literature, an overview of the bearing early failure in the mechanical systems with typical modes of electrical bearing failure including various damages and lubrication failures, were discussed by He et al. [20]. The work reported by Yusof and Ripin [21], investigates roller bearings with and without lubrication. The authors have concluded that overall vibration level of the bearing can be related to the surface degradation and low film thickness. The detection of poor lubricant bearings by applying both cyclo-stationary analysis and spectral kurtosis for the selection of a frequency band is presented by Pavle Boškoski et al. [22]. The authors concluded that improper lubrication is expressed as an increase in the spectral components at bearing cage and ball spin frequency. But Vadim et al. [23] have stated that the influence of the improper lubrication of friction pair can be detected as an increase in the vibration velocity amplitude spectral components. The work described by Onkar and Abhay [24] deals with the effect of lubricant contamination by solid particles on the dynamic behavior of rolling bearings. Vibration signals were analyzed in terms of Root Mean Square (RMS) values and also in terms of defect frequencies. The effect of this contamination on inner and outer races is given.
There are many causes for lubrication failures as poor lubricant or viscosity, increase in temperatures, contamination by external substances, pollution by dust or water and over-lubricating. However improper or/and poor lubrication with difficult operating conditions can lead to bearing failure. In addition, if a bearing has a poor lubrication, or if the lubricant has lost its lubricating properties, the result is metal-to-metal contact between rolling elements and inner and outer races causing an important wear.
However, in all these works, attention and focus on the problem of lubrication in particular, especially in terms of diagnosis and inspection using DWT in our knowledge has not been considered previously. In order to fulfill the objective of finding an efficient, simple and easy method for lubricant faults detection in induction motors an approach based on an experimental setup designed for vibratory signal acquisition with an additional tool of analysis performed in MATLAB/ wavelets toolbox is proposed.
The present paper is organized as follows: The first section is reserved to the introduction whereas the second explains the theoretical development and the experiments. The third section is focused on data acquisition and experimental procedure description. The fourth section presents the application of DWT for real vibratory signals analysis of healthy and improper lubricated bearing. The fifth section provides a discussion and an analysis of the results to show the effectiveness of the proposed approach. Finally, the concluding remarks and observations are given in section six.
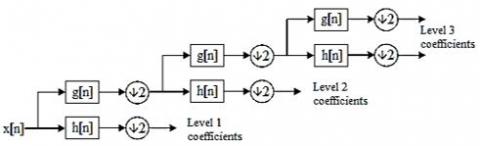
The theory and the detailed information of Discrete Wavelet Transform (DWT) are reported in the literature [10-15, 20]. The overall flow of wavelet decomposition process is conducted in many steps, firstly the raw vibration signal (original signal) x [n] is decomposed into several levels of frequency bands, then the approximate and detail coefficients in each level with standard deviation values for approximate and detail coefficients are found, finally, a comparison of standard deviation values for normal and faulty bearings is carried out [7]. The approximation part h [n] is obtained by passing the signal through Low Pass Filter (LPF) and Detail part g [n] is obtained by passing the signal through High Pass Filter (HPF). Thus, approximation corresponds to frequency band while detail covers the frequency range.
Figure 1. DWT decomposition process
The use of wavelet transform is of a particular interest since it gives information about the signal both in frequency and time domains. For reliable results, wavelet packet decomposition is used thus low frequency and high frequency characteristic components are obtained simultaneously. The decomposition process is illustrated in Figure 1, in discrete wavelet analysis, filters of different cut off frequencies are employed to analyze the signal at different levels. The output is implemented by scaling filter h(n) and g(n), which is a low-pass and high-pass filter related to scaling values. However, this operation doubles the frequency resolution, since the frequency band of the signal now spans only half the previous frequency band, effectively reducing the uncertainty in the frequency by half. Reduction of uncertainty in the signal will help to induce more exact information out of signal and that is the key point in DWT [10, 24-26].
The level of decomposition can be expressed as following:
$\begin{aligned} y_{\text {high}}[k] &=\sum_{n} x[n] . g[2 k\ n] \\ y_{\text {low}}[k] &=\sum_{n} x[n] . h[2 k\ n] \end{aligned}$
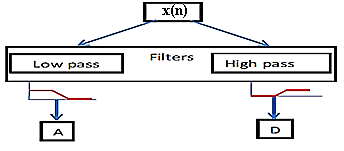
Figure 2. Double filtering process of original input signal x(n)
x(n) denotes the original input signal producing two signals A and D using two filters, A is the approximation of input signal and D is the detail value of x(n), this process is illustrated in Figure 2. A signal can be successively approximated by DWT with different scales [14]. A discrete signal x[n] can be decomposed as follows [26]:
$\mathrm{x}[\mathrm{n}]=\sum_{\mathrm{k}} \mathrm{a}_{\mathrm{j}_{0}, \mathrm{k}} \varphi_{\mathrm{j}_{0}, \mathrm{k}}[\mathrm{n}]+\sum_{j=\mathrm{j}_{0}}^{\mathrm{J}-1} \sum_{\mathrm{k}} \mathrm{d}_{\mathrm{j}, \mathrm{k}} \phi_{\mathrm{j}, \mathrm{k}}[\mathrm{n}]$
$\varphi_{j_{0}, k}[n]=2^{\frac{j_{0}}{2}} \varphi\left(2^{j_{0}} n-k\right)$: is the scaling function at a scale $s=2^{j_{0}}$ shifted by k.
ϕ(n): is the mother wavelet
$\phi_{j, k}[n]=2^{\frac{j}{2}} \phi\left(2^{j} n-k\right)$ is the mother wavelet at scale $s=2^{j_{0}}$ shifted by k.
$a_{j_{0}, k}$: Coefficients of approximation at $s=2^{j_{0}}$
$d_{j, k}$: Coefficients of detail at $s=2^{j}$
$N=2^{j}$ the number of samples of x[n]. In other words, a discrete signal could be constructed by means of a sum of a j-jo details plus a one approximation of a signal at a scale $s=2^{j_{0}}$.
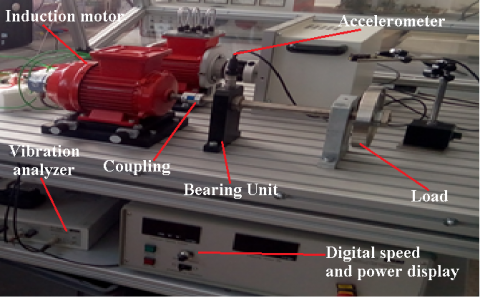
The experimental work is conducted by the measurement setup presented in Figure 3. The different vibration movement are generated by the shaft of the experimental setup driven by a three phase induction motor through a coupling, a bearing unit and a balanced flywheel (load). The vibration signal is detected and acquired for the analysis test bearings at a rotational speed of 1500 rpm.
Figure 3. Experimental setup
The setup chain is composed from a PC, an induction motor, USB measuring device, accelerometer, bearing unit and balanced flywheel (load). The vibration sensor used in the experiment is an accelerometer which measures the vibration movements generated by a three phase induction motor driving a load (mechanism). The vibratory signals are measured and recorded with a rotational speed of 1500 rpm on a healthy bearing and a faulty (improper lubrication) bearing, lubricant is polluted by injecting a special liquid inside the bearing for 48 hours. These testes represent a constraint that bearing can be exposed in daily life.
In the first step both vibratory signals of healthy and improper lubricated bearing are measured at a rotational speed of 1500 rpm. The obtained signals are analyzed by DWT technique and then finalized by MATLAB/ Wavelets toolbox.
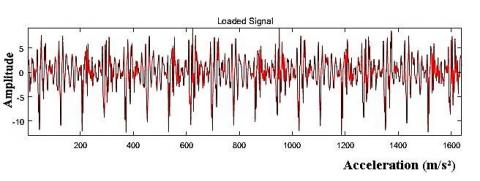
In order to validate the proposed procedure, experimental data (vibratory signals) obtained from the experimental setup for healthy and improper lubricated bearing are presented in this section. Discrete Wavelet Transform (DWT enhanced by MATLAB/ Wavelets toolbox signal analysis is proposed as a tool for improper or poor lubrication fault detection. The recorded data used for the validation of this method are the signals of healthy and faulty bearing under a running rotational speed of 1500 rpm presented in Figure 4 and Figure 6, respectively.
Figure 4. Measured vibratory signal of bearing in healthy condition
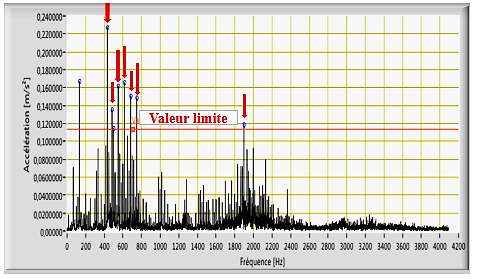
Figure 5. Frequency spectrum of healthy bearing
Figure 6. Measured vibratory signal of improper lubricated bearing
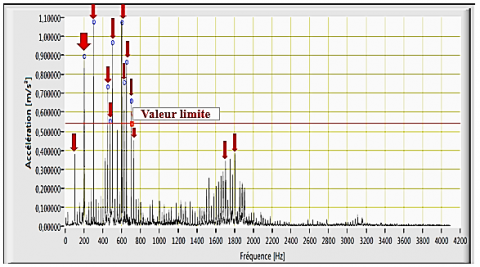
Figure 7. Frequency spectrum of improper lubricated bearing
On the spectrum of Figure 5, no significant peak is observed (the important peak has an amplitude of 0.23), this confirms that the bearing is in healthy condition. On the spectrum of Figure 7 it is can be noticed an increase in the peaks that already exist in the case of a healthy bearing (all important peaks exceeding the amplitude of 0.5). In the case of improper lubricated bearing, the bearing introduces additional space when a ball passes through the load area. As a result of these changes, the vibrations produced by the bearing balls passing through the load zone must be greater than those produced by a properly lubricated bearing. Thus, the increase in the amplitude of the vibrations produced by the balls of the rotating bearing can be used as an indication of deteriorated lubrication quality or a complete lack of lubricant.
But it is difficult to identify the frequency of fault appearance, there are changes in the magnitude of energy at different frequency bands. It can be concluded that the identification of bearing faults from the frequency spectrum are difficult due to non stationary vibration signal.
Therefore, further analysis of vibration data for healthy and improper lubricated bearing is needed. For more accuracy and precise identification of faults related to bearing lubricant, the DWT enhanced MATLAB Wavelets Toolbox is used for vibration signals analysis.
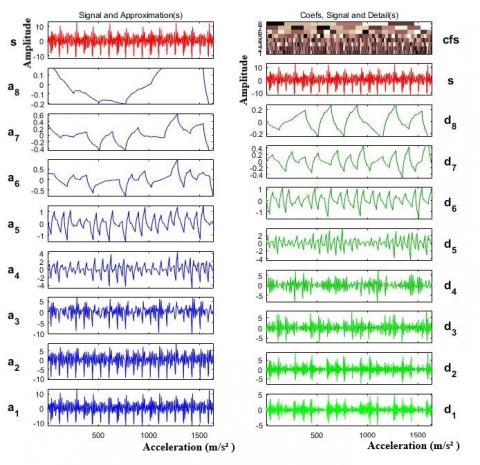
a) Approximation coefficient b) Detail coefficients
Figure 8. Eight-level wavelet decomposition of healthy bearing
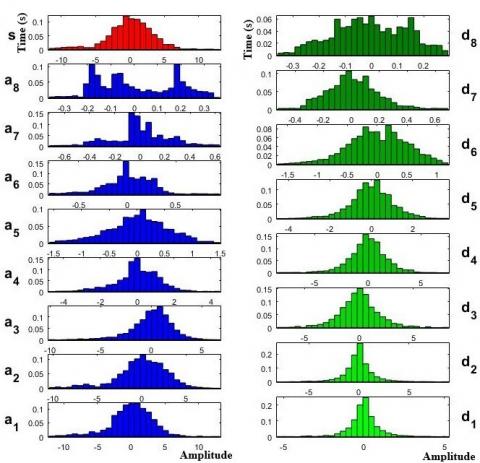
a) Approximation coefficients b) Detail coefficients
Figure 9. (a) Histogram of a) approximation coefficients and (b) detail coefficients for healthy bearing
a) Wavelet decomposition of vibration signal with healthy bearing at a rotational speed of 1500 rpm
The wavelet decomposition was carried out on the bearing data obtained from the designed experimental setup. The decomposition levels with values of approximate and detail coefficients for each level are obtained. De-Noising the original recoded signals using MATLAB Wavelets Toolbox [10, 16], the exact values of all detail coefficients at different levels are obtained. The results of approximation and detailed coefficients of wavelet transform and their histogram at each level of decomposition for healthy bearing are graphically illustrated in Figure 8 and Figure 9, respectively.
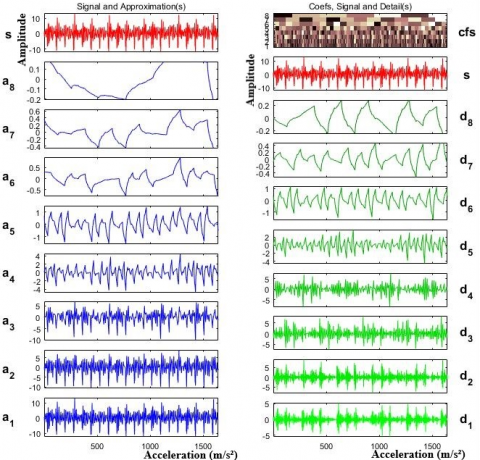
a) Approximation coefficients b) Detail coefficients
Figure 10. Eight-level wavelet decomposition of improper lubricated bearing
Table 1. Summarized results of computed approximation coefficients magnitude and ranges of healthy and faulty bearing
|
ApprLevel |
Magnitude range of each level (healthy bearing) |
Range |
Magnitude range of each level (improper lubricated bearing) |
Range |
|
a1 |
(-16.46) - (+11.35) |
27.81 |
(-6.657) -(+4.983) |
11.64 |
|
a2 |
(-19.1)- (+14.49) |
33.59 |
(-10.21)-(+10.79) |
21 |
|
a3 |
(-21.26)-(+12.41) |
33.67 |
(-16.05)-(+14.48) |
30.45 |
|
a4 |
(-10.94)-(+7.577) |
18.517 |
(-23.71)-(+15.77) |
39.48 |
|
a5 |
(-6.261)-(+4.445) |
10.706 |
(-11.51)-(+8.876) |
20.38 |
|
a6 |
(-3.509)- (+1.536) |
5.045 |
(-7.081)-(+6.82) |
13.90 |
|
a7 |
(-1.897)- (+2.144) |
4.041 |
(-0.964)-(+3.191) |
4.15 |
|
a8 |
(-0.86)- (+3.041) |
3.917 |
(-1.58)-(+0.88) |
2.46 |
Table 2. Summarized results of computed detail coefficients magnitude and ranges of healthy and faulty bearing
|
Detail Level |
Magnitude range of each level (healthy bearing) |
Range |
Magnitude range of each level (improper lubricated bearing) |
Range |
|
d1 |
(-5.69) - (+5.505) |
11.19 |
(-15.81) - (+15.26) |
31.07 |
|
d2 |
(-11.23)-(+11.52) |
22.75 |
(-16.86)-(+13.31) |
30.17 |
|
d3 |
(-13.18)-(+12.71) |
25.35 |
(-20.37)-(+11.49) |
31.86 |
|
d4 |
(-22.68)-(+12.73) |
35.41 |
(-12.28)-(+9.113) |
21.39 |
|
d5 |
(-13.21)-(+10.47) |
23.68 |
(-6.582)-(+5.25) |
11.83 |
|
d6 |
(-7.025)-(+5.525) |
12.55 |
(-3.424)-(+4.393) |
7.81 |
|
d7 |
(-2.827)-(+2.901) |
5.728 |
(-3.033)-(+5.534) |
8.56 |
|
d8 |
(-2.017)-(+4.424) |
6.441 |
(-2.697)-(+2.949) |
5.64 |
a) Approximation coefficients b) Detail coefficients
Figure 11. Histogram of approximation coefficients and detail coefficients of improper lubricated bearing
The ordinates a1 to a8 are the approximate coefficients for each level (eight levels) whereas the ordinates d1 to d8 are the detail coefficients for each level.
The approximation part h [n] of the original signal x(n) is obtained by passing the signal through Low Pass Filter (LPF) and the detail part g [n] of the original signal x(n) is obtained by passing the signal through High Pass Filter (HPF). Thus, approximation corresponds to frequency band while detail covers the frequency range.
b) Wavelet decomposition of vibration signal of improper lubricated bearing at a rotational speed of 1500 rpm
The results of approximation and detailed coefficients of wavelet transform and their histogram at each level of decomposition for improper lubricated bearing are graphically illustrated in Figure 10 and Figure 11, respectively. Computed values of magnitude ranges and ranges of approximation and detail coefficients for healthy and improper lubricated bearing for eight levels of signal wavelet decomposition are compared and presented in Table 1 and Table 2.
It is noticed that the vibration signal of healthy bearing has low magnitude peaks compared to the vibration signal of improper lubricated bearing. It is also observed that signal of healthy bearing has no periodic peaks whereas signal of improper lubricated bearing has periodic peaks.
It is observed from Figures 8 and 10, that the decomposed signal obtained from healthy bearing has less magnitude of approximation coefficients for all levels compared to the magnitude of faulty bearing (-2 to 2) and (-4 to 6) respectively. The same observation can be made for the detail coefficients (-2 to 2) for healthy bearing and (-4 to 6) for improper lubricated bearing. The results showed that the magnitudes of wavelet coefficients are sensitive to faulty bearing (improper lubricated bearing).
From Figures 9 and 11, it can be seen that the magnitude range is found to be lesser for healthy bearing condition than the un-lubricated bearing condition. These results show the sensitivity of detailed and approximation coefficients of DWT for identifying improper lubricated bearing.
According to Table 1, the approximation coefficient of healthy bearing reaches its maximum range value at level 3 (33.67) than decreases reaching its minimum range value at level 8 (3.917), whereas the approximation coefficient of faulty bearing (un-lubricated) reaches its maximum range value at level 4 (39.48) than decreases reaching its minimum value at level 8 (2.4681). It is observed from these results that the maximum value of healthy bearing (33.67) is less than the maximum value of faulty bearing (39.48) which means the approximation coefficient at level 5 is sensitive to un-lubricated bearing.
According to Table 2, the detail coefficient of healthy bearing reaches its maximum range value at level 4 (33.41) than decreases reaching its minimum range value at level 8 (6.441), while the detail coefficient of faulty bearing (un-lubricated) reaches its maximum range value at level 3 (31.86) than decreases reaching its minimum value at level 8 (5.646). It is can be concluded that the maximum value of healthy bearing (35.41) is higher than the maximum value of improper lubricated bearing (31.86) which means that the detail coefficient range value at level 3 is sensitive to bearing fault.
For the approximation coefficients, the maximum range value of healthy bearing should be less than the approximation coefficients of the maximum range value of faulty bearing. In contrast, the maximum range value of detail coefficient of healthy bearing should be higher than the maximum range value of detail coefficient of faulty bearing. Therefore, the obtained results are in compete concordance with the theory of DWT decomposition. Thus, it can be concluded that, for medium speeds DWT decomposition enhanced by MATLAB Wavelets Toolbox procedure is an efficient tool for fault detection. However, the wavelet approximation and detail coefficients can be easily used for the detection of lubricant defects, since the maximum range value of healthy bearing is less than that of improper lubricated bearing case for the approximation coefficients but for detail coefficient, the maximum range value of healthy bearing is higher than that of improper lubricated bearing. The obtained results are in agreements with the results of the previously reported literature [25, 26].
As failures related to lubricant are not previously widely investigated using DWT, the present work is conducted to consider this issue knowing that improper lubricated bearing is the main cause of bearing elements defects. In this paper, the wavelet decomposition procedure was discussed and applied to healthy and improper lubricated bearing for faults detection. The approximation and detail coefficients were found for eight levels of wavelet decomposition of the signal. According to the results, it can be concluded that, for medium speeds DWT decomposition procedure is efficient for improper lubricated bearing detection. Therefore, the wavelet approximation and detail coefficients can be easily used for the detection of lubrication defects.
Although the DWT decomposition has shown its effectiveness as it provides better accuracy in fault detection, future works will be focused on intelligent techniques as a promising method in bearing faults detection and monitoring.
The authors gratefully acknowledge the Algerian General Direction of Research (DGRSDT) for providing the facilities and the financial funding of this project.
[1] Kumbhar, A.J., Chhapkhane, N.K. (2014). Detection of the distributed defects on inner and outer race of ball bearing using vibration. International Journal of Engineering Research & Technology (IJERT), 3(11): 147-150.
[2] Patel, S.P., Upadhyay, S.H. (2019). Influence of roller defect and coupled roller–inner–outer race defects on the performance of cylindrical roller bearing. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 233(3). https://doi.org/10.1177/146441 9318819332
[3] Gupta, P., Pradhan, M.K. (2017). Fault detection analysis in rolling element bearing: A review. Materials Today: Proceedings, 4(2): 2085-2094. https://doi.org/10.1016/j.matpr.2017.02.054
[4] Nacib, L., Saad, S., Sakhara, S. (2014). A comparative study of various methods of gear faults diagnosis. Journal of Failure Analysis and Prevention, 14: 645-656. https://doi.org/10.1007/s11668-014-9860-0
[5] Tavner, P.J. (2008). Review of condition monitoring of rotating electrical machines. IET Electric Power Applications, 2(4): 215-247. https://doi.org/10.1049/iet-epa:20070280
[6] Nizwana, C.K.E., Ong, S.A., Yusof, M.F.M., Baharom, M.Z. (2013). A wavelet decomposition analysis of vibration signal for bearing fault detection. IOP Conference Series: Materials Science and Engineering. https://doi.org/10.1088/1757-899X/50/1/012026
[7] Deekshit Kompella, K.C., Mannam, V.G.R., Rayapudi, S.R. (2016). DWT Based ball bearing fault detection in induction motor using noise cancellation. Journal of Electrical Systems and Information Technology, 3(3): 411-427. https://doi.org/10.1016/j.jesit.2016.07.002
[8] Ma, P., Zhang, H.L., Fan, W.H., Wang, C. (2018). Novel bearing fault diagnosis model integrated with dual-tree complex wavelet transform, permutation entropy and optimized FCM. Journal of Vibroengineering, 20(2): 891-908. https://doi.org/10.21595/jve.2017.18278
[9] Arslan, H., Aktürk, N. (2008). An investigation of rolling element vibrations caused by local defects. Journal of Tribology, 130(4): 041101. https://doi.org/10.1115/1.2958070
[10] Ghods, A., Lee, H.H. (2014). A frequency-based approach to detect bearing faults in induction motors using discrete wavelet transform. 2014 IEEE International Conference on Industrial Technology (ICIT), Busan, South Korea. https://doi.org/10.1109/ICIT.2014.6894924
[11] Villanueva-Luna, A.E., Jaramillo-Nuñez, A. (2011). De-Noising Audio Signals Using MATLAB Wavelets Toolbox. in IntechOpen, Book Chapter, 2-54. https://doi.org/10.5772/19851
[12] Ibrahim, A., El Badaoui, M., Guillet, F., Youssef, W. (2006). Electrical signals analysis of an asynchronous motor for bearing fault detection. IECON 2006-32nd Annual Conference on IEEE Industrial Electronics, Paris, France. https://doi.org/10.1109/IECON.2006.347805
[13] Kandale, S.N., Gaikwad, J.A., Kulkarni, J.V. (2017). Bearing fault detection using gaussian filter bank. 2017 International Conference on Computing, Communication. Control and Automation (ICCUBEA), Pune, India. https://doi.org/10.1109/ICCUBEA.2017.8463979
[14] Sakhara, S., Saad, S., Nacib, L. (2017). Diagnosis and detection of short circuit in asynchronous motor using three-phase model. International Journal of System Assurance Engineering and Management, 8: 308-317. https://doi.org/10.1007/s13198-016-0435-1
[15] Nguyen, P.H., Kim, J.M. (2015). Multifault diagnosis of rolling element bearings using a wavelet kurtogram and vector median-based feature analysis. Shock and Vibration, 2015: 1-14. https://doi.org/10.1155/2015/320508
[16] Zhang, W., Jia, M.P., Zhu, L., Yan, X.A. (2017). Comprehensive overview on computational intelligence techniques for machinery condition monitoring and fault diagnosis. Chinese Journal of Mechanical Engineering, 30(4): 782-795. https://doi.org/10.1007/s10033-017-0150-0
[17] Zhao, B., Yuan, Q., Zhang, H. (2020). An improved scheme for vibration-based rolling bearing fault diagnosis using feature integration and AdaBoost tree-based ensemble classifier. Applied Sciences, 10(5): 1802. https://doi.org/10.3390/app10051802
[18] Purushottam, G., Rajiv, T. (2019). Diagnostics of mechanical and electrical faults in induction motors using wavelet based features of vibration and current through support vector machine algorithms for various operating condition. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 41: 71-96. https://doi.org/10.1007/s40430-019-1574-5
[19] Lahouasnia, N., Rachedi, M.F., Drici, D., Saad, S. (2020). Load unbalance detection improvement in three-phase induction machine based on current space vector analysis. Journal of Electrical Engineering Technology, 15: 1205-1216. https://doi.org/10.1007/s42835-020-00403-y
[20] He, F., Xie, G.X., Luo, J.B. (2020). Electrical bearing failures in electric vehicles. Friction, 8(1): 4-28 https://doi.org/10.1007/s40544-019-0356-5
[21] Yusof, N.F.M., Ripin, Z.M. (2018). The effect of lubrication on the vibration of roller bearings. 2018 International Conference on Vibration, Sound and System Dynamics (ICVSSD 2018), 217: 1-7. https://doi.org/10.1051/matecconf/ 201821701004
[22] Boškoski, P., Petrovčič, J., Musizza, B., Juričić, Đ. (2010). Detection of lubrication starved bearings in electrical motors by means of vibration analysis. Tribology International, 43(9): 1683-1692. https://doi.org/10.1016/j.triboint.2010.03.018
[23] Vadim, M., Artūras, K., Tetsman, I. (2013). Investigation of vibrational behavior of friction pair under starved lubrication conditions. Journal of Measurements in Engineering, 1(1): 40-43.
[24] Onkar, I.M., Abhay, A.U. (2012). Study of effect of solid contaminants in the lubricant on ball bearings vibration. International Journal of Instrumentation, Control and Automation (IJICA), 1(3-4): 112-115.
[25] Priya, V.S., Mahalashmi, P., Nadu, V.P.S. (2015). Bearing health condition monitoring: Wavelet decomposition. Indian Journal of Science and Technology, 8(26): 1-7. https://doi.org/10.17485/ijst/2015/v8i26/81712
[26] Srivani, A., Thangavelu, A., Denis Ashok, S. (2019). Fuzzy C-means based clustering and rule formation approach for classification of bearing faults using discrete wavelet transform. Computation, 7(4): 54. https://doi.org/10.3390/computation7040054